Изобретение относится к области авиастроения, а именно к бортовому пилотажно-навигационному оборудованию самолетов и вертолетов, в которых система измерения курса является основным навигационным средством.
На борту современных летательных аппаратов (далее - ЛА) для измерения курса широкое применение нашли системы на основе гироскопических устройств.
Гироскопические курсовые системы, как правило, объединяют в своем составе гироскопический и магнитный датчики, которые вычисляют курс на основе информации о горизонтальных составляющих угловой скорости вращения и магнитного поля Земли.
Известна резервная система индикации курса и пространственного положения самолета, содержащая гироскопы, акселерометры, магнитный датчик, которая используется для нахождения северного магнитного полюса (RU 2236697 С2, G05D 1/0077, публ. 20.09.2004).
Однако указанная система не удовлетворяет требованиям, предъявляемым к бортовому пилотажно-навигационному оборудованию для летательных аппаратов, пилотируемых вблизи северного и южного полюсов. В этих районах магнитный датчик имеет большие погрешности, не позволяющие с требуемой точностью определить курс летательного аппарата. Горизонтальная составляющая скорости Земли в этих районах также незначительна и не позволяет с необходимой точностью измерить курс с помощью гироскопов.
Известно устройство для синтезированного расчета избыточного положения и избыточного курса воздушного судна (US 6955082 В2, G01C 21/20, G05D 1/00, G05D 1/08, публ. 16.12.2004), в котором при расчетах курса используются угловые скорости летательного аппарата, измеренные по его осям, воздушные параметры и компоненты магнитного поля.
Однако компоненты магнитного поля около земных полюсов уменьшаются и не позволяют с необходимой точностью измерить курс воздушного судна.
Известно устройство для оценки скорости и курса самолета независимо от магнитных измерений (US 2018120111 A1, B64D 43/02, G01C 21/16, G01C 23/00, G05D 1/08, публ. 03.05.2018), в котором курс самолета определяется гироскопическими датчиками с использованием горизонтальной составляющей скорости Земли. Для увеличения точности он корректируется поправками от спутниковой навигационной системы и доплеровского измерителя скорости.
Однако вблизи земных полюсов горизонтальная составляющая скорости земли становится незначительной и гироскопические датчики на высоких широтах курс не измеряют.
Наиболее близким к используемому изобретению является комплексная система определения курса, которая содержит гироскопическую курсовую систему, спутниковую навигационную систему, доплеровский измеритель скорости (RU 2178146 C1, G01C 23/00, публ. 10.01.2002).
Недостатками известной комплексной системы определения курса являются: низкая точность определения курса на высоких широтах из-за использования для этой цели только спутниковой навигационной системы и доплеровского измерителя скорости.
Создание устройства для определения курса направлено на повышение точности и надежности определения курса в высоких широтах, где гироскопические и магнитные датчики не могут измерить курс летательного аппарата.
Техническая проблема, решаемая заявляемым изобретением, заключается в создании устройства, в котором курс летательного аппарата определяется без использования параметров угловой скорости вращения и параметров магнитного поля Земли.
Технический результат, получаемый при осуществлении изобретения, заключается в повышении точности и надежности определения курса в высоких широтах, а также в уменьшении массогабаритных характеристик бортового пилотажно-навигационного оборудования, который достигается за счет комплексирования сигналов гироскопической курсовой системы, спутниковой навигационной системы, системы воздушных сигналов, доплеровского измерителя составляющих скоростей летательного аппарата относительно поверхности Земли и за счет дублирования индикаторов курса.
Для достижения технического результата предлагается устройство для определения курса летательного аппарата, содержащее совокупность соединенных соответствующими каналами передачи данных элементов таким образом, что передача и/или прием сигналов между этими элементами осуществляется через соответствующие входы/выходы, предусмотренные в указанных элементах для передачи и/или приема информационно-электрических сигналов, кроме того, схема соединения указанных элементов выполнена с возможностью взаимодействия данных элементов согласно соответствующему алгоритму приема/передачи/распределения информационно-электрических сигналов, причем указанными элементами схемы являются такие элементы, как пульт-вычислитель навигационный, включающий в себя приемник спутниковой навигационной системы, систему электронной индикации, гироскопическую курсовую систему, гировертикаль, высотомер, доплеровский измеритель составляющих скорости летательного аппарата относительно поверхности Земли, систему воздушных сигналов; антенну спутниковой навигационной системы, при этом, в пульт-вычислитель навигационный введена схема определения курса, первый вход которой соединен выходом доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, второй вход соединен с первым выходом гироскопической курсовой системы, третий вход соединен с выходом системы воздушных сигналов, четвертый вход соединен с выходом приемника спутниковой навигационной системы, первый выход соединен с входом гироскопической курсовой системы, второй выход соединен с входом системы электронной индикации, причем первый выход гировертикали соединен с входом доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли.
В одном из вариантов выполнения в приемник спутниковой навигационной системы, расположенный в пульте-вычислителе навигационном введена схема дифференциальной коррекции, корректирующая значения текущих координат летательного аппарата.
В другом из вариантов выполнения в высотомер введена схема доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, выход которого соединен с первым входом схемы определения курса, а вход с первым выходом гировертикали.
В другом из вариантов выполнения продольная скорость летательного аппарата комплексируется с помощью фильтра Калмана по сигналам от доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли и системы воздушных сигналов, поступающим на первый и третий входы схемы определения курса соответственно.
В другом из вариантов выполнения после начальной выставки гироскопической курсовой системы ее выходной сигнал, поступающий на второй вход схемы определения курса, корректируется фильтром Калмана по сигналам доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, системы воздушных сигналов и спутниковой навигационной системы, поступающим на первый, третий и четвертый входы схемы определения курса соответственно, причем эта коррекция отключается при маневрах воздушного судна.
В другом из вариантов выполнения в пульт-вычислитель навигационный введен индикатор, вход которого соединен с третьим выходом схемы определения курса.
Конструкция устройства для определения курса поясняется следующими рисунками:
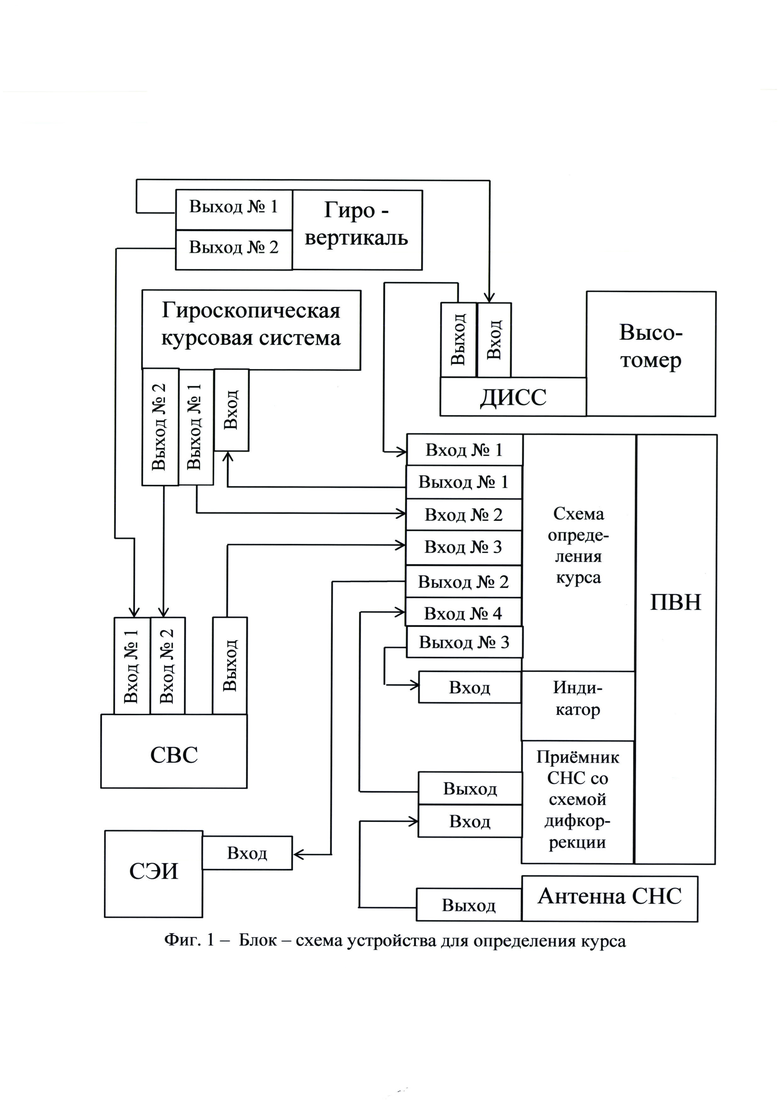
фиг. 1 - блок-схема устройства для определения курса;
фиг. 2 - лицевая панель пульта-вычислителя навигационного;
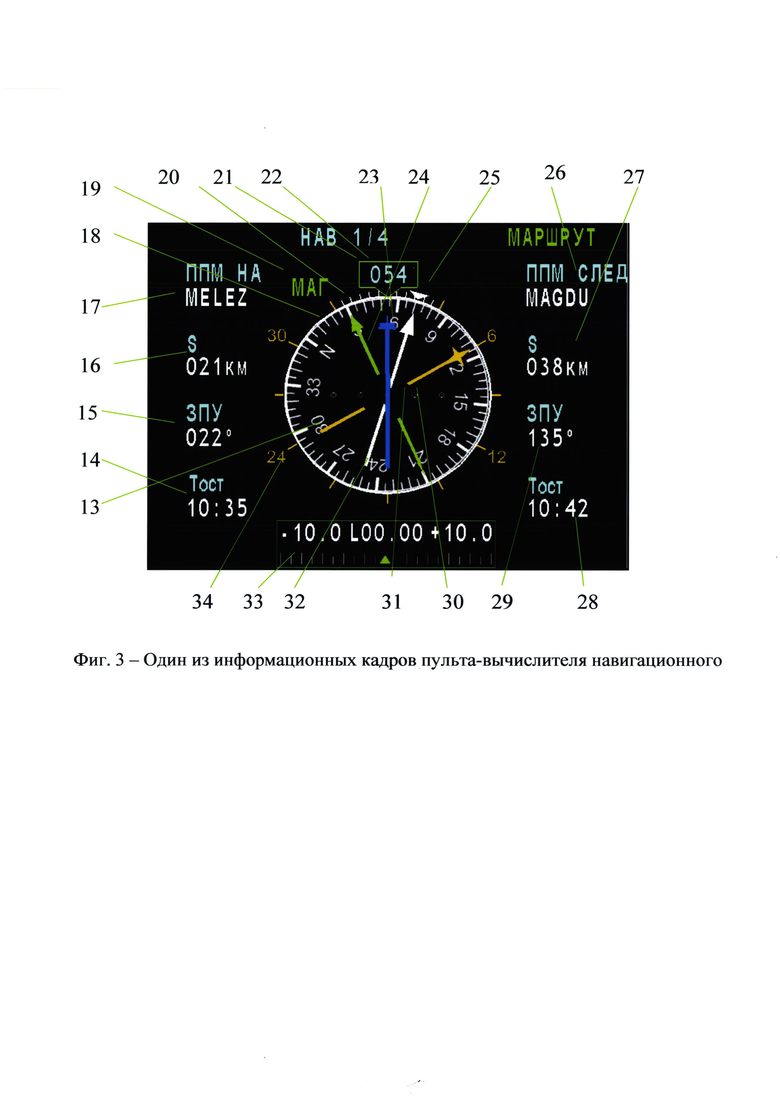
фиг. 3 - один из информационных кадров пульта-вычислителя навигационного;
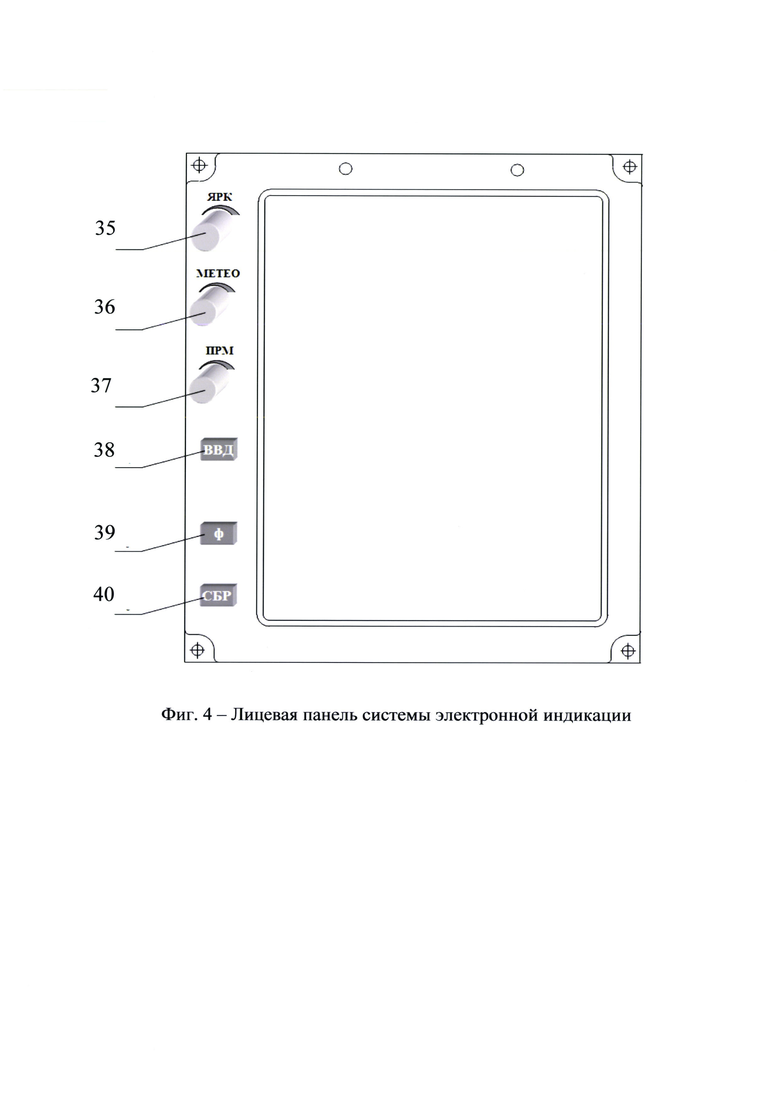
фиг. 4 - лицевая панель системы электронной индикации;
фиг. 5 - один из информационных кадров системы электронной индикации;
фиг. 6 - вычислитель системы воздушных сигналов;
фиг. 7 - внешний вид курсового гироскопа ГК-1 гироскопической курсовой системы;
фиг. 8 - внешний вид гировертикали МГВ-4 В.
Пояснения к чертежам
Устройство для определения курса летательного аппарата содержит изделия и элементы, которые соединены соответствующими каналами передачи данных таким образом, что передача и/или прием сигналов между этими элементами осуществляется через соответствующие входы/выходы, предусмотренные в указанных элементах для передачи и/или приема информационно-электрических сигналов, кроме того, схема соединения указанных элементов выполнена с возможностью взаимодействия данных элементов согласно соответствующему алгоритму
приема/передачи/распределения информационно-электрических сигналов.
Устройство для определения курса содержит следующие изделия (фиг. 1):
- пульт-вычислитель навигационный (далее - ПВН), включающий в себя приемник спутниковой навигационной системы (далее - СНС) со схемой дифференциальной коррекции, схему определения курса и индикатор пульта-вычислителя навигационного.
Вход приемника СНС со схемой дифференциальной коррекции соединен с выходом антенны СНС, а выход - с четвертым входом схемы определения курса.
Первый вход схемы определения курса, расположенной в ПВН, соединен с выходом схемы доплеровского измерителя составляющих скорости (далее -ДИСС) летательного аппарата относительно поверхности Земли, расположенного в высотомере. Второй вход схемы определения курса соединен с первым выходом гироскопической курсовой системы. Третий вход схемы определения курса соединен с выходом системы воздушных сигналов (далее -СВС). Четвертый вход схемы определения курса соединен с выходом приемника СНС, включающего схему дифференциальной коррекции. Первый выход схемы определения курса соединен с входом гироскопической курсовой системы, второй выход - с входом системы электронной индикации, а третий выход соединен с входом индикатора ПВН;
- гироскопическую курсовую систему, первый выход которой соединен со вторым входом схемы определения курса, расположенной в ПВН, второй выход
- со вторым входом системы воздушных сигналов, а вход с первым выходом схемы определения курса, расположенной в ПВН;
- систему электронной индикации (далее - СЭИ), вход которой соединен со вторым выходом схемы определения курса, расположенной в ПВН;
- высотомер со схемой доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, у которого вход ДИСС соединен с первым выходом гировертикали, а выход ДИСС - соединен с первым входом схемы определения курса, расположенной в ПВН;
- систему воздушных сигналов, выход которой соединен с третьим входом схемы определения курса, расположенной в ПВН, первый вход - со вторым выходом гировертикали, а второй вход со вторым выходом гироскопической курсовой системы.
- антенну СНС, выход которой соединен с входом приемника спутниковой навигационной системы, включающего схему дифференциальной коррекции.
- гировертикаль, первый выход которой соединен с входом ДИСС, а второй выход с первым входом системы воздушных сигналов.
Описание устройств, реализующих изобретение:
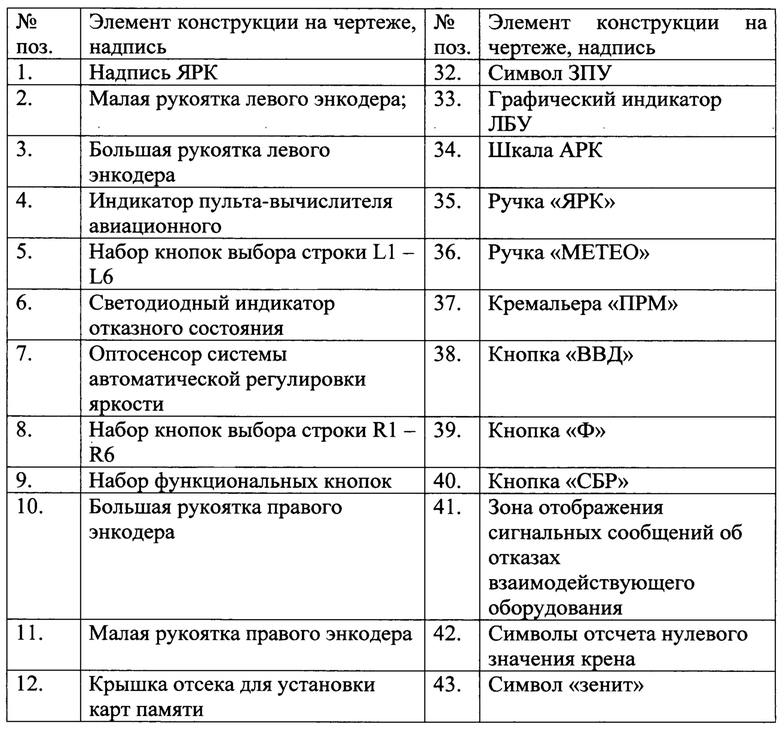
На фиг. 2 изображена лицевая панель пульта-вычислителя навигационного, который предназначен для решения задач полета в соответствии с требованиями зональной навигации и имеет на лицевой панели следующие элементы и надписи:
- надпись ЯРК (1) (информирует о том, что большая рукоятка левого энкодера предназначена для регулировки яркости экрана);
- малая рукоятка левого энкодера (2);
- большая рукоятка левого энкодера (3) (рукоятка ЯРК);
- индикатор пульта-вычислителя авиационного (4);
- набор кнопок выбора строки L1 - L6 (5);
- светодиодный индикатор отказного состояния (6);
- оптосенсор системы автоматической регулировки яркости (7);
- набор кнопок выбора строки R1 - R6 (8);
- набор функциональных кнопок (9);
- большая рукоятка правого энкодера (10);
- малая рукоятка правого энкодера (11);
- крышка отсека для установки карт памяти (12).
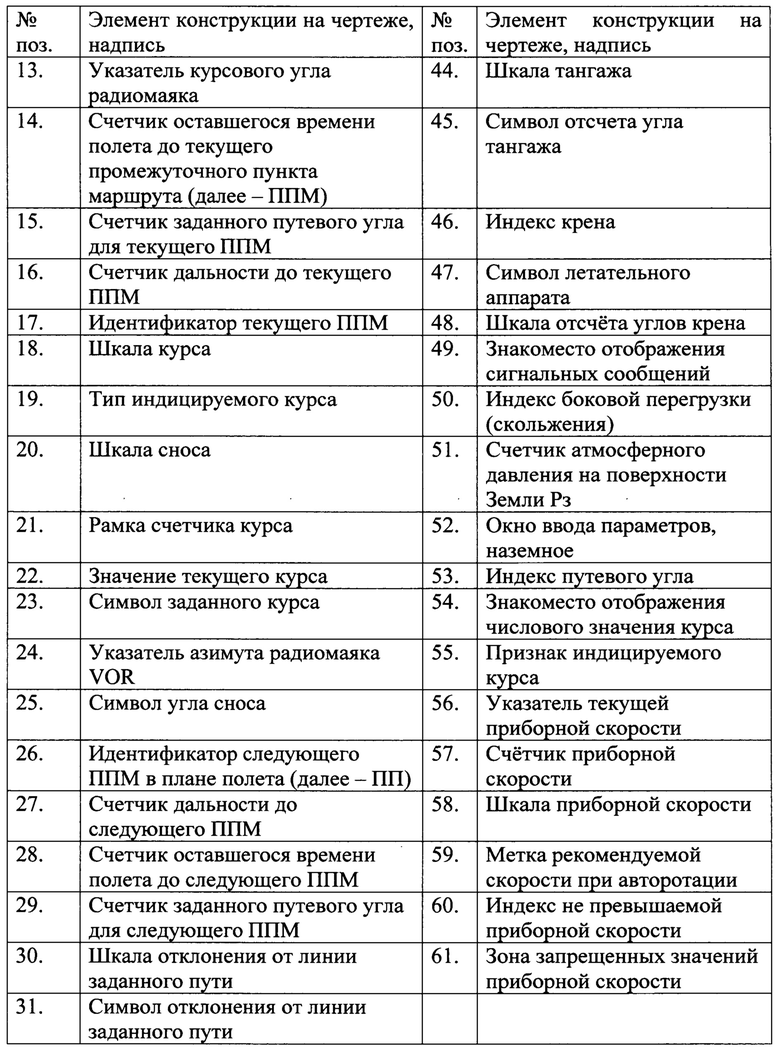
На фиг. 3 показан один из информационных кадров пульта-вычислителя навигационного, на котором изображены следующие элементы и надписи:
- указатель курсового угла радиомаяка (13);
- счетчик оставшегося времени полета до текущего ППМ (14);
- счетчик заданного путевого угла для текущего ППМ (15);
- счетчик дальности до текущего ППМ (16);
- идентификатор текущего ППМ (17);
- шкала курса (18);
- тип индицируемого курса (19);
- шкала сноса (20);
- рамка счетчика курса (21);
- значение текущего курса (22);
- символ заданного курса (23);
- указатель азимута радиомаяка VOR (24);
- символ угла сноса (25);
- идентификатор следующего ППМ в ПП (26);
- счетчик дальности до следующего ППМ (27);
- счетчик оставшегося времени полета до следующего ППМ (28);
- счетчик заданного путевого угла для следующего ППМ (29);
- шкала отклонения от линии заданного пути (30);
- символ отклонения от линии заданного пути (31); символ ЗПУ (32);
- графический индикатор ЛБУ (33);
шкала АРК (34).
На фиг. 4 изображена лицевая панель системы электронной индикации, предназначенная для обеспечения пилота пилотажно-навигационной информацией, на котором изображены следующие элементы и надписи:
- ручка «ЯРК» регулирует общую яркость изображения (35);
- ручка «МЕТЕО» регулирует относительную яркость изображения метеоинформации (36);
- кремальера «ПРМ» изменяет значения параметров, осуществляет перемещение курсора и вызов информационных окон (37);
- кнопка «ВВД» осуществляет ввод выбранного формата и выставленного значения параметра (38);
- кнопка «Ф» осуществляет вызов форматов изображения (39);
- кнопка «СБР» осуществляет возврат к исходному состоянию в режиме ввода параметров или выбора форматов, а также снятие с индикации отказной информации (40).
На фиг. 5 показан пример информационного кадра системы электронной индикации, на котором изображены следующие элементы и надписи:
- зона отображения сигнальных сообщений об отказах взаимодействующего оборудования (41);
- символы отсчета нулевого значения крена (42);
- символ «зенит» (43);
- шкала тангажа (44);
- символ отсчета угла тангажа (45);
- индекс крена (46);
- символ летательного аппарата (47);
- шкала отсчета углов крена (48);
- знакоместо отображения сигнальных сообщений (49);
- индекс боковой перегрузки (скольжения) (50);
- счетчик атмосферного давления на поверхности Земли Рз (51);
- окно ввода параметров, наземное (52);
- индекс путевого угла (индекс в виде треугольника, перемещающийся в соответствии со значением путевого угла относительно шкалы курса) (53);
- знакоместо отображения числового значения курса (в знакоместе отображается рамка и трехразрядный счетчик курса, принимающий значение параметра от схемы определения курса, расположенной в ПВН). При индикации магнитного курса используется магнитное склонение (54);
- признак индицируемого курса (выбирается вид индицируемого курса, при истинном курсе отображается надпись: «ИК», при магнитном курсе отображается надпись: «МК») (55);
- указатель текущей приборной скорости (56);
- счетчик приборной скорости (57);
- шкала приборной скорости (58);
- метка рекомендуемой скорости при авторотации (59);
- индекс не превышаемой приборной скорости (60);
- зона запрещенных значений приборной скорости (61). Устройство работает следующим образом.
Взаимодействие бортового оборудования в устройстве для определения курса, имеющее отличительные признаки изобретения, показано на схеме (фиг. 1). Пульт-вычислитель навигационный осуществляет непрерывное счисление текущих координат летательного аппарата в инерциальном или курсовоздушном режимах (фиг. 2). Приемник спутниковой навигационной системы, расположенный в пульте-вычислителе навигационном, осуществляет коррекцию результатов счисления для решения задачи полета в соответствии с требованиями зональной навигации.
С целью повышения точности определения координат летательного аппарата в приемник спутниковой навигационной системы установлена схема дифференциальной коррекции. Спутниковые системы дифференциальной коррекции состоят из нескольких наземных станций, координаты которых известны с высокой точностью. С помощью СНС они определяют свои координаты и вычисляют разницу между измеренными координатами и своими известными координатами. Вычисленная разница передается на спутники. Спутники эту разницу в своих сигналах посылают потребителям.
Схема дифференциальной коррекции, расположенная в приемнике СНС пульта-вычислителя навигационного, получая от спутников информацию о разнице координат наземных станций, вводят поправки в вычисленные координаты летательного аппарата. Использование схемы дифференциальной коррекции позволяет увеличить точность определения координат летательного аппарата на порядок.
Гироскопические курсовые системы для определения курса летательного аппарата обычно используют горизонтальные составляющие вектора угловой скорости вращения Земли или магнитного поля Земли. Однако вблизи полюсов эти составляющие уменьшаются и не позволяют измерить курс летательного аппарата с необходимой точностью. В данном устройстве измерение курса проводится путем измерения путевого угла и угла сноса летательного аппарата. Наличие спутниковой навигационной системы с подсистемой дифференциальной коррекции на борту воздушного судна позволяет с высокой точностью измерять координаты летательного аппарата.
Так как угол в истинном горизонте между направлением на Север и траекторией летательного аппарата по часовой стрелке является путевым углом, то знание текущих координат воздушного судна позволяет с высокой точностью определить его путевой угол.
Курс летательного аппарата определяется из путевого угла путем вычитания угла сноса от действия ветра. Влияние ветра определяется с помощью ДИСС, входящего в высотомер по формуле [1]:
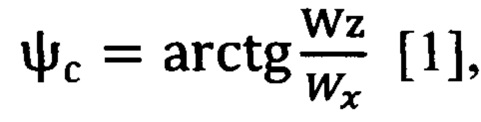 где
где
 - это угол сноса летательного аппарата;
- это угол сноса летательного аппарата;
Wx - это продольная скорость летательного аппарата относительно Земли;
Wz - это поперечная скорость летательного аппарата относительно Земли.
Однако спутниковая навигационная система и доплеровский измеритель составляющих скорости летательного аппарата относительно поверхности Земли являются радиотехническими устройствами, которые подвержены помехам, имеют перерывы в своей работе и повышенные погрешности на маневренных участках полета. Поэтому курс, полученный с использованием спутниковых сигналов и доплеровского измерителя составляющих скорости, будет иметь прерывистый характер. Для повышения точности его измерения в начале полета определение курса проводится на прямолинейном участке. За это время показания курса усредняются, и усредненный курс передается в гироскопическую курсовую систему (фиг. 7). Таким образом, начальная выставка гироскопической курсовой системы осуществляется не на земле, а в воздухе, сразу после взлета по сигналам спутниковой навигационной системы и доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли.
В дальнейшем курс летательного аппарата определяется по сигналам курса гироскопической системы, имеющим непрерывный характер.
Сигналы с гироскопической курсовой системы подаются в схему определения курса, расположенную в ПВН, после чего комплексируется с помощью фильтра Калмана по сигналам доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, системы воздушных сигналов и спутниковой навигационной системы. Применяемый в устройстве для измерения курса фильтр Калмана - это известный эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений. Фильтр Калмана предназначен для рекурсивного дооценивания вектора состояния априорно известной динамической системы. Описание фильтра Калмана приведено в книге «Статическая оптимизация навигационных систем» / Ривкин С.С. и др. - Л.: Судостроение, 1876. Затем уточненное значение курса выдается потребителям и поступает на индикаторы пилоту.
Для повышения точности измерения курса при маневрах летательного аппарата это комплексирование отключается.
Данное устройство позволяет определять курс летательного аппарата вблизи полюсов Земли с высокой точностью, т.к. при определении курса в нем не используются значения угловой скорости вращения и магнитного поля Земли.
С целью повышения точности определения курса, при расчете угла сноса в данном устройстве после начальной выставки курса продольная скорость летательного аппарата Wx, вычисляется путем комплексирования с помощью фильтра Калмана сигналов доплеровского измерителя, составляющих скорости летательного аппарата относительно поверхности Земли и системы воздушных сигналов. Пилоту уточненный сигнал курса поступает на систему электронной индикации (фиг. 4) и на индикатор пульта-вычислителя навигационного (фиг. 2), что повышает надежность предлагаемого устройства.
Технический результат, заключающийся в повышении точности, надежности, уменьшении массогабаритных характеристик бортового пилотажно-навигационного оборудования достигается за счет интегрирования элементов устройства, в частности совмещении радиовысотомера с доплеровским измерителем составляющих скорости летательного аппарата относительно поверхности Земли.
Введение в пульт-вычислитель навигационный схемы дифференциальной коррекции позволяет увеличить точность определения курса летательного аппарата. Повышение точности определения курса также достигается комплексированием с помощью алгоритма Калмана сигнала гироскопической курсовой системы с сигналами доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, системы воздушных сигналов и спутниковой навигационной системы. Таким образом, на высоких широтах обеспечивается измерение курса летательных аппаратов с необходимой точностью.
Введение в пульт-вычислитель навигационный индикатора позволяет продублировать пилоту информацию о курсе и увеличить надежность устройства для определения курса.
В настоящее время разработана схема представленного устройства для определения курса.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| АВТОНОМНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1992 |
|
RU2110078C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |




Изобретение относится к области авиастроения, а именно к бортовому пилотажно-навигационному оборудованию летательных аппаратов, в которых система измерения курса является основным навигационным средством. Для определения курса летательного аппарата по данному изобретению начальная выставка гироскопической курсовой системы осуществляется в полете по разнице путевого угла, определяемого спутниковой навигационной системой, и угла сноса, определяемого доплеровским измерителем составляющих скорости летательного аппарата относительно поверхности Земли. После начальной выставки курс летательного аппарата определяется по сигналу с гироскопической курсовой системы, который комплексируется с помощью фильтра Калмана по сигналам от доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, системы воздушных сигналов и спутниковой навигационной системы. Технический результат - повышение точности и надежности определения курса в высоких широтах, уменьшение массогабаритных характеристик бортового пилотажно-навигационного оборудования. 5 з.п. ф-лы, 8 ил.
1. Устройство для определения курса летательного аппарата, содержащее совокупность соединенных соответствующими каналами передачи данных элементов таким образом, что передача и/или прием сигналов между этими элементами осуществляется через соответствующие входы/выходы, предусмотренные в указанных элементах для передачи и/или приема информационно-электрических сигналов, кроме того, схема соединения указанных элементов выполнена с возможностью взаимодействия данных элементов согласно соответствующему алгоритму приема/передачи/распределения информационно-электрических сигналов, причем указанными элементами схемы являются такие элементы, как пульт-вычислитель навигационный, включающий в себя приемник спутниковой навигационной системы, систему электронной индикации, гироскопическую курсовую систему, гировертикаль, высотомер, доплеровский измеритель составляющих скорости летательного аппарата относительно поверхности Земли, систему воздушных сигналов, антенну спутниковой навигационной системы, отличающееся тем, что в пульт-вычислитель навигационный введена схема определения курса, первый вход которой соединен выходом доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, второй вход соединен с первым выходом гироскопической курсовой системы, третий вход соединен с выходом системы воздушных сигналов, четвертый вход соединен с выходом приемника спутниковой навигационной системы, первый выход соединен с входом гироскопической курсовой системы, второй выход соединен с входом системы электронной индикации, причем первый выход гировертикали соединен с входом доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли.
2. Устройство для определения курса по п. 1, отличающееся тем, что в приемник спутниковой навигационной системы, расположенный в пульте вычислителя навигационного, введена схема дифференциальной коррекции, корректирующая значения текущих координат летательного аппарата.
3. Устройство для определения курса по п. 1, отличающееся тем, что в высотомер введена схема доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, выход которого соединен с первым входом схемы определения курса, а вход - с первым выходом гировертикали.
4. Устройство для определения курса по п. 1, отличающееся тем, что продольная скорость летательного аппарата комплексируется с помощью фильтра Калмана по сигналам от доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли и системы воздушных сигналов, поступающим на первый и третий входы схемы определения курса соответственно.
5. Устройство для определения курса по п. 1, отличающееся тем, что после начальной выставки гироскопической курсовой системы ее выходной сигнал, поступающий на второй вход схемы определения курса, комплексируется фильтром Калмана по сигналам доплеровского измерителя составляющих скорости летательного аппарата относительно поверхности Земли, системы воздушных сигналов и спутниковой навигационной системы, поступающим на первый, третий и четвертый входы схемы определения курса соответственно, причем эта коррекция отключается при маневрах воздушного судна.
6. Устройство для определения курса по п. 1, отличающееся тем, что в пульт-вычислитель навигационный введен индикатор, вход которого соединен с третьим выходом схемы определения курса.
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2009 |
|
RU2393429C1 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| RU 213778 U1, 28.09.2022 | |||
| Вибрационный питатель к погрузочной машине | 1961 |
|
SU145174A1 |
| US 11029159 B2, 08.06.2021. | |||
