Изобретение может найти применение в промысловой геофизике. Преимущественно изобретение может быть использовано, например, при инклинометрии скважин.
Известен магнитометрический инклинометр, содержащий в корпусе скважинного прибора три жестко закрепленных с корпусом феррозонда и три акселерометра, оси чувствительности которых попарно совпадают и образуют ортогональную измерительную систему координат (Г.Н.Ковшов, Р.И.Алимбеков, А.В.Жибер. Инклинометры (основы теории и проектирования), Уфа: Гилем, 1998. - 380 с., с.51-68).
Недостатком данного инклинометра является наличие синусоидальной ошибки определения зенитного и азимутального углов, т.к. измерители ускорений и геомагнитного поля участвуют во вращении скважинного прибора вокруг продольной оси (по апсидальному углу).
Наиболее близким по технической сущности и достигаемому результату является инклинометр (пат. РФ № 2100594 приоритет от 09.02.1996 г., МКИ Е 21 В 47/02), содержащий наземный вычислитель, связанный каротажным кабелем через наземный блок со скважинным прибором. Скважинный прибор содержит одноосный гиростабилизатор, на платформе которого жестко установлены измерители ускорений, осями чувствительности ориентированные перпендикулярно оси стабилизации гиростабилизатора, и трехстепенной гироскоп, второй датчик угла которого через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы датчика угла гиростабилизатора, выходы измерителя ускорений и выход измерителя угловой скорости, причем первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, сигнальный выход которого подключен к первому датчику момента гироскопа, расположенному на оси, перпендикулярной оси стабилизации, а каротажный кабель двумя своими входами соединен со вторым и третьим выходами блока цифровой обработки.
Особенность работы инклинометра прототипа состоит в следующем.
В режиме выставки при подаче на одноосный гиростабилизатор сигнала управления происходит вращение платформы на заданный угол. В процессе вращения в дискретные моменты времени производятся измерения угла поворота осей чувствительности измерителей ускорений относительно корпуса и горизонтальной составляющей угловой скорости вращения Земли. Далее аналитически вычисляется азимут осей чувствительности измерителей ускорений в момент окончания начальной выставки и формируется начальное значение матрицы ориентации.
При переходе в режим движения скважинного прибора в гиростабилизаторе продолжают работать контур индикаторной гироскопической стабилизации и контур измерения угловой скорости, который в данном случае выполняет роль контура электрического арретирования, и по сигналам датчика угла и измерителей ускорений аналитически формируется азимут и зенитный угол скважины.
Для сигнализации о температурном режиме в скважинном приборе установлен датчик температуры, который подключен к одному из входов блока цифровой обработки.
Недостатками известного устройства, принятого за прототип, являются необходимость процедуры начальной выставки скважинного прибора, ошибка определения начальной азимутальной ориентации, систематический дрейф гироскопа, влияющий на точность определения траектории скважины.
Задачами изобретения являются исключение начальной выставки и повышение точности определения азимута скважины при непрерывном движении скважинного прибора в скважине.
Указанная задача достигается за счет того, что в инклинометре, содержащем наземный вычислитель, связанный каротажным кабелем через наземный блок со скважинным прибором, при этом скважинный прибор содержит температурный датчик, подключенный к одному из входов блока цифровой обработки, одноосный стабилизатор, на платформе которого жестко установлены измерители ускорений, осями чувствительности ориентированные перпендикулярно оси стабилизации стабилизатора, датчик угла стабилизатора, своими выходами подключенный к входам блока цифровой обработки, к другим входам которого подключены выходы измерителей ускорений, согласно изобретению скважинный прибор дополнительно содержит на платформе трехкоординатный феррозондный датчик геомагнитного поля Земли, две оси чувствительности которого совпадают с осями чувствительности измерителей ускорений, а третья - с продольной осью прибора, выходы феррозондного датчика соединены со входами блока цифровой обработки, выход блока цифровой обработки соединен с наземным блоком и со входом ЦАП, который через усилитель мощности соединен с датчиком момента.
Исключение необходимости выставки и повышение точности измерения обеспечивается за счет замены гироскопа на вновь введенный феррозонд, который постоянно физически удерживается вдоль оси OZп по направлению запад-восток, что не требует режима начальной выставки. Физическое поддержание направления запад-восток имеет меньшую ошибку, чем определение начальной азимутальной ориентации, т.к. наличие сигнала на феррозонде, расположенного на оси OZп списывается в ноль. Изменение курса пропорционально углу поворота рамки, который определяется при помощи измерителей ускорений, измеряющих угол поворота рамки платформы. Феррозондные датчики в отличие от гироскопических приборов не имеют дрейфа.
Таким образом, очевидно, что вновь введенные существенные признаки способствуют повышению точности измерения.
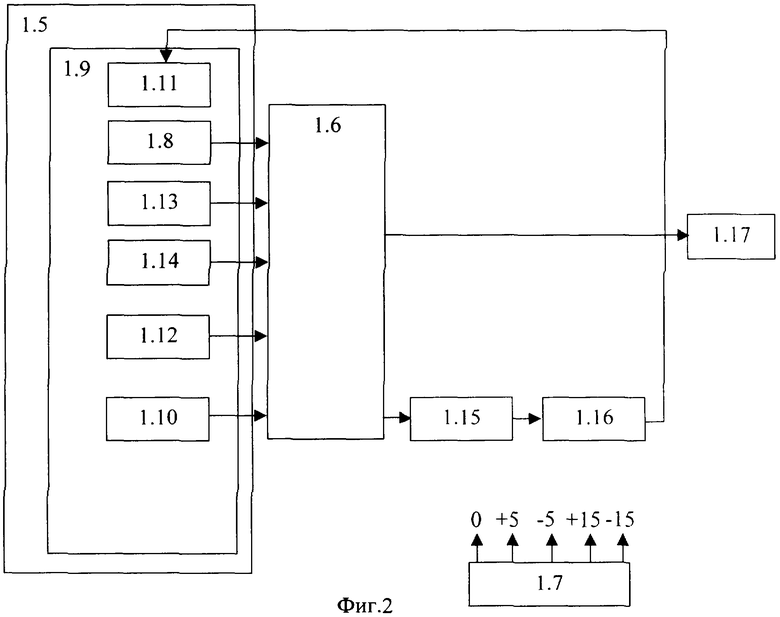
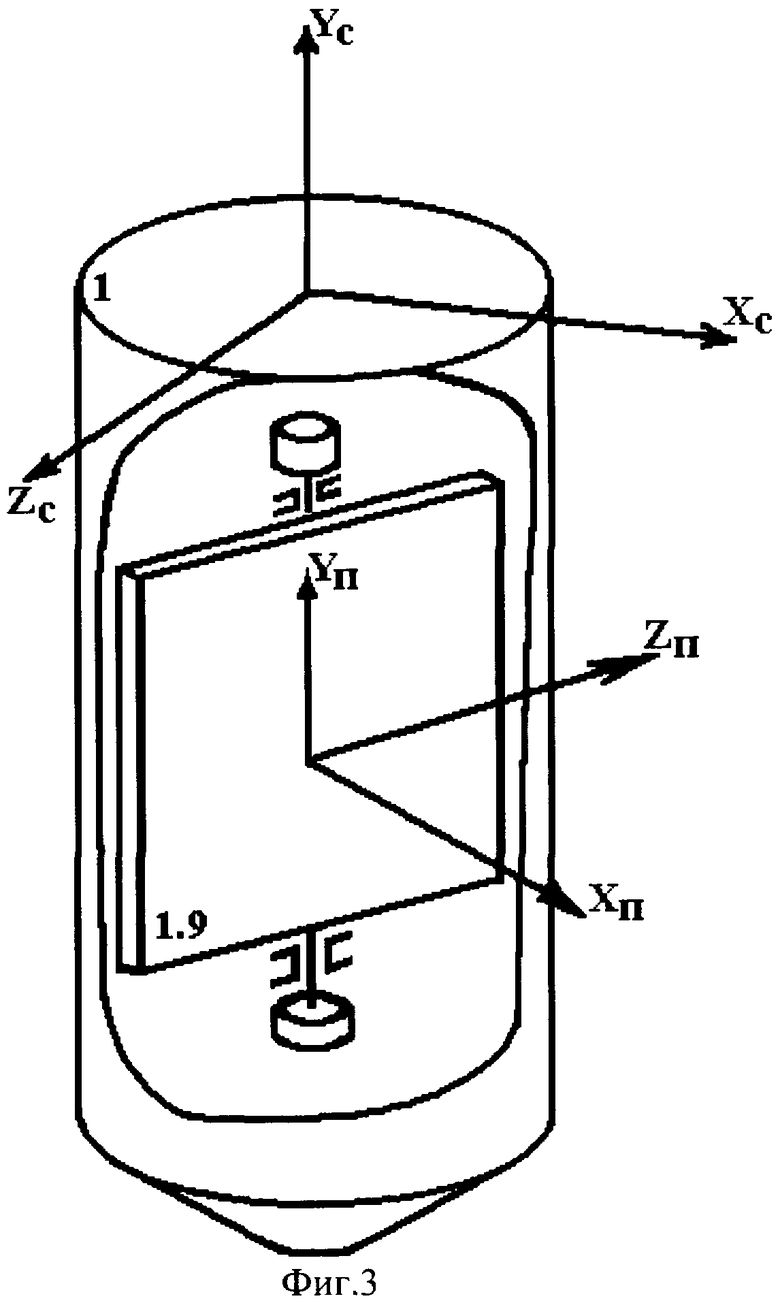
Сущность изобретения поясняется чертежами, где на Фиг.1 изображена блок-схема инклинометра, на Фиг.2 - блок-схема скважинного прибора, на Фиг.3 - системы координат, используемые при описании изобретения.
На чертежах введены следующие обозначения:
1 - скважинный прибор (СП), при этом:
1.5 - одноосный стабилизатор;
1.6 - блок цифровой обработки для сигнализации о температурном режиме;
1.7 - вторичные источники питания (ВИП), обеспечивающие напряжения ±5В, ±15В;
1.8 - температурный датчик;
1.9 - платформа стабилизатора (ось подвеса OYпл которой совпадает с продольной осью OYп СП)
1.10 - датчик угла поворота платформы стабилизатора;
1.11 - датчик момента;
1.12 - трехкоординатный феррозондный датчик геомагнитного поля Земли, состоящий из трех ортогонально расположенных феррозондов;
1.13, 1.14 - измерители ускорений;
1.15 - цифроаналоговый преобразователь (ЦАП);
1.16 - усилитель мощности;
1.17 - выход устройства.
2 - наземный вычислитель, например IBM PC типа Notebook;
3 - наземный блок;
4 - устройство подъема-спуска СП, например электрическая лебедка с коллектором;
5 - каротажный кабель, который осуществляет спуск и подъем СП 1, подвод электрического питания, прием/передачу информации.
Системы координат, применяемые в изобретении, показаны на Фиг.3, при этом OXпYпZп - система координат, связанная с измерительными осями датчиков 1.13, 1.14 и 1.12 (акселерометров и феррозондного датчика), расположенных на вращающейся платформе 1.9, причем ось ОХп перпендикулярна плоскости платформы 1.9; ось OXп направлена вертикально вверх и совпадает с осью вращения платформы 1.9; ось OZп дополняет систему координат до правой;
OXcYcZc - система координат, связанная со скважинным прибором 1, ось OYc совпадает с продольной осью прибора 1, оси ОХс и OZc ей перпендикулярны.
Инклинометр содержит наземный вычислитель 2, связанный каротажным кабелем 5 со скважинным прибором 1. При помощи каротажного кабеля 5 осуществляется спуск и подъем СП 1, подвод электрического питания, прием/передача информации через наземный блок 3 и устройство 4 подъема-спуска СП 1 (например, электрическая лебедка с коллектором). Скважинный прибор 1 содержит температурный датчик 1.8, подключенный к одному из входов блока 1.6 цифровой обработки для сигнализации о температурном режиме в скважинном приборе 1, одноосный стабилизатор 1.5, на платформе 1.9 которого жестко установлены измерители 1.13 и 1.14 ускорений, осями чувствительности ориентированные перпендикулярно оси стабилизации стабилизатора 1.5, датчик 1.10 угла поворота платформы 1.9 стабилизатора 1.5, своими выходами подключенный к входам блока 1.6 цифровой обработки, к другим входам которого подключены выходы измерителей 1.13, 1.14 ускорений. Скважинный прибор 1 дополнительно содержит на платформе 1.9 стабилизатора 1.5 трехкоординатный феррозондный датчик 1.12 геомагнитного поля Земли, две оси чувствительности которого совпадают с осями чувствительности измерителей 1.13, 1.14 ускорений, а третья - с продольной осью СП 1. Выходы феррозондного датчика 1.12 соединены со входами блока 1.6 цифровой обработки. Выход блока 1.6 цифровой обработки соединен с наземным блоком 3 и со входом ЦАП 1.15, который через усилитель 1.16 мощности соединен с датчиком 1.11 момента, разворачивающим платформу 1.9 вокруг оси стабилизации. Для питания электронных узлов и блоков используются вторичные источники 1.7 питания, преобразующие наземное силовое напряжение питания в набор напряжений для обеспечения работы СП 1.
Устройство работает следующим образом. После подачи питания на скважинный прибор 1 аналоговый сигнал с выхода феррозондного датчика 1.12, установленного по оси OZп, с помощью блока 1.6 цифровой обработки преобразуется в цифровой код и передается по каротажному кабелю 5 через наземный блок 3 на наземный вычислитель 2, где обрабатывается с учетом инструментальных погрешностей феррозондного датчика 1.12 и передается на вход блока 1.6 цифровой обработки скважинного прибора 1, затем преобразуется в аналоговый сигнал с помощью ЦАП 1.15 и через усилитель 1.16 мощности поступает на датчик 1.11 момента, который поворачивает платформу 1.9 вокруг оси стабилизации таким образом, что сигнал с феррозонда, установленного по оси OZп феррозондного датчика 1.12, стремится к нулевому.
Использование предлагаемого устройства в сравнение с прототипом обеспечивает повышение точности измерений за счет отсутствия ошибки, вызванной остаточным систематическим дрейфом гироскопа, а также отсутствия процедуры начальной выставки, что выгодно отличает предлагаемый магнитометрический инклинометр от прототипа.
Точность измерения углов с помощью измерителей ускорений (0.05 градуса) проверена в инклинометрах, описанных в прототипе и аналоге (МИНК-42-100/50 и ИГН-73-100/80 производства ООО “Арас-плюс”, г.Арзамас).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
Изобретение относится к промысловой геофизике и может использоваться при исследовании скважины. Техническим результатом изобретения является исключение начальной выставки и повышение точности определения азимута. Инклинометр содержит наземный вычислитель, связанный каротажным кабелем со скважинным прибором, который содержит температурный датчик, подключенный к одному из входов блока цифровой обработки, к другим входам которого подключены выходы измерителей ускорений и датчик угла поворота платформы. Кроме того, прибор содержит одноосный стабилизатор, на платформе которого жестко установлены измерители ускорений и датчик угла поворота платформы стабилизатора. Скважинный прибор дополнительно содержит на платформе трехкоординатный феррозондный датчик геомагнитного поля Земли, две оси чувствительности которого совпадают с осями чувствительности измерений ускорений, а третья - с продольной осью скважинного прибора. Выходы трехкоординатного феррозондового датчика соединены со входами блока цифровой обработки, выход которого соединен с наземным блоком и со входом ЦАП, который через усилитель мощности соединен с датчиком момента, разворачивающим платформу вокруг оси стабилизации. 3 ил.

Инклинометр, содержащий наземный вычислитель, связанный каротажным кабелем через наземный блок со скважинным прибором, при этом скважинный прибор содержит температурный датчик, подключенный к одному из входов блока цифровой обработки, одноосный стабилизатор, на платформе которого жестко установлены измерители ускорений, осями чувствительности ориентированные перпендикулярно оси стабилизации стабилизатора, датчик угла стабилизатора, своими выходами подключенный к входам блока цифровой обработки, к другим входам которого подключены выходы измерителей ускорений, отличающийся тем, что скважинный прибор дополнительно содержит на платформе трехкоординатный феррозондный датчик геомагнитного поля Земли, две оси чувствительности которого совпадают с осями чувствительности измерителей ускорений, а третья - с продольной осью прибора, выходы феррозондного датчика соединены со входами блока цифровой обработки, выход блока цифровой обработки соединен с наземным блоком и со входом ЦАП, который через усилитель мощности соединен с датчиком момента.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ измерения положения снаряда в скважине | 1982 |
|
SU1076573A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Инклинометр | 1990 |
|
SU1788224A1 |
| RU 2004786 C1, 15.12.1993 | |||
| RU 2002129647 A, 27.04.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА ПЛОСКОСТИ НАКЛОНЕНИЯ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165524C2 |
| US 4163324 A, 10.08.1979 | |||
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ГИБКИХ ТРУБ | 2013 |
|
RU2541366C1 |
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |

