Изобретение относится к области решения задачи местоопределения движущихся и неподвижных объектов в пределах большого региона.
Известны многоспутниковые способы и устройства местоопределения и измерения скорости объектов. К их недостаткам относятся, помимо использования большого числа (около ста) спутников, необходимость использования высокостабильных по частоте бортовых генераторов сигналов, внесение поправок в измеренные псевдодальности, учет переменных во времени эфемерид спутников и получение информации о них при решении навигационных задач, использование четырехканальных гигогерцовых приемников и компьютерных измерителей на каждом объекте (пользователе), сложность навигационных алгоритмов (совместное решение уравнений четырех сфер и их производных). Эти недостатки снижают надежность устройства измерителя и повышают его стоимость.
Наиболее близким к заявляемому объекту является способ, описанный в [1]. Он и взят за прототип.
Техническим результатом заявляемого изобретения является устранение отмеченных недостатков, а именно обеспечение высокой степени надежности диспетчерского контроля за движущимися и неподвижными объектами, а также безопасности движения на транспорте.
Сущность заявляемого изобретения состоит в том, что в способе измерения координат и скоростей передатчик диспетчерского пункта излучает запросный радиосигнал в направлении искусственного спутника Земли (ИСЗ) квазигеостационарного типа, этот сигнал ретранслируется его первым приемопередатчиком, приемопередатчиком объекта, вторым приемопередатчиком (ИСЗ) и принимается приемником диспетчерского пункта, на котором также располагаются измерители дальности (координаты) по времени задержки сигнала τ и измеритель радиальной скорости Vp - по доплеровскому сдвигу частоты Fg при известной скорости распространения радиоволн c: f - здесь частота запросного сигнала передатчика диспетчерского пункта. Соответствующие уравнения:
d1=const, поскольку координаты диспетчерского пункта и эфемериды ИСЗ постоянны;
d2 представляет собой в трехмерном пространстве радиус сферы, центром которого являются эфемериды ИСЗ

Производное от этого уравнения содержит радиальную скорость объекта и эфемериды ИСЗ

Таким образом, сущность способа состоит в том, что из некоторого опорного пункта с помощью локатора измеряется расстояние до объекта d3, а также его радиальная скорость (вдоль пути)  . Это может быть радио- или фидерный локатор или любой другой измеритель параметров движения объектов
. Это может быть радио- или фидерный локатор или любой другой измеритель параметров движения объектов


Совместное решение уравнений (3) и (5), а также (4) и (6) лежит в плане выполнения навигационной задачи, результаты которой необходимы для управления движением объекта, причем как с целью диспетчерского контроля, так и с целью обеспечения безопасности движения. Что касается получения информации о параметрах движения с помощью уравнений (5) и (6), то для этого помимо новых средств могут быть использованы и измерители традиционных систем управления.
Навигационная задача решается в компьютере.
Заявляемое устройство отличается тем, что в нем задействовано 1-2 квазигеостационарных ИСЗ с запросным методом измерения дальности и скорости объекта, дополненное локатором опорного пункта, связанного через пространство с ИСЗ, а на диспетчерском пункте к приемопередатчику подключены измерители дальности и скорости, выходы которых подключены к компьютеру.
Существенным отличием изобретения является совокупность введенных связей и новых элементов, т.к. только они позволяют обеспечить высокую степень надежности диспетчерского контроля за движущимися и неподвижными объектами, а также безопасность движения на транспорте.
Предлагаемые объекты изобретения иллюстрируются чертежами.
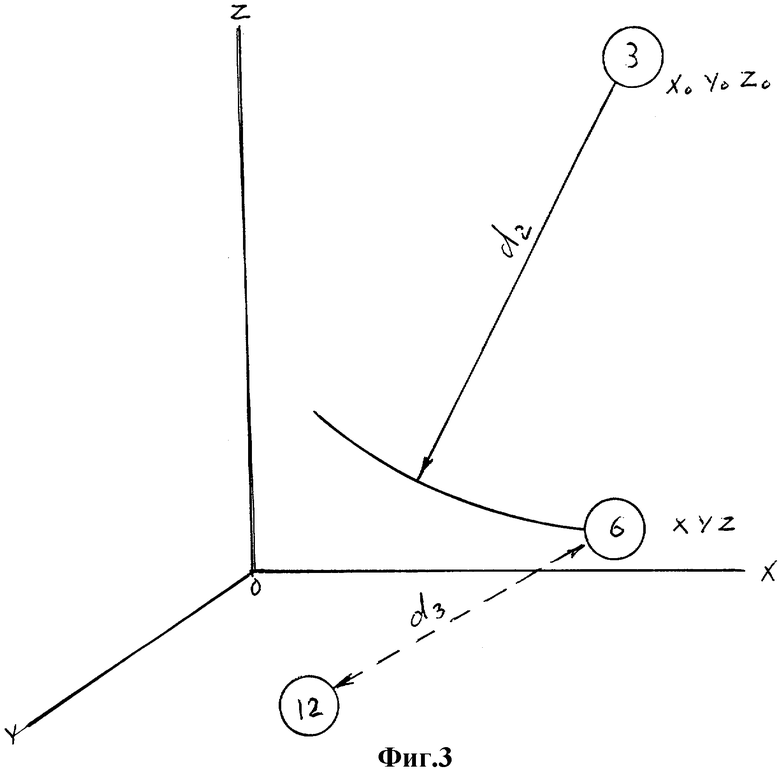
На фиг.1 представлена структурная схема изобретения, поясняющая предложенный способ измерения координат и скоростей с помощью одного искусственного спутника Земли и локатора и устройство для его осуществления. На фиг.2 приведена диаграмма расстояний между элементами системы, на фиг.3 - изображение, поясняющее заявляемый способ.
Устройство состоит из диспетчерского пункта 1, передатчика 2, искусственного спутника Земли квазигеостационарного типа (ИСЗ) 3, приемопередатчика 4, приемопередатчика 5 объекта 6, второго приемопередатчика ИСЗ 7, приемника 8, измерителя дальности (координаты) 9 и измерителя радиальной скорости 10, локатора 11, опорного пункта 12, компьютера 13.
Работа устройства осуществляется следующим образом. Передатчик 2 диспетчерского пункта 1 излучает в сторону искусственного спутника Земли (ИСЗ) 3 запросный сигнал, который ретранслируется дважды (в прямом и обратном направлениях) приемопередатчиками 4 и 7 и один раз приемопередатчиком 5 объекта 6, затем принимается приемником 8 диспетчерского пункта 1. Все перечисленные приемопередатчики связаны между собой через открытое пространство. (Беззапросный вариант подобной системы реализован на базе зарубежного спутникового созвездия и отечественного Глонасс, которые содержат по 24 ИСЗ, плюс к этому задействовано еще созвездие ИСЗ связи, содержащее в зарубежных вариантах до 66 ИСЗ; в отечественном варианте таковое пока отсутствует. Таким образом, в зарубежном варианте присутствует около 100 ИСЗ.)
Устройство отличается тем, что в нем задействовано 1-2 квазигеостационарных ИСЗ с запросным методом измерений дальности и скорости объекта, дополненное локатором 11 опорного пункта 12, связанного через пространство с ИСЗ, а на диспетчерском пункте 1 к приемнику 8 и передатчику 2 подключены измерители дальности 9 и скорости 10, выходы которых подключены к компьютеру 13.
Вместе с тем, радиоканалы от диспетчерского пункта 1 до объекта 6 и опорного пункта 12 связаны между собой через соответствующие, имеющиеся на них приемопередатчики, что позволяет в компьютере 13 не только решать навигационную и локационную задачи, но также вести документальную запись переговоров, которые могут осуществляться между операторами указанных пунктов.
Источники информации
1. Спутниковые системы связи и навигации. Труды международной научно-технической конференции (сентябрь-октябрь 1997 г. Том 1). Министерство общего профессионального образования РФ. Красноярский государственный технический университет. (Л-1)
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 2005 |
|
RU2305044C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 2010 |
|
RU2454348C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2108252C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2015 |
|
RU2595328C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
Изобретение относится к области решения задачи местоопределения движущихся и неподвижных объектов в пределах большого региона. Достигаемым техническим результатом изобретения является обеспечение диспетчерского контроля за объектами транспорта, а также безопасности движения этих объектов. Сущность изобретения заключается в том, что передатчик диспетчерского пункта излучает сигналы в сторону приемника спутника, передатчик последнего излучает эти сигналы в сторону приемника движущего объекта, а его передатчик эти сигналы излучает в направлении приемника спутника, а передатчик последнего излучает их в сторону приемника диспетчерского пункта, при этом локатор опорного пункта измеряет дальность и скорость движущегося объекта и передает эти данные через спутник в приемник диспетчерского пункта и далее в компьютер для совместного местоопределения движущегося объекта и обеспечения контроля и безопасности движения объектов. 3 ил.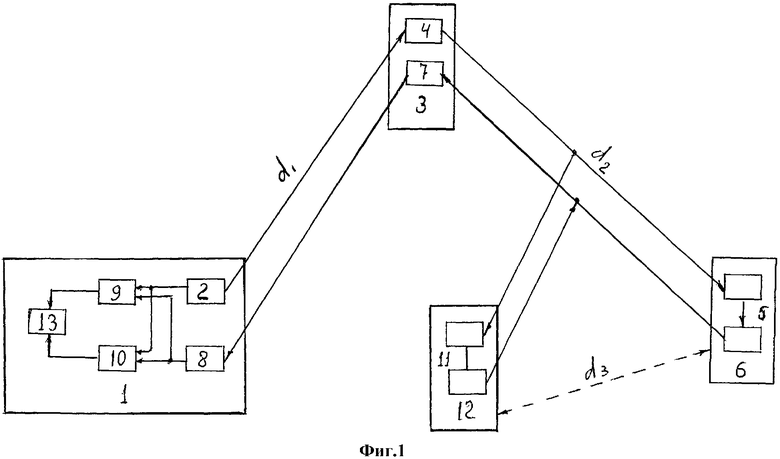
Способ измерения дальности и скорости движущихся объектов с помощью одного искусственного спутника Земли (ИСЗ) и локатора, заключающийся в том, что передатчик диспетчерского пункта излучает запросный сигнал в сторону приемника ИСЗ, передатчик которого ретранслирует эти сигналы в сторону приемника движущегося объекта, передатчик движущегося объекта ретранслирует эти сигналы в направлении приемника ИСЗ, передатчик которого излучает их в сторону приемника диспетчерского пункта, причем передатчик и приемник диспетчерского пункта связаны на диспетчерском пункте с измерителями координат дальности и скорости движущегося объекта, выходы которых подключены к компьютеру, отличающийся тем, что локатор опорного пункта измеряет дальность и скорость движущегося объекта, затем эти данные через ИСЗ передают в приемник диспетчерского пункта и далее в компьютер для совместного с данными, измеренными на диспетчерском пункте измерителями координат дальности и скорости движущегося объекта, местоопределения движущегося объекта и с возможностью обеспечения диспетчерского контроля и безопасности движения объектов, кроме того, диспетчерский пункт, движущийся объект и опорный пункт связаны между собой каналами дуплексной связи через соответствующие, имеющиеся на них приемопередатчики с возможностью обеспечения документальной записи переговоров между операторами указанных пунктов и движущегося объекта.
| СОЛОВЬЕВ Ю.А | |||
| Спутниковая радионавигация | |||
| - М.: ЭКО ТРЕНДЗ, 2000, гл.2, с.20-44, гл.3, с.45-66, гл.4, с.67-75 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ С ПОМОЩЬЮ ОДНОГО СПУТНИКА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2241239C2 |
| СПУТНИКОВАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2158000C1 |
| US 2004235497 А1, 25.11.2004 | |||
| WO 2004057362 А2, 08.07.2004. | |||

