Изобретение относится к робототехнике и может быть использовано в манипуляционных системах автоматизированных технологических комплексов, где требуется точное перемещение деталей и изделий, приборов и исследуемых образцов и т.п.
Известны манипуляторы, предназначенные для переноса и установки изделий в положения, требуемые для обеспечения требований технологии.
1. Манипулятор-платформа по патенту РФ №2093344.
2. Манипулятор ЕР 0725710 В1, опубл. 30.12.1998 г.
Недостатком аналогов является отсутствие возможностей обеспечения перемещения с высокой точностью (порядка 1 мкм), например, рентгеновских приборов и исследуемых образцов.
Наиболее близким аналогом по технической сущности к изобретению является манипулятор-платформа по патенту РФ №2365488 для лазерного технологического комплекса, выполненная на электроприводах прямого действия с инкрементальными датчиками обратной связи, содержащий два дуговых электропривода, один электропривод вращательного типа и один линейный электропривод. Прототип обеспечивает перемещение детали тремя вращательными и одним поступательным движением. Указанные электроприводы обеспечивают точность перемещения не выше 0,005 0,01 мм, а также не обеспечивают необходимой точности перемещения источника и приемника рентгеновского излучения и исследуемых или обрабатываемых образцов по технологии исследования.
Задача изобретения - повышение точности перемещения и обеспечение технологичтости исследования.
Поставленная задача достигается тем, что в манипулятор рентгеновского микротомографа, содержащий объектный столик, вращающийся вокруг вертикальной оси Z и подвижный вдоль нее, подвижные вдоль горизонтальной оси X платформы для аппаратуры рентгенооптического тракта, устройство микропроцессорного управления и корпус, внесены новые конструктивные признаки, а именно: платформы смонтированы вдоль горизонтальной оси X на отдельных и подвижных каретках, установленных на направляющих, смонтированных неподвижно на корпусе, к каждой платформе прикреплен неподвижно магнитопровод-ротор соответствующего линейного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи, индукторы которых и приемники сигнала оптических датчиков смонтированы неподвижно на корпусе, объектный столик смонтирован на внутренней части шлицевой втулки, подвижной вдоль вертикальной оси Z, и прикреплен неподвижно к магнитопровод-ротору линейного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи, ротор сегментного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи смонтирован на внешней части шлицевой втулки, индукторы которых вместе с приемниками сигналов оптических датчиков смонтированы неподвижно на корпусе.
Технический результат, достигаемый заявленным изобретением - повышенная точность перемещения (±0,5 мкм), т.е. манипулятор обеспечивает послойную фиксацию срезов исследуемых образцов 1 мкм.
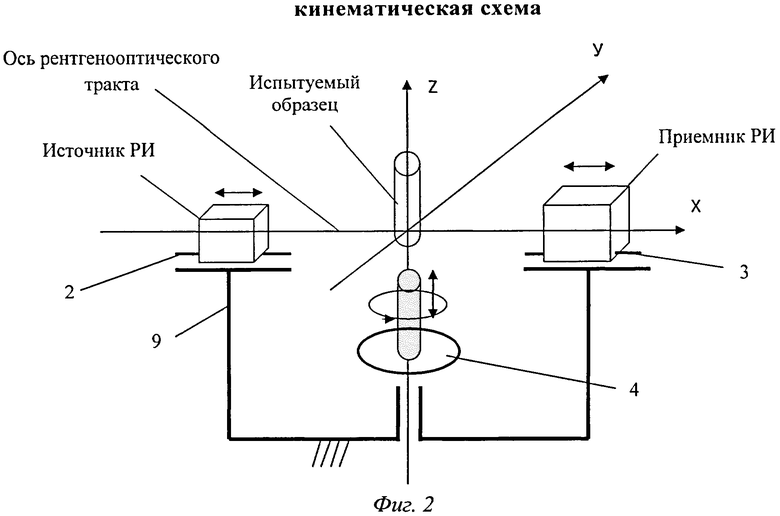
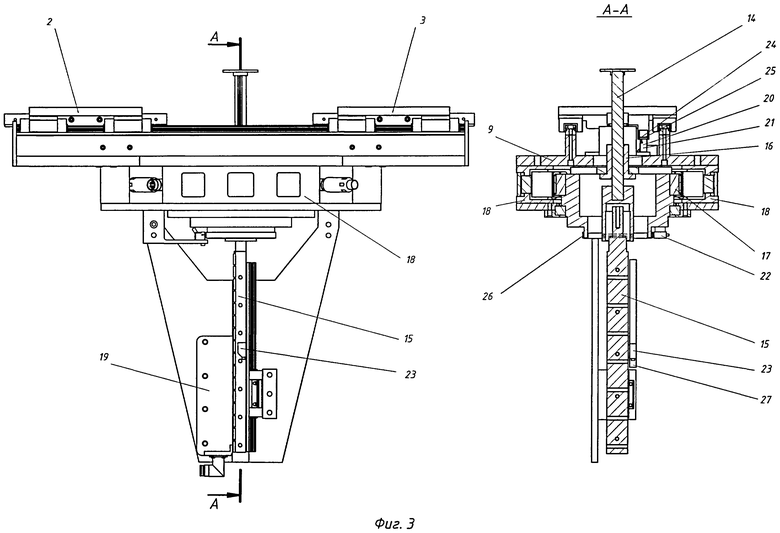
На фиг.1 представлен общий вид манипулятора с устройством микропроцессорного управления позиционированием компонентов рентгеновского микротомографа; на фиг.2 - кинематическая схема; на фиг.3 - вид А на разрез манипулятора.
Манипулятор (фиг.1) содержит устройство микропроцессорного управления 1, платформы крепления 2 и 3 источника и приемника рентгеновского излучения, соответственно, рабочий стол 4 для установки исследуемых образцов, платформы 2 и 3, смонтированы на отдельных, подвижных вдоль горизонтальной оси X на каретках 5 и 6, смонтированных подвижно на направляющих 7 и 8, установленных на корпусе 9, к каждой платформе прикреплен неподвижно магнитопровод-ротор 10 и 11 соответствующего линейного электромехатронного модуля движения по горизонтальной оси X, индукторы 12 и 13 которых смонтированы неподвижно на корпусе 9, рабочий стол 4 смонтирован на подвижной вдоль вертикальной оси внутренней части 14 шлицевой втулки (фиг.2) и прикреплен неподвижно к магнитопровод-ротору 15 линейного электромехатронного модуля движения вертикальной оси Z, внешняя часть 16 шлицевой втулки смонтирована на вращающемся магнитопровод-роторе 17 сегментного электромехатронного модуля движения, индукторы 18 и 19 которых, соответственно, смонтированы неподвижно на корпусе 9. Линейные и сегментный электромехатронные модули движения содержат оптические датчики положения с движущейся частью 20, 21, 22 и 23, расположенными, соответственно, на магнитопровод-роторах 10, 11, 15 и 17, с приемниками сигналов 24, 25, 26 и 27, соответственно, используемые устройством микропроцессорного управления 1 для организации обратной связи (фиг.1). Кинематическая схема манипулятора (фиг.2) обеспечивает демонстрацию устройства рентгеновского микротомографа, облегчая понимание технологию его функционирования. По оси рентгенооптического тракта X на платформах 2 и 3, смонтированных на корпусе 9, расположены источник и приемник рентгеновского излучения, соответственно, источник РИ и приемник РИ, перемещаемыми вдоль оси X. По оси Z расположен объектный столик 4 с испытуемым образцом, перемещаемым вокруг и вдоль оси Z.
Манипулятор работает следующим образом. Устройство микропроцессорного управления 1 (фиг.1), в соответствии с технологией исследования, подает сигналы управления на индукторы 12 и 13 линейных электромехатронных модулей движения для выставки в необходимое положение вдоль оси X рентгенооптического тракта источника и приемника рентгеновского излучения для получения четких рентгеновских изображений. После выставки источника и приемника, необходимо перемещать и вращать рабочий стол 4 с исследуемыми образцами вдоль и вокруг оси Z, что осуществляется подачей от микропроцессора 1 сигналов управления на индукторы 18 и 19 соответственно линейного и сегментного электромехатронных модулей движения, в соответствии с технологией исследования. Сигналы о положении при перемещении платформы 2 и 3 источника и приемника, соответственно, рабочего стола 4, поступают от приемников сигналов датчиков положения 24, 25, 26 и 27 и используются устройством микропроцессорного управления 1 в обратной связи линейных и сегментного электромехатронных модулей движения, что обеспечивает требуемую точность перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 2005 |
|
RU2365488C2 |
| Устройство управления манипулятором | 1990 |
|
SU1781024A1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТРЕНАЖЕР | 2005 |
|
RU2361567C2 |
| Устройство для проведения инструментального индентирования с возможностью экспериментального наблюдения области контакта индентора с поверхностью образца в реальном времени | 2022 |
|
RU2796200C1 |
| Устройство 3D визуализации деформационного состояния поверхности материала в области упругих деформаций | 2019 |
|
RU2714515C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| Рентгеновское вычислительное томографическое устройство | 1989 |
|
SU1608526A1 |
| Уравновешенная манипуляционная система | 1990 |
|
SU1821354A1 |
Изобретение относится к робототехнике и может быть использовано в манипуляционных системах автоматизированных технологических комплексов, где требуется точное перемещение деталей и изделий, приборов и исследуемых образцов. Манипулятор содержит объектный столик, вращающийся вокруг вертикальной оси Z и подвижный вдоль нее, подвижные вдоль горизонтальной оси X платформы для аппаратуры рентгенооптического тракта, устройство микропроцессорного управления и корпус. Платформы смонтированы вдоль горизонтальной оси X на отдельных и подвижных каретках, установленных на направляющих, смонтированных неподвижно на корпусе. К каждой платформе прикреплен неподвижно магнитопровод-ротор соответствующего линейного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи, индукторы которых и приемники сигнала оптических датчиков смонтированы неподвижно на корпусе. Объектный столик смонтирован на подвижной вдоль вертикальной оси Z внутренней части шлицевой втулки и прикреплен неподвижно к магнитопровод-ротору линейного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи, ротор сегментного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи смонтирован на внешней части шлицевой втулки, индукторы которых вместе с приемниками сигналов оптических датчиков смонтированы неподвижно на корпусе. 3 ил.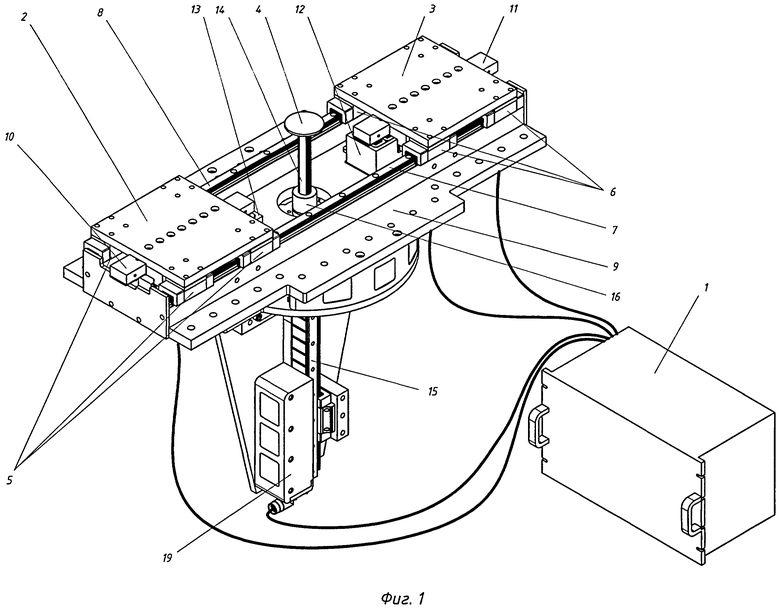
Манипулятор рентгеновского микротомографа, содержащий объектный столик, вращающийся вокруг вертикальной оси Z и подвижный вдоль нее, подвижные вдоль горизонтальной оси X платформы для аппаратуры рентгенооптического тракта, устройство микропроцессорного управления и корпус, отличающийся тем, что платформы смонтированы вдоль горизонтальной оси X на отдельных и подвижных каретках, установленных на направляющих, смонтированных неподвижно на корпусе, к каждой платформе прикреплен неподвижно магнитопровод-ротор соответствующего линейного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи, индукторы которых и приемники сигнала оптических датчиков смонтированы неподвижно на корпусе, объектный столик смонтирован на подвижной вдоль вертикальной оси Z внутренней части шлицевой втулки и прикреплен неподвижно к магнитопровод-ротору линейного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи, ротор сегментного электромехатронного модуля движения с движущейся частью оптического датчика обратной связи смонтирован на внешней части шлицевой втулки, индукторы которых вместе с приемниками сигналов оптических датчиков смонтированы неподвижно на корпусе.
| Прибор для замера аэрации пульпы | 1975 |
|
SU725710A1 |
| ЕР 0001106141 А2, 13.06.2001 | |||
| Устройство для подводного бетонирования | 1940 |
|
SU76210A1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 2005 |
|
RU2365488C2 |

