(54) Э,ПЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод подачи деревообрабатывающего станка | 1984 |
|
SU1166991A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2013 |
|
RU2529965C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА РАЗДЕЛЬНОГО ТИПА | 1966 |
|
SU184577A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Стенд для испытания рулевых механизмов транспортных средств | 1985 |
|
SU1280376A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
1
Изобретение относится к области гидроавтоматики и может быть использовано в пригюдах исполнительных органов копировальных станков.
Известна электрогидравлическая следящая система, содержащая электронный усилитель, связанный с обмоткой управления электрогидравлического усилителя, четырехлинейный следящий золотник которого гидравлически связан с гидромотором, тахогенератор и датчик рассогласования по положению, кинематически связанные с валом гидромотора, а электрическими цепями обратной связи по скорости и по . положению - со входом электронного усилителя, и цепь обратной связи по току электроннемо усилителя (1.
Недостатками известной системы являются малые быстродействие и устойчиность.
Цель изобретения - повышение быстрол йствия и устойчивости.
Указанная цель достигается тем, что сие |(мя снабжена электрически связанными г.иж.т, собой пропорциональным регулято| пм. ciiMxpoFiMbiM детектором, и двумя реI y.iupvtMbiMn сопротивлениями, установленными в цепях обратной связи по скорости и по току, а пропорциональный регулятор входом подключен к датчику рассогласования и выходом - к регулируемому сопротивлению в цепи обратной связи
5 по току, пр.ичем вход синхронного детектора подключен к обмотке управления, а выход - к регулируемому сопротивлению в цепи обратной связи по скорости.
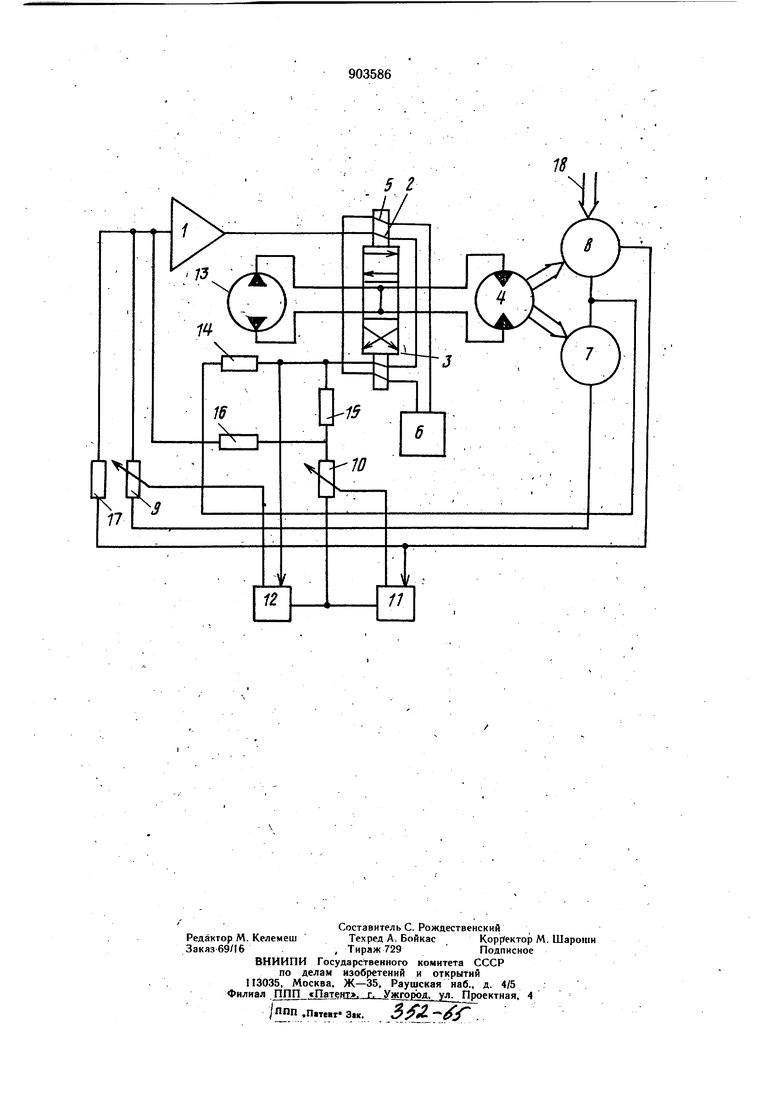
На чертеже изображена предлагаемая
и электрогидравлическая следящая система.
Система содержит электронный усилитель 1 с цепью обратной связи по току, связанный с обмоткой управления 2 элект15 рогидравлического усилителя, выполненного в виде четырехлинейного следящего золотника 3, гидравлически связанного с гидромотором 4 и имеющего обмотку осцилляции 5, электромагнитно связанную с об2Q моткой 2 и питаемую от генератора осцилляции 6, тахогенератор 7 и датчик 8 рассогласования по положению, кинематически связанные с валом гидромоторэ 4 Хна чертеже не изображен), а электрическими цепями обратной связи по скорости и по 3 пи.юженик) со входом усилителе 1 приifiM в цени обратной связи по скорости усTaiioBJKiio |Н|-у.()е соиротинленнс ;i в цени обратной овязи ио току -- регулируемое сонрогии/и-инс 10. К датчику 8 по.аключен входом п)оиорииоиа..1ьный . )еlyл lT(Jl) 1 f а к laxureiiepa гору 7 - синх|)1)нмый детектор 12, г лектрически связанные между собой, а .выходами, модклюK-Hiii.ie к сонрот111 ле11иим 10 и 9 соотвегсгвенио. 1 абочая жидкость в системе нос-|унает от- насоса 13, Дли установки номинального тока, в обмотке 2 система снабжена сопротивлением 14, а сопротивления 15, 16 и 17 представляют собой эквивалентные комплексные сопротивления, корректирующих звеньев (на чертеже не изображены). Ко входу датчика 8 подключен задатчнк положения 18. Элект)огияравлическая следящаяся система работает следующим образом. При наличии рассогласования датчик 8 выдает иапряжеине О1нибки, полярность которого определяется разницей положений задатчика положения 18 и вала тидромотора 4. Это напряжение усиливается усилителем 1 и вызывает протекание через обмотку 2 золотника 3 тока соответствующей полярности. Это же напряжение, приложенное к пропорциональному регулятору II, приводит к изменению величины сопротивления 10 и возрастанию коэффициента усилия но току усилителя 1, что приводит к форсированию режима отработки задаюн1егг) воздействия. Ток в обмотке 2 золотника 3 протекает в направлении, при котором обеспечивается наискорейшая ликвидация возникшего рассогласования, вызванного изменением положения задатчика пп.можеиия 18. Б этом случае воз| астает колебание переменного сигнала в обмотке 2 золотника 3, вызванное потерей устойчивости системы за счет высокого петлевого коэффициента усиления. Этот переменный сигнал поступает На вход синхроппого детектора 12, преобразуется и изменяет величину сопротивления 9. При этом глубина отрицательной обратной связи по скорости возрастает, коэффициент ycилe п я по положению уменьитется, система выходит из области неустойчивой работы н устанавливается коэффициент уси)ения, близкий к оптимальному. С уменьшением угловой огпибки между по.ложепмямп зядатчика положения 18 и вала гид96 ромотора 4 система возвращается в исходТаким образом, за счет наличия системы подстройки параметров электрогидравлической следящей системы в виде регулятора И, детектора 12 и сопротивлений 9 и 10 отпадает необходимость в ручных регулировках и настройках, вызванных старением и изменением параметров элементов системы. Чтобы избежать возникновения колебаний и неустойчивости по этой причине, снижают с некоторым запасом петлевой коэффициент усиления, что приводит к незначительному снижению точности слежения. Использование Г1редлагаемого изобретения позволяет повысить быстродействие и устойчивость приводов исполнительных органов и копировальных станков. Формула изобретения Электрогидравлическая следящая система, содержащая электронный усилитель, связанный с обмоткой управления электрогидравлическрго усилителя, четырехлинейный следящий золотник которого гидравлически связан с гидромотором, тахогенератор и датчик рассогласования по положению, кинематически связанные с валом гидромотора, а электрическими цепями обратной связи по скорости и по положению - со входом электронного усилителя, и цепь обратной связи по току электронного усилителя, отличающаяся тем, что, с целью повьипения быстродействия и устойчивости, система снабжена электрически связанными ме.жду собой пропорциональным регулятором, синхронным детектором и двумя регулируемыми сопротивлениями, установленными в цеггях обратной связи по скорости и по току, а пропорциональный регулятор входдм подключен к датчику рассогласования и выходом - к регулируемому сопротивлению в цепи обратной связи по току, причем вход синхронного детектора подключен к обмотке управления, а выход - к регулируемому сопротивлению в цепи обратной связи по скорости. Источники информации, принятые во внимание при экспертизе 1. Чемоданов Б. К. Следящие приводы. М., «Энергия, 1976, кн. 2, с. 351, рис. 5- 7.
