Изобретение относится к области авиационного приборостроения, в частности к системам, обеспечивающим групповое самолетовождение.
Известна система формирования относительных координат [1] содержащая первый датчик координат и углов (одного самолета) ДКУС1, первый датчик координат цели (относительно одного самолета) ДКЦ1, второй датчик координат и углов (другого самолета) ДКУС2, второй датчик координат цели (относительно другого самолета) ДКЦ2. ДКУС1 определяет относительно связанные с землей системой координат углы эволюции самолета α1i (угол курса α11, угол крена α12, угол тангажа α13 и координаты местоположения самолета X1i (продольная координата X11 боковая координата X12, высота X13). С одного выхода ДКУС1 углы α1i поступают на вход ДКЦ1, а с другого выхода ДКУС1 координаты X1i выдаются потребителям в систему управления, на индикацию летчику, в прицельную систему.
ДКЦ1, являющийся радиолокационным или оптико-электронным датчиком, определяющим координаты одного самолета относительно цели в системе координат, реализуемой в ДКУС1, Xц1i (Хц11 относительная продольная координата, Хц12 относительная боковая координата, Хц13 - относительное превышение), выдаваемые потребителям с выхода ДКЦ1.
На другом самолете, аналогично в ДКУС2 формируются углы α2i, с одного выхода ДКУС2 подаваемые на вход ДКЦ2, где формируются координаты другого самолета относительно той же цели Хц2i, выдаваемые потребителям. С другого выхода ДКУС2 координаты другого самолета X2i также выдаются потребителям.
Технический результат изобретения расширение функциональных возможностей системы за счет определения точных относительных координат одного самолета относительно другого, что обеспечивает групповое самолетовождение.
Указанный результат достигается тем, что в информационную систему группового самолетовождения, содержащую последовательно соединенные первый датчик координат и углов самолета и первый датчик координат цели, последовательно соединенные второй датчик координат и углов самолета и второй датчик координат цели, дополнительно ведены объединенные в кольцо первый блок формирования относительных координат, первый блок алгебраического суммирования, первый блок формирования погрешностей, объединенные в кольцо второй блок формирования относительных координат, второй блок алгебраического суммирования, второй блок формирования погрешностей, а также первый блок приема и передачи данных и второй блок приема и передачи данных, причем на второй и третий входы первого блока формирования относительных координат подключены соответственно другой выход первого датчика координат и углов самолета и первый выход первого блока приема и передачи данных, на второй и третий входы первого блока алгебраического суммирования подключены соответственно выход первого датчика координат цели и второй выход первого блока приема и передачи данных, на первый и второй входы которого подключены соответственно другой выход первого датчика координат и углов самолета и выход первого датчика координат цели, на второй и третий входы второго блока формирования относительных координат подключены соответственно другой выход второго датчика координат и углов самолета и первый выход второго блока приема и передачи данных, на второй и третий входы второго блока алгебраического суммирования подключены соответственно выход второго датчика координат цели и второй выход второго блока приема и передачи данных, на первый и второй входы которого подключены соответственно другой выход второго датчика координат и углов самолета и выход второго датчика координат цели, первый и второй входы первого блока приема и передачи данных подключены соответственно к его третьему и четвертому выходам, подключенным соответственно к третьему и четвертому входам второго блока приема и передачи данных, подключенным соответственно к его первому и второму выходам, первый и второй входы второго блока приема и передачи данных подключены соответственно к его третьему и четвертому выходам, подключенным соответственно к третьему и четвертому входам первого блока приема и передачи данных, подключенных соответственно к его первому и второму выходам.
На чертеже представлена блок-схема предлагаемой системы, где 1 первый датчик координат и углов самолета ДКУС1; 2 первый датчик координат цели ДКЦ1; 3 первый блок формирования относительных координат БФОК1; 4 - алгебраического суммирования БАС1; 5 первый блок формирования погрешностей БФП1; 6 первый блок приема и передачи данных БППД1; 7 второй датчик координат и углов самолета ДКУС2; 8 второй датчик координат цели ДКЦ2; 9 - второй блок формирования относительных координат БФОК2; 10 второй блок алгебраического суммирования; 11 второй блок формирования погрешностей БФП2; 12 второй блок приема и передачи данных БППД2.
Блоки 1 6 установлены на первом самолете, блоки 7 12 установлены на втором самолете.
Система работает следующим образом.
ДКУС1(1) является инерциальным или инерциально-спутниковым датчиком координат местоположения и углов эволюций, формирует и выдает с одного выхода углы эволюций самолета α1i(α11 угол курса, α12 угол крена, α13 угол тангажа), поступающие на один вход ДКЦ1(2). Координаты местоположения в земной системе координат X1i (Х11 продольная координата, X12 - боковая координата, X13 высота) с другого выхода ДКУС1(1) поступают первый вход БППД1(6) и на второй вход БФОК1(3).
ДКЦ1(2) является радиолокационным или оптико-электронным датчиком, в котором по измеряемой дальности от самолета до цели Dц1, углов визирования цели β1, γ1 формируются координаты первого самолета относительно цели в системе координат, реализуемой в ДКУС1(1), Хц1i (Хц11 - относительная продольная координата, Хц12 относительная боковая координата, Хц13 относительное превышение), которые с выхода ДКЦ1(2) поступают на второй вход БППД1(6) и на второй вход БАС1(4). ДКУС2(7) аналогичен по исполнению ДКУС1(1).
C одного выхода ДКУС2(7) сигналы углов эволюций α2i поступают на вход ДКЦ2(8), с другого выхода ДКУС2(7) сигналы координат местоположения X2i поступают на первый вход БППД2(12) и на второй вход БФОК2(9).
В ДКЦ2(8), по исполнению аналогичному ДКЦ1(2), формируются координаты второго самолета относительно той же цели Xц2i, которые с выхода ДКЦ2(8) поступают на второй вход БППД2(12) и на второй вход БФОК2(9).
БППД1(6) является, например, радиотехническим приемо-передатчиком, его первый и второй входы подключены соответственно к третьему и четвертому выходам, откуда сигналы X1i, Xц1i соответственно передаются на третий и четвертый входы БППД2(12), подключенные соответственно к первому и второму его выходам.
БППД2(12) по выполнению аналогичен БППД1(6). Первый и второй входы БППД2(12) подключены соответственно к его третьему и четвертому выходам, откуда сигналы X2i, Хц2i соответственно передаются на третий и четвертый входы БППД1(6), в котором третий и четвертый входы подключены соответственно к первому и второму выходам.
С первого выхода БППД1(6) координаты X2i поступают на третий вход БФОК1(3), на первый вход которого подключен корректирующий сигнал Δ1i с выхода БФР1(5). Со второго выхода БППД1(6) относительные координаты Хц2i поступают на третий вход БАС1(4), на первый вход которого с выхода БФОК1(3) поступают откорректированные координаты x
При этом  ,
,
здесь  точные значения координат местоположения; погрешности определения координат f1i, f2i датчиков ДКУС1(1), ДКУС2(7)
точные значения координат местоположения; погрешности определения координат f1i, f2i датчиков ДКУС1(1), ДКУС2(7)
f1i=a01+a1i+a2it2+. anitn,
f2i=b0i+b1i+b2it2+. bnitn,
f12i=f1i-f2i+(a0i-b0i)+(a1i-b1i)t+.+ +(ani-bni)tn= C0i+C1it+.+Cnitn.
здесь a, b, c постоянные величины, t время.
Тогда  ,
,
(здесь  точные значения относительных координат, f12i - погрешность относительных координат).
точные значения относительных координат, f12i - погрешность относительных координат).
Откорректированные относительные координаты  с входа БФОК1(3) поступают на первый вход БАС1(4), где формируются
с входа БФОК1(3) поступают на первый вход БАС1(4), где формируются
y1i= xц1i+ xц2i- x
Здесь 
при этом  высокочастотная центрированная ошибка, тогда
высокочастотная центрированная ошибка, тогда
с выхода БАС1(4), поступающий на вход БФП1(5). БФП1(5) является корректирующим линейным фильтром, реализующим передаточную функцию
(здесь р оператор дифференцирования, m n +1), на выходе ВФП1(5) будет корректирующая поправка
соответственно при r Ao + + Am-1Pm-1,
где постоянные коэффициенты A обеспечивают устойчивость, качество переходных процессов и подавление высокочастотных погрешностей  .
.
Соответственно на выходе БФОК1(3) будут откорректированные относительные координаты
откуда следует, что при m+n= 1,  , высокочастотная составляющая
, высокочастотная составляющая  проходя через фильтр, подавляется до любого близкого к нулю уровня, тогда соответственно
проходя через фильтр, подавляется до любого близкого к нулю уровня, тогда соответственно  , т.е. откорректированные относительные координаты x
, т.е. откорректированные относительные координаты x Координаты x
Координаты x
По аналогии с первым самолетом на втором самолете первый выход БППД2(12) подключен к третьему входу БФОК2(9), на третий вход которого подключен выход БФП2(11) Δ2i. Второй выход БППД2(12) подключен к третьему входу БАС2(10), на первый вход которого с выхода БФОК2(9) поступает сигнал откорректированных координат 
где  точное значение относительно координат,
точное значение относительно координат,
f21i=f12i,  .
.
В БАС2(10) формируется при 

поступающий на вход БФП2(11), где по аналогии с БФП1(3) формируется сигнал
соответственно на выходе БФОК2(9) будет
откуда следует, что высокочастотная составляющая  подавляется до любого близкого к нулю уровня, а при m+n=1
подавляется до любого близкого к нулю уровня, а при m+n=1  , соответственно
, соответственно  т.е. формируются относительные координаты x
т.е. формируются относительные координаты x ; координаты x
; координаты x
Таким образом достигается информационное обеспечение группового самолетовождения, что свидетельствует о расширении функциональных возможностей системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1995 |
|
RU2079109C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2147009C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2089450C1 |
Использование: в авиационном приборостроении, в частности в системах, обеспечивающих формирование относительных координат. Сущность изобретения: в информационную систему, формирующую относительные координаты относительно цели на борту каждого взаимодействующего самолета, дополнительно вводятся блок формирования относительных координат, блок алгебраического суммирования, блок приема и передачи данных и блок формирования погрешностей, являющийся линейным фильтром, выделяющим сигнал относительных погрешностей датчиков координат и углов самолетов. После окончания переходных процессов формируются точные относительные координаты взаимодействующих самолетов, передаваемые потребителям для обеспечения управления и пилотирования в групповом самолетовождении. 1 ил.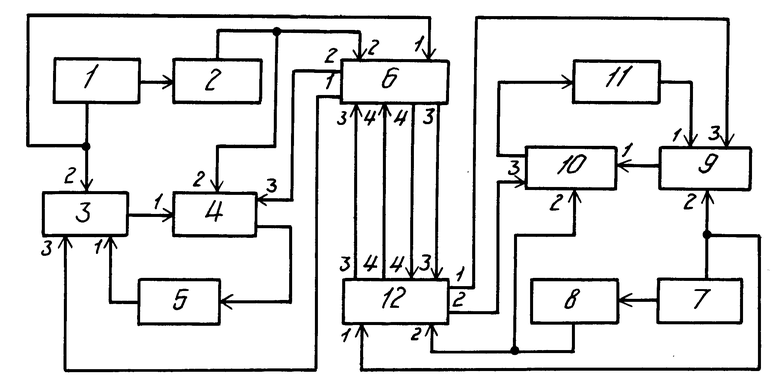
Информационная система группового самолетовождения, содержащая последовательно соединенные первый датчик координат и углов самолета и первый датчик координат цели, последовательно соединенные второй датчик координат и углов самолета и второй датчик координат цели, отличающаяся тем, что дополнительно введены последовательно соединенные первый блок формирования относительных координат, первый блок алгебраического суммирования и первый блок формирования погрешностей, последовательно соединенные второй блок формирования относительных координат, второй блок алгебраического суммирования и второй блок формирования погрешностей, а также первый и второй блоки приема и передачи данных, в каждом из которых первый и второй входы соединены соответственно с третьим и четвертым выходами, а третий и четвертый входы с первым и вторым выходами, третий и четвертый выходы первого блока приема и передачи данных соединены соответственно с третьим и четвертым входами второго блока приема и передачи данных, третий и четвертый выходы которого соединены с третьим и четвертым входами первого блока приема и передачи данных, первый вход первого блока приема и передачи данных соединен с вторым выходом первого датчика координат и углов самолета и с вторым входом первого блока формирования относительных координат, первый вход которого соединен с выходом первого блока формирования погрешностей, а третий вход с первым выходом первого блока приема и передачи данных, второй вход первого блока приема и передачи данных соединен с выходом первого датчика координат цели и вторым входом первого блока алгебраического суммирования, третий вход которого соединен с вторым выходом первого блока приема и передачи данных, первый вход второго блока приема и передачи данных соединен с вторым выходом второго датчика координат и углов самолета и вторым входом второго блока формирования относительных координат, первый вход которого соединен с выходом второго блока формирования погрешностей, а третий вход с первым выходом второго блока приема и передачи данных, второй вход второго блока приема и передачи данных соединен с выходом второго датчика координат цели и вторым входом второго блока алгебраического суммирования, третий вход которого соединен с вторым выходом второго блока приема и передачи данных, при этом выходы первого и второго блоков формирования относительных координат являются выходами информационной системы.
| Разработка и исследование унифицированных алгоритмо обработки навигационной и радиолокационной информации | |||
| НИР "Сибарит", АО РПКБ, 1995. |
