Изобретение относится к электрическому транспорту, а именно к области автоматического выравнивания нагрузок тяговых двигателей.
Известен способ выравнивания нагрузок тяговых двигателей однофазно - постоянного тока электровоза ВЛ80Р, при котором в якорную цепь двигателей при рекуперации включаются балластные резисторы, смягчающие жесткие электромеханические характеристики двигателей при независимом их возбуждении (см. книгу Тихменева Б. Н., Трахтмана Л.М. Подвижной состав электрифицированных железных дорог. Теория работы электрооборудования. Электрические схемы и аппараты. Учебник для вузов ж.-д. трансп. - 4-е изд., перераб. и доп. - М.; Транспорт, 1980. - 471 с. на страницах 33 - 36).
При таком способе выравнивания нагрузок разбаланс токов уменьшается, но все же составляет до 48%, что предопределяет недоиспользование тормозных возможностей электровоза, снижение возврата электрической энергии в контактную сеть, увеличенный износ бандажей колесных пар, затраты на приобретение и установку балластных резисторов и потери энергии в них.
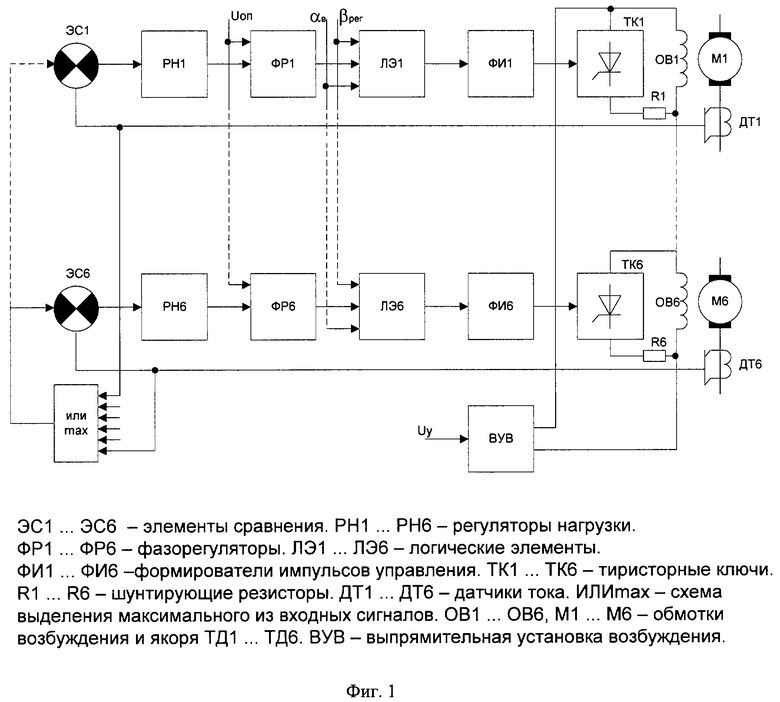
Наиболее близким по технической сущности является способ выравнивания нагрузок тяговых двигателей постоянного тока в режиме рекуперации, состоящий в том, что для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и, в зависимости от величины этой разности, формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя, причем сигналом, из которого вычитается сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный максимальному из токов якорей всех тяговых двигателей (см. книгу Электровозостроение: Сборник научных трудов ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" (ОАО "ВЭлНИИ"). - 1998. Т.40 - 348с. на страницах 283 - 288).
Функциональная схема системы выравнивания нагрузок, соответствующая способу, приведена на фиг.1.
Этот способ имеет следующий недостаток.
Если в качестве регуляторов использовать регуляторы интегральные или пропорционально-интегральные, то выполняется следующее.
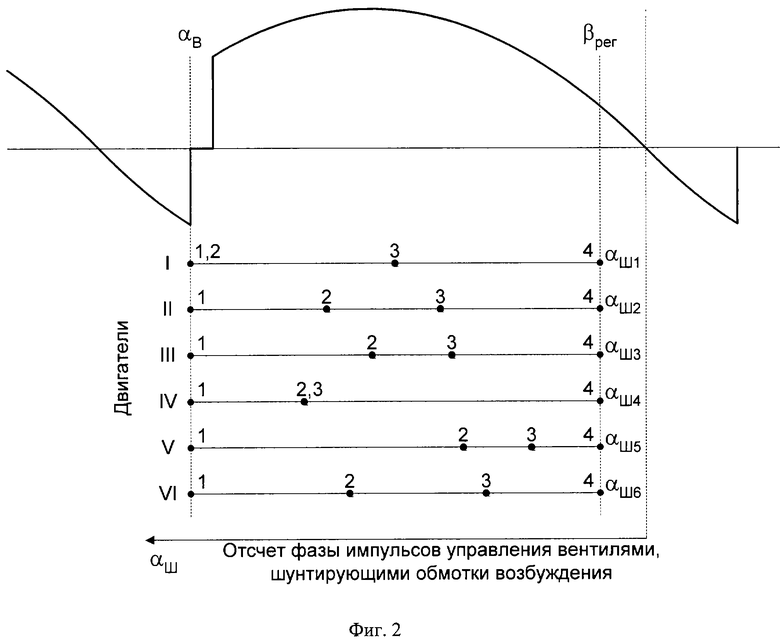
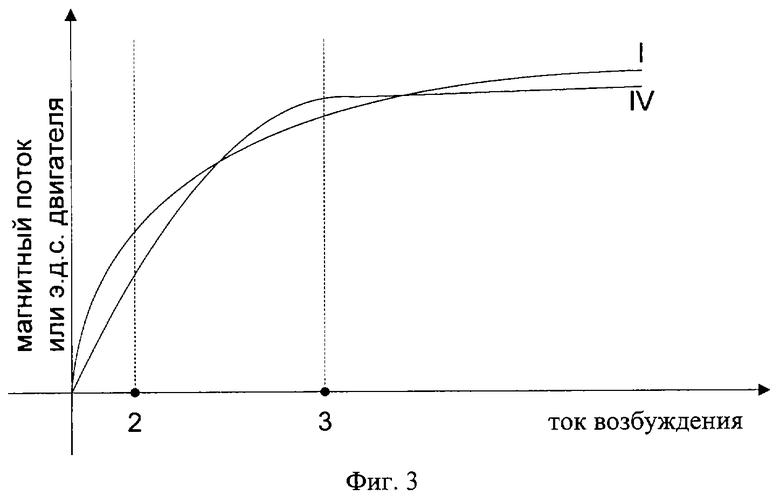
Как указано на с. 284, при входе в рекуперацию регуляторами нагрузок устанавливаются максимальные фазы углов проводимости вентилей, шунтирующих обмотки возбуждения тяговых двигателей. На фиг.2 этому соответствуют точки с цифрой 1 На этом же рисунке показан диапазон регулирования фазы импульсов управления вентилями, шунтирующими обмотки возбуждения шести (для электровоза ЭП1) тяговых двигателей: от αB (угла регулирования общего тока возбуждения) до βРЕГ (угла опережения инвертора). Ток якоря тягового двигателя в режиме рекуперации определяется разностью между э.д.с. двигателя и напряжением питающей сети. Предположим, что у I тягового двигателя в силу разброса характеристик намагничивания э.д.с., а следовательно и ток якоря, больше, чем у других. После отработки регуляторами выравнивания разницы токов якорей, фазы вентилей, шунтирующих обмотки возбуждения, переместятся в точки 2 в соответствии с разбросом их характеристик намагничивания, причем для первого двигателя, по току которого ведется выравнивание, точки 1 и 2 совпадут. Токи якорей тяговых двигателей выравняются. Однако при изменениях токов в силу разных причин, например, при юзе или при пересечении их характеристик намагничивания (см. фиг.3), может произойти смена "лидера", т.е. двигателем, по току якоря которого ведется выравнивание, может стать другой, например IV. Тогда, после отработки регуляторами разбаланса токов по новому "лидеру", фазы вентилей, шунтирующих обмотки возбуждения двигателей, займут положение в точках 3, причем для двигателя IV точки 2 и 3 совпадут. При последующих сменах "лидера" фазы вентилей, шунтирующих обмотки возбуждения, продолжают уменьшаться, пока не достигнут ограничения по углу опережения инвертора βРЕГ (точки 4). Таким образом, произойдет "насыщение" регуляторов выравнивания нагрузок и выравнивание прекратится.
Применение пропорциональных регуляторов дает статическую ошибку регулирования, присущую этому типу регуляторов.
Задачей изобретения является повышение качества выравнивания нагрузок в режиме рекуперации, при котором выравнивание осуществляется также в рабочем диапазоне регуляторов выравнивания от αB до βРЕГ, но насыщения регуляторов выравнивания не происходит и нет статической ошибки регулирования.
Поставленная задача решается способом выравнивания нагрузок тяговых двигателей, состоящим в том, что для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и в зависимости от величины этой разности, формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя, причем сигналом, из которого вычитают сигнал, пропорциональный току якоря этого двигателя, является сигнал, пропорциональный току якоря тягового двигателя с максимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения, а при равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения, вычитание ведут из сигнала, пропорционального максимальному из токов якорей этих тяговых двигателей.
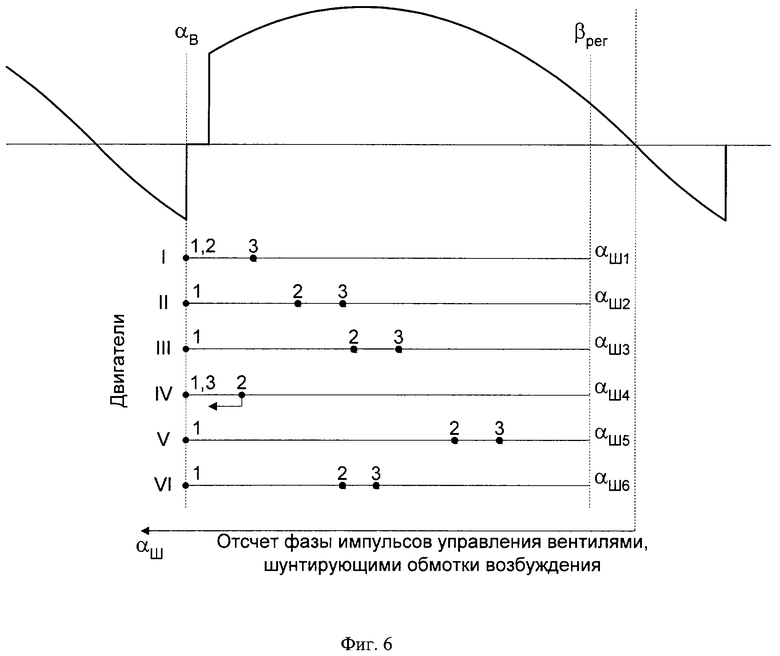
На фиг.4 изображено устройство для реализации предлагаемого способа; на фиг. 5 - алгоритм функционирования устройства; фиг.6 - регулирование фазы вентилей, шунтирующих обмотки возбуждения, по предлагаемому способу.
Блок тиристорных ключей 1 управляется микропроцессорной системой, состоящей из процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, блока синхронизации 5, аналого-цифрового преобразователя (АЦП) 6, дискретного фазосдвигающего устройства 7 и выходного усилителя 8. Входы - выходы процессора 2, ОЗУ 3, ПЗУ 4, выходы АЦП 6 и вход дискретного фазосдвигающего устройства 7 соединены шиной адресов-данных 9. Выход дискретного фазосдвигающего устройства 7 соединен со входом выходного усилителя 8, выходы которого соединены с тиристорными ключами отпитки 1. Выход блока синхронизации 5 соединен с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, АЦП 6, дискретного фазосдвигающего устройства 7 и распределителя 8.
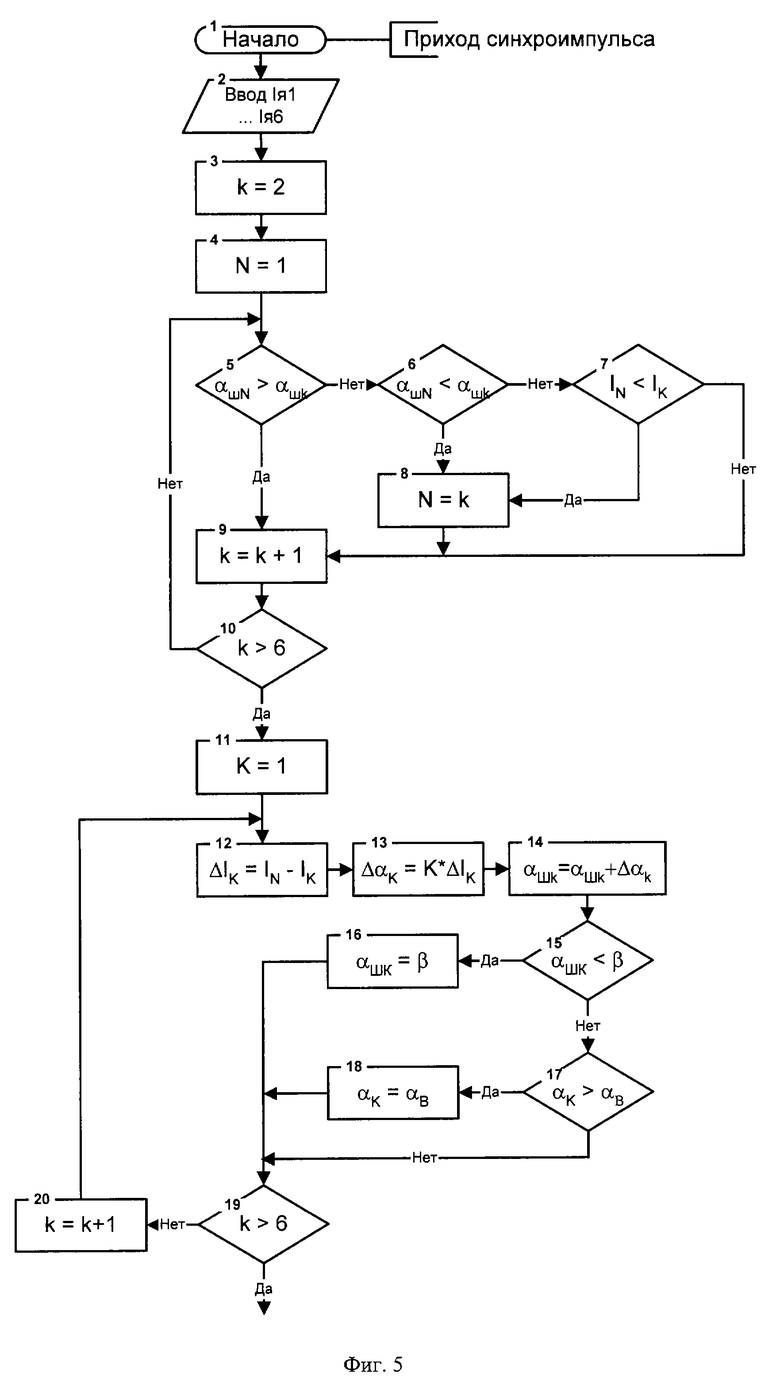
Способ реализуется в соответствии с алгоритмом, приведенным на фиг.5.
При переходе питающего напряжения через нулевое значение на выходе блока синхронизации 5 появляется импульс, по которому производится начальная установка процессора 2, ОЗУ 3, ПЗУ 4, дискретного фазосдвигающего устройства 7 и запускается АЦП 6. После этого, микропроцессорная система функционирует в соответствии с командами и константами, записанными в ПЗУ 4, причем в первом полупериоде питающего напряжения, при входе в рекуперацию, значения углов отпирания вентилей, шунтирующих обмотки возбуждения αш1...αш6, задают равными αB, что соответствует максимальной величине отпитки.
В текущем полупериоде осуществляется ввод (блок 2) значений токов якорей шести двигателей и определяют номер тягового двигателя с максимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения, причем при равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения двигателей, номер двигателя определяется с максимальным током якоря из этих тяговых двигателей (блок 3...10). В блоке 12 из сигнала, пропорционального току двигателя, по которому осуществляемся выравнивание IN, вычитается сигнал, пропорциональный току якоря того двигателя, ток которого выравнивается. В блоке 13 осуществляется ввод в регулятор сигнала, пропорционального этой разности, и формирование фазы импульсов управления αшк (блок 14) вентилем, шунтирующим обмотку возбуждения двигателя, нагрузка которого выравнивается. В блоках 15...18 значение фазы ограничивается по максимуму и минимуму.
Предлагаемый способ выравнивания нагрузок тяговых двигателей позволяет выровнять их во всем диапазоне изменения без статической ошибки, при этом точность выравнивания определяется лишь погрешностью датчиков тока и АЦП, входящего в состав устройства, реализующего данный способ. Суммарная погрешность не превышает 2% при допустимой по техническим требованиям 5%.
Использование: электроподвижной состав переменного тока в режиме рекуперативного торможения. Способ выравнивания нагрузок тяговых двигателей состоит в том, что для каждого тягового двигателя из сигала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов. В зависимости от величины этой разности формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя. Причем сигналом, из которого вычитают сигнал, пропорциональный току якоря этого двигателя, является сигнал, пропорциональный току якоря тягового двигателя с максимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения. Этим достигается выравнивание нагрузок тяговых двигателей во всем диапазоне изменения, при этом точность выравнивания определяется лишь погрешностью датчиков тока и АЦП. 6 ил.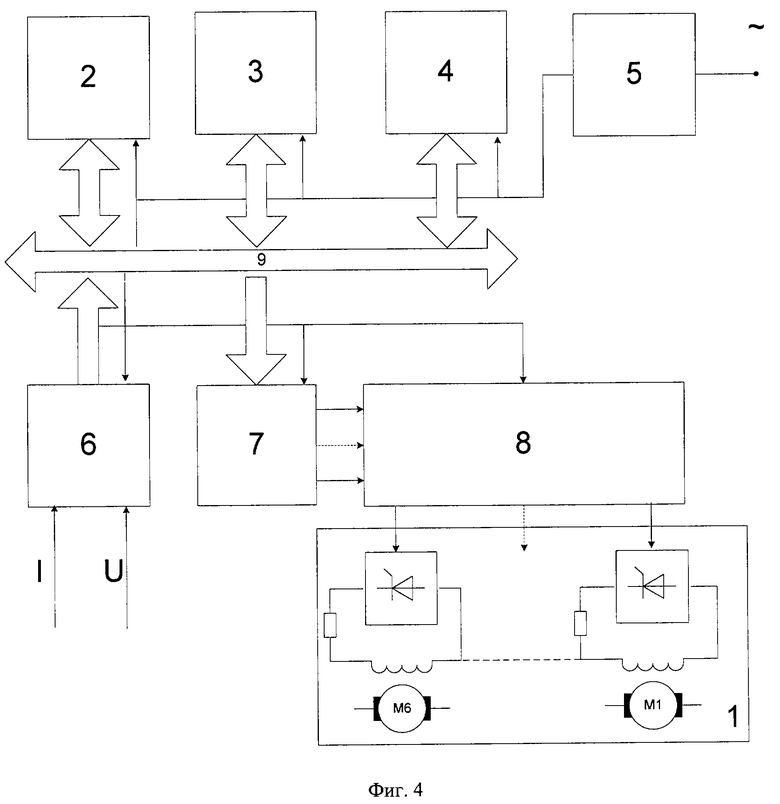
Способ выравнивания нагрузок тяговых двигателей постоянного тока в режиме рекуперации, состоящий в том, что для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и в зависимости от величины этой разности формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя, отличающийся тем, что сигналом, из которого вычитают сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный току якоря тягового двигателя с максимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения.
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ТОКАМЕЖДУ ПАРАЛЛЕЛЬНЫМИ ВЕТВЯМИТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1972 |
|
SU435149A1 |
| DE 25114957 А, 08.01.1976 | |||
| ШИНА | 2020 |
|
RU2746474C1 |
| Электровозостроение: Сборник научных трудов ОАO "ВЭлНИИ", т.40, г.Новочеркасск, 1998, с.283-288. | |||

