Изобретение относится к автоматическому управлению, а именно к двухпозиционному регулированию, и может быть использовано в системах автоматического двухпозиционного регулирования объектами как промышленного (регулирование уровня в кубах ректификационных, абсорбционных и иных колонн; температуры в нагревательных печах, зонах литьевых машин и экструдеров и т.п.), так и бытового назначения (холодильники, утюги).
Известен способ автоматического релейного регулирования, когда задают требуемое задание регулируемой величины и, в случае регулятора с прямой релейной характеристикой, формируют управляющее воздействие максимальной величины, если регулируемая величина больше задания, и минимальной, если она меньше задания или наоборот, если регулятор имеет обратную релейную характеристику. Основной недостаток такого способа регулирования заключается в тяжелой работе исполнительного элемента из-за его частотного срабатывания.
Другим способом является такой, при котором задают два значения задания регулируемой величины, определяющих зону неоднозначности, и формируют (при прямой характеристике) управляющее воздействие максимальной величины, если регулируемая величина стала больше большего из значений задания, и минимальной, если она становится меньше меньшего из значений (или наоборот при обратной характеристике регулятора). Этот способ называют двухпозиционным регулированием с зоной неоднозначности. Он позволяет избежать первого недостатка.
Однако и в том и другом способе можно улучшить качество регулирования, если использовать в них неполный приток и (или) отток энергии, т.е. способ двухпозиционного регулирования с использованием неполного притока и (или) оттока - прототип (см. например А.А. Кампе-Немм, Автоматическое двухпозиционное регулирование. М.: Наука, 1967, с. 27, 28). Кроме того, данный способ позволяет уменьшить частоту срабатывания исполнительного элемента. Недостатком способа-прототипа является то, что значения управляющих воздействий задаются фиксированными, что ухудшает качество регулирования объектов с меняющейся нагрузкой, вплоть до потери системой устойчивости, например, в случае превышения нагрузкой обоих значений управляющих воздействий позиций.
Цель изобретения улучшить качество двухпозиционного автоматического регулирования объектами с меняющейся нагрузкой, которая достигается тем, что значения управляющих воздействий (позиций регулятора) автоматически изменяются (адаптируются) в зависимости от значения нагрузки объекта.
Для реализации способа задают следующие сигналы: сигнал N срабатывания релейного элемента (номинальный), сигналы управляющих воздействий, соответствующих позициям релейного элемента, сигналы двух зон со значениями ± δ и ± Δ соответственно от сигнала N срабатывания релейного элемента, т.е. N ± Δ и N ± δ .
Номинальный сигнал используется как в обычном способе релейного регулирования для переключения управляющего воздействия с большего (U2) на меньшее (U1) или наоборот, причем в первоначальный момент формируют максимальное - U
Значения первой зоны используют для формирования значения управляющего воздействия, т.е. для его адаптации к нагрузке. При этом, если регулируемая величина превысит значение N + δ и при этом включено, например, большее воздействие U2 (верхняя позиция регулятора), то меньшее значение U1 увеличивается на определенную величину Δ U, т.е. приближается к верхнему управляющему значению на один шаг, принимая значение U1 + Δ U.
Если, напротив, при той же прямой характеристике регулятора регулируемая величина стала меньше номинального сигнала задания N и при этом включилось меньшее (U1) управляющее воздействие (нижняя позиция), а затем она стала меньше N - δ , то большее значение U2 уменьшается на ту же величину Δ U, т. е. приближается к меньшему управляющему воздействию на один шаг и станет равным U2 - Δ U.
Иначе, при выходе регулируемой величины за первую зону управляющее воздействие (позиция), не воздействующая на данный момент на объект, адаптируется в сторону позиции, воздействующей на объект, т.е. изменяется в сторону сближения управляющих воздействий (позиций).
Если регулируемая величина продолжает изменяться в сторону следующей зоны и превысит значение N + Δ или станет меньше N - Δ , то формируют вместо действующего управляющего воздействия его максимальное или минимальное значение соответственно, т.е. устанавливают крайнее значение действующей позиции, т.е. U
Наконец, возможен случай, когда в результате адаптации значения управляющих сигналов, воздействующих на объект регулирования и не воздействующих на объект регулирования, сравняются или даже возникнет ситуация, что U1≥U2, т. е. что сигналы перехлестнутся. В этом случае реадаптируют подготовленное управляющее воздействие путем обратной добавки Δ U (если она до этого была прибавлена, ее вычитают; если отнята - прибавляют), т.е. устраняют перехлест и вновь восстанавливают соотношение, при котором U1<U2. Для этого все время проводят сравнение U1 и U2 позиций и в случае их равенства или перехлеста формируют соответствующую команду для реадаптации сигнала соответствующей позиции.
На фиг. 1 приведена блок-схема системы регулирования, реализующая данный способ автоматического двухпозиционного регулирования (при прямой релейной характеристике регулятора).
Система состоит из адаптивного двухпозиционного регулятора I и объекта регулирования II с меняющейся нагрузкой F. Регулятор содержит шесть элементов сравнения 1-6 с пороговыми элементами, формирующих дискретные командные сигналы X1-X6, релейный элемент 7 с изменяющимися значениями верхней (U2) и нижней (U1) позиций, крайние значения которых могут достигать соответственно значений U
Командный сигнал X3 управляет переключением позиций с U1 на U2 или наоборот. Сигнал X2 через элемент 8 уменьшает значение U2 на ΔU, а сигнал X4 увеличивает значение U1 на Δ U. Сигнал X1 через элемент 9 возвращает управляющее воздействие U1 к своему крайнему значению U
Приняв командные сигналы X1-X6 в виде следующих логических зависимостей: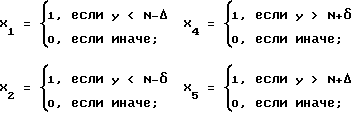

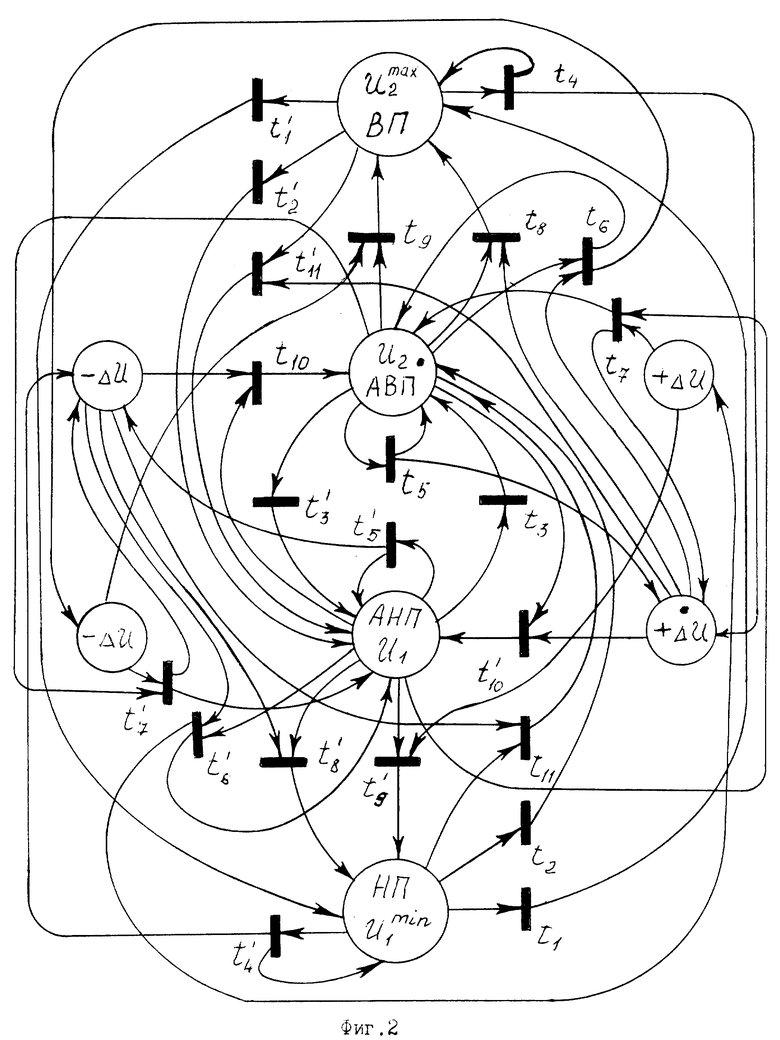
можно представить предлагаемый способ в виде алгоритма, описываемого сетью Петри (см. например, Юдицкий С.А., Магергут В.З. Логическое управление дискретными процессами. М.: Машиностроение, 1987) и представленного на фиг. 2.
Буквами в кружках на фиг. 2 обозначены:
ВП - верхняя крайняя позиция регулятора, равная U
НП - нижняя крайняя позиция регулятора, равная U
АВП - адаптивная верхняя позиция с текущим значением позиции U2;
АНП - адаптивная нижняя позиция с текущим значением позиции U1;
+ Δ U или - Δ U - шаг (величина) адаптации позиций.
На переходах (черточках) ti сети записываются условия их срабатывания в виде булевых функций от командных сигналов X1-X6. Для соответствующего перехода они такие: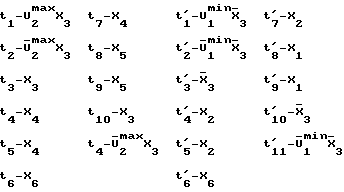
Начальная маркировка сети дана для случая работы верхней адаптивной позиции (метка в кружке АВП) и одновременной прибавки к нижней адаптивной позиции значения + Δ U (метка в нижнем кружке + Δ U). Верхний кружок + Δ U работает в алгоритме в случае реадаптации АВП при действующей на объект АНП.
Аналогичное назначение кружков - Δ U.
Сеть подтверждает однозначность предложенного способа адаптивного двухпозиционного регулирования.
В настоящее время авторы разрабатывают ряд устройств - регуляторов, работающих по данному способу, а также занимаются его программной реализацией с целью внедрения предложенного способа в системах регулирования промышленных и бытовых объектов.
Ожидаемое улучшение качества регулирования, особенно для объектов с меняющейся нагрузкой, является основанием получения экономических эффектов от его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2498386C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
Изобретение относится к автоматическому управлению, а именно к двухпозиционному регулированию, и может быть использовано как в промышленности, так и в бытовой технике для регулирования различных параметров. Техническим результатом является улучшение качества двухпозиционного автоматического регулирования объектов с меняющейся нагрузкой. Сущность изобретения состоит в задании пяти значений сигналов регулируемой величины: номинального, равного заданному значению и служащего для переключения позиций регулятора, двух значений зоны адаптации, отличающихся на ±δ от номинального, и двух значений зоны реадаптации, отличающихся на ±Δ от номинального, причем  и при выбеге сигнала регулируемой величины за сигналы зоны адаптации изменяют значение сигнала позиции, не воздействующей в данный момент на объект, на шаг ΔU в сторону сближения с сигналом действующей позиции, а при выбеге за зону реадаптации действующей позиции присваивают ее крайнее значение, при этом все время проводят сравнение сигналов позиций. 2 ил.
и при выбеге сигнала регулируемой величины за сигналы зоны адаптации изменяют значение сигнала позиции, не воздействующей в данный момент на объект, на шаг ΔU в сторону сближения с сигналом действующей позиции, а при выбеге за зону реадаптации действующей позиции присваивают ее крайнее значение, при этом все время проводят сравнение сигналов позиций. 2 ил.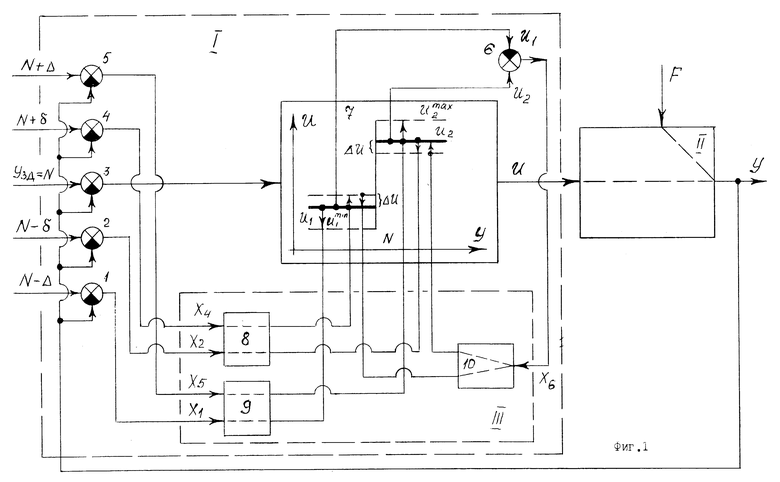
Способ автоматического двухпозиционного регулирования, основанный на задании сигнала N срабатывания релейного элемента и сигналов управляющих воздействий, соответствующих позициям релейного элемента, отличающийся тем, что дополнительно задают сигналы двух зон со значениями ± δ и ± Δ соответственно от сигнала N срабатывания релейного элемента, причем при выбеге сигнала регулируемой величины за сигналы первой зоны, т.е. за N ± δ, изменяют значение сигнала управляющего воздействия, не воздействующего в данный момент на объект регулирования, на шаг ΔU в сторону сближения с сигналом управляющего воздействия, воздействующим на объект регулирования, при выбеге сигнала регулируемой величины за сигналы второй зоны, т.е. за N ± Δ, формируют командные сигналы, которые возвращают сигнал управляющего воздействия, воздействующий на объект регулирования, на его крайнее значение, все время проводят сравнение сигнала управляющего воздействия, воздействующего на объект регулирования, и сигнала управляющего воздействия, не воздействующего на объект регулирования, и, в случае их равенства или перехлестывания, сигнал управляющего воздейсвия, не воздействующий на объект регулирования, изменяют на шаг ΔU в сторону удаления от сигнала управляющего воздействия, воздействующего на объект регулирования.
| Кампе-Немм А.А | |||
| Автоматическое двухпозиционное регулирование | |||
| - М.: Наука, 1967, с.27 - 28 | |||
| Клюев А.С | |||
| Двухпозиционные автоматические регуляторы и их настройка | |||
| - М.: Энергия, 1967, с.66-70 | |||
| В. В. Рыбальченко\ВМБЛеяОлЬйЛ | 0 |
|
SU264021A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКОМ ПО ДВУМ КООРДИНАТАМ | 1973 |
|
SU429416A1 |
| Пневматический двухпозиционный регулятор | 1987 |
|
SU1411706A1 |
| ДВУХПОЗИЦИОННЫЙ БЕСКОНТАКТНЫЙ РЕГУЛЯТОР | 0 |
|
SU200924A1 |
