Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для минимизации потребляемого тока статора при питании асинхронного электродвигателя от преобразователя частоты.
Известен электропривод переменного тока, содержащий асинхронный двигатель, трехфазный инвертор с ШИМ-регулятором тока, два датчика тока статора, с помощью которых реализуются обратные связи по фазным токам статора, датчик скорости, установленный на валу двигателя, с помощью которого реализуется обратная связь по скорости, регулятор скорости, блок расчета задания на момент двигателя, блок расчета задания модуля тока статора, блок задания фазных токов статора, блоки расчета фазных потокосцеплений ротора, блок расчета скольжения, блок задания частоты вращения поля статора, блок коррекции задания момента двигателя, с помощью которого формируется модуль вектора тока статора, в котором корректирующий сигнал определяется путем сравнения заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора, и суммируется с сигналом задания на момент двигателя [1].
Недостатками данного устройства являются сложность и малая точность адаптивных блоков расчета фазных потокосцеплений ротора, параметры которых изменяются при изменении скольжения, что снижает точность расчета требуемого сигнала коррекции.
Наиболее близким к изобретению по технической сути и достигаемому результату является электропривод переменного тока, содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум обмоткам статора асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулирования, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания, амплитудный вход которого соединен с выходом первого сумматора, выходы двух датчиков фазного тока статора соединены с входами другого сумматора фазных токов статора, а также соединены с двумя входами первой группы фазных входов блока вычисления параметра взаимной ориентации между векторами тока статора и другой переменной статора, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов блока вычисления параметра взаимной ориентации векторов, выход блока расчета параметра взаимной ориентации векторов соединен с отрицательным входом блока сравнения параметра взаимной ориентации векторов, положительный вход которого соединен с блоком задания параметра взаимной ориентации векторов, а выход блока сравнения параметра взаимной ориентации векторов подключен ко входу блока коррекции сигнала управления, амплитудным значением гармонических сигналов задания является напряжение, вектором другой переменной статора является вектор эдс статора, а параметром взаимной ориентации между векторами тока и эдс статора является тангенс угла между этими векторами, выход блока коррекции сигнала управления соединен с одним входом первого сумматора, со вторым входом которого соединен амплитудный выход блока задания сигналов управления, частотный выход которого соединен с частотным входом блока формирования мгновенных значений гармонических сигналов задания, фазные выходы которого также соединены со вторыми фазными входами блока расчета параметра взаимной ориентации между векторами тока и эдс статора [2].
Недостатками данного устройства являются сложность определения величины сигнала коррекции напряжения с использованием циклических операций, снижение точности в определении оптимального сигнала коррекции напряжения в пусковых режимах электропривода при насыщении магнитной цепи двигателя, снижение энергетических показателей электропривода при пуске.
Целью изобретения является улучшение энергетических показателей электропривода в режиме пуска за счет построения системы коррекции напряжения, осуществляющей выработку корректирующего сигнала с помощью поддержания оптимального значения тангенса угла между векторами тока и эдс статора, задаваемого с учетом насыщения двигателя.
Предлагаемый электропривод переменного тока содержит трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум обмоткам статора асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулирования, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания напряжения, амплитудный вход которого соединен с выходом первого сумматора, выходы двух датчиков фазного тока статора соединены с входами второго сумматора, а также соединены с двумя входами первой группы фазных входов блока вычисления положения вектора тока статора, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов блока вычисления положения вектора тока статора, первый выход которого соединен с отрицательным входом блока сравнения тангенса угла между векторами тока статора и эдс статора, положительный вход которого соединен с выходом блока задания тангенса угла между векторами тока статора и эдс статора, а выход этого блока сравнения подключен к входу блока коррекции сигнала управления, выход блока коррекции сигнала управления соединен с одним входом первого сумматора, со вторым входом которого соединен амплитудный выход блока задания сигналов напряжения, частотный выход которого соединен с частотным входом блока формирования мгновенных значений гармонических сигналов задания напряжения, фазные выходы которого также соединены со вторыми фазными входами блока вычисления положения вектора тока статора, в блоке вычисления положения вектора тока статора выполнен второй выход для вывода сигнала амплитуды вектора тока статора, который соединен с входом блока расчета действующего значения тока статора, выход которого соединен с входом блока задания тангенса угла между векторами тока статора и эдс статора, а блок коррекции сигнала управления выполнен в виде пропорционально-интегрального звена.
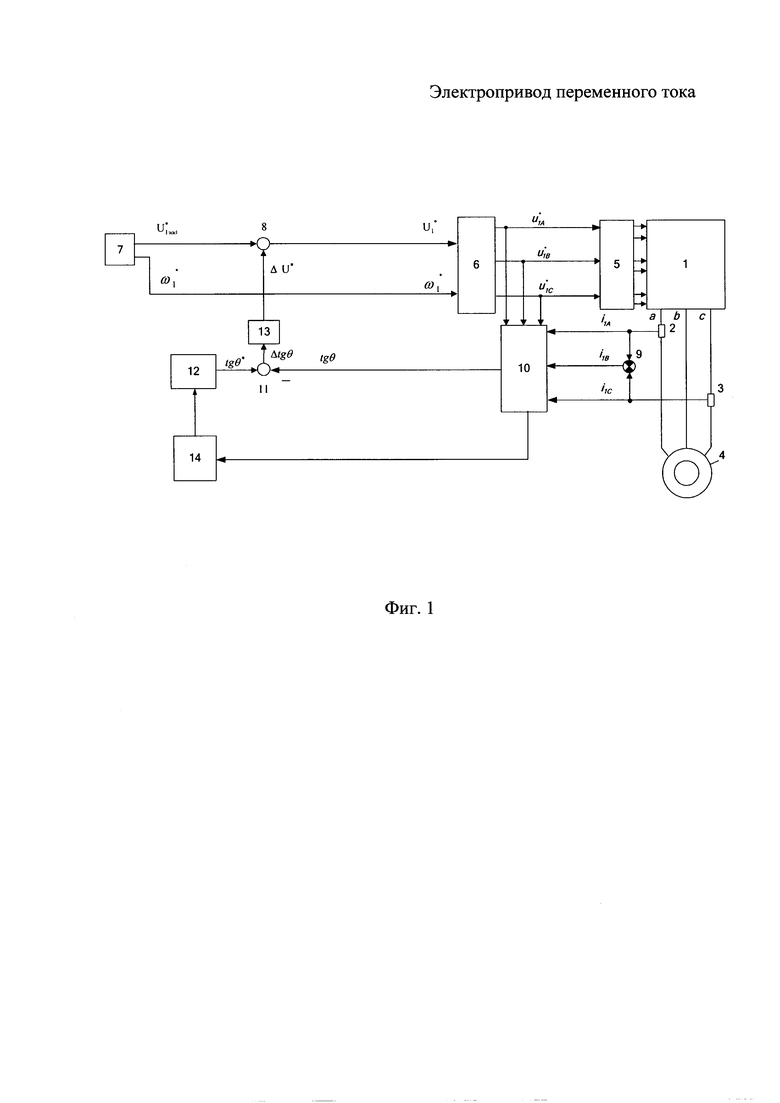
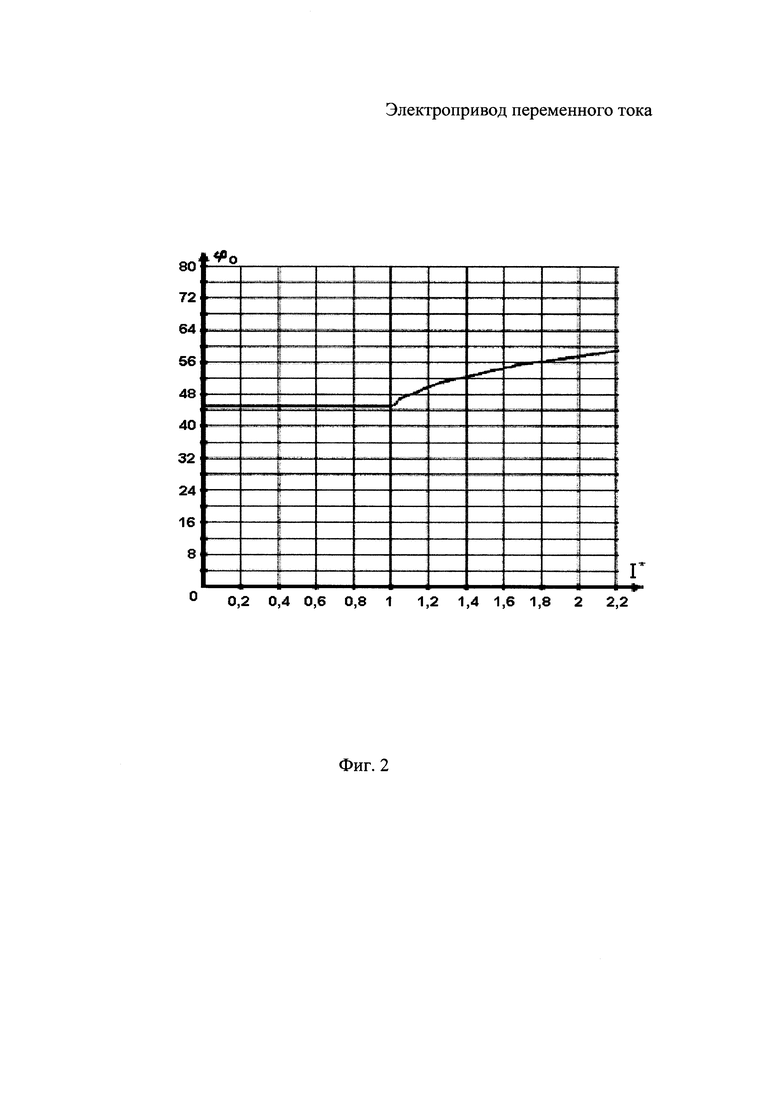
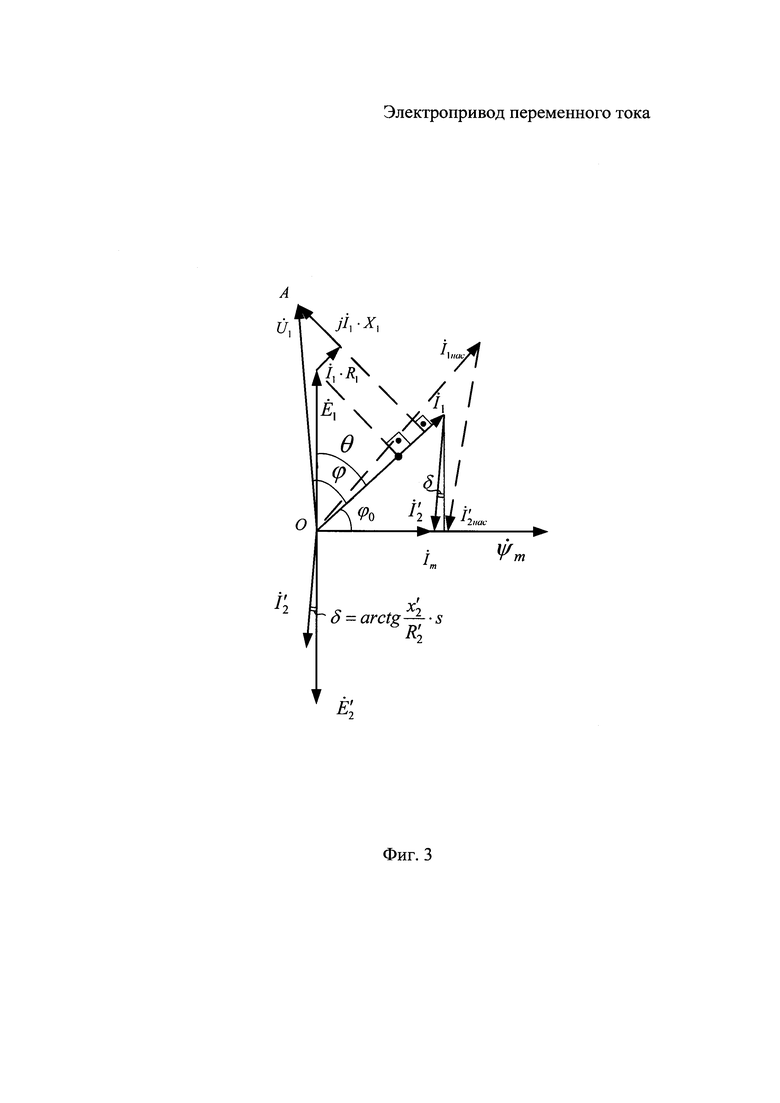
На фиг. 1 приведена функциональная схема электропривода переменного тока; на фиг. 2 приведен график зависимости оптимального значения угла между векторами тока статора и тока намагничивания φ0 от тока статора I1, построенный с использованием экспериментальных данных, с помощью которого задается оптимальная функциональная зависимость тангенса угла между вектором тока статора и эдс статора tgθ* от тока статора tgθ*=f(I1); на фиг. 3 приведена векторная диаграмма асинхронного двигателя для определения тангенса угла между векторами тока и эдс статора tgθ.
Электропривод переменного тока содержит инвертор 1, два силовых выхода которого соединены через датчики тока 2 и 3 с двумя обмотками статора асинхронного двигателя 4, а третий выход инвертора 1 соединен с третьей обмоткой статора двигателя 4 напрямую. Управляющие входы инвертора 1 соединены с выходами блока ШИМ-регулирования 5, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания напряжения 6. Блок задания сигналов управления напряжением питания двигателя 7 содержит амплитудный и частотный выходы, причем его частотный выход соединен напрямую с частотным входом блока формирования мгновенных значений гармонических сигналов задания 6, а амплитудный выход блока задания сигналов управления 7 соединен с одним входом первого сумматора 8, выход которого соединен с амплитудным входом блока формирования мгновенных значений гармонических сигналов задания напряжения 6. Выходы датчиков тока 2, 3 соединены с отрицательными входами второго сумматора тока 9, а также с двумя входами первой группы фазных входов блока вычисления положения вектора тока статора 10, еще с одним фазным входом которого соединен выход сумматора тока 9. Выходы блока формирования мгновенных значений гармонических сигналов задания напряжения 6 соединены со вторыми фазными входами блока вычисления положения вектора тока статора 10, первый выход которого соединен с отрицательным входом блока сравнения 11. Блок задания тангенса угла между векторами тока и эдс статора 12 соединен с положительным входом блока сравнения 11, выход блока сравнения 11 подключен к входу блока коррекции сигнала управления 13, выход которого подключен к другому входу сумматора 8. Второй выход блока вычисления положения вектора тока статора 10 соединен с входом блока вычисления действующего значения тока статора 14, выход которого соединен с входом блока задания тангенса угла между векторами тока и эдс статора 12.
Электропривод переменного тока работает следующим образом.
Инвертор 1 через датчики 2, 3 фазных токов питает статорные обмотки асинхронного двигателя 4 широтно-модулируемыми пульсациями силового напряжения, длительность которых определяется управляющими пульсациями, поступающими с выхода блока 5, осуществляющего ШИМ-модуляцию и регулирование напряжения. Формирование синусоидальных фазных сигналов задания на блок ШИМ-регулирования напряжения 5 производится блоком формирования мгновенных значений гармонических сигналов задания напряжения 6, вырабатывающим сигналы задания на напряжение каждой из фаз 



Блок задания сигналов управления 7 вырабатывает сигнал задания на частоту 

При изменении условий работы электропривода, в частности изменения нагрузки на валу двигателя, и регулировании частоты вращения, для обеспечения минимального значения тока статора ненасыщенного двигателя, когда ток статора не превышает номинального значения, при заданном значении статического момента на валу двигателя, не превышающего номинальный момент двигателя, необходимо изменять амплитуду напряжения 
Угол между векторами тока статора и эдс статора двигателя (фиг. 3) определяется

При условии φ0=45° желаемый угол θ* между векторами тока и эдс статора равен 45°, тогда вырабатываемый в блоке 12 выходной сигнал tgθ*=1, и если достигается реальное значение tgθ=1, то обеспечивается минимальное значение тока статора, при котором достигается заданное значение момента двигателя. Реальное значение tgθ определяется в блоке вычисления положения вектора тока статора 10, который осуществляет расчет модуля вектора тока статора и тангенса угла между векторами тока и эдс статора следующим образом.
На основании векторной диаграммы (фиг. 3) можно определить тангенс угла между векторами тока и эдс статора:

где 

Принимаем, что вектор напряжения статора 






где kc - согласующий коэффициент пропорциональности, выбор которого осуществляется из условий инвариантности мощности реальной трехфазной машины и приведенной двухфазной машины 
Модуль и пространственное положение вектора тока статора 

где k1 - коэффициент датчика тока.
При рассмотрении условия совпадения положения осей A и α вектор напряжения 

В режиме пуска для обеспечения момента двигателя, превышающего номинальное значение, ток статора должен быть больше номинального значения. При возрастании тока статора и его намагничивающей составляющей происходит насыщение магнитной цепи двигателя, снижается индуктивное сопротивление контура намагничивания, а магнитный поток двигателя увеличивается незначительно. В режиме пуска, когда ток статора превышает номинальное значение, оптимальный желаемый угол θ* между векторами тока статора и эдс становится меньше 45°, это показано на векторной диаграмме (фиг. 3). В режиме насыщения стали двигателя при росте тока статора угол θ* необходимо уменьшать, для этого необходимо уменьшать сигнал задания tgθ*, поступающий на узел сравнения 11. В блоке 14, представляющем собой пропорциональное звено, на вход которого со второго выхода блока 10 поступает сигнал, равный модулю вектора тока статора 

Сигнал с выхода блока 14 поступает на вход блока 12, осуществляющего выработку выходного сигнала tgθ* на основании функциональной зависимости оптимального тангенса угла от действующего значения тока статора tgθ*=f(I1). Зависимость оптимального угла между векторами тока статора и тока намагничивания φ0 от действующего значения тока статора I1, построенная с использованием экспериментальных данных, представлена на фиг. 2, с ее помощью, с использованием уравнения (2), определена функциональная зависимость tgθ*=f(I1). Эта функциональная зависимость заложена в блоке 12, например, в виде табличных значений.
Если ток статора меньше номинального значения, то tgθ*=1. Когда ток статора становится больше номинального значения, задание на величину тангенса угла tgθ* уменьшается в соответствии с функциональной зависимостью tgθ*=f(I1). Сигнал на выходе блока 12 определяется рассчитанной величиной действующего тока статора I1, полученной на основании обработки сигналов с датчиков тока статора 2 и 3.
На узле сравнения 11 производится сравнение выдаваемого блоком 12 значения tgθ* и рассчитанного в блоке 10 по уравнениям (3)-(11) значения tgθ и определяется разность Δtgθ. Этот сигнал поступает на вход блока 13, представляющий собой пропорционально-интегральное звено. Если разность Δtgθ не равна нулю, то на выходе блока 13 происходит изменение в нужном направлении сигнала коррекции ΔU, подаваемого на вход сумматора 8, когда разность Δtgθ становится равной нулю, сигнал коррекции ΔU на выходе блока 13 имеет постоянное значение.
Преимущество предлагаемого электропривода переменного тока заключается в энергосбережении в пусковом режиме при насыщенной магнитной цепи двигателя, путем минимизации тока статора, обеспечивающего заданный момент двигателя, за счет более простого и точного определения требуемого сигнала коррекции задания напряжения питания двигателя. В канале коррекции напряжения исключены циклические операции, что упрощает алгоритм расчета корректирующего сигнала и снижает требования к управляющему контроллеру.
Источники информации
1. Патент РФ №2447573, МПК H02P 27/04. Электропривод переменного тока. В.Н. Мещеряков, В.А. Зотов, О.В. Мещерякова. Опубл. 10.04.2012. Бюл. №10.
2. Патент РФ №2512873, МПК Н02P 27/06. Электропривод переменного тока. В.Н. Мещеряков, Т.В. Синюкова, О.В. Мещерякова. Опубл. 10.04.2014. Бюл. №10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
Изобретение относится к области электротехники и может быть использовано в регулируемом электроприводе переменного тока. Технический результат заключается в уменьшении тока статора в пусковом режиме, обеспечивающего заданный момент двигателя, повышении работоспособности устройства. В электропривод переменного тока, содержащий асинхронный двигатель и инвертор с ШИМ-регулятором, два датчика тока статора, блок задания частоты вращения поля статора и амплитуды напряжения, блок коррекции задания напряжения, содержащий блок вычислительных операций, осуществляющий выработку корректирующего сигнала задания напряжения в функции рассчитываемого параметра - тангенса угла между векторами тока и эдс статора, вычисляемого на основании измеренных значений фазных токов статора и сигналов задания на фазные напряжения двигателя, введен блок, изменяющий сигнал коррекции с учетом насыщения двигателя. Инвертором формируются фазные напряжения статора с частотой и амплитудой, необходимой для обеспечения заданного значения момента при условии минимизации потребления тока статора из сети с учетом насыщения двигателя. Электропривод работает с реально измеряемыми переменными, что упрощает алгоритм расчета корректирующего сигнала и снижает требования к управляющему контроллеру. 3 ил.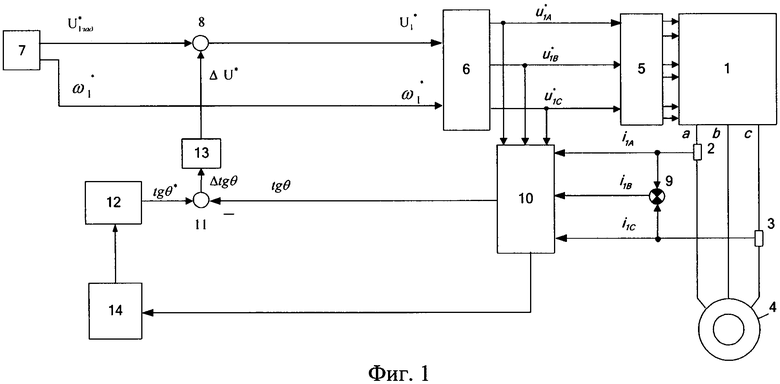
Электропривод переменного тока, содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум обмоткам статора асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулирования, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания напряжения, амплитудный вход которого соединен с выходом первого сумматора, выходы двух датчиков фазного тока статора соединены с входами второго сумматора, а также соединены с двумя входами первой группы фазных входов блока вычисления положения вектора тока статора, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов блока вычисления положения вектора тока статора, первый выход которого соединен с отрицательным входом блока сравнения тангенса угла между векторами тока статора и эдс статора, положительный вход которого соединен с выходом блока задания тангенса угла между векторами тока статора и эдс статора, а выход этого блока сравнения подключен к входу блока коррекции сигнала управления, выход блока коррекции сигнала управления соединен с одним входом первого сумматора, со вторым входом которого соединен амплитудный выход блока задания сигналов напряжения, частотный выход которого соединен с частотным входом блока формирования мгновенных значений гармонических сигналов задания напряжения, фазные выходы которого также соединены со вторыми фазными входами блока вычисления положения вектора тока статора, отличающийся тем, что в блоке вычисления положения вектора тока статора выполнен второй выход для вывода сигнала амплитуды вектора тока статора, который соединен с входом блока расчета действующего значения тока статора, выход которого соединен с входом блока задания тангенса угла между векторами тока статора и эдс статора, а блок коррекции сигнала управления выполнен в виде пропорционально-интегрального звена.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| СПОСОБ ГИБКИ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2201308C2 |
| DE 69114120 T2, 04.04.1996 | |||
| JP 4108680 B2,14.09.2005 | |||
| US 2011043149 A1, 24.02.2011 | |||
| EP 790701 B1, 16.05.2001 | |||
| WO 1992004783 A1, 19.03.1992. | |||

