Изобретение относится к системе управления мобильным агрегатом и оценки его работы и может быть использовано для оптимизации соотношения сил тяги, тяжести и торможения при работе в различных условиях.
Цель изобретения - повышение экологической и экономической эффективности и безопасности работы,
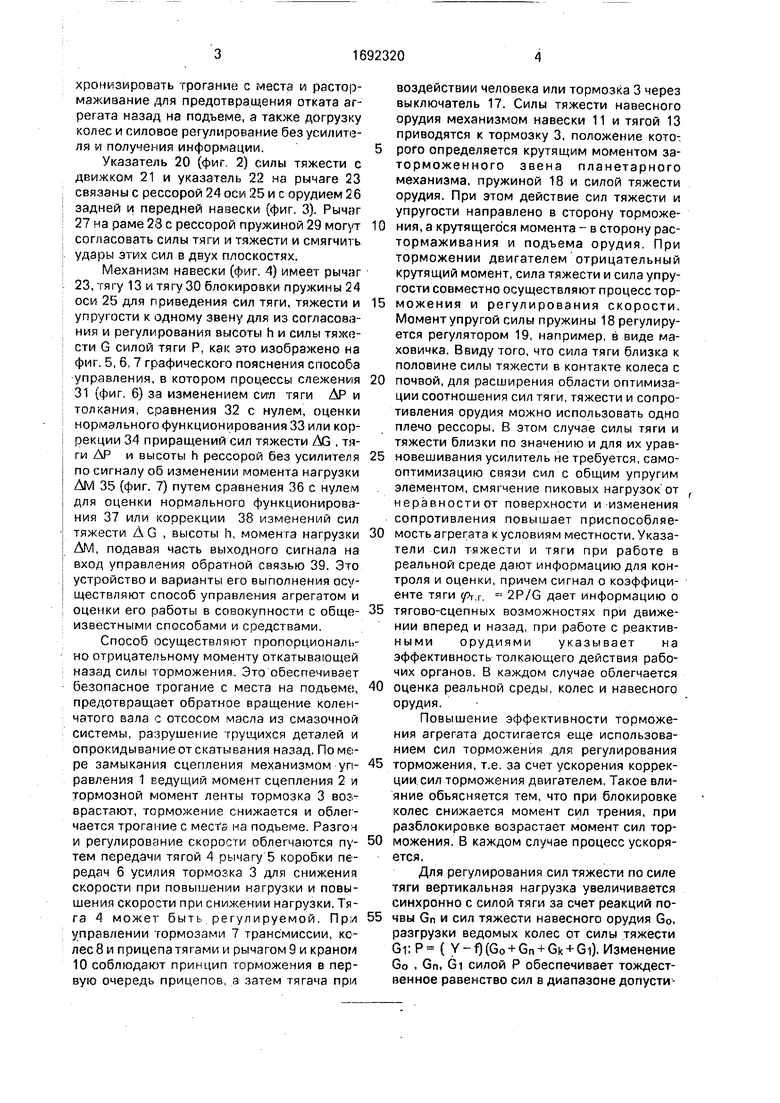
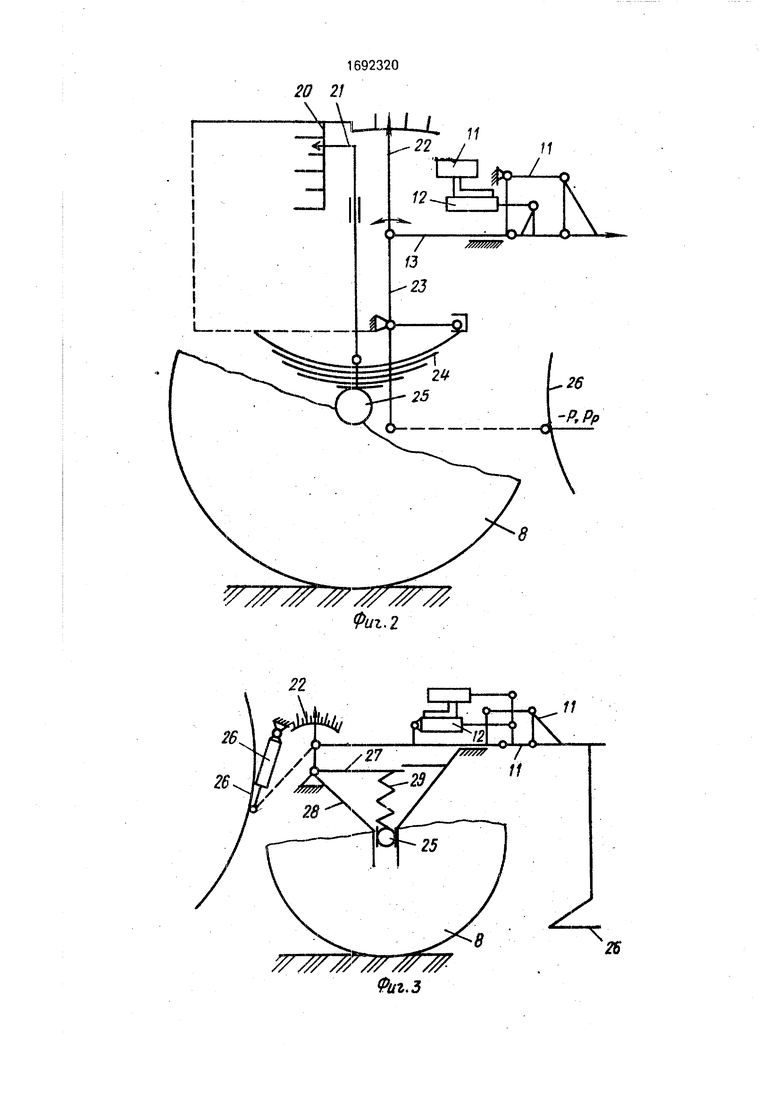
На фиг. 1 схематически изображена связь средств, осуществляющих способ; на фиг. 2 - соединение подвески с механизмом навески и указателями; на фиг. 3 - вариант выполнения связей элементов; на фиг. 4 - механизм навески, на фиг. 5 - график связи силы и высоты; на фиг. 6 - схема осуществления способа; на фиг. 7 - то же, по моменту сил.
Способ осуществляется устройством, содержащим механизм управления 1 (фиг, 1)
сцепления в видетрехзвениого планетарного механизма 2, тормозок 3 одного звена которого соединен тягой 4 с рычагом 5 коробки передач 6, выходной вал которого связан с тормозом 7 и ксчесзми 8, привод 9 тормоза трансмиссии и кран 10 тормозов колес, механизм навески 11 с гидрсцилинд- ром 12 подъема и нижней тягой, связанной тягой 13, пропущенной через ролики рычага регулятора 14 длины, тяги 15 связи и органы (рычаг и педаль) 1C управления с переключателем (выключателем) 17.ачтоматического управления по сигналу сцепления и пружины 18, упругая сила которой регулируется винтом 19.
Связь тормозка 3 сцепления с коробкой передач, тормозами и механизмом навески можно регулировать согласно силы тяги, торможения, догрузки ведущих колес силами тяжести м высоту назесного орудия, синО
ю
W
го о
хронизировать трогание с места и растор- маживание для предотвращения отката агрегата назад на подъеме, а также догрузку колес и силовое регулирование без усилителя и получения информации.
Указатель 20 (фиг. 2) силы тяжести с движком 21 и указатель 22 на рычаге 23 связаны с рессорой 24 оси 25 и с орудием 26 задней и передней навески (фиг. 3). Рычаг 27 на раме 28 с рессорой пружиной 29 могут согласовать силы тяги и тяжести и смягчить удары этих сил в двух плоскостях.
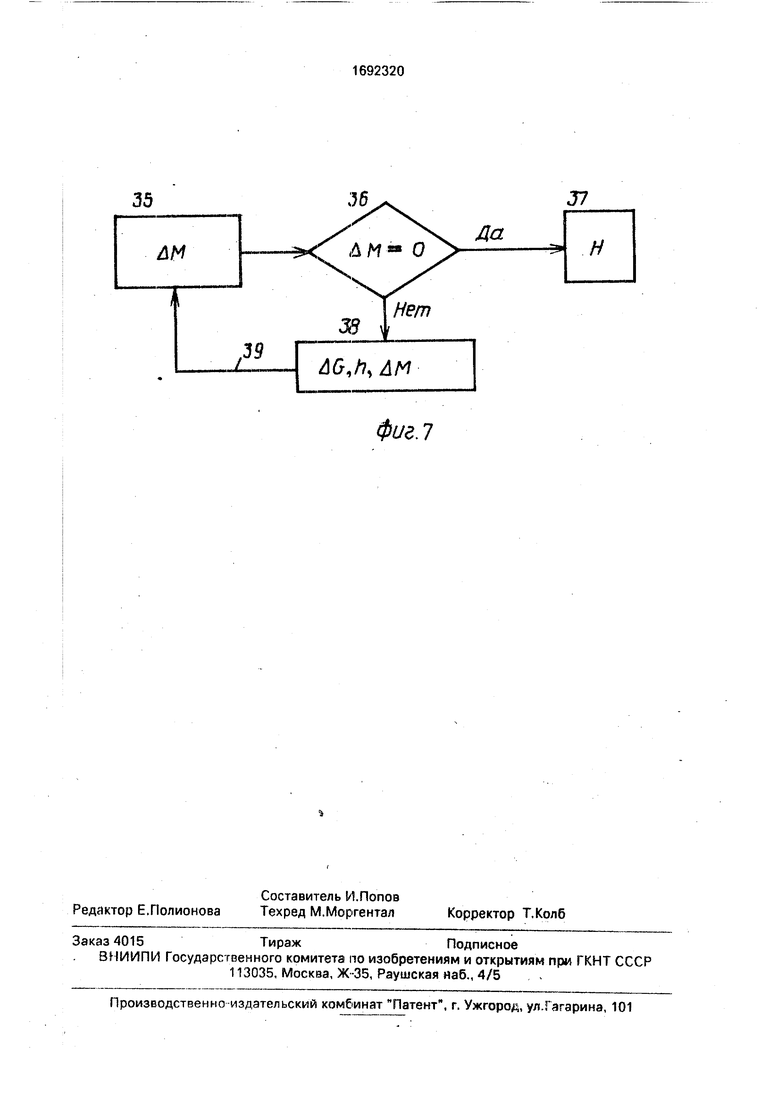
Механизм навески (фиг. 4) имеет рычаг 23, тягу 13 и тягу 30 блокировки пружины 24 оси 25 для приведения сил тяги, тяжести и упругости к одному звену для из согласования и регулирования высоты h и силы тяжести G силой тяги Р, как это изображено на фиг. 5, 6, 7 графического пояснения способа управления, в котором процессы слежения 31 (фиг. 6) за изменением сил тяги ДР и толкания, сравнения 32 с нулем, оценки нормального функционирования 33 или коррекции 34 приращений сил тяжести AG , тяги АР и высоты h рессорой без усилителя по сигналу об изменении момента нагрузки ДМ 35 (фиг. 7) путем сравнения 36 с нулем для оценки нормального функционирования 37 или коррекции 38 изменений сил тяжести A G , высоты h, момента нагрузки AM, подавая часть выходного сигнала на вход управления обратной связью 39, Это устройство и варианты его выполнения осуществляют способ управления агрегатом и оценки его работы в совокупности с общеизвестными способами и средствами.
Способ осуществляют пропорционально отрицательному моменту откатывающей назад силы торможения. Это обеспечивает безопасное трогание с места на подъеме, предотвращает обратное вращение коленчатого вала с отсосом масла из смазочной системы, разрушение трущихся деталей и опрокидывание от скатывания назад. По мере замыкания сцепления механизмом управления 1 ведущий момент сцепления 2 и тормозной момент ленты тормозка 3 воз- врастают, торможение снижается и облегчается трогание с места на подъеме. Разгон и регулирование скорости облегчаются путем передачи тягой 4 рычагу 5 коробки передач 6 усилия тормозка 3 для снижения скорости при повышении нагрузки и повышения скорости при снижении нагрузки. Тяга 4 может быть регулируемой. При управлении тормозами 7 трансмиссии, колес 8 и прицепа тягами и рычагом 9 и краном 10 соблюдают принцип торможения в первую очередь прицепов, а затем тягача при
воздействии человека или тормозка 3 через выключатель 17. Силы тяжести навесного орудия механизмом навески 11 и тягой 13 приводятся к тормозку 3, положение которого определяется крутящим моментом заторможенного звена планетарного механизма, пружиной 18 и силой тяжести орудия. При этом действие сил тяжести и упругости направлено в сторону торможения, а крутящегося момента - в сторону рас- тормаживания и подъема орудия. При торможении двигателем отрицательный крутящий момент, сила тяжести и сила упругости совместно осуществляют процесс торможения и регулирования скорости. Момент упругой силы пружины 18 регулируется регулятором 19, например, в виде маховичка. Ввиду того, что сила тяги близка к половине силы тяжести в контакте колеса с
почвой, для расширения области оптимизации соотношения сил тяги, тяжести и сопротивления орудия можно использовать одно плечо рессоры. В этом случае силы тяги и тяжести близки по значению и для их уравновешивания усилитель не требуется, самооптимизацию связи сил с общим упругим элементом, смягчение пиковых нагрузок от f неравностиот поверхности и изменения сопротивления повышает приспособляемость агрегата к условиям местности. Указатели сил тяжести и тяги при работе в реальной среде дают информацию для контроля и оценки, причем сигнал о коэффициенте тяги рт г 2P/G дает информацию о
тягово-сцепных возможностях при движении вперед и назад, при работе с реактивными орудиями указывает на эффективность толкающего действия рабочих органов. В каждом случае облегчается
оценка реальной среды, колес и навесного орудия.
Повышение эффективности торможения агрегата достигается еще использованием сил торможения для регулирования
торможения, т.е. за счет ускорения коррекции сил торможения двигателем. Такое влияние объясняется тем, что при блокировке колес снижается момент сил трения, при разблокировке возрастает момент сил торможения. В каждом случае процесс ускоряется.
Для регулирования сил тяжести по силе тяги вертикальная нагрузка увеличивается синхронно с силой тяги за счет реакций почвы Gn и сил тяжести навесного орудия G0, разгрузки ведомых колес от силы тяжести Gi:P ( Y - f) (Go + Gn + Gk + Gi). Изменение Go , Gn, Gi силой Р обеспечивает тождественное равенство сил в диапазоне допустимого их изменения. За пределами такого регулирования вертикальных сил регулируют горизонтальное сопротивление и задачу переводят в область известного силового регулирования.
Увеличение вертикальной нагрузки на ось обеспечивает синхронность изменения сил тяжести и тяги, а это снижает буксование. Работу подвески и орудия можно согласовать при условии, если одна рессора работает в двух плоскостях и момент силы тяги догружается силой тяжести, как это показано на фигурах графической части.
Благоприятное изменение сил тяжести в контакте колеса с почвой силами тяги дает увеличение силы тяги и снижение буксования при перегрузке, совмещает функции гидравлического догружателя ведущих колес, позиционно-силового регулятора и тор- мозной системы, замещает функции средств безопасного трогания с места на подъеме.
Рассмотренные средства в совокупности с известными обеспечивают согласование сил тяги и тяжести, а на подъеме еще и сил торможения. На подъеме при трогании с места силы торможения снижаются по мере возрастания сил тяги, исключают откатывание назад, облегчают работу водителя, замещая его функции согласования работы муфты сцепления и гормозной системы, догружая ведущие колеса, согласовывают работу механизма навески и упругого звена подвески, а указатели дают информацию для испытания машинки местности при реальной работе, оценке и оптимизации режимов в реальной среде.
Формула изобретения Способ управления мо.бильным агрегатом и оценки его работы, при котором регулируют силы тяги и силы тяжести при формирования режимов работы, отличающийся тем, что, с целью повышения экологической и экономической эффективности и безопасности работы , в качестве сигнала при регулировании сил тяжести и торможения используют крутящий момент, на подъеме при трогании силы торможения снижают до нуля пропорционально увеличению крутящего момента, силы тяги и силы тяжести на ведущих колесах сравнивают и изменяют пропорционально, информацию об их изменении используют для управления и оценки машины и местности.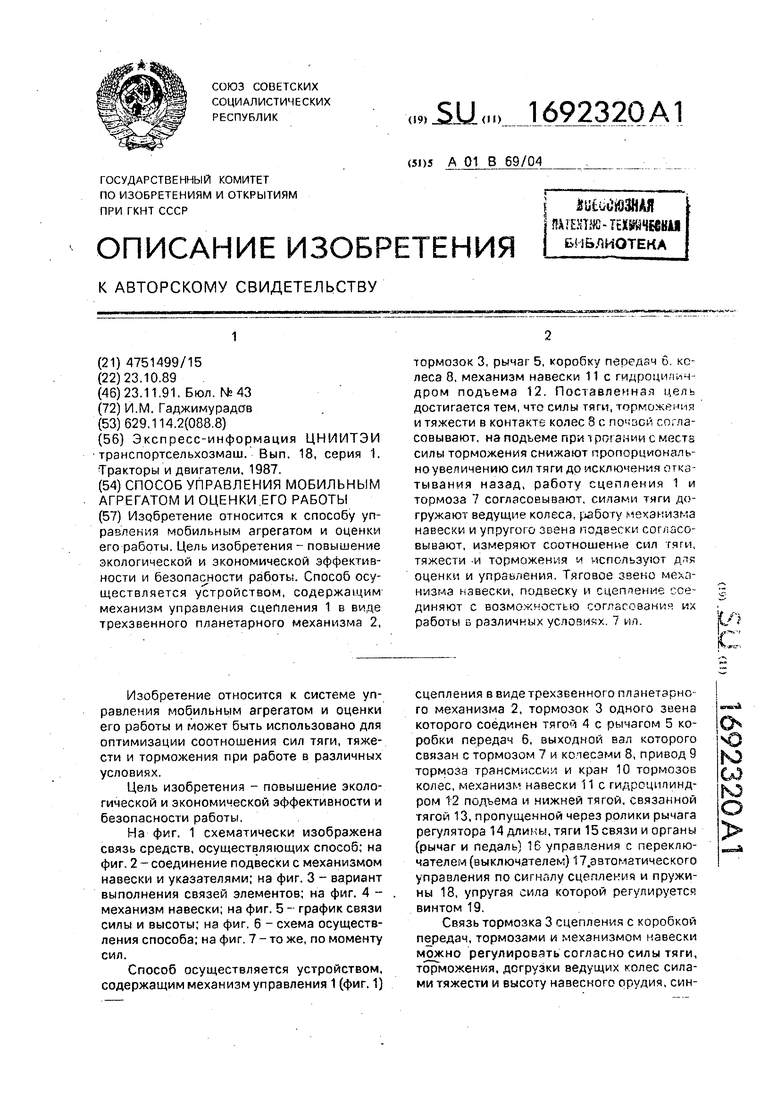

Изобретение относится к способу управления мобильным агрегатом и оценки его работы. Цель изобретения - повышение экологической и экономической эффективности и безопасности работы. Способ осуществляется устройством, содержащим механизм управления сцепления 1 в виде трехзвенного планетарного механизма 2, тормозок 3, рычаг 5, коробку пепедач 6 колеса 8, механизм навески 11 с гидроцилиндром подъема 12. Поставленная цель достигается тем, что силы тяги, торможения и тяжести в контакте колес 8 с почзсй согласовывают, на подъеме притро а иисместз силы торможения снижают пропорциональ- ноувеличению сил тяги до исключения откатывания назад, работу сцепления 1 и тормоза 7 согласовывают, силами тяги догружают ведущие колеса, работу механизма навески и упругого звена подвески согласовывают, измеряют соотношение сил тяги, тяжести и торможения м испсльзуют для оценки и управления. Тяговое звено механизма навески, подвеску и сцепление соединяют с возможностью согласованно их работы в различных условиях 7 ил п
-ч -т+-+ . я ff p
20 21 Л
Ж
ЯР.
я
///f7J7/ 7W/f Риг.З
22
ff
/
11
a
/г.2
И
//sfyW/ZT-T //7////// Фиг.Ц
h G
31
АР
Фиг. 5
Ab,h,AP
Фа г. б
35
4М
AG,h AM
Фиг.7
| Экспресс-информация ЦНИИТЭИ транспортсельхозмаш | |||
| Вып | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Тракторы и двигатели, 1987. | |||
