Изобретение относится к ракетной технике, в частности к управляемым ракетам, выполненным по нормальной аэродинамической схеме с плоскими дифференциальными аэродинамическими рулями и используемым в широком диапазоне скоростей полета.
Известны ракеты, выполненные по нормальной аэродинамической схеме с плоскими аэродинамическими рулями, которые широко используются и описаны в различных источниках информации, см., например, "Зарубежное военное обозрение" №3,1983, №10, 1986 (ракеты США серии "Maverick"), патент RU № 2117907, МПК7 F 42 B 15/00, F 02 K 7/18 С1, 1998.08.02, патент RU № 2234667, МПК7 F 42 B 15/00 С1, 2002.11.18, "Динамика полета беспилотных летательных аппаратов" А.А.Лебедев, Л.С.Чернобровкин, Москва, Машиностроение, 1973, стр.44-45, 53-55, "Аэродинамика ракет" под общей ред. проф. Н.Ф. Краснова, Москва, Высшая школа, 1968, стр.71-72, рис.II-4-1 (е).
Такие ракеты с нормальной аэродинамической схемой содержат двигательную установку, систему наведения и систему управления с неподвижными крыльями и плоскими аэродинамическими рулями. Подробное описание вариантов расположения крыльев и плоских аэродинамических рулей имеет место в упомянутых ранее книгах "Аэродинамика ракет" стр.60-61 и "Динамика полета беспилотных летательных аппаратов" стр. 45 и 53-55. Из указанных источников информации в общем случае следует, что количество неподвижных крыльев может не совпадать с количеством плоских аэродинамических рулей и они могут лежать в различных плоскостях, при этом их расположение относительно продольной оси корпуса ракеты также весьма разнообразно: равномерное, симметричное, несимметричное. Особо следует выделить две основные схемы: "+" /плюс/-образную и "х" /икс/-образную, или "крестообразную" схему, см. указанную ранее книгу "Аэродинамика ракет", соответственно стр.60, рис.II-2-9 (и, з) и стр.61, рис.II-2-10 (а, и), при этом четыре неподвижных крыла и четыре ПАР располагаются симметрично относительно продольной оси корпуса ракеты; для определенности отметим, что под нормальной аэродинамической схемой понимается размещение плоских аэродинамических рулей сзади относительно крыльев по направлению полета - см. там же стр.71-72, рис.II-4-1(е).
Совокупность признаков указанных технических решений (аналогов), совпадающих с существенными признаками заявленного изобретения, одинакова за исключением количества неподвижных крыльев, плоских аэродинамических рулей и их взаимного расположения, которые, как будет показано ниже, не влияют на достигаемый изобретением технический результат. В качестве прототипа выбрано последнее указанное техническое решение из перечисленных аналогов («Аэродинамика ракет», под общ. ред. проф. Н.Ф. Краснова, Москва, Высшая школа, 1968, стр. 71-72, рис.II-4-1(е), случай компоновки ракеты по нормальной аэродинамической схеме).
Общим недостатком указанных выше технических решений, в том числе и прототипа, является их недостаточная маневренность, особенно при дозвуковых и околозвуковых скоростях полета.
Задачей, на решение которой направлено данное изобретение, является устранение недостатка прототипа, а именно повышение маневренности ракеты, особенно при до- и околозвуковых скоростях.
Указанная задача решается за счет того, что предложена ракета с нормальной аэродинамической схемой, содержащая корпус, двигательную установку, систему наведения и систему управления с неподвижными крыльями и плоскими аэродинамическими рулями, причем плоские аэродинамические рули выполнены дифференциальными, а на корпусе ракеты закреплены предрулевые стабилизаторы, плоскости которых совпадают с соответствующими плоскостями плоских дифференциальных аэродинамических рулей, при этом количество предрулевых стабилизаторов равно количеству плоских дифференциальных аэродинамических рулей, где предрулевые стабилизаторы и плоские дифференциальные аэродинамические рули выполнены таким образом, что имеют место следующие соотношения размеров:



где  - относительная площадь предрулевого стабилизатора;
- относительная площадь предрулевого стабилизатора;
SПС - площадь предрулевого стабилизатора, м2;
SРЛ - площадь плоского дифференциального аэродинамического руля, м2;
 - относительный размах предрулевого стабилизатора;
- относительный размах предрулевого стабилизатора;
LПС - размах предрулевого стабилизатора, м;
LРЛ - размах плоского дифференциального аэродинамического руля, м;
 - относительный зазор между задней кромкой предрулевого стабилизатора и передней кромкой плоского дифференциального аэродинамического руля;
- относительный зазор между задней кромкой предрулевого стабилизатора и передней кромкой плоского дифференциального аэродинамического руля;
δПС - зазор между задней кромкой предрулевого стабилизатора и передней кромкой плоского дифференциального аэродинамического руля, м.
В частности, в конкретных формах выполнения изобретения отдельные его признаки характеризуются в следующем виде: величина размаха предрулевых стабилизаторов LПС равна величине размаха плоских дифференциальных аэродинамических рулей LРЛ, а значение стреловидности по передней кромке предрулевого стабилизатора χ0пс находится в интервале 39°-54°. Ракета содержит четыре неподвижных крыла, четыре предрулевых стабилизатора и четыре плоских дифференциальных аэродинамических руля, плоскости которых совпадают с соответствующими плоскостями четырех неподвижных крыльев и расположены на корпусе плюс-образно; ракета содержит четыре неподвижных крыла, четыре предрулевых стабилизатора и четыре плоских дифференциальных аэродинамических руля, плоскости которых совпадают с соответствующими плоскостями четырех неподвижных крыльев и расположены на корпусе икс-образно; ракета содержит гаргрот - п.п.2-4 формулы соответственно.
Технический результат выражается в повышении маневренных свойств ракеты, особенно на дозвуковых и околозвуковых скоростях полета без существенного изменения аэродинамической компоновки ракеты за счет расширения диапазона балансировочных углов атаки ракеты и диапазона располагаемых перегрузок в сторону их увеличения.
При введении в ракету с нормальной аэродинамической схемой предрулевых стабилизаторов, плоскости которых совпадают с соответствующими плоскостями плоских дифференциальных аэродинамических рулей, и которые выполнены таким образом, что имеют указанные выше соотношения размеров, происходит улучшение маневренных свойств ракеты, особенно на дозвуковых и околозвуковых скоростях полета без существенного изменения аэродинамической компоновки ракеты за счет расширения диапазона балансировочных углов атаки ракеты и диапазона располагаемых перегрузок в сторону их увеличения. Этому способствуют такие факторы, как увеличение эффективности плоских дифференциальных аэродинамических рулей при больших углах атаки и больших углах отклонения дифференциальных плоских аэродинамических рулей за счет уменьшения реальных углов атаки и скольжения плоских дифференциальных аэродинамических рулей, что затягивает наступление срыва потока с поверхности плоских дифференциальных аэродинамических рулей, находящихся в зоне скосов от предрулевых стабилизаторов, а также увеличение статической устойчивости ракеты за счет того, что при указанных выше величинах зазоров между предрулевыми стабилизаторами и плоскими дифференциальными аэродинамическими рулями последние работают как единая стабилизирующая поверхность.
Перечисленные факты приводят к улучшению аэродинамических характеристик ракеты во всем скоростном диапазоне ее применения и, тем самым, расширяют диапазон ее тактического применения и повышают вероятность поражения цели.
На фиг.1 изображен общий вид предлагаемой ракеты;
на фиг.2 - вид ракеты спереди по п.п.4-5 формулы;
на фиг.3 - чертеж предрулевого стабилизатора и плоского дифференциального аэродинамического руля, где обозначены: bбпс - бортовая хорда предрулевого стабилизатора; bКпс - концевая хорда предрулевого стабилизатора; Lрл - размах плоского дифференциального аэродинамического руля; Lпс - размах предрулевого стабилизатора; χ0пс - стреловидность по передней кромке предрулевого стабилизатора;
на фиг.4 приведено графическое изображение зависимостей балансировочных углов атаки αбал ракеты от скорости ее полета Vp: кривая 1 - с предрулевым стабилизатором, кривая 2 - без предрулевого стабилизатора;
на фиг.5 - графическое изображение зависимостей балансировочного коэффициента нормальной силы Субал ракеты от скорости ее полета Vp: кривая 1 - с предрулевым стабилизатором, кривая 2 - без предрулевого стабилизатора.
Ракета с нормальной аэродинамической схемой содержит корпус 1, двигательную установку и систему наведения (на чертежах не показаны). Ракета также содержит систему управления с установленными на корпусе 1 неподвижными крыльями 2 и плоскими дифференциальными аэродинамическими рулями 3. На корпусе 1 закреплены также предрулевые стабилизаторы 4, плоскости которых совпадают с соответствующими плоскостями плоских дифференциальных аэродинамических рулей 3, при этом количество предрулевых стабилизаторов 4 равно количеству плоских дифференциальных аэродинамических рулей 3. На корпусе 1 установлен также гаргрот 5.
Дифференциальными или дифференциально отклоняемыми называются рули, отклонение которых происходит независимо друг от друга как для управления и стабилизации ракеты по основным каналам, так и для стабилизации ее по каналу крена. Они известны - см., например, П.М.Афонин, И.С.Голубев и др. «Беспилотные летательные аппараты». Машиностроение, Москва, 1967, стр.131-135 или журнал «Военный парад», Москва, Издательский дом «Военный Парад», 1998, №10, статья Г. Соколовского «Ракеты класса «Воздух-воздух», стр.15.
Устройство работает следующим образом. По сигналам управления, поступающим на плоские дифференциальные аэродинамические рули 3, ракета осуществляет необходимый маневр согласно заданной программе полета. При этом, как было сказано выше, за счет расширения диапазона балансировочных углов атаки и диапазона располагаемых перегрузок в сторону их увеличения происходит повышение маневренности ракеты, которое значительнее проявляется на дозвуковых и околозвуковых скоростях ее полета. Этому способствует увеличение эффективности плоских дифференциальных аэродинамических рулей 3 на больших углах атаки при больших углах отклонения плоских дифференциальных аэродинамических рулей 3 за счет уменьшения реальных углов атаки и скольжения плоских дифференциальных аэродинамических рулей 3, находящихся в зоне скосов от предрулевых стабилизаторов 4 и увеличение статической устойчивости ракеты за счет того, что при указанных выше величинах зазоров между предрулевыми стабилизаторами 4 и плоскими дифференциальными аэродинамическими рулями 3, последние работают как единая стабилизирующая поверхность.
На фиг.4 приведено графическое изображение зависимостей балансировочных углов атаки αбал ракеты от скорости ее полета Vp: с предрулевым стабилизатором - кривая 1, без предрулевого стабилизатора - кривая 2, иллюстрирующие указанное ранее расширение диапазона балансировочных углов атаки ракеты αбал.
На фиг.5 приведено графическое изображение зависимостей балансировочного коэффициента нормальной силы Субал ракеты от скорости ее полета Vp: с предрулевым стабилизатором - кривая 1, без предрулевого стабилизатора - кривая 2, откуда также однозначно следует указанное выше расширение диапазона располагаемой перегрузки ракеты в сторону ее увеличения.
Гаргрот представляет собой выступающий продольный обтекатель, расположенный в нижней части корпуса ракеты с проходящими внутри него трубопроводами и электрическими жгутами, см., например, "Авиационный портал 2004" - сайт в Интернете от 31.01.2005 - http://aviationz.narod.ru/vo/2/k-5.htm/ и широко используется в ракетостроении.
Таким образом, предложенная ракета обеспечивает повышенную маневренность за счет улучшения аэродинамических характеристик во всем скоростном диапазоне применения, расширяя диапазон ее тактического применения и повышая вероятность поражения цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА | 2005 |
|
RU2276321C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| РАКЕТА | 2004 |
|
RU2270413C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2007 |
|
RU2341762C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| РАКЕТА | 1996 |
|
RU2094748C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 2014 |
|
RU2546740C1 |
| РАКЕТА | 2019 |
|
RU2722329C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288435C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
Изобретение относится к области вооружения. Ракета содержит корпус, двигательную установку, систему наведения и систему управления с неподвижными крыльями и плоскими аэродинамическими рулями. Плоские аэродинамические рули выполнены дифференциальными. На корпусе ракеты закреплены предрулевые стабилизаторы, плоскости которых совпадают с соответствующими плоскостями плоских дифференциальных аэродинамических рулей. Количество предрулевых стабилизаторов равно количеству плоских дифференциальных аэродинамических рулей. Предрулевые стабилизаторы и плоские дифференциальные аэродинамические рули выполнены с определенным соотношением размеров. При использовании изобретения повышается маневренность ракеты при до- и околозвуковых скоростях. 4 з.п. ф-лы, 5 ил.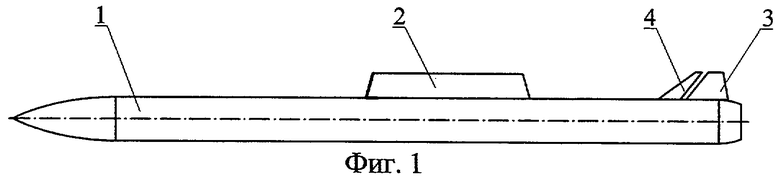



где  - относительная площадь предрулевого стабилизатора;
- относительная площадь предрулевого стабилизатора;
Sпс - площадь предрулевого стабилизатора, м2;
Sрл - площадь плоского дифференциального аэродинамического руля, м2;
 - относительный размах предрулевого стабилизатора;
- относительный размах предрулевого стабилизатора;
Lпс - размах предрулевого стабилизатора, м;
Lрл - размах плоского дифференциального аэродинамического руля, м;
 - относительный зазор между задней кромкой предрулевого стабилизатора и передней кромкой плоского дифференциального аэродинамического руля;
- относительный зазор между задней кромкой предрулевого стабилизатора и передней кромкой плоского дифференциального аэродинамического руля;
δпс - зазор между задней кромкой предрулевого стабилизатора и передней кромкой плоского дифференциального аэродинамического руля, м.
| КРАСНОВ Н.Ф | |||
| Аэродинамика ракет | |||
| - М.: Высшая школа, 1968 | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| РАКЕТА | 1996 |
|
RU2094748C1 |
| БИКАЛИБЕРНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 1996 |
|
RU2114382C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для ослабления силы удара при столкновениях поездов | 1923 |
|
SU1257A1 |
| БЕГОВОЕ КОЛЕСО | 1919 |
|
SU3063A1 |

