Изобретение относится к сельскому хозяйству, а конкретнее к способу и устройству управления мобильным агрегатом, и может быть использовано в качестве подвески гусеничного движителя и принципа исследования технологий и местности.
Известен способ управления движением агрегата и оценки его работы, предусматривающий получение и использование информации о силах и о взаимодействии движителя и опорной поверхности (1).
Недостатком известного объекта является трудность совмещения функций датчика, регулятора, гусеничного движителя, подвески и эластичного привода.
Целью изобретения является облегчение управления и работы, повышение эффективности движения, стабилизация нагрузки, распознавание внешних условий для управления без запаздывания. Другие цели рассмотрены в описании.
Поставленная цель достигается тем, что ходовую часть используют в качестве датчика и регулятора силы тяги. Сравнивают силы тяги и тяжести, их отношение используют для оценки и управления. Пропорционально силе тяги перемещают движитель и такое перемещение используют в качестве параметра оценки регулирования и повышения эластичности привода.
Раму используют в качестве грузового аккумулятора и средства повышения эластичности привода.
Изменение высоты используют в качестве параметра регулирования и стабилизации силы тяги.
Рама подвешена к движителям с возможностью подъема и продольного перемещения пропорционально внешним силам.
Рама снабжена датчиком коэффициента тяги, при этом датчик совмещен с регулятором силы тяги.
Основой изобретения является обобщение, совмещение, согласование и обратимость функций элементов распознавания внешних условий и упреждение действий датчика-регулятора и ходовой части.
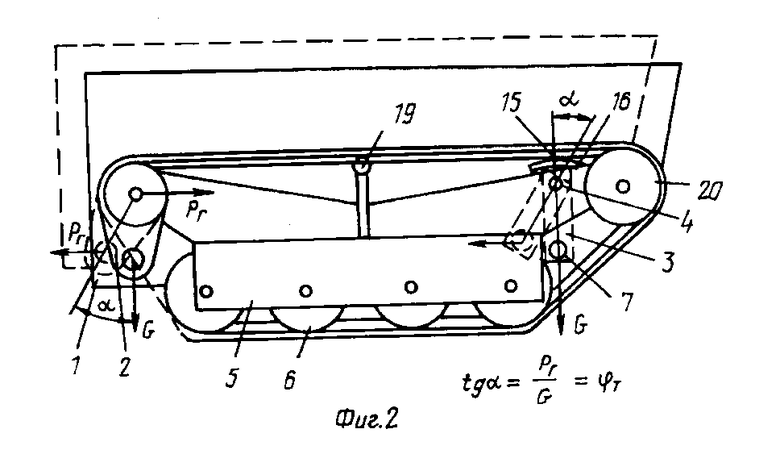
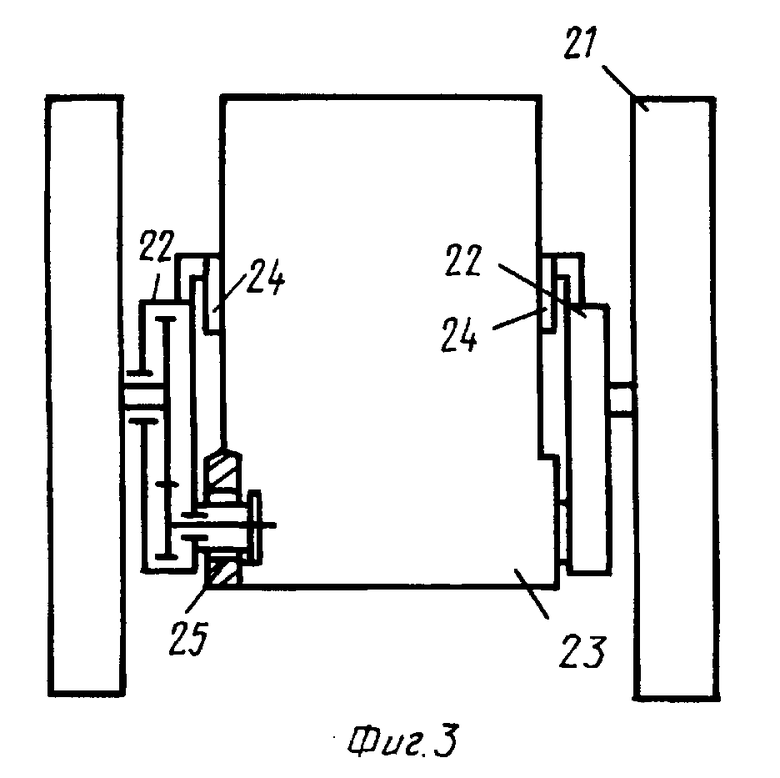
В графической части изобретения на фиг. 1 изображена схема датчика-регулятора-подвески гусеничного движителя, вид сзади; на фиг. 2 - схема движителя-датчика-регулятора, вид сбоку, с указанием угла α поворота тяги-звена подвески под действием горизонтальных Pг и вертикальных G сил; на фиг. 3 подвеска колеса.
Подвеска гусеничного движителя содержит раму 1 (фиг. 1) на поворотных редукторах 2 и тягах 3 шарнирной связи с тележками 5 катков 6; шарниры 7 и 8 тяги и редукторов с валом 9 и шестернями 10, II привода вала 12 ведущей звездочки 13 гусеницы 14 с движком 15 и датчиком 16 угла поворота тяги или движком 17 и датчиком 18 угла поворота редуктора; поддерживающие ролики 19 и натяжные колеса 20.
Рама 1 может перемещаться в пределах поворота редукторов 2 и тяг 3 до уравновешивания действий сил горизонтальных и вертикальных, а датчики 16, 18 могут дать информацию об изменении коэффициента тяги. Возможно применение упругих элементов и амортизаторов для снижения колебаний.
Пунктиром изображена работа датчика-регулятора нагрузки, vт - коэффициент тяги tgα где a характеризует угол поворота тяги и движка датчика под действием горизонтальных сил Pг и тяжести G.
Устройство для исследования взаимодействия с опорной поверхностью колесного движителя содержит колесо 21 (фиг. 3), к шарнирной оси которого тягой 22 и шарниром подвешена рама 23, на которой установлен датчик 24. Тяги 22 или бортовой редуктор, шарнир 25 соединяют колесо 21 с рамой 23. На одной из тяг или редукторе установлен датчик, измеряющий угол его поворота относительно рамы.
Устройство работает следующим образом.
Горизонтальные силы, приложенные к колесам, в зависимости от режима работы (ведущий тормозной) стремятся повернуть тягу вперед или назад, а вертикальные силы вернуть и удержать их в вертикальном положении. При отсутствии горизонтальной силы тяги 4 бортовые редукторы под действием силы тяжести устанавливаются в вертикальном положении. При этом угол поворота тяг и сигнал равны нулю. При работе тяги и редуктор поворачиваются силой тяги, и датчик выдает сигнал о коэффициенте тяги. При буксировке сигнал пропорционален коэффициенту сопротивления качению. Поскольку коэффициенты тяги и сопротивления качению изменяются, датчик выдает сигнал в виде безразмерного коэффициента, который можно регистрировать и использовать для управления.
Поворотное звено подвески влияет на эластичность привода и плавность хода. Так, при встрече движителя с бугорком, он под действием горизонтальной силы удара замедляет ход при неизменной скорости рамы и смягчает удар, а после наезда на выступ ускоряет ход. Этот ход делает раму грузовым аккумулятором и обеспечивает обратимость энергии колебания путем преобразования потенциальной энергии в кинетическую и обратно. Запас потенциальной энергии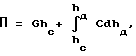
где
G сила тяжести подрессоренной части;
hд динамический ход подвески;
hс статический ход подвески;
C жесткость подвески.
Всякое преобразование кинетической энергии в потенциальную способствует выполнению рамой функций грузового аккумулятора, утилизации энергии колебаний рамы и гашению колебаний нагрузки на крюке повышению эластичности привода, саморегулированию высоты рамы и навесных орудий в соответствии с изменением их сопротивления.
Таким образом, движители копируют опорную поверхность и дают сигнал о взаимодействии с опорной поверхностью в готовом, удобном для визуального наблюдения и фиксации регистрирующей аппаратурой виде. Относительное продольно-вертикальное перемещение рамы и движителей способствует смягчению ударов о неровности, повышению эластичности привода. Некоторое вертикальное перемещение рамы силой тяги дает эффект силового регулирования высоты навесных машин и подобно грузовому аккумулятору частично утилизирует энергию колебаний. Кроме того, подвески тракторов на колесном и гусеничном ходу можно унифицировать и использовать для оперативной оценки изменения взаимодействия движителей с почвой и получения информации о безразмерных коэффициентах тяги Φт.
Источники информации
Авторское свидетельство СССР N 965868, кл. B 62 D 55/10, 1982.
Применение: сельскохозяйственное машиностроение, в частности способы и устройства для автоматического управления мобильными агрегатами.
Сущность: способ заключается в накоплении потенциальной энергии и ее расходе путем изменения положения рамы энергетического средства. В процессе перемещения агрегата определяют силу тяги, сравнивают ее с определяемой по высоте положения рамы ее потенциальной энергией и по результатам сравнения изменяют скорость движения агрегата. Устройство содержит раму и соединенные с ней посредством шарнирных параллелограммов движители. Одно из звеньев шарнирного параллелограмма выполнено в виде тяги, а другое - в виде редуктора, вал которого шарнирно закреплен на раме. Ведущая звездочка гусеничного движителя шарнирно соединена с одной из шестерней привода вала редуктора. Ведущая звездочка одного гусеничного движителя имеет движок и датчик угла поворота тяги. Ведущая звездочка другого движителя - движок и датчик угла поворота редуктора. Каждый движитель имеет поддерживающий ролик и натяжное колесо. 2 с. п. ф-лы, 3 ил.
| Подвеска гусеничной машины | 1981 |
|
SU965868A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
