Изобретение относится к общему машиностроению, к устройствам, обеспечивающим реверсивный шаговый поворот с остановками (например, для барабанов) или шаговое перемещение с остановками (например, для конвейеров).
Известно устройство для преобразования вращательного движения в осциллирующее, содержащее ведущий вал с маховиками, приводной вал, взаимодействующий с рычагами, шарнирно связанными с ведомым звеном [1]
Недостатком этого устройства является непригодность использования его в устройствах шагового перемещения с остановками.
Наиболее близким по своей технической сущности является механизм прерывистого движения, содержащий корпус, размещенный в нем кривошипный механизм, включающий два кинематически связанные между собой кривошипа, установленные с возможностью взаимодействия с роликами ведомого звена [2]
Недостатком указанного устройства является сложность конструкции, обусловленная наличием рычажного механизма из трех рычагов, один из которых необходимо выполнять регулируемым по длине и шарнирно связать с ползуном-фиксатором, установленным в пазу, выполненном в корпусе. Это снижает технологичность изготовления устройства в целом.
Технической задачей изобретения является упрощение конструкции, повышение технологичности.
Поставленная задача решается тем, что в механизме прерывистого движения, содержащем корпус, размещенный в нем кривошипный механизм, включающий два кинематически связанных между собой кривошипа, установленные с возможностью взаимодействия с роликами ведомого звена, механизм снабжен двумя кулисами, имеющими пазы, предназначенные для взаимодействия с роликами ведомого звена, и шарнирно связанными с плечами соответствующих кривошипов с образованием параллелограммного механизма, кинематическая связь соединенного с приводом ведущего кривошипа с ведомым кривошипом выполнена в виде серьги или зубчатой передачи.
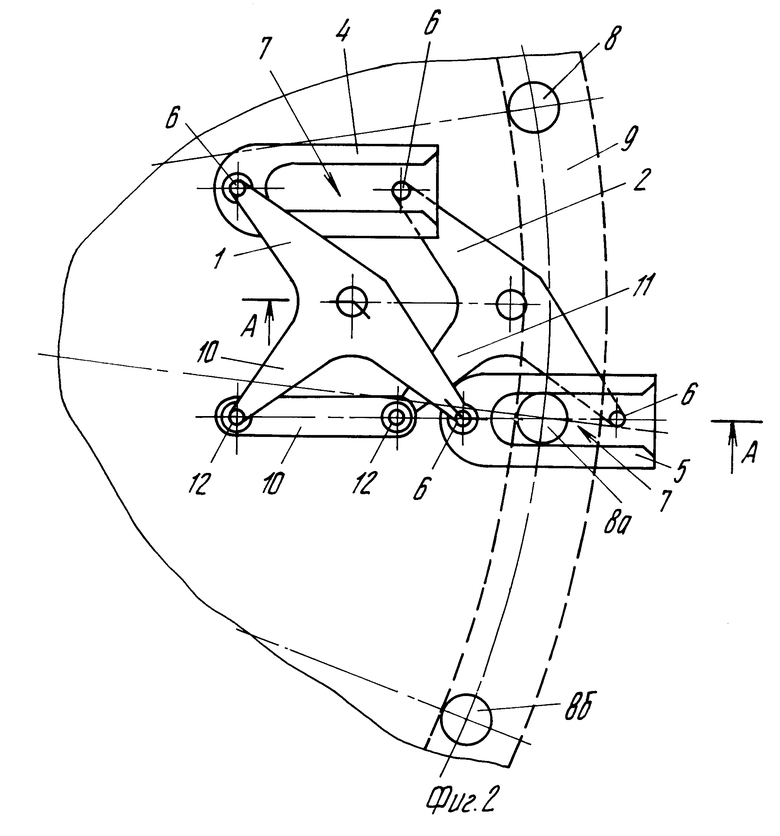
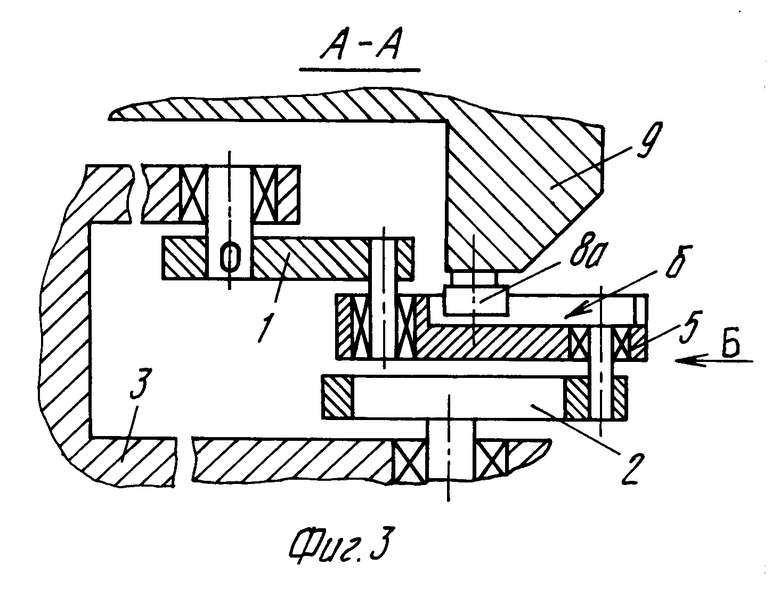
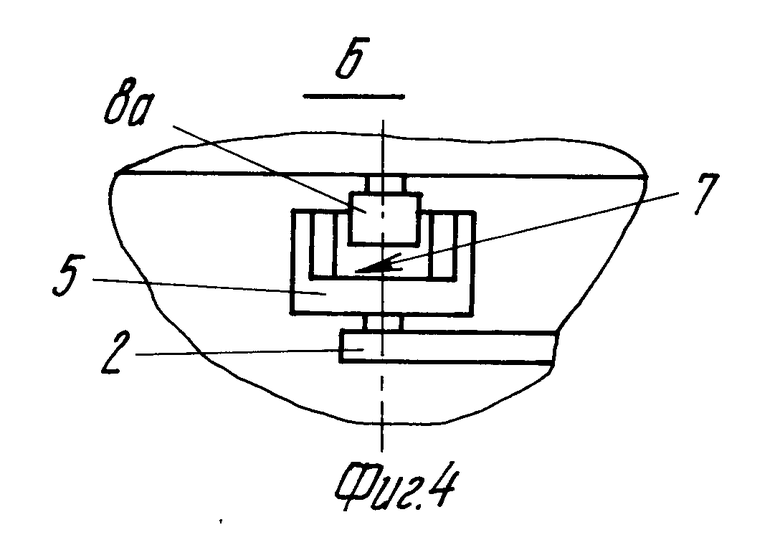
На фиг. 1 представлена кинематическая схема устройства; на фиг. 2 общий вид механизма; на фиг. 3 сечение А-А по фиг. 2; на фиг. 4 вид по стрелке Б по фиг. 3.
Механизм прерывистого движения содержит кривошипы 1 и 2, кинематически связанные между собой, жестко закрепленные на валах, параллельно установленных в корпусе 3, причем один из кривошипов кинематически связан с приводом (не показано) и является ведущим. Механизм содержит кулисы 4 и 5, имеющие пазы 7 и связанные с плечами кривошипов 1,2 при помощи шарниров 6 и с образованием параллелограммного механизма. Пазы 7 предназначены для установки в них роликов 8, ведомого звена 9. В примере конкретного исполнения ведомое звено выполнено в виде диска, связанного с барабаном (не показано). В данном примере кинематическая связь кривошипов выполнена в виде серьги 10, связанной с выступами 11 на кривошипах при помощи шарниров 12.
В другом примере конкретного исполнения для обеспечения перемещения с остановками конвейера кинематическую связь кривошипов конструктивно удобнее выполнять в виде известной зубчатой передачи, кинематически связывающей валы кривошипов (не показано). В этом случае серьга и выступы на кривошипах не нужны.
Механизм прерывистого движения работает следующим образом.
При включении привода начинает вращаться связанный с ним кривошип (например, кривошип 1), причем вращение передается через серьгу 10 кривошипу 2. Предположим, что вращение происходит против часовой стрелки (см. фиг. 1 - исходное положение). При синхронном повороте кривошипов 1,2 ролик 8 ведомого звена (в виде диска) 9 выходит из паза кулисы 4, а ролик 8а перемещается вдоль паза кулисы 5 влево, при этом ведомое звено 9 (в виде диска) также начинает поворачиваться против часовой стрелки. При дальнейшем вращении кривошипов ролик 8а достигает точки возврата, которое соответствует "мертвому" состоянию механизма (когда параллелограмм превращается в отрезок), после ролик начинает перемещаться вправо. При повороте кривошипов на угол 180o ведомое звено 9 совершает поворот на угол λ (см. фиг. 1). При этом ролик 8а занимает положение ролика 8, а на место ролика 8а приходит ролик 8б.
При дальнейшей работе механизма цикл повторяется. Таким образом, при повороте ведущего вала на 360o ведомое звено 9 в виде диска поворачивается на угол 22. При этом вращение диска происходит с переменной скоростью, мгновенное значение которой определяется геометрией конкретной конструкции механизма, причем когда ролик достигает точки возврата, скорость вращения диска становится наибольшей. При использовании предлагаемого механизма в конвейерах прямолинейного перемещения с мгновенными остановками ролики конвейера размещают в ряд, при этом за один оборот механизма конвейер перемещается на двойное расстояние между осями роликов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-КУЛИСНЫЙ КЛИНОВОЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2001 |
|
RU2228266C2 |
| УСТРОЙСТВО ПРЕРЫВИСТОГО ВРАЩЕНИЯ | 1991 |
|
RU2038996C1 |
| МЕХАНИЗМ ПОДАЧИ И ПОВОРОТА СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1999 |
|
RU2207202C2 |
| ВАЛКОВАЯ (РОЛИКОВАЯ) ПОДАЧА ЗАГОТОВОК В ЗОНУ ОБРАБОТКИ | 1998 |
|
RU2158647C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ВИКЕЛЕЙ | 1992 |
|
RU2021126C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| ДОЗАТОР ДЛЯ ТРУДНОСЫПУЧИХ МАТЕРИАЛОВ | 1992 |
|
RU2054629C1 |
| ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ | 1995 |
|
RU2101530C1 |
| СПОСОБ УСТАНОВКИ И ФИКСИРОВАНИЯ РАБОЧИХ ОРГАНОВ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2000 |
|
RU2191696C2 |
Использование: изобретение относится к общему машиностроению и может быть использовано в устройствах, обеспечивающих реверсивный шаговый поворот с остановками. Сущность изобретения: механизм, отличающийся тем, что он снабжен двумя кулисами 4 и 5, имеющими пазы 7, предназначенными для взаимодействия с роликами 8 ведомого звена 9, и шарнирно связанными с плечами соответствующих кривошипов с образованием параллелограммного механизма. Кинематическая связь кривошипов выполнена в виде серьги 10, или зубчатой передачи. 2 з.п. ф-лы, 4 ил.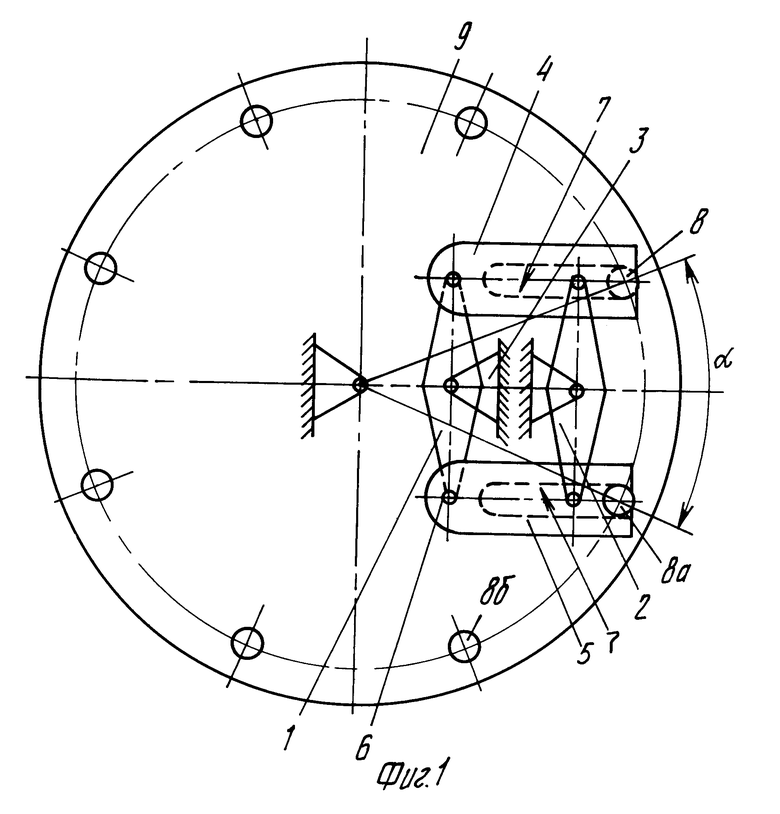
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США N 4891998, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм прерывистого вращения и фиксации ведомого звена | 1985 |
|
SU1260615A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
