Изобретение относится к робототехнике и может быть использовано в манипуляционных системах во многих отраслях народного хозяйства.
Известны манипуляторы, содержащие устройство формирования управляющих сигналов и автоматизированный линейный электропривод.
Наиболее близким к предложенному устройству по технической сущности является графопостроитель - манипулятор с прямоугольной системой координат основных движений. В нем на вход блоков управления линейными электродвигателями подаются электрические сигналы, пропорциональные текущим координатам в виде последовательности импульсов. Подвижные индукторы линейных электродвигателей, перемещаясь вдоль неподвижных якорей, перемещают ленточные передачи, которые, обкатываясь по роликам, перемещают соответствующие каретки ходовых балок, указанные кинематические передачи с независимыми ветвями повышают точность работы графопостроителя и улучшают динамические характеристики путем возможности уравновешивания подвижных частей.
Недостатками известного устройства являются малая жесткость и прочность ленточных передач, необходимость устройства контактного или бесконтактного подвода электропитания к подвижному индуктору, а также отсутствие датчика ускорения и микропроцессорных средств управления, позволяющих формировать адаптивный способ управления манипулятором в условиях внешних возмущающих сил.
С целью расширения функциональных возможностей и повышения эффективности -управления манипулятором, а также повышения точности и надежности его работы, в устройство формирования управляющих сигналов передают информацию о величисл С
И
( |и
о
ю -N
ивож
не и направлении ускорения управляемого звена, вычисляют движущую силу в течение рабочего цикла, используя информацию о массе подвижных звеньев манипулятора, включая массу груза и формируют соответствующие величины и направления токов, подаваемых в обмотки управления электродвигателя для обеспечения необходимого закона перемещения рабочего органа, причем индукторы линейного электродвигателя смонтированы в корпусе неподвижно и попарно на противоположных его сторонах, соответствующие индукторы подвижные якоря имеют вдоль магнитопровода зубчатые рейки, при помощи которых якоря каждой пары кинематически связаны зубчатым колесом, смонтированным на корпусе, один якорь каждой пары неподвижно соединен с ходовой балкой и уравновешен со вторым якорем этой пары, на валу зубчатого колеса смонтированы датчики углового положения и ускорения, выход датчика углового ускорения через аналого-цифровой преобразователь соединен с микропроцессором.
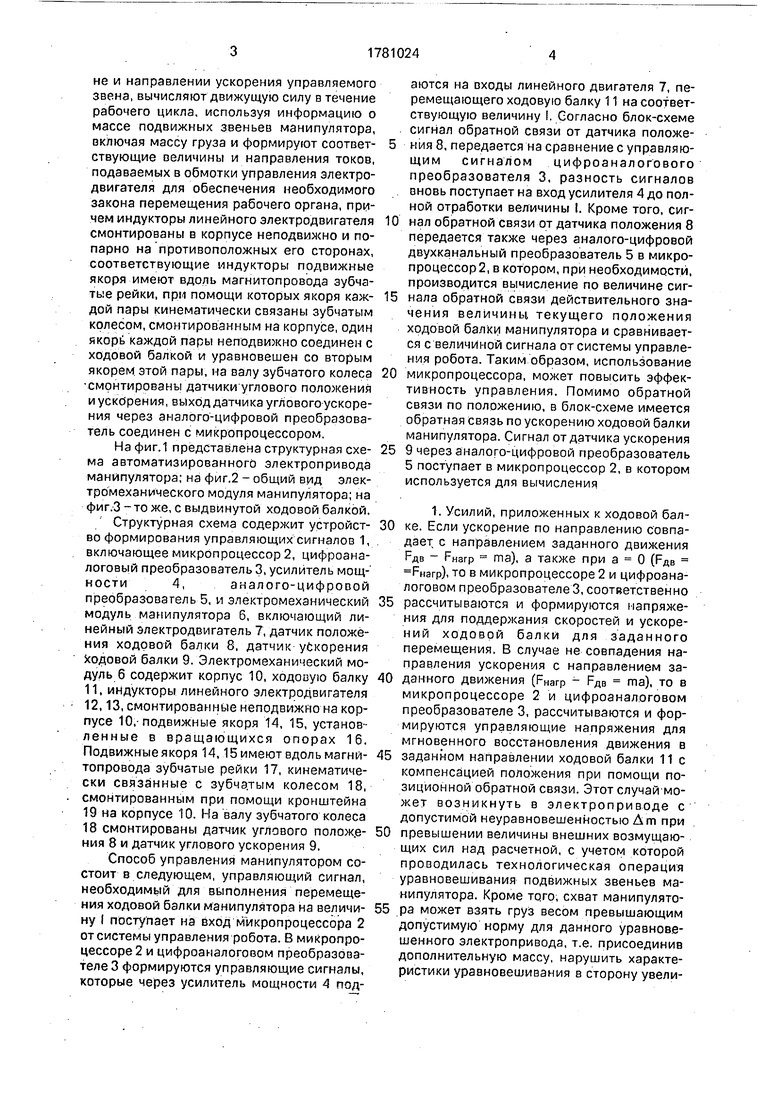
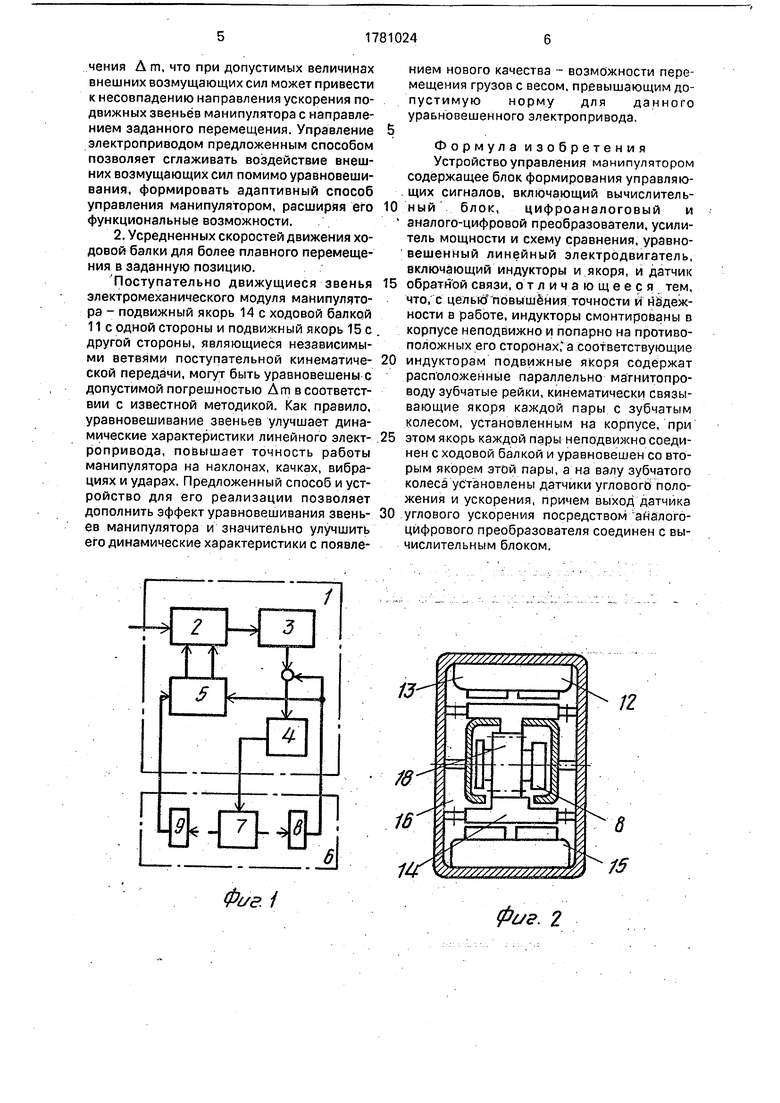
На фиг.1 представлена структурная схема автоматизированного электропривода манипулятора; на фиг.2 - общий вид электромеханического модуля манипулятора; на фиг.З -то же, с выдвинутой ходовой балкой.
Структурная схема содержит устройство формирования управляющих сигналов 1, включающее микропроцессор 2, цифроана- логовый преобразователь 3, усилитель мощности4,аналого-цифровой преобразователь 5, и электромеханический модуль манипулятора 6, включающий линейный электродвигатель 7, датчик положения ходовой балки 8, датчик ускорения ходовой балки 9. Электромеханический модуль б содержит корпус 10, ходооую балку 11, индукторы линейного электродвигателя 12,13, смонтированные неподвижно на корпусе 10, подвижные якоря 14, 15, установленные в вращающихся опорах 16. Подвижные якоря 14,15 имеют вдоль магнитопровода зубчатые рейки 17, кинематически связанные с зубчэ.тым колесом 18, смонтированным при помощи кронштейна 19 на корпусе 10. На валу зубчатого колеса 18 смонтированы датчик углового полож.е- ния 8 и датчик углового ускорения 9.
Способ управления манипулятором состоит в следующем, управляющий сигнал, необходимый для выполнения перемещения ходовой балки манипулятора на величину I поступает на вход микропроцессора 2 от системы управления робота. В микропроцессоре 2 и цифроаналоговом преобразователе 3 формируются управляющие сигналы, которые через усилитель мощности 4 подаются на входы линейного двигателя 7, перемещающего ходовую балку 11 на соответствующую величину I. Согласно блок-схеме сигнал обратной связи от датчика положения 8, передается на сравнение с управляющим сигналом цифроаналогового преобразователя 3, разность сигналов вновь поступает на вход усилителя 4 до полной отработки величины I. Кроме того, сигнал обратной связи от датчика положения 8 передается также через аналого-цифровой двухканальный преобразователь 5 в микропроцессор 2, в котором, при необходимости, производится вычисление по величине сигнала обратной связи действительного значения величины текущего положения ходовой балки манипулятора и сравнивается с величиной сигнала от системы управления робота. Таким образом, использование
микропроцессора, может повысить эффективность управления. Помимо обратной связи по положению, в блок-схеме имеется обратная связь по ускорению ходовой балки манипулятора. Сигнал отдатчика ускорения
9 через аналого-цифровой преобразователь 5 поступает в микропроцессор 2, в котором используется для вычисления
1. Усилий, приложенных к ходовой балке. Если ускорение по направлению совпадает с направлением заданного движения РдВ - Рнагр та), а также при а О (Рдв Рнагр), то в микропроцессоре 2 и цифроаналоговом преобразователе 3, соответственно
рассчитываются и формируются напряжения для поддержания скоростей и ускорений ходовой балки для заданного перемещения. В случае не совпадения направления ускорения с направлением заданного движения (Рнагр - Рдв та), то в микропроцессоре 2 и цифроаналоговом преобразователе 3, рассчитываются и формируются управляющие напряжения для мгновенного восстановления движения в
заданном направлении ходовой балки 11с компенсацией положения при помощи позиционной обратной связи. Этот случай может возникнуть в электроприводе с допустимой неуравновешенностью Дт при
превышении величины внешних возмущающих сил над расчетной, с учетом которой проводилась технологическая операция уравновешивания подвижных звеньев манипулятора. Кроме того, схват манипулятора может взять груз весом превышающим допустимую норму для данного уравновешенного электропривода, т.е. присоединив дополнительную массу, нарушить характеристики уравновешивания в сторону увеличения А т, что при допустимых величинах внешних возмущающих сил может привести к несовпадению направления ускорения подвижных звеньев манипулятора с направлением заданного перемещения. Управление электроприводом предложенным способом позволяет сглаживать воздействие внешних возмущающих сил помимо уравновешивания, формировать адаптивный способ управления манипулятором, расширяя его функциональные возможности.
2. Усредненных скоростей движения ходовой балки для более плавного перемещения в заданную позицию.
Поступательно движущиеся звенья электромеханического модуля манипулятора - подвижный якорь 14с ходовой балкой 11с одной стороны и подвижный якорь 15с другой стороны, являющиеся независимыми ветвями поступательной кинематиче- ской передачи, могут быть уравновешены с допустимой погрешностью Am в соответствии с известной методикой. Как правило, уравновешивание звеньев улучшает динамические характеристики линейного элект- ропривода, повышает точность работы манипулятора на наклонах, качках, вибрациях и ударах. Предложенный способ и устройство для его реализации позволяет дополнить эффект уравновешивания звень- ев манипулятора и значительно улучшить его динамические характеристики с появлением нового качества - возможности перемещения грузов с весом, превышающим допустимую норму для данного уравновешенного электропривода.
Формула изобретения Устройство управления манипулятором содержащее блок формирования управляющих сигналов, включающий вычислительный блок, цифроаналоговый и аналого-цифровой преобразователи, усилитель мощности и схему сравнения, уравновешенный линейный электродвигатель, включающий индукторы и якоря, и датчик обратной связи, отличающееся тем, что, с целью повышения точности и надежности в работе, индукторы смонтироЁаны в корпусе неподвижно и попарно на противоположных его сторонах а соответствующие индукторам подвижные якоря содержат расположенные параллельно магнитопро- воду зубчатые рейки, кинематически связывающие якоря каждой пары с зубчатым колесом, установленным на корпусе, при этом якорь каждой пары неподвижно соединен с ходовой балкой и уравновешен со вторым якорем этой пары, а на валу зубчатого колеса установлены датчики углового положения и ускорения, причем выход датчика углового ускорения посредством аналого- цифрового преобразователя соединен с вычислительным блоком.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Система программного управления инерционным вибропресс-молотом | 1986 |
|
SU1366271A1 |
| Адаптивная система программного управления инерционным вибропресс-молотом | 1989 |
|
SU1687351A1 |
| Портальный манипулятор | 1982 |
|
SU1139622A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006145C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
Использование: в манипуляционных системах. Сущность изобретения: в устройстве, включающее устройство формирования управляющих сигналов и электромеханический модуль, индукторы линейного электродвигателя, смонтированные в корпусе неподвижно и попарно на противоположных его сторонах. Соответствующие индукторам подвижные якоря имеют вдоль магнитопровода зубчатые рейки, при помощи которых якоря каждой пары кинематически связаны с зубчатым колесом, смонтированным на корпусе. Один якорь каждой пары неподвижно соединен с ходовой балкой и уравновешен со вторым якорем этой пары, на валу зубчатого колеса смонтированы датчики углового положения и ускорения, выход датчика углового ускорения через аналого-цифровой преобразователь соединен с микропроцессором. 3 ил.
Фе/е. 1
фиг. 2
f/J////7
127 o ±1
Т
Iff 13 // if6
//
Фаг. J
| Графопостроитель | 1975 |
|
SU553451A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
