Изобретение относится к сельскому хозяйству, в частности к способу управления движением агроробота, и может быть использовано для оптимизации управления тракторным агрегатом, оценки машин и местности при реальной работе.
Целью изобретения является повышение эффективности управления агророботом, колеса которого установлены с возможностью перемещения относительно его рамы
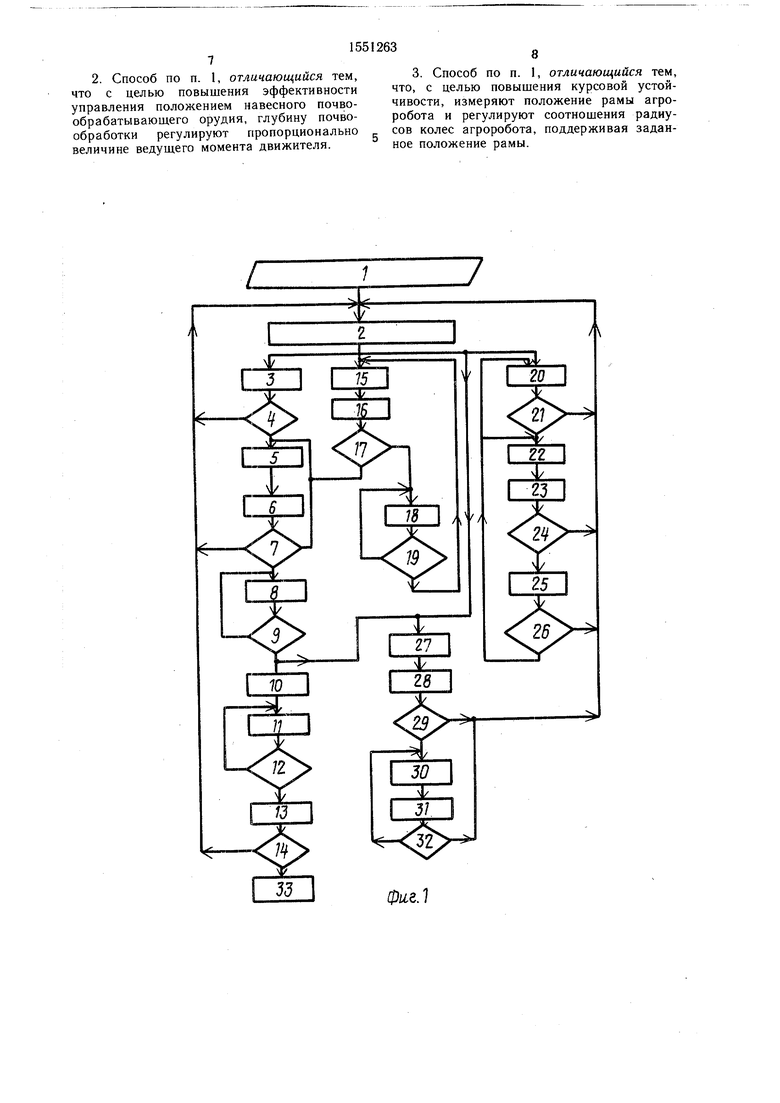
На фиг 1 изображена блок-схема способа управления в виде фрагмента работы
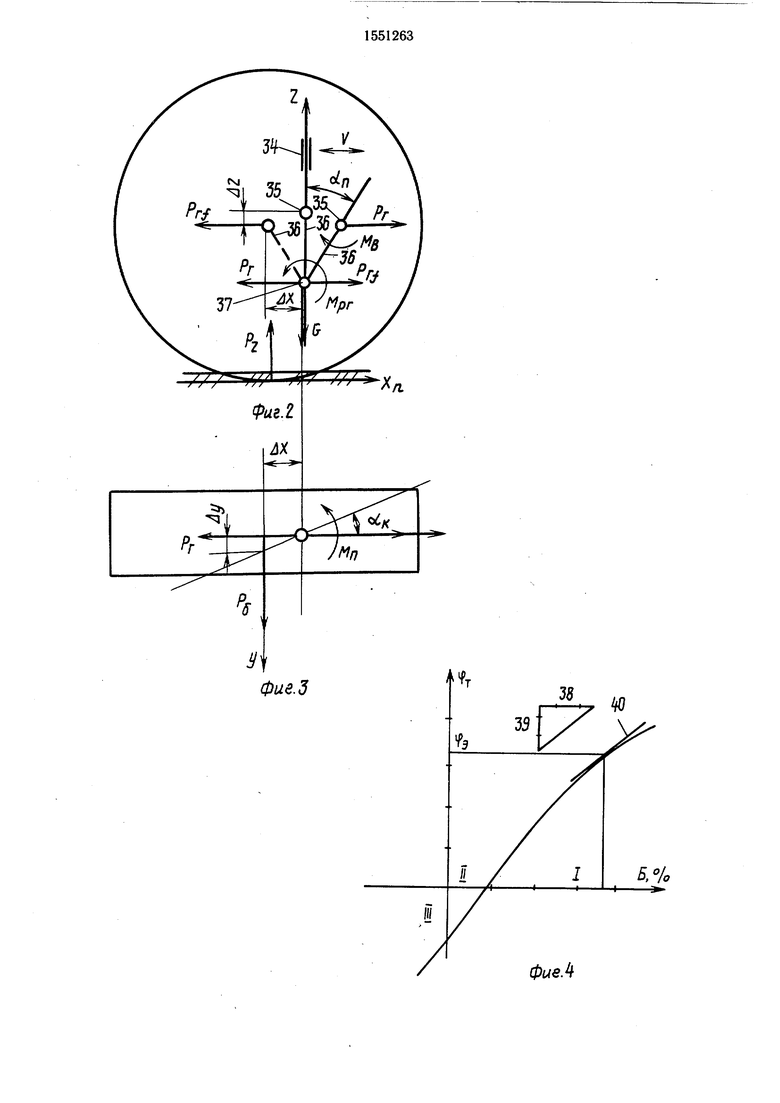
путем слежения движителями за условиями функционирования; на фиг 2 - схема получения информации от движителей в виде углов а а„, а поворота вокруг координатных осей Х Y Z и перемещений Х, ДУ, AZ под действием реакций почвы Х„, Prt , Рг , Рь, Рг 5 и моментов Mfr,WuM при любом нагружении силой тяжести G; на фиг. 3 - то же, вид сверху; на фиг. 4 - способ графического определения коэффициента эффективности
30со слежением за скоростью поворота
31для формирования сигнала 32 о нормальной работе или о продолжении управления до окончания поворотов и проходов и остановки 33 в конце поля.
Информацию для управления получают от движителя, вертикальная ось 34 которого соединена с осью 35 вращения подвеской 36, качающейся вокруг шарнира 37 рамы. Оперативную информацию о взаимотяги cf по коэффициенту тяги срг и буксова- ю действии агроробота с местностью можно нию Б; на фиг. 5 - графическая интерпре- получить в виде углов поворота привода тация закономерности изменения показа- с эластичным звеном, подвески ал и колеса телей движителя и подвески при движении а« вокруг координатных осей X,Y,Z и пере- вперед и назад (Gtgan - жесткость, ш, тг- мещении ДА, АУ, AZ по осям под действием соответственно модули вертикальной и го- реакций почвосреды Хп, Рг;, Рг, Ре, PZ и мо- ризонтальной жесткости взаимодействия с ментов Mpr, М, Мп при любом нагружении почвой); на фиг. 6 - блок-схема алгоритма силой тяжести. Графическая зависимость вычисления коэффициента эффективности коэффициента тяги срт от буксования Б тяги и определения режима перегрузки (фиг. 4) поясняет процесс определения ко- или нормального функционирования; на эффициента эффективности тяги срэ-Парал- фиг. 7 - конструктивная схема средства 20 лельно гипотенузе треугольника, катеты для реализации способа управления в наи- 38 и 39 которого содержат одинаковое
число единиц коэффициента тяги и буксования и параллельны осям координат рг, Б, проводят касательную 40 к линии зависимости коэффициента тяги от буксования. Ор- 25 дината точки касания линий равна коэффициенту эффективности тяги, а абсцисса допустимому буксованию.
На графической интерпретации (фиг. 5) изменения параметров подвески горизон- длины гона, числа проходов в гоне (отно- „п тальные перемещения сил движителя отношения ширины гона к захвату), движение сительно рамы при движении вперед 41 путем слежения 2 за углом поворота дат- и назад 41, модули вертикальной жест- чика 3 нагрузки для сравнения с целевым кости 42 и 42, вертикальные перемещения значением в блоке 4 определения тягового, 43 и 43, модули горизонтальной жест- нейтрального и тормозного режимов при кости 44 и 44, жесткость подвески Gtga,n 45, управлении двигателем, трансмиссией и тор- - 45, угол поворота звена подвески а„ 46, мозами 5 для регулирования скорости 6, срав- 46 в зависимости от горизонтальной силы нения ее с целевой 7 при движении до конца Рг дают информацию для управления агро- гона 8, начало 9 включения поворота 10 роботом с учетом взаимодействия движи- на желаемый угол 11 до достижения целе- теля с почвой и составляют основу алго- вого угла 12 и продолжения таких про- ритма управления при формировании тра- ходов 13 до установленного числа 14, одно- 40 ектории и режима работы, временно слежение за углом поворотаАлгоритм расчета коэффициента тяги
подвески 15 для установления коэффици- (фиг. 6) включает ввод сигналов 47 об ента тяги 16 и сравнения с эффективным изменении коэффициента тяги и буксования, коэффициентом тяги 17 для управления вычисление эффективного коэффициента орудиями и силой тяги 18 на крюке до тяги путем деления первого на второе срэ
гбпижрния ЧНЯЧРНИЙ кГ1Ч ЪЛипирнтг п 1Q п ПР. ro,/R 48. ГПЯИНРНИР TPKVTiiPrn чияирииа
более экономичном режиме движения поперек склона снижением поворота колес регулированием соотношения радиусов качения и скоростей бортов (Р - угол склона; AZ - разность радиусов качения).
Способ управления движением агроробота включает ввод в блок 1 целевых значений углов поворота датчика нагрузки, звена подвески, колеса, радиуса поворота,
сближения значений коэффициентов 19 в период всей работы Слежение за курсом 20, отклонением его от целевого значения
21для регулирования разности скоростей
22до устранения сигнала 23 и достижения целевого курса 24, слежение за линейным gQ отклонением 25 для выработки сигнала 26 управления при формировании траектории обеспечиваются непрерывно до остановки. Одновременно обеспечивается согласование
/Б 48, сравнение текущего значения коэффициента тяги с эффективным коэффициентом тяги 49 и формирование сигналов о нормальной работе 50 и перегрузке 51.
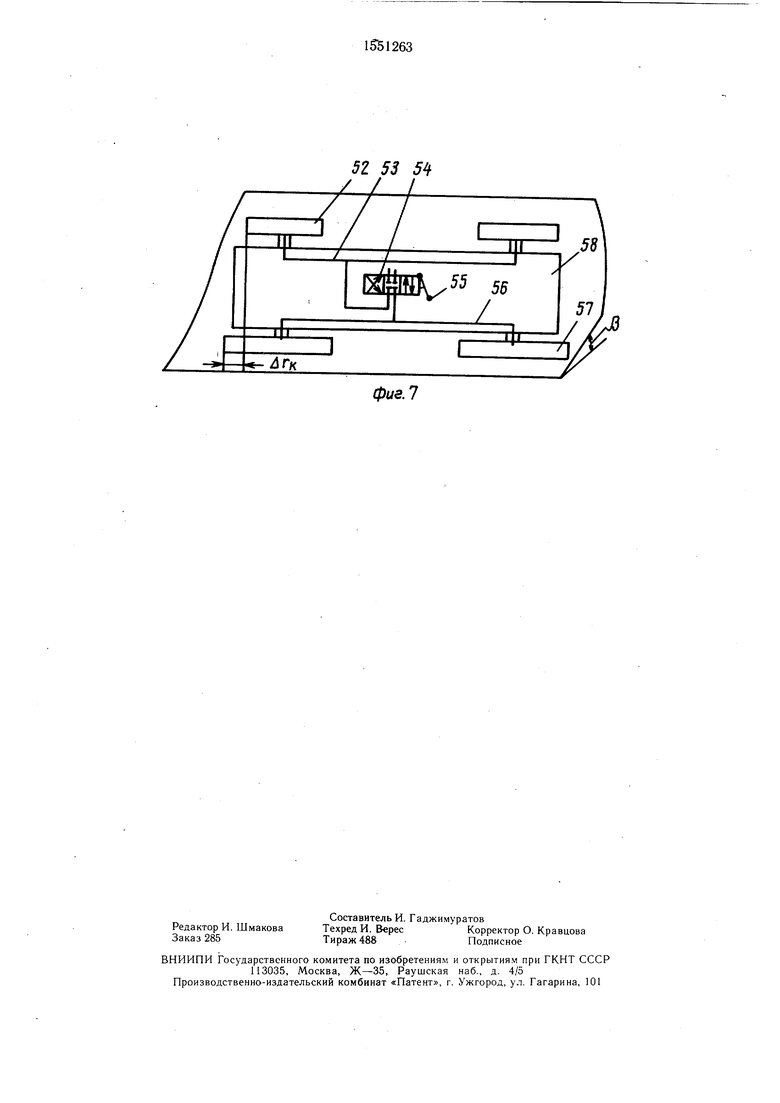
Регулирование разности скоростей осуществляется регулированием разности диаметров радиусов качения колес бортов автономными системами, как это показано на фиг. 7, где колесо 52, трубопровод 53, распределитель 54 с органом 55 управления,
работы рулевого колеса и скорости с радиусом поворота 27 в зависимости от ши- 55трубопровод 56 к колесу 57 второго борта рины захвата или колеи 28 для формиро-и известная арматура на раме 58 совместно вания сигнала о нормальном функциони-регулируют разность радиусов качения ровании или управлении потоком мощ-колес AZ и скоростей бортов, компенси- ности 29, коробкой скоростей и тормозомруют влияние склона и увод от курса при
30со слежением за скоростью поворота
31для формирования сигнала 32 о нормальной работе или о продолжении управления до окончания поворотов и проходов и остановки 33 в конце поля.
Информацию для управления получают от движителя, вертикальная ось 34 которого соединена с осью 35 вращения подвеской 36, качающейся вокруг шарнира 37 рамы. Оперативную информацию о взаимо(фиг. 6) включает ввод сигналов 47 об изменении коэффициента тяги и буксования, вычисление эффективного коэффициента тяги путем деления первого на второе срэ
ro,/R 48. ГПЯИНРНИР TPKVTiiPrn чияирииа
/Б 48, сравнение текущего значения коэффициента тяги с эффективным коэффициентом тяги 49 и формирование сигналов о нормальной работе 50 и перегрузке 51.
Регулирование разности скоростей осуществляется регулированием разности диаметров радиусов качения колес бортов автономными системами, как это показано на фиг. 7, где колесо 52, трубопровод 53, распределитель 54 с органом 55 управления,
трубопровод 56 к колесу 57 второго борта и известная арматура на раме 58 совместно регулируют разность радиусов качения колес AZ и скоростей бортов, компенси- руют влияние склона и увод от курса при
одинаковых скоростях независимо от рулевого управления.
Способ управления агророботом реализуется формированием курса, режима нагрузки, поворотом в конце гена, путем учета взаимодействия движителя с почвой и перемещений движителя в пространстве относительно рамы пропорционально внешним влияниям. Информация о взаимодействии с почвой характеризует условия работы: горизонтальные силы отклоняют редуктор или звено подвески на угол ап, а вертикальные силы, включая силу тяжести G, возвращают его в исходное положение, причем устойчивое положение всегда хафиксации фиксирующей аппаратурой используют для обоснования показателей работы, норм расхода энергии (топлива), энергоемкости процесса, оплаты труда и материалов, паспортизации полей, оценки
совершенства рабочих органов и движителей, испытания техники при реальной работе в поле и решения вопросов прогнозирования проходимости при использовании известных средств обработки информации.
10 Перемещения движителя зависят от длины звена подвески 36
AZ--/(1-cosotn); &X lsinan; &Y &Xtga -, Регулированием разности радиусов каче рактеризуется тождественным равенством 15 ния движителей обеспечивается прямоли- тангенса угла отношению сил горизонталь- нейное движение поперек склона без пово- ных к вертикальным. Датчик угла поворотарота направляющих колес в сторону склона
такого звена подвески выдает сигнал ои без создания дополнительного сопротиввзаимодействии движителя с почвой. Ра-ления движению, которое пропорционально
боту такой подвески при движении в тяго-повороту колес. Закономерная связь развом и тормозном режимах можно описать 20 ности радиусов качения движителей с шири- тождестваминой колеи и углом крутизны склона характеризуется равенством
,
где т,0 - касательные и нормальные напря- 25 жения почвы в контакте с почвой;
/ - продольно-горизонтальные ускорения рамы;
g - ускорение свободного падения.
Изменение отношения горизонтальной
AZ j|tep(Vi-У2)/-2я; ,14,
где В - ширина колеи;
Р - угол склона; V, - скорости бортов,
t - время.
Реализация предлагаемого способа упреакции почвы к силе тяжести в виде танген- 30 равления обеспечивает снижение влияния
фиксации фиксирующей аппаратурой используют для обоснования показателей работы, норм расхода энергии (топлива), энергоемкости процесса, оплаты труда и материалов, паспортизации полей, оценки
совершенства рабочих органов и движителей, испытания техники при реальной работе в поле и решения вопросов прогнозирования проходимости при использовании известных средств обработки информации.
Перемещения движителя зависят от длины звена подвески 36
AZ j|tep(Vi-У2)/-2я; ,14,
где В - ширина колеи;
Р - угол склона; V, - скорости бортов,
t - время.
Реализация предлагаемого способа 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Способ управления агрегатом при работе на склонах | 1988 |
|
SU1782373A1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |

Изобретение относится к сельскому хозяйству, в частности к способу управления движением агроробота, и может быть использовано для оптимизации управления тракторным агрегатом, оценки машин и местности при реальной работе. Цель изобретения - повышение эффективности управления агророботом, колеса которого установлены с возможностью перемещения относительно его рамы. Для этого регистрируют изменение координат оси колеса относительно рамы агроробота под действием внешних сил и угловое рассогласование между курсовым направлением движения агроробота и плоскостью колеса, определяют коэффициент эффективности тяги, по величине которого корректируют значение ведущего момента движителя и глубину почвообработки рабочим орудием, измеряют положение рамы агроробота и регулируют соотношение радиусов колес, поддерживая положение рамы при малом повороте колес. Повышение скорости нижнего борта без торможения верхнего до разблокирования дифференциала на склоне выгодно осуществлять регулированием радиусов качения в период поворота и угловых скоростей. Регулирование радиусов качения движителей правого и левого бортов до изменения угловых скоростей их приводами до нулевого угла поворота направляющих колес снижает сопротивление движению и потери энергии на обслуживание усилителя механизма поворота. Получение и использование информации о взаимодействии движителя и почвы для оптимизации режимов работы и повышение эффективности формирования траектории достигаются совмещением функций подвески, стабилизатора нагрузки, ограничителя напряжений почвы, силового регулятора, утилизатора энергии колебания рамы, средства оценки реальной работы и датчика информации для оптимизации режима работы. Перемещения движителя относительно рамы силой тяги обеспечивают эластичность при вода и сглаживание колебаний нагрузки, а силой тяжести - утилизацию энергии колебания рамы и силовое регулирование положения навесного орудия. Выравнивание нагрузок и буксований, изменение радиусов качения движителей для снижения угла поворота колес, сопротивления движению и потерь энергии на регулирование разности частот вращения движителей облегчает регулирование скоростей бортов и деление потока энергии между движителями с учетом реакций почвы и курса. 2 з.п.ф-лы, 7 ил.
са угла поворота звена подвески характеризует коэффициент тяги . Изменение сил тяги в пределах Рг, Рл на пути S уравновешивается работой сил тяжести:
Ч (Рм-P,2) sina.na,an,
Ащ
где ая|, аП2 - пределы изменения угла поворота звена подвески. Вертикальные перемещения AZ рамы относительно движителя обеспечивают высотное регулировакрутизны склона на поворот направляющих колес и сопротивление движению, повышение курсовой устойчивости на склоне и экономичности формирования траектории и режимов работы, а информация 35 движителя облегчает оценку и использование техники.
Формула изобретения 1. Способ управления движением агро г..,....гробота, включающий измерение и миниминие навесного орудия (плуга, бульдозера) 40 зацию отклонений траектории движения по нагрузке. Это исключает из цепи управ-агроробота от курса и базовой линии в
ления навесными орудиями датчики и уси- гоне, скорости движения агроробота, веду- лительно-исполнительные элементы.Щи моментов и опорных реакций движиПродольное перемещение движителя телей и последующее регулирование ско- относительно вертикальной оси 34 повышает 45 рости движения агроробота, ведущих моментов и опорных реакций движителей, а также стабилизацию опорных реакций, отличающийся тем, что, с целью повышения эффективности управления агророботом, колеса которого установлены с возможнос- теля, смягчая удар о неровности, накап- 50 тью перемещения относительно его ра- ливают энергию, поднимая раму при повы- мы регистрируют изменение координат шении нагрузки, стабилизируют нагрузочный оси одного из этих колес относительно режим. Фиксацией информации в виде ко-рамы агроробота под действием внешних
эффициента тяги обеспечивают оценку уело- сил и угловое рассогласование между кур- вий местности, а в виде коэффициента совым направлением движения агроробота эффективности тяги - оценку эффектов- 55 и -плоскостью колеса, определяют коэффи- ности движения и работы в период вы-циент эффективности тяги, по величине кополнения технологического процесса. По-торого корректируют величину ведущего
этому текущее значение этих показате-момента движителя и глубину почвообралей по показанию приборов или после ботки рабочим орудием.
его чувствительность к изменению курса и в виде угла поворота колеса вводится в усилитель руля для поворота до устранения сигнала и возвращения к целевой траектории, продольные перемещения движикрутизны склона на поворот направляющих колес и сопротивление движению, повышение курсовой устойчивости на склоне и экономичности формирования траектории и режимов работы, а информация движителя облегчает оценку и использование техники.
фиг.1
Л
фиг.З
30
33
W
фиеЛ
Фиг. 5
50
фие.6
52 53 54
/ / I
Ж
У
i шау5 56
JLB
фиг. 7
| Устройство для закалки бичей на барабане | 1959 |
|
SU139334A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
