Изобретение относится к устройствам для строительства и ремонта железнодорожного пути и может быть использовано, в частности, при постановке пути в проектное положение.
Система для управления выправкой железнодорожного пути, принятая в качестве прототипа, содержит: путевую машину, состоящую из рамы, опирающуюся на ходовые тележки, смонтированные на раме устройства для измерения стрел изгиба пути в плане и/или продольном профиле и/или возвышения одного рельса относительно другого, включающие в себя соответствующие измерительные базы и датчики; выправочное устройство, включающее в себя приводы и соединенное с устройством для управления выправкой пути; устройство для управления выправкой пути, соединенное с указанными устройствами для измерения, которое состоит из вычислительного блока, датчика пути, блока ввода априорной информации и блока сравнения, причем вычислительный блок выполнен с возможностью определения величин смещений пути относительно неподвижных координат, определяющих положение пути в пространстве; входы вычислительного блока и блока сравнения соединены с выходами датчика пути и блока ввода априорной информации через переключатель для избирательного соединения их с соответствующим блоком, а выходы - с другими входами блока сравнения, выходы которого соединены с соответствующими приводами исполнительного органа для выправки пути (RU 2098538, Е01В 29/04, 10.12.97).
Известная система обеспечивает выправку длинных неровностей с повышенной плавностью, не зависящей от исходного положения пути, с учетом фактического положения пути в кривых участках и переломах продольного профиля, обеспечивая установку начала и конца переходных кривых в зависимости от технологических требований по проекту или с привязкой к фактическому положению пути.
К недостаткам известной системы для управления выправкой железнодорожного пути следует отнести использование в ней относительной системы измерения геометрии пути, основанной на измерениях стрел изгиба пути хордовым методом. На больших расстояниях такая система измерений дает существенные погрешности, приводящие к возникновению длинных неровностей в плане и профиле пути, то есть неровностей, длина которых больше длины базы путевыправочной машины. При использовании относительной системы измерений проект выполняется в адаптированном виде, в котором указываются линейные координаты начала и конца кривых и параметры кривых. В условиях неточности работы используемого датчика пути, основанной на проскальзывании ролика относительно рельса, а также разности длин внешней и внутренней рельсовых нитей на кривых, исполненная геометрия пути отклоняется от проектной, а отсутствие средств координатной привязки приводит к нарушению габаритов пути относительно других путей (если они есть), балластной призмы и объектов инфраструктуры.
Относительные методы выправки не используют в исходном виде проектные данные, содержащие взаимное расположение железнодорожного пути и иных объектов инфраструктуры. При постановке пути в проектное положение после замены рельсошпальной решетки и балласта эти методы неэффективны, так как не существует надежных средств контроля местоположения в пространстве в реальном масштабе времени.
Технический результат изобретения заключается в повышении точности положения железнодорожного пути относительно проектного с обеспечением правильного расположения пути относительно полотна дороги и объектов инфраструктуры.
Технический результат достигается тем, что в систему для управления выправкой железнодорожного пути, содержащую путевую машину, рама которой опирается на ходовые тележки, и смонтированное на раме устройство для выправки железнодорожного пути, включающее в себя подъемно-рихтовочное устройство с блоком управления и измерительную тележку, определяющую положение оси пути и вычислительный блок, с подключенными к нему блоком памяти и блоком отображения информации, согласно изобретению введены мобильная референцная станция, спутниковая система позиционирования, размещенная на путевой машине, на крыше которой установлены антенна спутниковой системы позиционирования и датчик угла наклона, соединенный с вычислительным блоком, к которому подключены выход приемника спутниковой системы позиционирования и устройство определения пространственного положения измерительной тележки относительно антенны, размещенное под рамой путевой машины, мобильная референцная станция и спутниковая система позиционирования соединены между собой каналом связи посредством установленных на них радиомодемов, а в блок памяти записана электронная модель проекта положения пути в трехмерной пространственной системе координат.
На чертеже представлена функциональная схема системы для управления выправкой железнодорожного пути.
Система для управления выправкой железнодорожного пути содержит мобильную референцную станцию 1, размещенный на путевой машине вычислительный блок 2, с подключенными к нему блоком 3 памяти и блоком 4 отображения информации, спутниковая система 5 позиционирования, размещенная на путевой машине, на крыше которой установлены антенна 6 спутниковой системы позиционирования и датчик 7 угла наклона, соединенный с вычислительным блоком 2, к которому подключены выход приемника спутниковой системы 5 позиционирования и устройство 8 определения пространственного положения измерительной тележки 9, размещенное под рамой путевой машины, мобильная референцная станция 1 и спутниковая система 5 позиционирования соединены между собой каналом 10 связи посредством установленных на них радиомодемов 11 и 12, а в блок 3 памяти записана электронная модель проекта положения пути в трехмерной пространственной системе координат.
Система для управления выправкой железнодорожного пути работает следующим образом.
Функционирование системы основано на использовании пространственных систем координат. Местоположение измерительной тележки путевой машины определяется в реальном масштабе времени не относительно базы машины, а относительно трехмерной пространственной системы координат. Поскольку электронная модель проекта положения пути записана в блоке 3 памяти в той же системе координат, в каждый момент времени вычислительный блок 2 производит расчет смещения текущего положения пути в плане и профиле относительно проектного, а оператор машины на экране блока 4 отображения информации видит величины этих смещений и посредством блока 13 управления воздействует на управляющие механизмы путевой машины (подъемно-рихтовочного устройства) и стремится свести эти смещения к нулю, приводя тем самым геометрию пути к проектной. Если необходимые величины изгиба превышают возможности машины, то приведение положения пути к проектному производится в несколько проходов. Подтвержденная точность постановки пути составляет 3 см и является постоянной по всей длине участка ремонта. Для окончательной выправки пути необходимо на последнем этапе использовать какой-либо из существующих методов сглаживания, работающих в относительных координатах. При этом путь остается в проектном положении, но его геометрия становится более монотонной с меньшими отклонениями от проектной линии на малых расстояниях.
Перед началом работы системы в блок 3 памяти вычислительного блока 2 заносятся исходные данные - электронная модель проекта положения пути. Референцная станция 1 устанавливается на одну из точек с известными координатами, используемую при подготовке проекта в качестве реперной. Связь между референцной станцией 1 и приемником спутниковой системы 5 позиционирования осуществляется по каналу 10 связи посредством установленных на них радиомодемов 11 и 12.
Уточненные координаты вырабатываются совместно приемником и референцной станцией и указывают местоположение фазового центра антенны 6, находящейся на крыше путевой машины. Поэтому необходимо определять пространственный вектор смещения измерительной тележки 9 относительно антенны 6. Для этого используются промеры неизменяемых величин расстояний от фазового центра антенны 6 до устройства 8 определения пространственного положения (смещения) измерительной тележки, а также показания датчиков смещения измерительной тележки относительно путевой машины, входящих в устройство 8 определения пространственного положения (смещения) измерительной тележки относительно фазового центра антенны 6 спутниковой системы 5 позиционирования. Устройство определения 8 пространственного положения измерительной тележки размещено под рамой путевой машины. Устройство предназначено для определения смещений Δl осей измерительной тележки 9 и антенны 6, а также высоты h, которая необходима для вычисления расстояния от измерительной тележки 9 до антенны 6. Величины Δl и h вычисляются по трем сторонам треугольника - одной постоянной и двум измеряемым. Кроме того, в расчете используется информация о величине крена, которая поступает в вычислительный блок 2 с датчика 7 угла наклона. Данные с приемника спутниковой системы 5 позиционирования, датчика 7 угла наклона и устройства 8 определения пространственного положения (смещения) измерительной тележки поступают на вход вычислительного блока 2, который на основании этих данных рассчитывает текущее положение пути и сравнивает его с проектным положением. Информация об отклонении текущего и проектного положения пути в плане и профиле отображается на экране блока 4 отображения информации и оператор путевой машины с помощью блока 16 управления воздействует на управляющие органы подъемно-рихтовочного устройства путевой машины с целью минимизации или полного устранения отклонения пути от проектного. Процесс происходит до момента достижения путевой машиной границы фронта работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Система и способ для определения пространственного положения и выправки железнодорожного пути, устройство лазерного измерения системы сбора данных о фактическом положении пути | 2023 |
|
RU2808852C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| СИСТЕМА ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2012 |
|
RU2519322C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
Изобретение относится к устройствам для строительства и ремонта железнодорожного пути и может быть использовано, в частности, при постановке пути в проектное положение. Система для управления выправкой железнодорожного пути содержит путевую машину, рама которой опирается на ходовые тележки. Размещенное на раме устройство для выправки пути содержит подъемно-рихтовочное устройство с блоком управления и измерительную тележку, определяющую положение оси пути. Вычислительный блок соединен с блоком памяти и блоком отображения информации. Также в систему введены мобильная референцная станция, спутниковая система позиционирования с антенной, датчик угла наклона, соединенный с вычислительным блоком, к которому подключены приемник спутниковой системы позиционирования и устройство определения пространственного положения измерительной тележки, размещенное под рамой машины. Мобильная референцная станция и спутниковая система позиционирования соединены каналом связи при помощи радиомодемов, а в блок памяти записана электронная модель проекта положения пути в трехмерной пространственной системе координат. Решение направлено на повышение точности положения пути относительно полотна дороги и объектов инфраструктуры. 1 ил.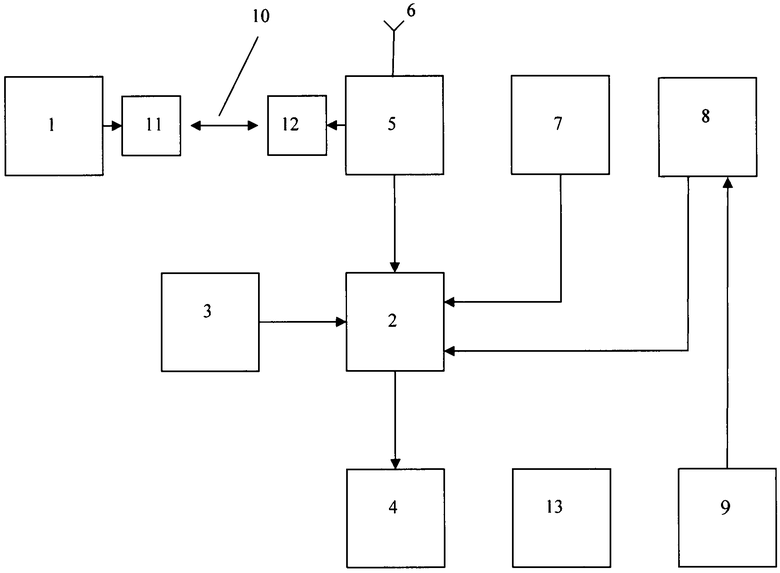
Система для управления выправкой железнодорожного пути, содержащая путевую машину, рама которой опирается на ходовые тележки, и смонтированные на раме устройство для выправки железнодорожного пути, включающее в себя подъемно-рихтовочное устройство с блоком управления и измерительную тележку, определяющую положение оси пути, и вычислительный блок с подключенными к нему блоком памяти и блоком отображения информации, отличающаяся тем, что в нее введены мобильная референцная станция, спутниковая система позиционирования, размещенная на путевой машине, на крыше которой установлены антенна спутниковой системы позиционирования и датчик угла наклона, соединенный с вычислительным блоком, к которому подключены выход приемника спутниковой системы позиционирования и устройство определения пространственного положения измерительной тележки, размещенное под рамой путевой машины, мобильная референцная станция и спутниковая система позиционирования соединены между собой каналом связи посредством установленных на них радиомодемов, а в блок памяти записана электронная модель проекта положения пути в трехмерной пространственной системе координат.
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| US 2002078853 A1, 27.06.2002 | |||
| AU 1904597 A, 30.10.1997 | |||
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |

