Изобретение относится к области информационно-измерительных систем и может быть использовано для робастной фильтрации стохастических сигналов и параметров состояния стохастических систем в условиях неопределенности вероятностных характеристик помех измерения.
Известен фильтр стохастических сигналов и параметров состояния стохастических систем, обеспечивающий оптимальную по среднеквадратическому критерию оценку измеряемого сигнала или вектора состояния, - фильтр Калмана [Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 2004. - 304с.; Синицын И.Н. Фильтры Калмана и Пугачева. - М.: Логос, 2006. - 640с.]. Недостатком данного фильтра является необходимость точного априорного задания вероятностных характеристик помех измерения оцениваемого сигнала, т.к. для реальных информационно-измерительных систем, функционирующих в условиях различных возмущений, параметры помех измерения или меняются случайным образом во времени, или известны приближенно [A.Ferrero, R.Ferrero, W.Jiang, S.Salicone. The Kalman Filter Uncertainty Concept in the Possibility Domain, IEEE Trans. Instrum. Meas. 68 (2019), Р.4335-4347].
Известны фильтры, использующие для обеспечения устойчивости процесса фильтрации при априорной неопределенности интенсивности помех измерения введение эмпирических масштабных коэффициентов при вычислении апостериорной ковариационной матрицы или дисперсионной матрицы помех измерения [E.P. Herrera, H. Kaufmann. Adaptive methods of Kalman filtering for personal positioning systems, in: 23rd Int. Tech. Meet. Satell. Div. Inst. Navig. 2010, ION GNSS 2010; Патент № 1639377. Модифицированный нелинейный фильтр Калмана, СССР, Н03Н 21/00; Патент № 1651355. Регуляризованный фильтр Калмана, СССР, Н03Н 21/00; Патент № 1800588. Адаптивный фильтр Калмана, СССР, Н03Н 21/00; Патент № 2160496. Модифицированный фильтр Калмана, РФ, Н03Н 21/00]. Недостатком этих способов является отсутствие строгих критериев выбора масштабных коэффициентов и процедуры их вычисления, а также обоснования повышения точности фильтрации, что не позволяет обеспечить требуемую точность и устойчивость процесса фильтрации при отсутствии априорного задания вероятностных характеристик помех измерения оцениваемого сигнала. Известен также фильтр, использующий для обеспечения устойчивости калмановской фильтрации расширение размерности вектора состояния [D.Wang, H.Ly, J.Wu. Augmented Cubature Kalman filter for nonlinear RTK/MIMU integrated navigation with non-additive noise, Measurement. 97, 2017, р.р.111-125.]. Недостатком данного способа являются существенные вычислительные затраты на его реализацию. Наиболее близким к предлагаемому фильтру является фильтр, обеспечивающий робастную оценку измеряемого сигнала на основе минимизации на текущем интервале времени нелинейного функционала, ядро которого определяется наиболее неблагоприятным классом распределения помехи измерения [Huber P.J., Ronchetti E.M. Robust statistics. New Jersey: John Wiley Sons, 2009. 371 с.; Цыпкин Я.З., Поляк Б.Т. Огрубленный метод максимального правдоподобия // Динамика систем. Математические методы теории колебаний. Горький. 1977. № 12.; Хьюбер П. Дж. Робастность в статистике / Пер. с англ. под ред. Я.З.Цыпкина. - М.: Мир, 1984. 304 с.].
Недостатком данного фильтра является невозможность робастного оценивания в реальном времени динамических процессов в силу большого объема вычислительных затрат, связанных с поиском глобального минимума многомерной нелинейной случайной функции в реальном времени. Технический результат изобретения заключается в повышении быстродействия и точности робастной фильтрации динамических процессов, а также сокращении вычислительных затрат за счет реализации робастного фильтра измеряемого сигнала в дифференциальной форме.
Поставленная задача возникает в управляющих и информационно-измерительных системах, функционирующих в условиях неопределенных возмущений наблюдаемого объекта и помех измерителя.
Технический результат достигается тем, что в устройство введены три блока векторного функционального преобразования, два блока матричного функционального преобразования, блок вычитания векторов, блок умножения матриц, блок умножения матрицы на вектор, блок суммирования векторов и блок интегрирования вектора, входом устройства является вход уменьшаемого блока вычитания векторов, вход вычитаемого которого соединен с выходом второго блока векторного функционального преобразования, а выход подключен ко входу третьего блока векторного функционального преобразования, выход которого подключен к К-размерному входу блока умножения матрицы на вектор, N*К- размерный вход которого соединен с выходом блока умножения матрицы на матрицу, N*N - размерный вход которого соединен с выходом первого блока матричного функционального преобразования, а N*К - размерный вход соединен с выходом второго блока матричного функционального преобразования, выход блока умножения матрицы на вектор подключен к первому входу блока суммирования векторов, второй вход которого соединен с выходом первого блока векторного функционального преобразования, а выход подключен ко входу блока интегрирования вектора, выход которого подключен ко входам первого и второго блоков векторного функционального преобразования, первого и второго блоков матричного функционального преобразования, а также является выходом устройства.
В основу работы устройства положены следующие теоретические результаты.
Динамический объект, вектор состояния которого х подлежит оцениванию, описывается стохастическим дифференциальным уравнением вида:

где  известные векторная и матричная функции размерности, соответственно, N и N*M,
известные векторная и матричная функции размерности, соответственно, N и N*M,

и измеряется нелинейным наблюдателем

где z - вектор измерений размерности К,

В практических приложениях в качестве основных классов распределений рассматриваются, как правило, распределения:
- с плотностью
- распределения с ограниченными средними квадратами (
- «засоренные» распределения (

- существующие на ограниченном интервале аргумента (
Т.к. в рассматриваемом случае для помехи измерения известен только класс распределения, но не его вид, то оценку
Исходя из вида уравнения (1), описывающего динамику стохастического вектора состояния х, искомую оценку

где 
В качестве исходной формы минимизируемого функционала, гарантирующего наилучшую точность оценивания в минимаксном смысле, предварительно рассмотрим классический функционал . Анализ всех известных видов его подынтегральной функции F показывает [Справочник по теории автоматического управления / Под ред. Красовского А.А. М.: Наука. Гл. ред. физ. -мат. лит. 1987. 712 с.; Huber P.J., Ronchetti E.M. Robust statistics. New Jersey: John Wiley Sons, 2009. 371 с.], что данная функция является неотрицательно определенной для всей области определения аргумента. Это обстоятельство позволяет перейти от минимизации данного функционала к минимизации функции
. Анализ всех известных видов его подынтегральной функции F показывает [Справочник по теории автоматического управления / Под ред. Красовского А.А. М.: Наука. Гл. ред. физ. -мат. лит. 1987. 712 с.; Huber P.J., Ronchetti E.M. Robust statistics. New Jersey: John Wiley Sons, 2009. 371 с.], что данная функция является неотрицательно определенной для всей области определения аргумента. Это обстоятельство позволяет перейти от минимизации данного функционала к минимизации функции

Для последующего определения искомой функции 

С учетом уравнения оценки (3) данное условие трансформируется к виду:

Вводя, следуя [Справочник по теории автоматического управления / Под ред. Красовского А.А. М.: Наука. Гл. ред. физ. -мат. лит. 1987. 712 с.], обозначение 


позволяющее сразу определить искомую вектор-функцию

С учетом (5) уравнение робастной оценки (3) окончательно принимает вид:

При этом, выбор начальных условий оценивания, следуя описанному минимаксному подходу, целесообразно осуществлять из условия минимизации функции F0, соответствующей наиболее неблагоприятному предположению о распределении начальных условий вектора состояния х, т.е. из условия 
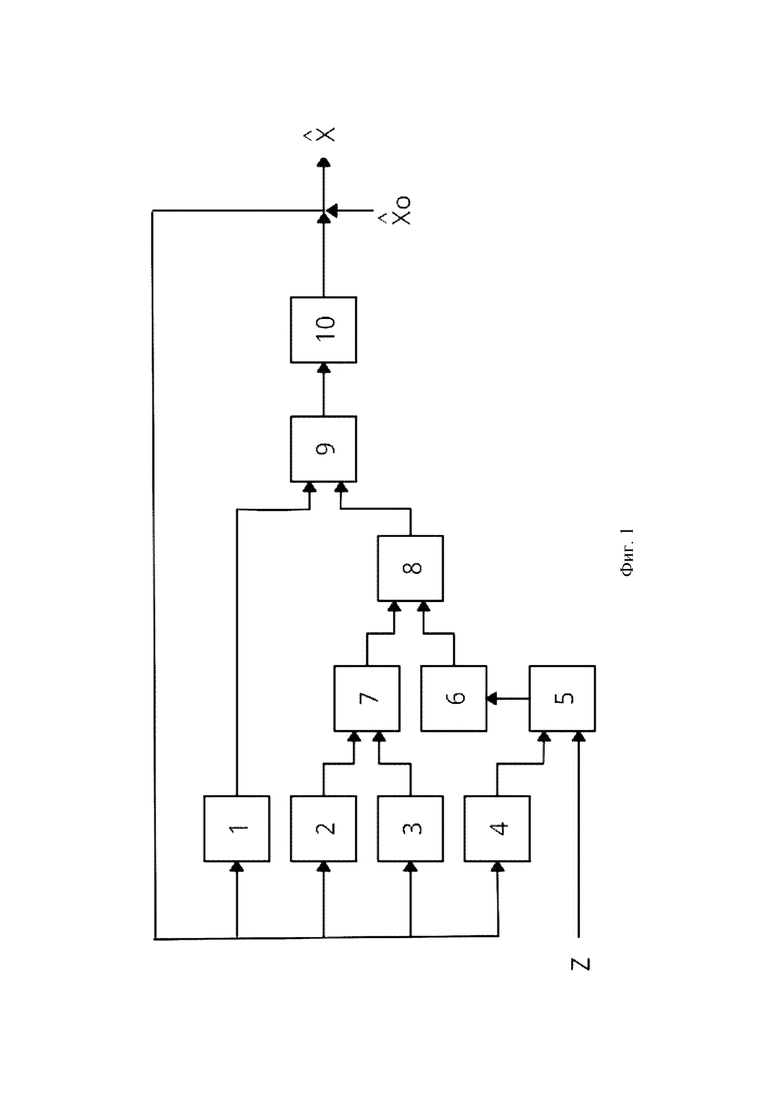
Функциональная схема робастного стохастического фильтра (далее - устройства) приведена на фиг.1.
Устройство содержит:
- первый блок 1 векторного функционального преобразования 
- первый блок 2 матричного функционального преобразования 
- второй блок 3 матричного функционального преобразования 
- второй блок 4 векторного функционального преобразования 
- блок 5 вычитания векторов размерности К,
- третий блок 6 векторного функционального преобразования 
- блок 7 умножения матрицы размерности N*N на матрицу размерности N* К,
- блок 8 умножения матрицы размерности N* К на вектор размерности К,
- блок 9 суммирования векторов размерности N,
- блок 10 интегрирования вектора размерности N.
Входом устройства является вход уменьшаемого блока вычитания векторов 5. Вход вычитаемого блока вычитания векторов 5 соединен с выходом второго блока векторного функционального преобразования 4, а выход подключен к входу третьего блока векторного функционального преобразования 6. Выход третьего блока векторного функционального преобразования 6 подключен к К-размерному входу блока умножения матрицы на вектор 8, N*К- размерный вход которого соединен с выходом блока умножения матрицы на матрицу 7. N*N - размерный вход блока умножения матрицы на матрицу 7 соединен с выходом первого блока матричного функционального преобразования 2, а его N* К - размерный вход соединен с выходом второго блока матричного функционального преобразования 3. Выход блока умножения матрицы на вектор 8 подключен к первому входу блока суммирования векторов 9, второй вход которого соединен с выходом первого блока векторного функционального преобразования 1, а выход подключен к входу блока интегрирования вектора 10. Выход блока интегрирования вектора 10 подключен к входам первого 1 и второго 4 блоков векторного функционального преобразования, первого 2 и второго 3 блоков матричного функционального преобразования, а также является выходом устройства.
Устройство работает следующим образом.
В начальный момент времени с выхода блока интегрирования вектора 10 вводится начальное значение вектора оценки







Предложенный робастный стохастический фильтр повышает быстродействие процесса оценивания, обеспечивая формирование оценки наблюдаемого вектора состояния в реальном времени, точность фильтрации за счет устойчивости к неопределенным возмущениям вектора состояния и помехам измерения, а также обеспечивает сокращение вычислительных затрат за счет простой конструктивной реализации фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робастный дискретный стохастический фильтр | 2023 |
|
RU2804256C1 |
| РОБАСТНЫЙ ДИСКРЕТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2830681C1 |
| РОБАСТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2826922C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| Способ позиционирования подвижного транспортного объекта | 2023 |
|
RU2811665C1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265855C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ | 2022 |
|
RU2801897C1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1995 |
|
RU2100905C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
Изобретение относится к области информационно-измерительных систем и может быть использовано для робастной фильтрации стохастических сигналов и параметров состояния стохастических систем в условиях неопределенности вероятностных характеристик помех измерения. Технический результат заключается в повышении быстродействия и точности робастной фильтрации динамических процессов, а также сокращении вычислительных затрат за счет реализации робастного фильтра измеряемого сигнала в дифференциальной форме. Согласно изобретению фильтр содержит первый блок 1 векторного функционального преобразования размерности N, первый блок 2 матричного функционального преобразования размерности N*N, второй блок 3 матричного функционального преобразования размерности N*К, второй блок 4 векторного функционального преобразования размерности К, блок 5 вычитания векторов размерности К, третий блок 6 векторного функционального преобразования размерности К, блок 7 умножения матрицы размерности N*N на матрицу размерности N* К, блок 8 умножения матрицы размерности N* К на вектор размерности К, блок 9 суммирования векторов размерности N, блок 10 интегрирования вектора размерности N. 1 ил.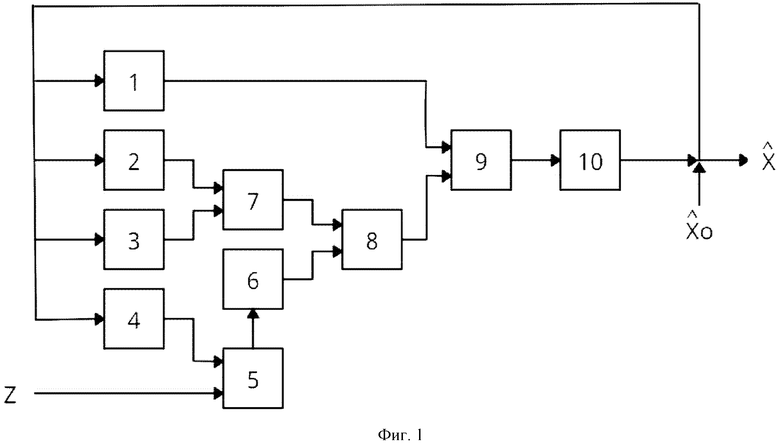
Робастный стохастический фильтр, отличающийся тем, что в него введены три блока векторного функционального преобразования, два блока матричного функционального преобразования, блок вычитания векторов, блок умножения матриц, блок умножения матрицы на вектор, блок суммирования векторов и блок интегрирования вектора, входом устройства является вход уменьшаемого блока вычитания векторов, вход вычитаемого которого соединен с выходом второго блока векторного функционального преобразования, а выход подключен к входу третьего блока векторного функционального преобразования, выход которого подключен к К-размерному входу блока умножения матрицы на вектор, N*К-размерный вход которого соединен с выходом блока умножения матрицы на матрицу, N*N - размерный вход которого соединен с выходом первого блока матричного функционального преобразования, а N*К-размерный вход соединен с выходом второго блока матричного функционального преобразования, выход блока умножения матрицы на вектор подключен к первому входу блока суммирования векторов, второй вход которого соединен с выходом первого блока векторного функционального преобразования, а выход подключен к входу блока интегрирования вектора, выход которого подключен к входам первого и второго блоков векторного функционального преобразования, первого и второго блоков матричного функционального преобразования, а также является выходом устройства.
| Регуляризованный фильтр Калмана | 1989 |
|
SU1651355A1 |
| RU 2169496 C2, 10.12.2000 | |||
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2050581C1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2084014C1 |
| Стохастический фильтр | 1989 |
|
SU1675905A1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2065620C1 |
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2050590C1 |
| АДАПТИВНЫЙ ФИЛЬТР ДЛЯ ОЦЕНИВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ | 1993 |
|
RU2110883C1 |
| US 4760596 A1, 26.07.1988 | |||
| US 5051751 A1, 24.09.1991. | |||

