Изобретение относится к области гидроавтоматики и может быть использовано в конструкциях станков, промышленных роботов, испытательных стендов и летательных аппаратов.
Известен способ адаптивного управления электрогидравлической следящей системой, при котором по рабочим командам устройства числового программного управления с помощью электрогидравлического усилителя создают перепад давления на гидродвигателе, выходным штоком которого воздействуют на толкатель, опертый на разжимные элементы, а датчик перемещения формирует импульсы, воспринимаемые операторами условного перехода, и фиксируют момент касания внутренней поверхности объекта регулирования, одновременно известна электрогидравлическая следящая система, содержащая электрогидравлический усилитель, гидродвигатель, шток которого связан с датчиком перемещения толкателя, а также устройство числового программного управления, имеющее операторы условного перехода [1]
Недостатком известного способа и системы являются узость функциональных возможностей и низкая точность, связанные с преобразованием вращательного перемещения вала гидродвигателя в поступательное перемещение штока и толкателя.
Известен также способ адаптивного управления электрогидравлической следящей системой, при котором по рабочим командам устройства числового программного управления с помощью электрогидравлического усилителя создают перепад давления на гидродвигателе и выходным штоком последнего воздействуют вдоль одного направления с одной стороны на толкатель, опертый на разжимные элементы, а с другой на датчик перемещения толкателя, формирующий сигналы в виде импульсов, воспринимаемых устройством числового программного управления, а также фиксируют момент касания разжимными элементами внутренней поверхности объекта регулирования и контролируют величину рассогласования с помощью последовательно включенных операторов условного перехода, осуществляющих фиксацию момента касания и передачу управления электрогидравлическом усилителем соответствующему оператору рабочих команд устройства числового программного управления, одновременно известна электрогидравлическая следящая система, содержащая электрогидравлической усилитель, подключенный к гидродвигателю, выходной шток которого кинематически связан вдоль направления с одной стороны с импульсным датчиком перемещения, а с другой с толкателем, опертым на разжимные элементы, прижатые к внутренней поверхности объекта регулирования, а также устройство числового программного управления электрогидравлическим усилителем, имеющее последовательно включенные операторы рабочих команд и операторы условного перехода, связанные с датчиком перемещения [2]
Техническими недостатками данного способа и системы являются низкая точность контроля рассогласования и ограниченность функциональных возможностей из-за отсутствия предварительного определения размера образцового отверстия и прекращения режима адаптивного управления при касании разжимными элементами объекта регулирования.
Технической задачей изобретения является повышение точности и расширение функциональных возможностей способа и системы за счет сравнения радиального положения разжимных элементов при контакте с образцовым отверстием и объектом регулирования и обеспечения адаптивного управления в течение всего периода воздействия разжимных элементов на объект регулирования.
Сущность изобретения заключается в том, что в способе адаптивного управления электрогидравлической следящей системой, при котором по рабочим командам устройства числового программного управления с помощью электрогидравлического усилителя создают перепад давления на гидродвигателе и выходным штоком последнего воздействуют вдоль одного направления с одной стороны на толкатель, опертый на разжимные элементы, а с другой на датчик перемещения толкателя, формирующий сигналы в виде импульсов, воспринимаемых устройством числового программного управления, а также фиксирует момент касания разжимными элементами внутренней поверхности объекты регулирования и контролирует величину рассогласования в системе с помощью последовательно включенных операторов условного перехода, осуществляющих фиксацию момента касания и передачу управления соответствующему оператору рабочих команд устройства числового программного управления, разжимные элементы предварительно вводят во взаимодействие до касания с образцовым кольцом, дополнительно установленным соосно упомянутому направлению воздействия на датчик перемещения, сигнал которого в момент касания фиксирует, а для управления воздействием разжимных элементов на объект регулирования осуществляют сравнение их радиального положения на поверхности образцового кольца и на поверхности объекта регулирования, при этом каждому радиальному положению разжимных элементов ставят в соответствие сигнал датчика перемещения, который используют для вычисления рассогласования и для указанного сравнения радиального положения разжимных элементов, осуществляемого с помощью оператора условного перехода. Кроме того перепад давления на гидродвигателе изменяют за счет перемещения дросселирующего золотника с помощью шагового двигателя. Одновременно, электрогидравлическая следящая система для реализации способа, содержащая электрогидравлический усилитель подключенный к гидродвигателю, выходной шток которого кинематически связан вдоль одного направления с одной стороны с импульсным датчиком перемещения, а с другой с толкателем, опертым на разжимные элементы, взаимодействующие с внутренней поверхностью объекта регулирования, а также устройство числового программного управления электрогидравлическим усилителем, имеющее последовательно включенные операторы рабочих команд и операторы условного перехода, связанные с датчиком перемещения, снабжена образцовым кольцом, установленным соосно направлению воздействия на датчик перемещения и с возможностью предварительного взаимодействия с разжимными элементами, а устройство числового программного управления выполнено в виде четырех операторов условного перехода и десяти операторов рабочих команд, причем операторы условного перехода установлены на выходах третьего, пятого, седьмого по порядку последовательно включенных операторов рабочих команд. Кроме того электрогидравлический усилитель выполнен в виде дросселирующего золотника и шагового двигателя, подключенного к устройству числового программного управления.
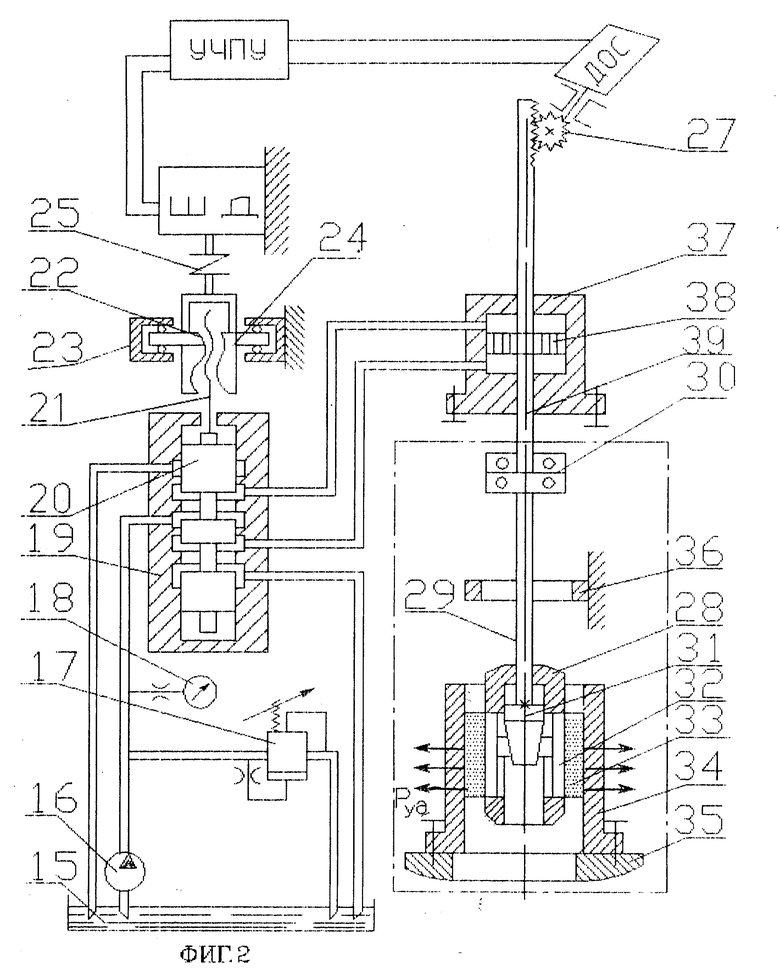
На фиг.1 изображена блок-схема устройства числового программного управления на примере рабочего цикла хонинговального станка;на фиг.2 - конструктивная схема электрогидравлической следящей системы на примере хонинговального станка, реализующей предложенный способ.
Устройство числового программного управления (фиг.1) содержит четыре оператора 4, 7, 10, 12 условного перехода и десять операторов 1, 2, 3, 5, 6, 8, 9, 11, 13, 14 рабочих команд, причем операторы 4, 7 предназначены для сравнения текущего значения рассогласования Р в системе с заданным значением рассогласования Рзад и установлены на выходах третьего и пятого по порядку операторов 3, 6 рабочих команд, оператор 10 предназначен для контроля достижения заданного размера как радиального положения разжимных элементов, и установлен на выходе седьмого по порядку оператора 9 рабочих команд, а оператор 12 предназначен для контроля заключительного сжатия разжимных элементов и установлен на входе по порядку оператора 11 рабочих команд. Операторы 1, 14 представляют собой операторы рабочих команд "Начало" и "Конец" алгоритма, оператор 2 "Перемещение из исходного положения в зону образцового кольца", оператор 3 радиальная подача разжимных элементов до упора с образцовым кольцом", оператор 5 "Отключение радиальной подачи, запоминание размера образцового кольца, сжатие разжимных элементов и перемещение к объекту регулирования", оператор 6 "Быстрая радиальная подача разжимных элементов", оператор 8 "Переключение радиальной подачи с быстрого на рабочий ход", оператор 9 "Рабочий ход (съем припуска)", оператор 11 "Отключение рабочей радиальной подачи, быстрое сжатие разжимных элементов", оператор 13 - "Перемещение в исходное положение". Электрогидравлическая следящая система содержит бак 15, гидронасос 16, предохранительный клапан 17, манометр 18, корпус 19 с дросселирующим золотником 20, жестко связанным с винтом 21. Гайка 22 винта 21 размещена в обойме 23 на опорах 24 качения и жестко соединена с шаговым электрическим двигателем 25. Золотник 20 и двигатель 25 представляют собой в совокупности электрогидравлический усилитель, подключенный к гидродвигателю в виде гидроцилиндра 37 с поршнем 38 и выходным штоком 39, кинематически связанным вдоль одного направления, с одной стороны, рейкой 26 с импульсным датчиком 27 перемещения толкателя, выполненного в виде конуса 31, а, с другой стороны, осью 29 с конусом 31, опертым на разжимные элементы, выполненные в данном частном случае в виде абразивных (или алмазных) брусков 33, размещенных в корпусе 28 хона 32.
Объект регулирования представляет собой, например, полую обрабатываемую деталь 34, закрепленную в приспособлении 35. Образцовое кольцо 36 установлено соосно с направлением воздействия на датчик 27 с возможностью предварительного взаимодействия с брусками 33. Станок имеет привод продольной подачи хона 32 совместно с гидроцилиндром 37 и всей системой. Он предназначен для быстрого подвода и отвода хона 32 и для его продольного перемещения при съеме припуска детали 34. На чертеже этот привод не изображен, т.к. не входит в объем притязаний заявителя по данной заявке.
Способ адаптивного управления электрогидравлической следящей системой реализуется следующим образом.
По рабочей команде оператора 1 жидкость под давлением от гидронасоса 16 поступает в корпус 19 и с помощью электрогидравлического усилителя в зависимости от положения золотника 20 в корпусе 19 подается в одну из полостей гидроцилиндра 37 для создания перепада давления. Величина подводимого давления настраивается по манометру 18 клапаном 17. Перемещение золотника 20 в корпусе 19 осуществляют с помощью шагового двигателя 25 по командам операторов 1-14. Штоком 39 гидроцилиндра 37 воздействуют вдоль одного направления, с одной стороны, на толкатель, выполненный в виде конуса 31, а с другой на датчик 27, формирующий сигналы в виде импульсов, количество которых пропорционально радиальному перемещению разжимных элементов в виде брусков 33, а частота их следования скорости разжима брусков 33. В результате воздействия конуса 31 происходит радиальная подача, т.е. изменение радиального положения брусков 33. Предварительно, по команде оператора 2 бруски 33 с хоном 32 перемещаются приводом продольной подачи к образцовому кольцу 36 и по команде оператора 3 за счет радиальной подачи до упора их вводят во взаимодействие до касания с внутренней поверхностью кольца 36. Сигнал датчика 27 в момент касания фиксируют. Оператор 4 контролирует величину рассогласования в системе и по результатам контроля осуществляет фиксацию момента касания брусками 33 кольца 36 и передачу управлению оператора 3 по выходу "Нет" или оператору 5 по выходу "Да". Оператор 5 обеспечивает запоминание размера кольца 36 как радиального положения брусков 33 на поверхности его отверстия, а также последующее сжатие брусков 33 и перемещение их приводом продольной подачи в отверстие детали 34. Затем оператор 6 подает рабочую команду на быструю радиальную подачу брусков 33, а оператор 7 продолжает контролировать величину рассогласования по скорости, что обеспечивает фиксацию момента касания брусками 33 поверхности детали 34. Далее оператор 8 обеспечивает переключение с быстрой радиальной подачи на рабочий ход привода продольной подачи, т.е. на обработку поверхности детали 34 брусками 33, при которой производится съем припуска, предусмотренный оператором 9. Одновременно со съемом припуска происходит рабочая радиальная подача и разжатие брусков 33 с соответствующим изменением сигналов датчика 27. При этом каждому радиальному положению брусков 33 ставят в соответствие сигнал датчика 27, который используют для вычисления рассогласования и для сравнения радиального положения брусков 33, осуществляемого с помощью оператора 10 условного перехода. Оператор 10 производит указанное сравнение текущего радиального положения брусков 33 на поверхности детали 34 с предварительно зафиксированным по сигналу датчика 27 в момент касания брусков 33 поверхности образцового кольца 36, а после достижения равенства передает управление оператору 11. Последний осуществляет отключение рабочей подачи и быстрое сжатие брусков 33 за счет создания противоположного по знаку перепада давления на гидроцилиндре 37. Когда оператор 12 подтверждает завершение сжатия, операторы 13, 14 обеспечивают перемещение приводом подачи хона 32 в исходное положение, отключение гидронасоса от гидроцилиндра 37 и окончание цикла работы системы.
Использование данного изобретения позволит повысить точность воспроизведения режимов работы испытательных стендов, точность перемещения рабочих органов промышленных роботов, точность стыковки узлов летательных аппаратов и точность финишной обработки ответственных деталей без усложнения конструкции исполнительной электрогидравлической следящей системы и без расширения номенклатуры измерительных средств. Одновременно расширяются функциональные возможности этой системы для осуществления позиционирования рабочих органов различных механизмов при их радиальном перемещении за счет адаптивного управления в течение всего периода воздействия разжимных элементов на объект управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1992 |
|
SU1834993A3 |
| Электрогидравлическая следящая система | 1980 |
|
SU937796A1 |
| Электрогидравлическая следящая система | 1976 |
|
SU926379A1 |
| Способ управления электрогидравлическим следящим приводом | 1992 |
|
SU1834994A3 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Способ настройки исходного положения электрогидравлического следящего привода с числовым программным управлением | 1992 |
|
SU1834991A3 |
| РОТОРНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2099540C1 |
| Электрогидравлическая следящая система | 1980 |
|
SU928090A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Электрогидравлическая следящая система | 1980 |
|
SU903586A1 |
Использование: в области гидроавтоматики. Сущность изобретения: в способе адаптивного управления электрогидравлической следящей системой, при котором по рабочим командам устройства числового программного управления с помощью электрогидравлического усилителя создают перепад давления на гидродвигателе и выходным штоком последнего воздействуют вдоль одного направления, с одной стороны, на толкатель, опертый на разжимные элементы, а с другой - на датчик перемещения толкателя, формирующий сигналы в виде импульсов, воспринимаемых устройством числового программного управления, а также фиксируют момент касания разжимными элементами внутренней поверхности объекта регулирования и контролируют величину рассогласования в системе с помощью последовательно включенных операторов условного перехода, осуществляющих фиксацию момента касания и передачу управления соответствующему оператору рабочих команд устройства числового программного управления, разжимные элементы предварительно вводят во взаимодействие до касания с образцовым кольцом, дополнительно установленным соосно с упомянутым направлением воздействия на датчик перемещения, сигнал которого в момент касания фиксируют. 2 с.и 2 з.п.ф-лы, 2 ил.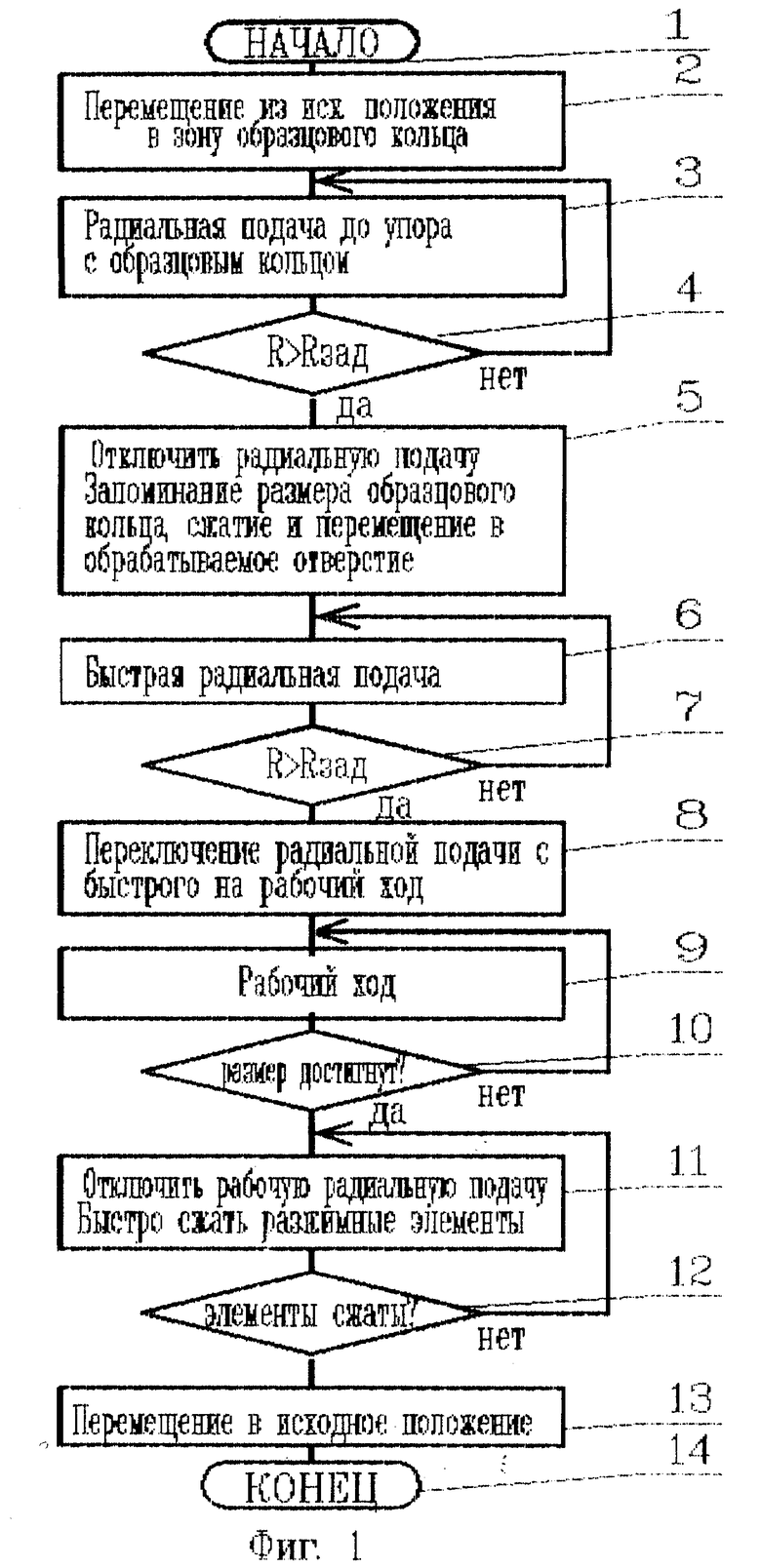
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электрогидравлическая следящая система | 1992 |
|
SU1834993A3 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрогидравлическая следящая система | 1992 |
|
SU1834993A3 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
