Изобретения относятся к способам, используемым при строительстве и ремонте железнодорожного пути, и устройствам, предназначенным для строительства и ремонта железнодорожного пути, в частности к способам выправки железнодорожного пути, устройствам для выправки железнодорожного пути и машинам для выправки железнодорожного пути.
Известен способ выправки железнодорожного пути, заключающийся в том, что измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню, рассчитывают величины сдвижек и подъемок рельсовых нитей и циклично выправляют железнодорожный путь в соответствии с величинами сдвижек и подъемок рельсовых нитей ("Машина выправочно-подбивочно-рихтовочная ВПР-02", техническое описание и инструкция по эксплуатации, М.: Транспорт, 1995 г., стр.11-12; 81-92).
Известно устройство для выправки железнодорожного пути, содержащее монтируемые на путевой машине подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере три измерительные тележки, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с устройством управления подъемно-рихтовочным устройством датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня и датчики стрел изгиба рельсовых нитей в плане ("Машина выправочно-подбивочно-рихтовочная ВПР-02", техническое описание и инструкция по эксплуатации, М.: Транспорт, 1995 г., стр.9-12; 76-78; 81-92).
Известна машина для выправки железнодорожного пути, содержащая раму, опирающуюся на ходовые тележки, смонтированные на раме подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере три измерительные тележки, установленные на раме с возможностью подъема приводами, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с устройством управления подъемно-рихтовочным устройством датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня и датчики стрел изгиба рельсовых нитей в плане ("Машина выправочно-подбивочно-рихтовочная ВПР-02", техническое описание и инструкция по эксплуатации, М.: Транспорт, 1995 г., стр.9-12; 50-63; 76-78; 81-92).
Известные способ и машина не обеспечивают качественную выправку железнодорожного пути, поскольку устройство для выправки железнодорожного пути не обеспечивает измерение положения выправленного пути в процессе работы машины для выправки пути, не выполняет корректировку выправки железнодорожного пути в процессе работы машины с учетом релаксации пути, возможных ошибок подъемно-рихтовочных устройств, реальных условий работы машины для выправки пути и пр., то есть не обеспечивается отрицательная обратная связь от уже выправленного пути на процесс последующей выправки, и для определения положения железнодорожного пути после работы машины необходим дополнительный измерительный проход машины по выправленному участку пути.
Техническим результатом изобретений является повышение точности выправки железнодорожного пути за счет исключения влияния ошибок, связанных с точностью отработки заданных величин сдвижек (подъемок) пути исполнительным органом (подъемно-рихтовочным устройством) машины, релаксацией пути, исключение дополнительного измерительного прохода машины для выправки железнодорожного пути или устройства для контроля выправки железнодорожного пути по выправленному пути с целью определения положения пути после работы устройства или машины для выправки пути.
Для достижения этого технического результата в способе выправки железнодорожного пути, заключающемся в том, что измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню, рассчитывают величины сдвижек и подъемок рельсовых нитей и циклично выправляют железнодорожный путь в соответствии с величинами сдвижек и подъемок рельсовых нитей, перед каждым циклом выправки пути измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню в зоне выправки пути и на выправленном пути, корректируют расчетные величины сдвижки и подъемки рельсовых нитей с учетом этих измерений и затем выправляют железнодорожный путь в соответствии с этими скорректированными величинами, при этом после завершения каждого цикла выправки пути измеряют стрелу изгиба рельсовых нитей в плане, стрелу прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню в зоне выправки пути и на выправленном пути и измеряют микроуклон пути в зоне выправленного пути, затем при необходимости повторно осуществляют выправку пути в данном цикле его выправки или учитывают эти стрелы, положение рельсовых нитей по уровню и микроуклон пути при следующем цикле выправки пути.
Кроме этого, регистрируют положение выправленного железнодорожного пути после завершения каждого цикла его выправки.
Для достижения этого технического результата устройство для выправки железнодорожного пути, содержащее монтируемые на путевой машине подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере три измерительные тележки, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с устройством управления подъемно-рихтовочным устройством датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня и датчики стрел изгиба рельсовых нитей в плане, снабжено датчиком уклона, размещаемым в зоне выправленного пути и имеющим возможность измерения микроуклонов пути в продольном профиле, при этом датчик уклона соединен с устройством управления подъемно-рихтовочным устройством, представляющим собой компьютер.
Для достижения этого технического результата машина для выправки железнодорожного пути, содержащая раму, опирающуюся на ходовые тележки, смонтированные на раме подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере три измерительные тележки, установленные на раме с возможностью подъема приводами, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с устройством управления подъемно-рихтовочным устройством датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня и датчики стрел изгиба рельсовых нитей в плане, снабжена датчиком уклона, размещаемым в зоне выправленного пути и имеющим возможность измерения микроуклонов пути в продольном профиле, при этом датчик уклона соединен с устройством управления подъемно-рихтовочным устройством, представляющим собой компьютер.
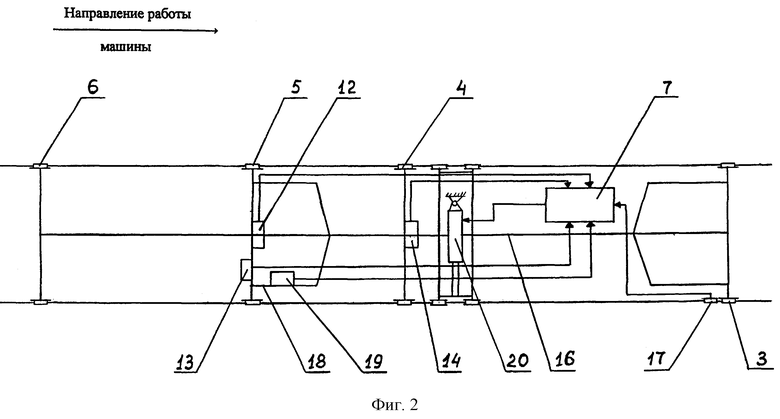
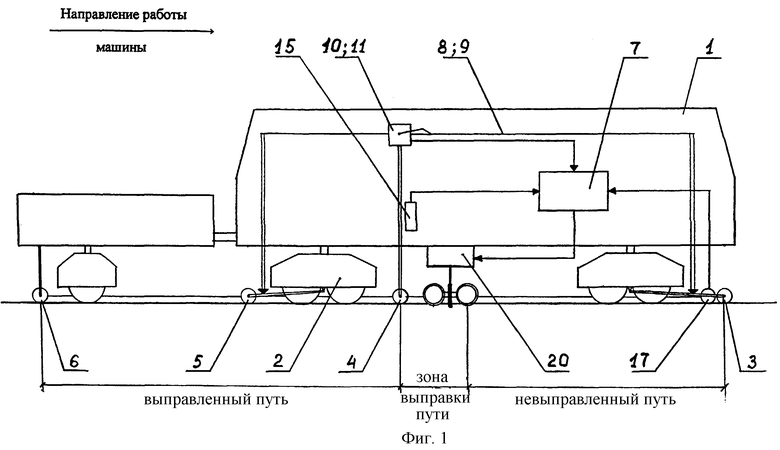
На фиг.1 схематично изображена машина для выправки железнодорожного пути с устройством для выправки железнодорожного пути, общий вид. На фиг.2 - вид сверху на измерительные тележки устройства для выправки железнодорожного пути.
Машина 1 для выправки (и подбивки) железнодорожного пути содержит раму, опирающуюся на ходовые тележки, одна из которых (тележка 2) выполнена бегунковой. Бегунковая тележка 2 по сравнению с другой ходовой тележкой (тяговой), например, не имеет осевого редуктора на одной колесной паре и над обеими осями этой тележки установлены опорные цилиндры блокировки буксовой подвески. На раме машины 1 (выправочно-подбивочно-рихтовочной машины или другой путевой машины) смонтировано устройство для выправки железнодорожного пути, содержащее подъемно-рихтовочное устройство 20, контрольно-измерительное устройство, включающее в себя переднюю измерительную тележку 3, средние измерительные тележки 4 и 5, заднюю измерительную тележку 6, и компьютер 7, управляющий подъемно-рихтовочным устройством 20. Измерительные тележки 3, 4, 5 и 6 установлены на раме машины 1 с возможностью подъема и опускания приводами (для установки в рабочее или транспортное положение). Тележка 3 в процессе работы машины 1 перемещается по невыправленному пути (размещается в зоне невыправленного пути), тележка 4 расположена вблизи подъемно-рихтовочного устройства 20 в зоне выправки пути (при работе машины), а тележки 5 и 6 в процессе работы машины 1 перемещаются по выправленному пути (размещаются в зоне выправленного пути). Между тележками 3 и 5 натянуты тросы 8 и 9, расположенные с обеих сторон продольной оси машины 1 или устройства для выправки железнодорожного пути и размещаемые над рельсовыми нитями пути. Относительно тросов 8 и 9 измеряют стрелы прогиба рельсовых нитей (рельсошпальной решетки, пути) в продольном профиле при помощи датчиков 10 и 11 стрел прогиба рельсовых нитей (рельсошпальной решетки, пути) в продольном профиле, установленных на тележке 4. На тележке 4 установлен также датчик 15 уровня. На тележке 5 установлен датчик 13 уровня. Датчики 13 и 15 уровня предназначены для измерения положения пути (рельсовых нитей, рельсошпальной решетки) по уровню.
Между тележками 3 и 6 натянут трос 16, относительно которого измеряют стрелы изгиба рельсовых нитей (рельсошпальной решетки, пути) в плане при помощи датчиков 14 и 12 стрел изгиба рельсовых нитей (рельсошпальной решетки, пути) в плане, установленных соответственно на тележках 4 и 5.
Измерительная тележка 5 и бегунковая тележка 2 соединены тягой 18, шарнирно закрепленной на тележке 2. На тяге 18 установлен датчик 19 уклона. Датчик 19 уклона может быть установлен непосредственно на измерительной тележке 5. Таким образом, датчик 19 уклона должен располагаться в зоне выправленного пути.
На тележке 3 смонтирован датчик 17 пройденного пути. Датчик 17 может быть установлен на любой другой измерительной тележке или в любом другом месте машины 1 для выправки железнодорожного пути или устройства для выправки железнодорожного пути.
Тросы 8, 9 и 16, датчики 13 и 15 уровня, датчики 10 и 11 стрел прогиба рельсовых нитей в продольном профиле, датчики 12 и 14 стрел изгиба рельсовых нитей в плане, датчик 19 уклона и датчик 17 пройденного пути входят в состав контрольно-измерительного устройства.
На тележке 5 может быть установлен датчик стрел прогиба рельсовых нитей в продольном профиле для измерения стрел прогиба пути в продольном профиле от троса 16.
Датчик 12 стрел изгиба рельсовых нитей в плане, расположенный в зоне выправленного пути, датчик 14 стрел изгиба рельсовых нитей в плане, размещаемый в зоне выправки пути, датчик 19 уклона, датчики 13 и 15 уровня, датчики 10 и 11 стрел прогиба рельсовых нитей в продольном профиле и датчик 17 пройденного пути соединены с компьютером 7. В случае установки на тележке 5 датчика стрел прогиба рельсовых нитей в продольном профиле от троса 16 этот датчик также соединяют с компьютером 7.
Подъемно-рихтовочное устройство (ПРУ) 20 установлено на раме машины 1 и соединено с компьютером 7, управляющим этим устройством 20.
Компьютер 7 является устройством управления подъемно-рихтовочным устройством 20, обеспечивающим выправку железнодорожного пути (перемещение рельсошпальной решетки в горизонтальной и вертикальной плоскостях).
Устройство для выправки железнодорожного пути одновременно осуществляет контроль (регистрацию) выправленного положения пути с учетом скорректированных значений измеренного положения выправленного пути, то есть непосредственно в процессе рабочего прохода машины с обеспечением выправки и подбивки пути осуществляется измерение выправленного положения пути для дальнейшего использования этой информации, например для оценки выправленного положения пути (без дополнительной измерительной поездки машины или контрольно-измерительного устройства), для оценки качества работы машины для выправки пути.
Для обеспечения выправки и контроля положения пути после его выправки в трех координатах в процессе рабочего прохода машины 1 необходимо предварительно (до работы машины) произвести измерительную поездку или иметь информацию о положении пути до выправки, полученную тем или иным образом до работы машины (для этого измеряют стрелы изгиба и прогиба рельсовых нитей, положение железнодорожного пути по уровню), и рассчитать требуемые величины сдвижек и/или подъемок (программные стрелы) рельсовых нитей (рельсошпальной решетки, пути) подъемно-рихтовочным устройством 20.
В процессе рабочего прохода машины 1 или устройства для выправки железнодорожного пути во время первого цикла работы по выправке железнодорожного пути компьютер 7 считывает информацию с датчика 14 стрел изгиба рельсовых нитей в плане, установленного на тележке 4, размещенной в зоне выправки пути, сравнивает результат измерения с расчетной величиной сдвига для сечения пути в месте расположения тележки 4, суммирует результат сравнения с величиной стрелы, измеренной датчиком 12 стрел изгиба рельсовых нитей в плане, установленным на тележке 5, размещенной на выправленном пути, с учетом расчетной величины сдвижки (программной стрелы) рельсовых нитей (рельсошпальной решетки, пути), определяемой для передней тележки 3 и пересчитанной для сечения пути по месту расположения тележки 5, то есть компьютер 7 корректирует расчетную величину сдвижки (программную стрелу) рельсовых нитей с учетом уже выправленного положения пути. Кроме этого, компьютер 7 учитывает криволинейную составляющую участка железнодорожного пути, на котором работает машина 1 или устройство для выправки железнодорожного пути, формирует управляющий сигнал на сдвиг рельсовых нитей подъемно-рихтовочному устройству 20, которое осуществляет сдвиг и/или подъем рельсовых нитей (выправку железнодорожного пути). После выправки пути на данном участке (в данном цикле выправки), но перед началом переезда к следующему участку пути (следующей(им) шпале(ам)) компьютер 7 запоминает положение рельсовых нитей (рельсошпальной решетки, пути) в плане, измеренное с помощью датчика 14 стрел изгиба рельсовых нитей в плане, установленного на тележке 4, размещенной в зоне выправки пути. Одновременно с этим перед началом переезда к следующему участку пути (следующей(им) шпале(ам)) компьютер 7 запоминает величину стрелы изгиба рельсовых нитей (рельсошпальной решетки, пути) в плане, повторно измеренную с помощью датчика 12 после завершения цикла выправки пути, подбивки и обжатия балласта машиной 1 или устройством для выправки железнодорожного пути с учетом расчетной величины сдвижки пути, определяемой для передней тележки 3 (передней точки измерительной системы) и пересчитанной для сечения пути по месту расположения измерительной тележки 5, размещенной на выправленном пути. Запомненная компьютером 7 величина сигнала от датчика 14 может соответствовать той величине сигнала, которая должна быть после точной выправки пути, то есть после выправки пути стрела в данном его месте равна, например, 0 (на прямолинейном участке пути), или эта величина сигнала может характеризовать недо(пере)сдвиг выправленного пути в плане в данном месте пути. Эта величина стрелы после произведенной сдвижки рельсовых нитей позволит учесть остаточный недо(пере)сдвиг пути, вызванный возможной релаксацией пути, при следующем цикле работы машины 1 или устройства для выправки железнодорожного пути. Или вместо этого для устранения этой остаточной стрелы, вызванной возможной релаксацией пути, производят повторную сдвижку рельсовых нитей (повторную выправку пути) в данном месте пути на данном цикле его выправки.
Далее при переезде машины 1 или устройства для выправки пути к следующему участку пути для его выправки и при наезде задней тележкой 6 на место измерительной тележки 5 компьютер 7 корректирует расчетную величину сдвижки рельсовых нитей (рельсошпальной решетки, пути) в месте их (ее, его) выправки подъемно-рихтовочным устройством 20 посредством пересчета предыдущего положения задней тележки 6 в дополнительную корректирующую стрелу через геометрические параметры измерительной системы и запомненной величины стрелы (сигнала) на предыдущем цикле работы машины 1 или устройства для выправки пути. Вводимая коррекция в величину сдвижки рельсовых нитей (рельсошпальной решетки, пути) позволяет учесть влияние уже выправленного положения пути через положение задней точки измерительной системы (положение задней измерительной тележки 6).
Таким образом, перед каждым циклом выправки пути в плане измеряют стрелы изгиба рельсовых нитей в плане в зоне выправки пути и на выправленном пути, корректируют расчетную величину сдвижки рельсовых нитей с учетом этих измерений и затем сдвижку рельсовых нитей производят в соответствии с этой корректировкой расчетной величины сдвижки (с учетом уже выправленного положения пути), при этом после завершения каждого цикла выправки пути в плане измеряют стрелу изгиба рельсовых нитей в плане в зоне его выправки и при необходимости повторно осуществляют сдвижку рельсовых нитей на данном участке пути или учитывают эту стрелу изгиба рельсовых нитей при следующем цикле выправки пути в плане. Кроме этого, при этой выправке пути осуществляется учет релаксации (упругой отдачи) пути, неточности расположения задней тележки 6, вызванной ошибкой отработки заданных сигналов подъемно-рихтовочным устройством 20, и других случайных факторов, что позволяет в конечном счете повысить точность выправки пути в плане (качество рихтовки пути).
Выправку пути в продольном профиле (подъемку) рельсовых нитей (рельсошпальной решетки, пути) производят на основании результатов измерения стрел прогиба рельсовых нитей в продольном профиле с помощью датчика 10 или 11 стрел прогиба рельсовых нитей в продольном профиле (в зависимости от выбранной базовой рельсовой нити) и расчетных величин подъемки рельсовых нитей, полученных по результатам измерительной поездки.
В случае необходимости (если не была реализована заданная величина подъемки пути) повторно осуществляют выправку пути в этом месте пути (в данном цикле его выправки), подбивку его и обжатие балласта или учитывают величину недоподъемки пути при следующем цикле работы машины 1 или устройства для выправки железнодорожного пути.
Одновременно с этим датчик 19 измеряет микроуклоны пути, компьютер 7 считывает информацию с датчика 19 уклона, суммирует эту величину (в определенном соотношении) с результатом измерения положения пути по уровню, полученным с помощью датчика 15 уровня, установленного на измерительной тележке 4, в сечении пути, определяемом положением бегунковой тележки 2. Из полученного результата компьютер 7 вычитает проектный (руководящий) уклон, рассчитывает путем интегрального преобразования положение выправленного пути.
Компьютер 7 в случае необходимости (если не была реализована заданная величина подъемки пути) запоминает результат недоподъемки и микроуклона пути в продольном профиле в зоне его выправленного положения (в сечении пути в зоне расположения тележки 5). Учет положения выправленного пути и введение корректировки позволит повысить качество выправки пути в продольном профиле, а измерение микроуклонов позволит определить положение пути в продольном профиле после его выправки непосредственно в процессе рабочего прохода машины.
В случае установки датчика стрел прогиба рельсовых нитей в продольном профиле на тележке 5 выправку пути в продольном профиле производят с учетом положения задней точки измерительной системы, расположенной на выправленном пути, то есть с учетом уже выправленного положения пути, при этом осуществляется учет возможных осадок пути, ошибки отработки заданных сигналов подъемно-рихтовочным устройством 20, недостаточной эффективности работы подбивочных органов и других случайных факторов, что позволяет в конечном счете повысить точность выправки пути в продольном профиле.
Рассчитывают разность запомненных величин смежных микроуклонов на базе 2,5 метра пути и рассчитывают статистические показатели плавности выправленного пути в продольном профиле по средним квадратическим отклонениям от среднего значения разностей смежных микроуклонов на базе 2,5 метра пути, сравнивают их с нормированными для машин для выправки железнодорожного пути (выправочно-подбивочно-рихтовочных) значениями.
Пересчитывают измеренные микроуклоны в стрелы прогиба рельсовых нитей (пути) в середине 10-ти метровой хорды через 5 метров и определяют отклонения от нормированных значений. Рассчитывают также статистические показатели плавности выправленного пути в продольном профиле по средним квадратическим отклонениям от среднего значения стрел прогиба рельсовых нитей (пути) от 10-ти метровой хорды через 5 метров.
Таким образом, перед каждым циклом выправки пути в продольном профиле измеряют стрелы прогиба рельсовых нитей в продольном профиле в зоне выправки пути и на выправленном пути, корректируют расчетную величину подъемки рельсовых нитей с учетом этих измерений и затем подъемку рельсовых нитей производят в соответствии с этой корректировкой расчетной величины подъемки (с учетом уже выправленного положения пути), при этом после завершения каждого цикла выправки пути в продольном профиле измеряют стрелу прогиба рельсовых нитей в продольном профиле в зоне его выправки и при необходимости повторно осуществляют подъемку рельсовых нитей на данном участке пути или учитывают эту стрелу прогиба рельсовых нитей при следующем цикле выправки пути в продольном профиле.
Выправку пути по уровню производят на основании результатов измерения положения рельсовых нитей (пути) по уровню с помощью датчика 15 уровня, установленного на измерительной тележке 4, расположенной в зоне выправки пути, и с учетом проектного (заданного) положения рельсовых нитей по уровню в этом сечении пути.
Параллельно с указанным компьютер 7 считывает информацию с датчика 13 уровня, установленного на измерительной тележке 5, расположенной за бегунковой тележкой 2 на выправленном пути, сравнивает измеренное значение с проектным (заданным) значением в этом сечении пути и запоминает измеренное значение и результат сравнения.
Затем машина 1 перемещается вдоль пути к следующему месту его выправки и начинается следующий цикл работы машины 1.
На следующем цикле работы машины 1 или устройства для выправки пути все указанные операции по измерению и вычислению величин сдвижек и/или подъемок рельсовых нитей и осуществлению сдвижек и/или подъемок рельсовых нитей подъемно-рихтовочным устройством 20 повторяются.
Если на протяжении нескольких, например двух (трех) или более, циклов работы машины 1 результат сравнения по уровню отличается от выбранной величины, например, на один миллиметр в одну и ту же сторону, то корректируют положение пути по уровню в зоне выправки на заданную величину, например на один миллиметр. Введение этих корректировок позволяет учесть ряд случайных факторов, например неравномерность выгруженного щебня с правой и левой сторон пути, неравномерность подбивки балласта с обочины и междупутья и пр., и тем самым повысить точность выправки пути по уровню.
Рассчитывают параметры положения пути по уровню с определением возвышений в прямых, круговых кривых, длин, начала (конца) и возвышения в переходных кривых. Определяют отклонения от нормированных значений в круговых, прямых и переходных кривых с привязкой к длине пути.
В процессе работы или после работы машины 1 или устройства для выправки пути на основании запомненных с помощью компьютера 7 значений формируются таблицы и графики результатов работы, которые можно записать на магнитный носитель или носитель другого типа, распечатать в дистанции пути, ПМС и использовать при необходимости для последующей выправки и подбивки пути, не производя для этого измерительной поездки.
Результаты работы по определению положения рельсовых нитей (рельсошпальной решетки, пути) в плане могут быть представлены в виде стрел изгиба рельсовых нитей (рельсошпальной решетки, пути) для симметричной хорды длиной 20 метров через 5 или 10 метров с определением радиусов круговых кривых, длин и мест начала (конца) переходных кривых, остаточных сдвигов пути через 5 или 10 метров, а также разностей смежных стрел изгиба в прямых и круговых кривых, отклонений от равномерного нарастания в переходных кривых с анализом удовлетворения нормированным значениям, используемым для оценки качества ремонта или планово-предупредительной выправки пути.
Результаты работы по определению положения рельсовых нитей (рельсошпальной решетки, пути) в продольном профиле могут быть представлены в виде отметок пути в продольном профиле относительно начала и конца работы машины 1, в виде разностей смежных микроуклонов пути на базе 2,5 метра, в виде вертикальных стрел прогиба пути через 5 метров от 10-ти метровой хорды с анализом удовлетворения нормированным значениям, используемым для оценки качества ремонта или планово-предупредительной выправки пути.
Результаты работы по определению положения рельсовых нитей (рельсошпальной решетки, пути) по уровню могут быть представлены в виде возвышений по уровню в прямых, переходных и круговых кривых с указанием длин, начала (конца) переходных (круговых) кривых с анализом удовлетворения нормированным значениям, используемым для оценки качества ремонта или планово-предупредительной выправки пути.
Способ выправки железнодорожного пути, реализуемый представленными выше устройством или машиной для выправки железнодорожного пути, заключается в следующем.
Измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню до работы машины 1 или устройства для выправки пути, если этого не было сделано после предыдущей выправки пути. Эти измерения производят при помощи устройства для выправки железнодорожного пути, установленного на машине 1 или на другом перемещаемом по железнодорожному пути транспортном средстве. Рассчитывают положение пути в пространстве относительно начала и конца участков пути, на которых должна работать машина 1, определяя при этом по результатам указанных измерений величины сдвижек рельсовых нитей в плане и подъемок их в продольном профиле. Если работа машины осуществляется в привязке к неподвижной системе координат (реперной сети), то осуществляется привязка к этой системе координат.
В процессе работы машины 1 производят подъемно-рихтовочным устройством 20 цикличную выправку пути в плане (перемещают рельсошпальную решетку в горизонтальной плоскости) с учетом уже выправленного положения пути. После каждого цикла выправки железнодорожного пути измеряют стрелу изгиба рельсовых нитей в плане при помощи датчика 14 на тележке 4, расположенной в зоне выправки пути, измеряют стрелу изгиба рельсовых нитей выправленного пути в плане при помощи датчика 12 на измерительной тележке 5, расположенной за бегунковой тележкой 2 машины 1 в зоне выправленного пути, суммируют величину этой стрелы с величиной стрелы, определяемой расчетным сдвигом пути для передней тележки 3 и пересчитанной на величину стрелы для измерительной тележки 5, учитывают криволинейную составляющую участка железнодорожного пути, на котором работает машина, затем формируют (в случае необходимости) управляющее воздействие на сдвиг рельсовых нитей (рельсошпальной решетки, пути) подъемно-рихтовочным устройством 20 для повторной выправки пути (в данном цикле его выправки) в этом же месте железнодорожного пути.
Перед началом переезда к следующей(им) шпале(ам) запоминают положение рельсовых нитей в плане, измеренное с помощью датчика 14, установленного на тележке 4, расположенной в зоне выправки пути. Далее при наезде задней тележкой 6 на место тележки 5 корректируют величину сдвижки рельсовых нитей в месте их выправки посредством пересчета положения задней тележки 6 в дополнительную корректирующую стрелу через геометрические параметры измерительной системы и запомненной величины положения рельсовых нитей в плане на предыдущем цикле работы машины 1, запоминают полученную величину стрелы выправленного пути с учетом стрелы, определяемой величиной сдвижки рельсовых нитей по передней точке, пересчитанной для измерительной тележки 5, перемещают машину 1 к следующим шпалам и начинают следующий цикл их подбивки и выправки пути.
Полученные стрелы изгиба рельсовых нитей выправленного пути в плане измерены для несимметричной хорды, поэтому пересчитывают указанные стрелы изгиба для симметричной хорды длиной 20 метров через 5 или 10 метров. Рассчитывают радиусы круговых кривых, длины и начало (конец) переходных (круговых) кривых, в привязке к метражу пути, статистические показатели плавности выправленного пути по средним квадратическим отклонениям от среднего значения разностей смежных стрел изгиба в прямых и круговых кривых и отклонений от расчетного значения в переходных кривых. Сравнивают полученные результаты расчетов с нормированными значениями, используемыми для оценки качества ремонта или планово-предупредительной выправки пути, и определяют возможные отклонения с привязкой к длине пути.
Таким образом, при каждом цикле выправки пути в плане измеряют стрелы изгиба рельсовых нитей в плане в зоне выправки пути и на выправленном пути, корректируют расчетную величину сдвижки рельсовых нитей с учетом этих измерений и затем сдвижку рельсовых нитей (выправку пути в плане) производят в соответствии с этой корректировкой расчетной величины сдвижки, то есть выправку пути в плане при каждом цикле его выправки производят с учетом уже выправленного положения пути, при этом после завершения каждого цикла выправки пути в плане измеряют стрелу изгиба рельсовых нитей в плане в зоне его выправки и при необходимости повторно осуществляют сдвижку рельсовых нитей на данном участке пути (в данном цикле его выправки) или учитывают эту стрелу изгиба рельсовых нитей при следующем цикле выправки пути в плане.
Для выправки пути в продольном профиле (подъемки) рельсовых нитей (рельсошпальной решетки, пути) измеряют стрелы прогиба рельсовых нитей в продольном профиле с помощью датчика 10 или 11 стрел прогиба рельсовых нитей в продольном профиле (в зависимости от выбранной базовой рельсовой нити), сравнивают полученные значения с расчетными величинами подъемок рельсовых нитей, полученными по результатам измерительной поездки, затем выправляют путь по результатам этого сравнения. Кроме этого, после каждого цикла выправки железнодорожного пути измеряют при помощи датчика 19 микроуклоны (угол наклона) пути в вертикальной плоскости (в продольном профиле) на длине базы, равной длине тяги 18, соединяющей бегунковую тележку 2 и измерительную тележку 5, расположенную за бегунковой тележкой 2, учитывают положение бегунковой тележки 2 по уровню. Это необходимо учесть, так как тележка 5 связана с тележкой 2 через шарнирное соединение, расположенное в середине бегунковой тележки 2. Из полученной величины вычитают проектный (руководящий) уклон положения пути в продольном профиле, рассчитывают с помощью интегрального преобразования положение выправленного пути. Запоминают результат недоподъемки пути в зоне его выправленного положения в данном цикле выправки пути и микроуклон пути в продольном профиле для учета при следующем цикле работы машины 1 или устройства для выправки железнодорожного пути. Или вместо этого производят повторную подъемку рельсовых нитей (повторную выправку пути) в данном цикле выправки пути на эту величину недоподъемки пути на данном его участке.
Таким образом, перед каждым циклом выправки пути в продольном профиле измеряют стрелы прогиба рельсовых нитей в продольном профиле в зоне выправки пути и на выправленном пути, корректируют расчетную величину подъемки рельсовых нитей с учетом этих измерений и затем подъемку рельсовых нитей производят в соответствии с этой корректировкой расчетной величины подъемки (с учетом уже выправленного положения пути), при этом после завершения каждого цикла выправки пути в продольном профиле измеряют стрелу прогиба рельсовых нитей в продольном профиле в зоне выправки пути, микроуклон пути и стрелу прогиба рельсовых нитей в продольном профиле на выправленном пути и при необходимости повторно осуществляют подъемку рельсовых нитей на данном участке пути (в данном цикле его выправки) или учитывают эту стрелу прогиба рельсовых нитей при следующем цикле выправки пути в продольном профиле.
Параллельно с указанным определяют положение пути по уровню в зоне выправленного пути, сравнивают измеренное значение с проектным (заданным) значением в этом сечении пути, затем выправляют путь по результатам сравнения.
Измеряют после каждого цикла выправки железнодорожного пути положение пути по уровню с помощью датчика 15 уровня, установленного на измерительной тележке 4, расположенной в зоне выправки пути, и датчика 13 уровня, установленного на измерительной тележке 5, расположенной за бегунковой тележкой 2 на выправленном пути, сравнивают измеренные значения с проектными (заданными) значениями в соответствующих сечениях пути и в случае необходимости (если не была реализована заданная величина возвышения) повторно осуществляют выправку пути в этом месте пути (в данном цикле его выправки), подбивку его и обжатие балласта, запоминают измеренные значения и результаты сравнения, перемещают машину 1 к следующим шпалам, начинают следующий цикл их подбивки и выправки пути, при необходимости учитывают в этом цикле величину недоподъемки пути, выявленную на предыдущем(их) цикле(ах) работы машины 1 или устройства для выправки железнодорожного пути.
Использование предложенных способа выправки железнодорожного пути, устройства для выправки железнодорожного пути и машины для выправки железнодорожного пути позволит обеспечить качественную выправку железнодорожного пути, а также позволит в процессе выправки пути (без дополнительного измерительного прохода устройства или машины с этим устройством) оценить положение выправленного пути и получить документ о положении пути после работы на нем машины для выправки железнодорожного пути (документ об эффективности этой машины). Результаты измеренного выправленного положения пути в процессе работы машины можно использовать для проведения последующей выправки без проведения измерительной поездки до работы машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| ПУТЕВАЯ МАШИНА | 2001 |
|
RU2196860C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ И ПРОДОЛЬНОМ ПРОФИЛЕ | 1973 |
|
SU384957A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
Изобретения относятся к способу и устройствам, используемым при строительстве и ремонте железнодорожного пути. Способ заключается в том, что перед каждым циклом выправки пути измеряют стрелы изгиба рельсовых нитей в плане и прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню в зоне выправки пути и на выправленном пути, корректируют расчетные величины сдвижки и подъемки рельсовых нитей с учетом этих измерений и затем выправляют железнодорожный путь. Машина содержит раму, опирающуюся на ходовые тележки, смонтированные на раме устройство для выправки пути, включающее в себя подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство с датчиком пройденного пути, измерительными тележками и датчиками стрел прогиба рельсовых нитей в продольном профиле, датчиками уровня, датчиками стрел изгиба рельсовых нитей в плане и датчиком уклона, размещаемым в зоне выправленного пути и имеющим возможность измерения микроуклонов пути в продольном профиле. Устройство управления подъемно-рихтовочным устройством представляет собой компьютер, с которым соединены упомянутые датчики. Технический результат - повышение точности выправки железнодорожного пути за счет исключения влияния ошибок, связанных с точностью отработки заданных величин сдвижек (подъемок) пути исполнительным органом, релаксацией пути, и определение положения пути после работы устройства или машины для выправки пути.3 с. и 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание и инструкция по эксплуатации | |||
| -М.: Транспорт, 1995, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

