Изобретение относится к радиотехнике и может быть использовано в радионавигационных и связных системах для определения на каждом объекте относительного местоположения остальных объектов.
Известен способ [1] измерения дальности между запросчиком и несколькими ответчиками. Способ основан на формировании в запросчике последовательности сигналов с периодом T, большим удвоенного времени, соответствующего максимальной измеряемой дальности, излучении запросчиком запросных сигналов, приеме этих сигналов ответчиком, излучении ответных сигналов, сформированных из принятых запросных, приеме запросчиком ответных сигналов, измерении дальности в опросчике по интервалу между запросным и соответствующим ему ответным сигналами, причем первый запросный сигнал формируют из последовательности сигналов с периодом T, последующие запросные сигналы формируют из принятого запросчиком ответного сигнала на предыдущий запрос, а при непоступлении этого ответного сигнала из соответствующего этому ответному сигналу запросного, задержанного на время T, определяют в ответчике дальность по интервалу между двумя последовательно принятыми запросными сигналами.
Однако этот известный способ при измерении дальности между многими объектами не обеспечивает измерение на каждом объекте дальностей до всех остальных объектов.
Наиболее близким к предложенному является способ [2], реализованный в устройстве - системе определения местоположения движущихся объектов с помощью искусственных спутников Земли. Способ основан на излучении на все подвижные объекты с наземного пункта запросного кодированного сигнала, общего для всех подвижных объектов, приеме его всеми подвижными объектами, излучении каждым подвижным объектом своего собственного закодированного индивидуальным кодом сигнала, приеме этого сигнала наземным пунктом и тремя спутниками Земли, расположенными в различных точках орбиты, переизлучении кодированных сигналов каждым спутником и приеме их наземным пунктом, на котором измеряется задержка распространения сигнала от момента приема наземным пунктом кодированного сигнала от подвижных объектов до момента приема кодированных сигналов переизлученных спутниками, по измеренным задержкам вычисляются местоположения подвижных объектов.
Вычисление дальности между подвижным объектом и спутником, необходимой для определения местоположения, производится по формуле
где
DSO - дальность между спутником и подвижным объектом;
DSZ - дальность между спутником и Землей;
DOZ - дальность между подвижным объектом и Землей;
α - угол между направлениями из наземного пункта на спутник и на подвижный объект.
Дальность между спутником и Землей известна из параметров орбиты спутника, дальность между подвижным объектом и Землей вычисляется через время распространения между запросным сигналом с наземного пункта и ответным сигналом, принятым от подвижного объекта наземным пунктом, угол между направлениями из наземного пункта на спутник и на подвижный объект измеряется антенной системой наземного пункта.
Анализ приведенной формулы показывает, что т.к. в формуле вычисления дальности присутствует угол, то, следовательно, точность вычисления дальности зависит от точности измерения угла.
Этот способ не позволяет обеспечить независимость точностных характеристик измерения дальностей от точностных характеристик измерения углов.
Целью изобретения является повышение точности измерения местоположений подвижных объектов за счет независимости между точностями измерения дальностей и точностями измерения углов.
Поставленная цель достигается тем, что по способу определения относительного местоположения n объектов, заключающемуся в одновременном измерении времени распространения запросно-ответных сигналов между объектами и измерении направления прихода указанных сигналов, а также в формировании запросных сигналов в момент приема ответных сигналов на i-м объекте, причем адресу (i+1)-го объекта присваивают признаки передачи этому объекту инициативы формирования следующего запроса-ответа сигнала, при этом следующим после n-го является 1-й объект, а при поступлении на i-й объект запросно-ответного и ответных сигналов на нем измеряют направление прихода всех сигналов, задержку между собственным дальномерным кодом и принимаемым в данный момент дальномерным кодом, от другого объекта группы после измерения осуществляют синхронизацию собственного дальномерного кода под принятый дальномерный код, а также из общего информационного потока выделяют числовые значения аналогичных задержек, измеренных и вычисленных на других объектах, по задержкам, измеренным на данном объекте и принятым от других объектов, вычисляют дальности до других объектов группы по формуле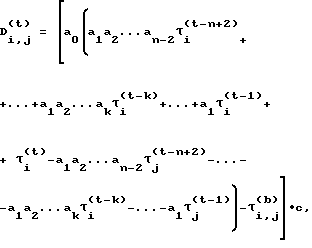
где - номер обмена в группе, причем to = 0 соответствует началу информационного обмена в группе:
- номер обмена в группе, причем to = 0 соответствует началу информационного обмена в группе:
i - номер объекта, на котором вычисляется задержка распространения и соответственно дальность;
j - номер объекта, который в t-й интервал обмена находится в передаче, причем j удовлетворяет одновременно следующим условиям:  и
и  ;
;
k - коэффициент, удовлетворяющий условию (n-2)>k>1, k - целое число, n - число объектов в группе;
c - скорость распространения сигнала;
D
τ
τ
a0, a1, ..., an-2 - коэффициенты, определяемые выражением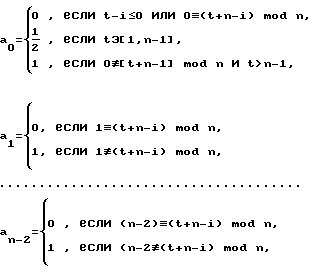
b - номер интервала обмена, удовлетворяющий одновременно условиям t>b<$E>=>t-n+1 и i≡b(mod n);
τ
измеренные и вычисленные задержки сообщают в результате информационного обмена другим объектом группы.
Заявляемый способ отличается от прототипа введением информационного обмена между объектами группы, измеренными задержками между собственным дальномерным кодом и принятым от другого объекта дальномерным кодом, а также обменом, вычисленными на каждом объекте задержками распространения зондирующих сигналов до других объектов; синхронизацией собственного дальномерного кода (ДК) под принимаемый ДК в каждом интервале обмена; изменением формулы, с помощью которой на каждом объекте вычисляется удаление до других объектов.
Анализ перечисленных выше отличительных признаков показывает, что для решения поставленной задачи - выполнения своего назначения и создания положительного эффекта их совокупность не требует добавления других признаков, т. е. является достаточной, т.к. наличие этих признаков позволяет избавиться от присутствия угла α
Следовательно, все эти признаки являются существенными, а их совокупность характеризует завершенное техническое решение.
Введенные признаки доказывают отличия от прототипа, а следовательно, и критерий изобретения "новизна".
Исследование роли указанных выше отличий в динамике показывает, что исключение любого из признаков делает невозможным получение положительного эффекта при использовании заявляемого способа. Это свидетельствует о существовании непосредственной причинно-следственной связи между этими отличиями и положительным эффектом, указанным в цели изобретения.
Все эти отличия являются абсолютными, например информационный обмен между объектами синхронизации для принимаемого сигнала известны сами по себе.
Однако в известных решениях они не направлены на повышение точности измерения удалений между объектами, т.е. на создание такого же положительного эффекта. Следовательно, указанные выше отличительные признаки являются существенными и удовлетворяют критерию "существенные отличия".
На фиг. 1 представлено произвольное размещение объектов в группе, состоящей из четырех объектов, где Di,j - взаимное удаление объектов, τi,j - взаимные задержки распространения сигналов, c - скорость распространения сигналов.
На фиг. 2, 3 и 4 показаны временные диаграммы последовательных запросов и ответов в группе, содержащей четыре объекта, причем на фиг. 2 представлен переходный процесс, начинающийся при t0=0, т.е. в нулевой интервал обмена, и заканчивающийся при t3=3 в третий интервал обмена; на фиг. 3 и 4 представлен установившийся обмен в группе, в верхней строке над диаграммами обозначены номера интервалов обмена t0=0...t9=9.
Под каждым периодом обмена на каждом объекте выписаны выражения, при помощи которых на этом объекте вычисляется задержка распространения сигнала до объекта, находящегося в данный момент в передаче. Внутри диаграмм символом  обозначен тот факт, что данный объект находится в режиме "передача", а символ
обозначен тот факт, что данный объект находится в режиме "передача", а символ  - в режиме "прием". Внутри каждой диаграммы записаны величины ее абсолютной задержки без учета времени τобр, которое известно на каждом объекте и одинаково. Временная диаграмма, расположенная сверху, характеризует временное положение опорного ДК для каждого объекта, а снизу - принимаемого ДК.
- в режиме "прием". Внутри каждой диаграммы записаны величины ее абсолютной задержки без учета времени τобр, которое известно на каждом объекте и одинаково. Временная диаграмма, расположенная сверху, характеризует временное положение опорного ДК для каждого объекта, а снизу - принимаемого ДК.
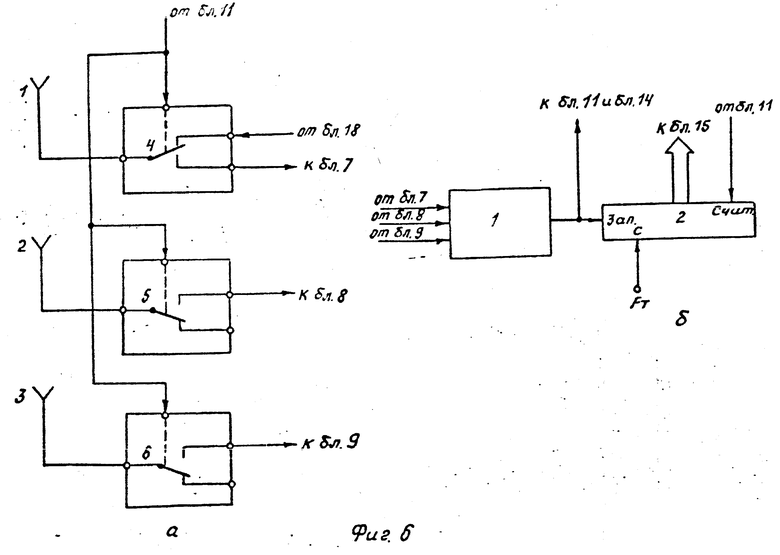
На фиг. 5 изображена блок-схема устройства, реализующего данный способ.
На фиг. 6 a - представлена функциональная схема антенных коммутаторов 4, 5, 6; на фиг. 6б - функциональная схема блока 19.
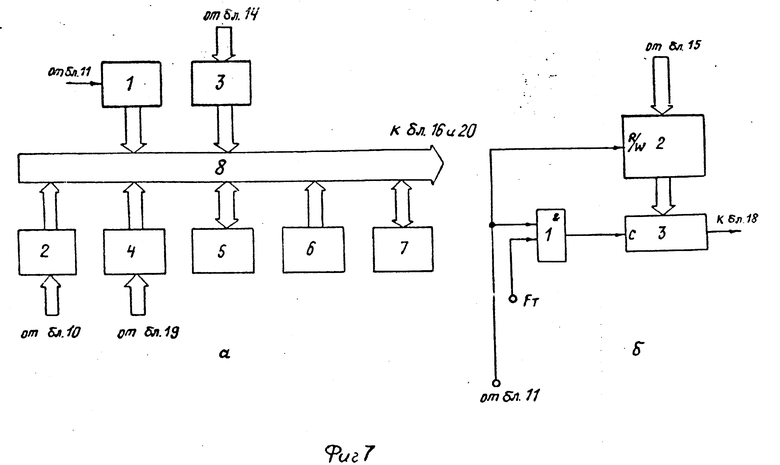
На фиг. 7а показана функциональная схема блока 15; на фиг. 7б - функциональная схема блока 20.
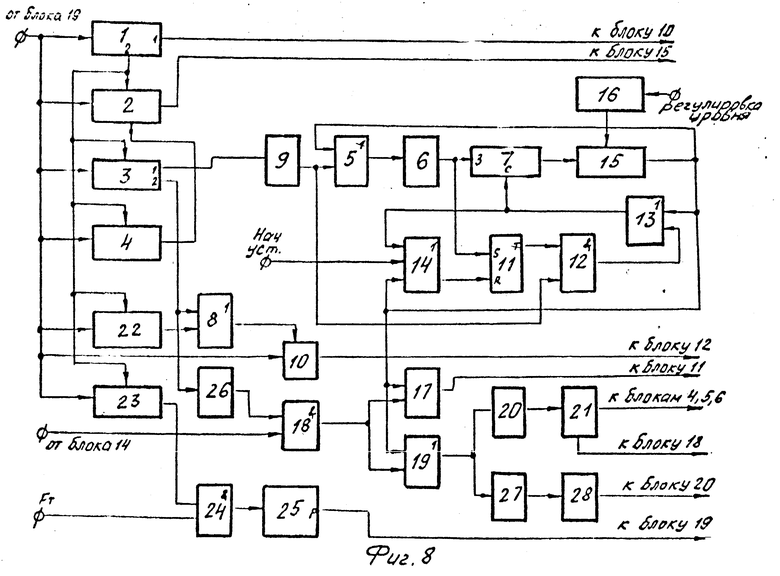
На фиг. 8 дана функциональная схема блока 11.
Система единого тактирования всех устройств, обеспечивающая их синхронную работу, условно не показана с целью не загромождения схемы.
Рассмотрим последовательный процесс измерения задержек распространения сигнала в группе, состоящей из четырех объектов.
В момент времени t0=0, т.е. в нулевой интервал информационного обмена в группе, объект 0 передает дальномерный код (ДК) и информацию остальным объектам группы. Остальные объекты группы осуществляют синхронизацию своих дальномерных кодов, в качестве которых могут, в частности, использоваться псевдослучайные последовательности с хорошими автокорреляционными свойствами, например M - последовательности, под принимаемый дальномерный код от объекта 0. При этом ДК, сформированный на 1-м объекте в результате синхронизации под ДК нулевого объекта окажется задержанным на время распространения сигнала между объектом 0 и объектом 1 τ
В нулевой интервал (t0=0) обмена в группе на объектах 0, 1, 2 и 3 невозможно измерить величины τ
t1-t0=τобр=τпр.м+τпр.р..., (1)
где
τобр - время обработки на каждом объекте;
τпр.м - время приема на каждом объекте;
τпр.р - принятия решения на каждом объекте.
Время τобр выбирают строго фиксированным и равным для всех объектов. На объектах 0,2 и 3 измеряют задержки между ранее сформированными периодически продолженными ДК и принимаемым ДК от объекта 1, причем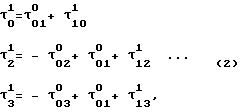
где
τ
После измерения задержек на объектах осуществляется синхронизация собственного ДК под принимаемый ДК.
Если считать, что τ
В момент времени t2=2, т.е. во второй интервал обмена, объект 2 передает ДК и информацию остальным объектам. В информационной части обмена он сообщает остальным объектам измеренную задержку τ
На объектах 0, 1, 3 измеряют задержки
На объекте 0 вычисляют задержку распространения τ
где
τ
Если выполняется условие τ
Также можно вычислить задержку распространения из выражения
t
Принимают равными, что является естественным, т.к. задержка распространения не зависит от позиций индексов, τ
В момент времени t3=3, т.е. 3-й интервал обмена, объект 3 передает ДК и информацию остальным объектам.
В информационной части обмена он сообщает остальным объектам измеренные задержки τ
На объектах 0,1 и 2 измеряют задержки
После измерения задержек на объектах осуществляется синхронизация собственного ДК под принимаемый ДК.
На объекте 0 вычисляют задержку распространения τ
Если выполняется условие τ
Также можно вычислить задержку распространения из выражения
τ
считая, что τ
На объекте 1 вычисляют задержку распространения τ
Если выполняется условие τ
Также можно вычислить τ
τ
считая, что τ
На объекте 2 вычисляют задержку распространения
считая, что τ
В момент времени t=4, т.е. в 4-й интервал обмена, объект 0 вновь передает остальным объектам ДК и информацию. В информационной части обмена он сообщает остальным объектам измерения задержки τ
На объектах 1, 2 и 3 измеряют задержки
После измерения задержек на объектах осуществляется синхронизация собственного ДК под принимаемый ДК.
На объекте 1 вычисляют задержку распространения
Считая, что τ
На объекте 2 вычисляют задержку распространения
Считая, что τ
На объекте 3 вычисляют задержку распространения τ
считая, что τ
Анализируя вышеизложенное, можно заметить, что в результате измерений задержек на каждом объекте, информационного обмена измеренными задержками и результатами вычислений между объектами в момент времени t4=4, т.е. в 4-й интервал обмена, на каждом объекте будет определено его удаление от других объектов, в частности
на объекте 0 определены τ
на объекте 1 определены τ
на объекте 2 определены τ
на объекте 3 определены τ
Следовательно, начиная с 4-го интервала обмена на каждом объекте может быть определено относительное местоположение остальных объектов группы, т.к. на каждом объекте известны удаления от него остальных объектов и измерены углы пеленга θ между осью антенной системы данного объекта и направлением на другой объект.
Анализируя вычислительные выражения, выведем общее правило вычисления задержки распространения сигналов между двумя объектами группы, состоящей из n объектов, которое заключается в следующем.
Для измерения задержки распространения сигнала между объектами a (пусть a=i=1) и b (пусть b=i=2) на объекте a (т.е. a=i=1) в текущий интервал обмена (пусть t=4) необходимо
просуммировать задержки между опорным ДК и принимаемым ДК, измеренные на объекте a (т.е. a=i=1), начиная с интервала обмена, следующего за интервалом выхода объекта a (т.е. a=i=1) в передачу, (т.е. с t=2) до текущего интервала обмена (т.е. до t=4), т.е. τ
вычесть из этой суммы задержки между опорным ДК и принимаемым ДК, измеренных на объекте c, который выходит в передачи в текущем интервале (т.е. c= i=0), начиная с интервала обмена, следующего за интервалом выхода объекта a (т. е. a=i=1) в передачу (т.е. t=2), до интервала, предшествующего интервалу выхода объекта c (т.е. c=i=0) в передачу (т.е. до t=3), т.е. вычесть τ
из результата вычесть задержку распространения, измеренную в интервале выхода в передачу объекта a (т.е. a=i=1) (т.е. t=1), на борту объекта c (т. е. c=i=0), т.е. вычесть τ
Правильность словесного описания можно проверить, обратясь к фиг. 2, 3, 4.
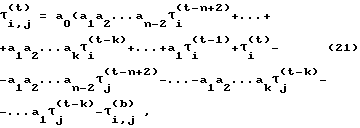
Словесное описание правила вычисления задержки распространения сигнала между двумя любыми объектами группы, состоящей из n объектов, можно формально представить в виде следующего выражения:
где
t ϶ [0,n-1] - номер интервала обмена в группе из n объектов, причем t=0 соответствует началу информационного обмена в группе;
i - номер объекта, на котором вычисляется задержка распространения;
j - номер объекта, который в t-й интервал обмена находится в передаче и до которого вычисляется задержка распространения, j удовлетворяет условиям j ϶ [0,n-1] и j ≡ t(mod n);
τ
τ
τ
k - коэффициент, удовлетворяющий условию (n-2)>k>1, k - целое число;
a0,a1...an-2 - коэффициенты, определяемые выражением
где
t ϶ [n,∞] - номер интервала информационного обмена в группе;
b - номер интервала информационного обмена в группе, удовлетворяющий условиям t>b≥t-n+1 и i ≡ b(mod n);
k - коэффициент, удовлетворяющий условию (n-2)>k>1, и k - целое число;
a0, a1,...ak...an-2 - коэффициенты, определяемые выражениями
τ
Для того, чтобы убедиться в правильности выражений (20) и (21), подставим в них конкретные значения. Например, выражение (20) вычислим для t=3, n=4, i=0.
Из фиг. 2 определяем, что при t=3, т.е. в 3-й интервал информационного обмена, в передаче находится 3-й объект и, следовательно, j=3, т.к. только число 3 удовлетворяет одновременно двум условиям 4≥3≥0 и остаток от деления 3 на 4 равен 3.
Определим коэффициенты a:
a0=1, т.к. 3-0>0,
a1=1, т.к. 3-0≠1,
a2=1, т.к. 3-0≠2.
Подставим все это в выражение (20), получим
Легко заметить, что выражение представляет собой алгебраическую сумму левых частей выражения (9), умноженную на 1/2, что совпадает с выражением (10). Значение τ
Выражение (21) вычислим, например, для t=4, n=4, i=2.
На фиг. 3 определим, что при t=4, т.е. в 4-м интервале информационного обмена в передаче находится 0-й объект, следовательно, j=0, т.к. только число 0 удовлетворяет одновременно двум условиям 3≥0≥0 и остаток от деления 4 на 4 равен 0.
Определим параметр b из условий
4>b≥4-4+1=1;
2 ≡ b(mod 4).
Одновременно этим условиям удовлетворяет только b=2, т.к. только 4>2≥1 и остаток от деления 2 на 4 равен 2.
Определим коэффициенты a:
a0=1, т.к. 0 ≢ (4+4-2)mod 4,
т.е. остаток от деления 6 на 4 не равен 0,
a1=1, т.к. 1 ≢ (4+4-2)mod 4,
т.е. остаток от деления 6 на 4 не равен 1,
a2=0, т.к. 2 ≡ (4+4-2)mod 4,
т.е. остаток от деления 6 на 4 равен 2.
Подставляя все это в выражение (21), получим
τ
Это выражение совпадает с алгебраической суммой левых частей выражения (18) и с алгебраической суммой левых частей выражения на фиг. 3 для 2-го объекта в 4-й интервал обмена.
Выражение (21) вычислим еще раз, например, для t=9, n=4, i=3.
Из фиг. 4 определим, что при t=9, т.е. в 9-м интервале информационного обмена, в передаче находится 1-й объект, следовательно, j=1, т.е. только число 1 удовлетворяет одновременно двум условиям 4≥1≥0 и остаток от деления 9 на 4 равен 1.
Определим параметр b из условий
9>b≥9-4+1=6;
3 ≡ b(mod 4)./
Этим условиям удовлетворяет только b=7, т.к. только 9>7≥6 и остаток от деления 7 на 4 равен 3.
Определим коэффициенты a:
a0=1, т.к. 0 ≢ (9+4-3)mod 4,
т.е. остаток от деления 10 на 4 не равен 0,
a1=1, т.к. 1 ≢ (9+4-3)mod 4,
т.е. остаток от деления 10 на 4 не равен 1,
a2=0, т.к. 2 ≡ (9+4-3)mod 4,
т.е. остаток от деления 10 на 4 равен 2.
Подставляя все это в выражение (21), получим
τ
Обращаясь к фиг. 4, видим, что это выражение совпадает с алгебраической суммой левых частей выражения, записанного для 3-го объекта в 9-й интервал информационного обмена.
Умножая выражения (20) и (21) на c - скорость распространения сигнала, получим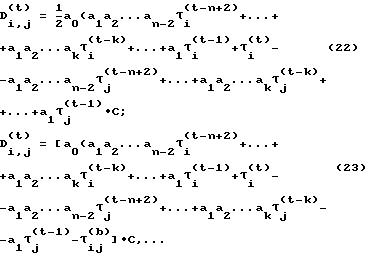
выражения для вычисления удаления между объектами в группе.
Выражение (22) можно заменить выражением (23), если положить, что τ
Параметр b - это номер интервала обмена, в котором измеряется τi,j , а потому с физической точки зрения ясно, что при b < 0 τi,j = 0 , т.к. процесс измерения τi,j начался с интервала обмена t0 = 0 и при t < 0 физически не существовал.
Для объединения выражений (22) и (23) коэффициент a0 необходимо вычислять по формуле
Тогда выражение для вычисления расстояний между объектами примет вид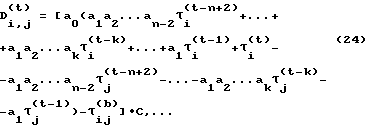
где
t ϶ [n,∞] - номер обмена в группе, причем t0 = 0 соответствует началу информационного обмена в группе;
i - номер объекта, на котором вычисляются задержка распространения и соответственно дальность;
j - номер объекта, который в t-й интервал обмена находится в передаче, причем j удовлетворяет одновременно следующим условиям:
j ϶ [0,n-1] и j ≡ t(mod n);
k - коэффициент, удовлетворяющий условию (n - 2) > k > 1, k - целое число, n - число объектов в группе;
c - скорость распространения сигнала;
D
τ
τ
a0, a1...an-2 - коэффициенты, определяемые выражением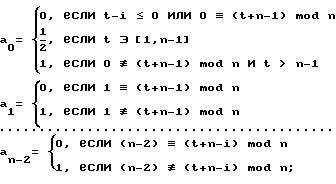
b - номер интервала обмена, удовлетворяющий одновременно условиям
t > b ≥ t - n + 1 и i ≡ b(mod n);
τ
Докажем справедливость выражения (24) методом математической индукции, который описан в Справочнике по математике авторов А.А. Рывкин, А.З. Рывкин, Л.С. Хренов. М.: Высшая школа, 1975, с. 145.
а) Убедимся в справедливости выражения (24) при t = t1 = 1, n = 4 и i = 0, т. е. в 1-й интервал обмена, когда в передаче находится 1-й объект (см. фиг. 2) и, следовательно, j = 1, т.к. только число 1 удовлетворяет одновременно двум условиям:
j ϶ [0,n-1] и j ≡ t(mod n),
3 > 1 > 0 и 1 ≡ 1(mod 4),
т.е. остаток от деления 1 на 4 равен 1.
Определим коэффициенты a:
a0 = 1/2, т.к. 3 > (t = 1) ≥ 1;
a1 = 0, т.к. 1 ≡ (1+4-0) mod n ,
т.е. остаток от деления 5 на 4 равен 1,
a2 = 1, т.к. 2 ≢ (1+4-0) mod 4,
т.е. остаток от деления 5 на 4 не равен 2.
Определим параметр b из условий
i = b (mod m) и t > b ≥ t - n - 1,
0 ≡ -4(mod 4) , 1 > - 4 ≥ 1 - 4 - 1 = 4,
только b = -4 удовлетворяет обоим этим условиям.
Подставим вычисленные значения в выражение (24):
Нетрудно убедиться, что полученный результат совпадает с выражением (3), а значение τ
б) Предположим, что выражение (1) верно при всех t, для которых 1 ≤ t ≤ 7.
в) Докажем, что выражение (1) верно при t = 7 + 1 = 8, n = 4, i = 2.
В 8-м интервале обмена в передаче находится 0-й объект, поэтому j=0, т. к. только число 0 удовлетворяет одновременно двум условиям:
j ϶ [0,n-1] и j ≡ t(mod n),
3 > 0 ≥ 0 и 0 ≡ 8 (mod 4),
т.е. остаток от деления 8 на 4 равен 0.
Определим коэффициенты a:
a0 = 1, т.к. 0 ≢ (8+4-2) mod 4,
т.е. остаток от деления 10 на 4 не равен 0,
a1 = 1, т.к. 1 ≡ (8+4-2) mod 4,
т.е. остаток от деления 10 на 4 не равен 1,
a2 = 0, т.к. 2 ≡ (8+4-2) mod 4,
т.е. остаток от деления 10 на 4 равен 2.
Определим параметр b из условий
i ≡ b(mod n) и t > b ≥ t - n - 1,
2 ≡ 6(mod 4) , 8 > 6 > 8 - 4 - 1 = 5,
т.е. остаток от деления 6 на 4 равен 2, b = 6.
Подставим вычисленные значения в выражение (24):
Легко убедиться, что полученный результат совпадает с алгебраической суммой левых частей выражения, записанного на фиг. 2 или 2-го объекта в 8-й интервал обмена.
В приведенной цепочке доказательств при переходе от a к b использовано предположение индукции δ а т.к. условия a и b выполнены, то в силу аксиомы индукции следует, что выражение (24) верно при всех натуральных t.
Устройство, реализующее данный способ, содержит три разнесенные на объекте антенны 1, 2, 3, три антенных коммутатора 4, 5, 6, три приемных устройства 7, 8, 9, блок измерения разности задержек 10, дешифратор управляющего слова 1, синхронизатор 12, генератор псевдослучайной последовательности (ПСП) 13, блок измерения временных задержек 14, вычислитель дальности и относительного угла 15, индикатор местоположения 16, шифратор управляющего слова 17, передающее устройство 18, блок обработки информации 19, блок формирования информационного блока 20.
Разнесенные антенны 1, 2, 3 через антенные коммутаторы 4, 5, 6 подключены к приемным устройствам 7, 8, 9, выходы которых подключены к блоку измерения разности задержек 10, вход которого подключен к вычислителю 15. Выходы приемных устройств 7, 8 и 9 подключены к блоку обработки информации 19. Последовательный выход блока 19 подключен к входу дешифратора 11 и блоку измерения задержки 14, управляющий выход которого подключен к генератору ПСП 13, синхронизатору 12 и дешифратору 11. Параллельный выход блока 19 подключен к вычислителю 15. Один из выходов дешифратора 11 подключен через синхронизатор 12 к генератору ПСП 13, один из выходов которого через блок измерения временных задержек 14 подключен к вычислителю 15, выходы которого подключены к индикатору местоположения 16. Второй выход генератора ПСП 13 подключен к передающему устройству 18. Второй выход дешифратора 11 через шифратор управляющего слова 17 подключен к передающему устройству 18. Третий выход дешифратора 11 подключен к управляющему входу передающего устройства 18 и управляющим входам антенных коммутаторов 4,5,6, четвертый выход дешифратора 11 - к управляющему входу блока 10, пятый - к вычислителю 15, шестой - к блоку 19, а седьмой - к блоку 20. Параллельный выход блока 15 подключен к входу блока 20, а выход блока 20 - к третьему информационному входу передатчика 18.
Устройство, реализующее данный способ, работает следующим образом.
В режиме приема сигнал, принятый тремя разнесенными на объекте антеннами 1, 2, 3, через соответствующие антенные коммутаторы 4, 5, 6 поступает на входы приемных устройств 7, 8, 9, которые производят преобразование частоты принимаемого сигнала, его демодуляцию и декодирование. С выходов трех приемных устройств три задержанные относительно друг друга ПСП поступают на блок измерения разности задержек 10, который осуществляет измерение временной задержки между ПСП с выходов приемников 7 и 9 по команде от дешифратора 11, выдаваемой в случае совпадения принятого адреса с адресами, хранящимися в дешифраторе 11. Задержка между этими ПСП пропорциональна косинусу угла между осью антенной системы и направлением на источник излучения. Сигнал с выхода приемника 8 используется в блоке 10 для устранения неоднозначности местоположения источника сигнала. Сигнал с выхода блока 10 поступает в вычислитель 15, где вычисляется угол между осью антенной системы и направлением на источник по формуле
где
Δτ - измеренная блоком 10 разность задержек ПСП от приемников 7 и 9;
c - скорость распространения сигнала;
d - расстояние между 1-ой и 3-й антеннами.
Вычислитель 15 также осуществляет вычисление угла αi,j между направлением из данного объекта на два других объекта, от которых пришли следующие друг за другом ответы. Этот угол вычисляют как модуль разности между двумя последовательно вычисленными углами θ , т.е.

где
θk - угол между осью антенной системы i-го объекта и направлением на k-й объект, т.е. на объект, ответ от которого предшествовал ответу от j-го объекта;
θj - угол между осью антенной системы i-го объекта и направлением на j-й объект;
αi,j - угол между направлениями из i-го объекта на k-й и j-й объекты.
Неоднозначность расположения источников излучения относительно оси антенной системы устраняется сигналом от антенны 2, которая установлена вне оси, соединяющей антенны 1 и 3. Определяя, запаздывает или опережает сигнал с выхода приемника 8 сигналы с выходов приемника 7 и 9, можно установить, по какую сторону от оси антенной системы находится источник излучения и присвоить измеренному углу знаки "+" или "-" соответственно. Влияние знака θ на угол αi,j устраняется взятием модуля разности углов θ.
В вычислителе 15 также осуществляется взятие косинуса угла αi,j . Сигналы с выходов трех приемных устройств 7, 8 и 9 отступают в блок обработки информации 19, где мажоритарно взвешиваются по принципу 2 из 3-х и далее поступают на дешифратор управляющего слова 11 и блок измерения задержек 14. Если принятое слово управления содержит информацию о том, что принятый сигнал является ответом, то дешифратор 11 выдает синхронизатору 12 команду на подстройку синхронизации под принимаемый сигнал. Пока в синхронизаторе 12 происходит процесс подстройки, генератор ПСП 13 продолжает работать на предыдущей синхронизации. Этим обеспечивается измерение в блоке 14 задержки между собственным опорным ДК, который был синхронизирован под предыдущий ответ, и принимаемым в данный момент времени ДК.
После окончания процесса измерения задержки в блоке 14 он выдает синхронизатору 12 команду на изменение синхронизации генератора ПСП 13.
Если принятое слово управления содержит информацию о том, что принятый сигнал является запросом, то дешифратор 11 запускает внутри себя таймер, формирующий задержку, равную
и выдает синхронизатору 12 команду на подстройку синхронизации под принимаемый сигнал. Пока в синхронизаторе 12 происходит процесс подстройки, генератор ПСП 13 продолжает работать на предыдущей синхронизации. Этим обеспечивается измерение выдержки в блоке 14.
После окончания процесса измерения задержки в блоке 14 он выдает синхронизатору 12 команду на изменение синхронизации генератора ПСП 13, дешифратору 11 на подготовку к переходу в режим передачи запроса, а генератору ПСП 13 на выдачу ПСП на вход передающего устройства 18. Дешифратор 11 при приеме признака запроса в управляющем слове выдает также команду шифратору 17 на формирование управляющего слова для запроса следующего объекта и ответа всем остальным объектам группы. Сигнал с выхода шифратора 17 поступает в передающее устройство 18, где из ПСП от генератора 13 управляющего слова от шифратора 17 и информационного блока от блока 20 формируется сообщение, которое затем кодируется, модулирует несущую и через антенный коммутатор 4 и антенну 1 излучается в пространство. Сигнал с третьего выхода дешифратора 11 обеспечивает перевод передающего устройства 18 в режим передачи и переключение антенного коммутатора 4 с входа приемника 7 на выход передатчика 18. Одновременно с этим антенные коммутаторы 5 и 6 отключают антенны 2 и 3 от входов приемников 8 и 9 для защиты их входных цепей от перегрузок в моменты излучения передатчика 18. Это необходимо, т.к. в условиях малого объекта разнос антенн 1, 2, 3 не может обеспечить необходимой развязки между ними.
По команде от дешифратора 11, выдаваемой в блок 18 после дешифрации в сообщении собственного адреса объекта и приема ДК, в блоке 19 осуществляется выделение из потока принимаемой информации блока внутригруппового информационного обмена, в котором данному объекту сообщаются задержки, измеренные и вычисленные на других объектах. Этот блок в цифровой форме передается в вычислитель 15. Числовые значения задержек, измеренных и вычисленных на других объектах, используются в вычислителе 15 для подставки их в выражение (24) и вычисления соответствующих дальностей до других объектов группы.
Величина временной задержки, измеренная блоком 14, в виде двоичного числа поступает в вычислитель 15, где по формулам вида (24) осуществляется вычисление удаленной от данного объекта до других объектов группы. Вычисленные блоком 15 удаления и относительные углы в цифровом виде поступают в индикаторы местоположения 16 и в блок 20 формирования информационного блока внутригруппового обмена, который по команде от дешифратора 11 передает его в последовательной форме в передатчик 18 для кодирования, модуляции и передачи другим объектам группы. В случае непринятия на объекте запроса-ответа с признаком передачи инициативы следующего запроса дешифратор 11 выдает команды на шифратор 17, передатчик 18, синхронизатор 12 с задержкой относительно своего предыдущего запроса-ответа
n(τmax+τобр), (32)
В слове управления, формируемом шифратором 17, выставляется признак, запрещающий объектам, принявшим такой запрос-ответ, вычислять дальность до объекта, инициатора такого запроса-ответа. На индикатор 16 в этом случае выводится дальность, вычисленная ранее.
Блоки 4, 5, 6 представляют собой антенные коммутаторы, управляемые от блока 11. Конструктивно эти блоки представляют собой управляемые ключи, а схематически могут быть выполнены либо на базе высокочастотных реле, либо на базе p-i-n диодных переключателей. Конструктивно блоки 4, 5 и 6 раскрыты на фиг. 6а.
Принцип их работы ясен из чертежа. Положение коммутаторов показано в режиме "передача".
Дешифратор управляющего слова 11, блок-схема которого изображена на фиг. 8, содержит дешифратор собственного адреса (ДСА) 1, дешифратор адресов других объектов (ДАО) 2, дешифратор признака передачи инициативы запроса (ДИЗ) 3, дешифратор признака запрета измерения дальности (ДЗИ) 4, элемент ИЛИ 5, элемент задержки (ЭЗ) 6, генератор пилообразного напряжения (ГП) 7, элемент ИЛИ 8, формирователь коротких импульсов (ФКИ) 9, управляемый ключ (УК) 10, RS-триггер 11, элемент И 12, элементы ИЛИ 13, 14, компаратор напряжения (КН) 15, регулируемый источник опорного напряжения (ИОН) 16, устройство формирования команд (УФК) 17, элемент И 18, элемент ИЛИ 19, элемент задержки (ЭЗ) 20, расширитель импульсов (РИ) 21, дешифратор признака (ДПО) 22, дешифратор информационного обмена (ДИО) 23, элемент И 24, счетчик слов информационного обмена (СИО) 25, расширители импульсов (РИ) 26 и 27 и элемент задержки (ЭЗ) 28.
Дешифратор управляющего слова работает следующим образом. Информация с выхода блока обработки 19 поступает на вход ДСА 1, который в случае содержания в информационном потоке адреса собственного объекта выдает на выход 1 сигнал, разрешающий блоку 10 измерение разности задержки дальномерного кода с выходов приемников 7, 8 и 9, а на выход 2 сигнал, разрешающий работу остальных дешифраторов, таким образом, определяется, что передаваемая информация адресована данному объекту, ДАО 2 реагирует на адреса отвечающих объектов и сообщает вычислителю дальности и относительно угла 15 о том, до какого объекта измеряются угол и дальность. ДИЗ срабатывает в том случае, если в управляющем слове содержится признак передачи инициативы запроса. При этом сигнал с выхода ДИЗ 3 через ФКИ 9, элемент ИЛИ 5 и ЭЗ 6 запускает генератор ПИЛЫ (ГП) 7, а через элемент ИЛИ 8 разрешает прохождение через УК 10 дальномерного кода в блок синхронизатора 12.
Необходимая задержка включения УК 10, соответствующая началу участка дальномерного кода в информационном потоке, и длительность включения УК 10, соответствующая длине дальномерного кода, обеспечиваются сигналом с выхода 2 ДИЗ 3. Одновременно с запуском ГП 7 устанавливается в "1" RS-триггер 11, разрешая прохождение следующих сигналов с выхода ДИЗ 3 через элемент И 12 и ИЛИ 13 на вход СБРОС ГП 7 и через элемент ИЛИ 14 на выход R RS-триггера 11. При этом в ГП 7 происходит быстрый разряд накапливающей емкости, а RS-триггер 11 устанавливается в "0". Через время, определяемое задержкой ЭЗ 6, ГП 7 вновь запускается, а RS-триггер 11 устанавливается в "1". ЭЗ 6 необходим для обеспечения завершения переходных процессов разряда накапливающей емкости в ГП 7, и время его задержки выбирается из условия
τЭЗ6 ≥ τДИЗ3,
где
τЭЗ6 - время задержки ЭЗ 6;
τДИЗ3 - длительность импульса на выходе ДИЗ 3.
Если импульсы с выхода ДИЗ 3 будут приходить через интервалы времени, определяемого выражением
T < n(τmax+τобр),
то напряжение на выходе ГП 7 не будет достигать уровня срабатывания компаратора 15, определяемого напряжением с выхода ИОН 16.
Если не будет принят признак передачи инициативы в течение времени
T ≥ n(τmax+τобр),
то напряжение на выходе ГП 7 за это время достигает уровня срабатывания компаратора 15, определяемого ИОН 16. При этом на выходе компаратора 15 появится импульс, который через элемент ИЛИ 14 установит в "0" RS-триггер 11, а также поступит через УФК 17 к шифратору 17 для введения в передаваемое данным объектом управляющее слово признака, запрещающего измерение дальности на других объектах для него.
Если такой признак будет принят на данном объекте, то срабатывает ДЗИ 4, сигнал с выхода которого запретит выдачу адреса объекта, от которого был получен данный признак, в вычислитель 15 для запрещения вычисления дальности до этого объекта.
По окончании измерения задержки в блоке 14, что определяет время обработки на объекте, т.е. τобр, в дешифратор 11 поступает импульс, который в случае приема признака передачи инициативы запроса проходит через элемент И 18 и УФК 17 для формирования команды шифратору 17 на формирование управляющего слова с признаком передачи инициативы запроса следующему объекту.
Разрешающий потенциал на элемент И 18 формируется через РИ 26 и имеет длительность, большую длительности разрешающего потенциала на его входе за время, необходимое для принятия решения в блоке измерения задержки 14. Сигналы с выходов компаратора 15 и элемента И 18 через элемент ИЛИ 19, ЭЗ 20 и РИ 21 поступают на антенные коммутаторы 4, 5, 6 для переключения антенны 1 к выходу передатчика 18 и отключения антенн 2 и 3 от входов приемников на время передачи, а также на передатчик 18 для включения излучения. Импульс с выхода ИЛИ 19 через РИ 27 и ЭЗ 28 поступает в блок 20. Задержка ЭЗ 28 поступает в блок 20. Задержка ЭЗ 28 обеспечивает начало выдачи блока информационного обмена из блока 20 в блок 18, а РИ 27 - необходимую длительность этой выдачи. ДИО 23 реагирует на начало блока информационного обмена в информационном потоке. Сигнал с его выхода разрешает прохождение тактовых импульсов на СИО 25, модуль счета которого соответствует разряду одного слова информационного обмена. Число переполнений СИО 25 будет равно числу слов в блоке информационного обмена. Длительность блока информационного обмена определяется длительностью разрешающего потенциала с выхода ДИО 23. Сигналы с выхода P СИО 25 поступают в блок 19 для организации параллельного вывода слов информационного обмена из блока 19 в блок 15.
Блок 15 представляет собой микроЭВМ, в памяти которой хранятся алгоритмы вычисления взаимных удалений и относительных углов пеленга. Функциональная схема блока 15 представлена на фиг. 7а. Она содержит блок последовательного ввода номера объекта, до которого измеряется дальность, т.е. инициатора передачи, блок 2 параллельного ввода числа, соответствующего измеренной разности задержек, блок 3 параллельного ввода числа, соответствующего измеренной задержке между собственным ДК и принятым ДК, блок 4 параллельного ввода результатов информационного внутригруппового обмена, блок 5 оперативного запоминающего устройства (ОЗУ), блок хранения переменных и промежуточных результатов вычислений, блок 6 постоянного запоминающего устройства (ПЗУ) для хранения констант и программ вычисления, блок 7 микропроцессора и системную Q-шину 8, объединяющую все эти блоки в единую микроЭВМ. Принцип работы микроЭВМ ничем не отличается от работы аналогичных ей универсальных микроЭВМ.
Функциональная схема блока 19 изображена на фиг. 6б. Она состоит из блока 1 мажоритарной обработки и регистра 2, преобразующего последовательно передаваемую информацию внутригруппового обмена в параллельную форму по командам от блока 11. Запись слова информационного внутригруппового обмена синхронизируется тактовой частотой Fт, получаемой из системы единого тактирования, условно не показанной с целью не загромождения схемы.
Функциональная схема блока 20 представлена на фиг. 7б и содержит элемент И 1 оперативное запоминающее устройство (ОЗУ) 2 магазинного типа и сдвиговый регистр 3.
Устройство работает следующим образом.
От блока 15 в режиме "прием" в ОЗУ 2 записываются вычисленные значения задержек непосредственно из Q-шины микроЭВМ. В режиме "передача" записанная ранее информация считывается пословно в регистр 3 и под действием тактовых импульсов выдвигается из него последовательно в блок 18.
Использование изобретения позволит повысить точность определения относительного местоположения n объектов за счет повышения точности измерения относительных удалений объектов путем обеспечения независимости результатов вычисления удалений от точности измерения углов относительного пеленга и самих углов.
Источники информации
1. С.И.Бычков, Г.А.Похолков, В.И.Яковлев. Радиотехнические системы предупреждения столкновений самолетов. М.: Сов. радио, 1977, с. 76.
2. US, патент N 4359733, кл. G 01 S 13/78, опубл. 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ В ПОЛНОСВЯЗНОЙ РАДИОСЕТИ | 2016 |
|
RU2634305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ N ОБЪЕКТОВ | 1988 |
|
SU1633990A1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ | 1990 |
|
RU1753837C |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2783257C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННО-ПИЛОТАЖНОЙ ИНФОРМАЦИИ ДЛЯ СУДОВ И ОТВЕТЧИК | 1993 |
|
RU2075763C1 |
| Способ мониторинга пространственно-временного состояния группы подвижных объектов | 2023 |
|
RU2809923C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2013 |
|
RU2529867C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |

Способ определения относительного местоположения n объектов относится к радиотехнике и может быть использован в радионавигационных и связных системах для определения на каждом объекте относительного местоположения остальных объектов. Цель - повышение точности измерения дальности за счет независимости ее от угла между направлением на данный источник ответа и на предыдущий источник ответа. Поставленная цель достигается тем, что на i-м объекте измеряют задержку распространения, синхронизируют собственный дальномерный код под принимаемый, из информационного обмена выделяют значения аналогичных задержек, измеренных на других объектах, вычисляют дальности до остальных объектов и сообщают в информационном обмене измеренные и вычисленные задержки другим объектам группы. 8 ил.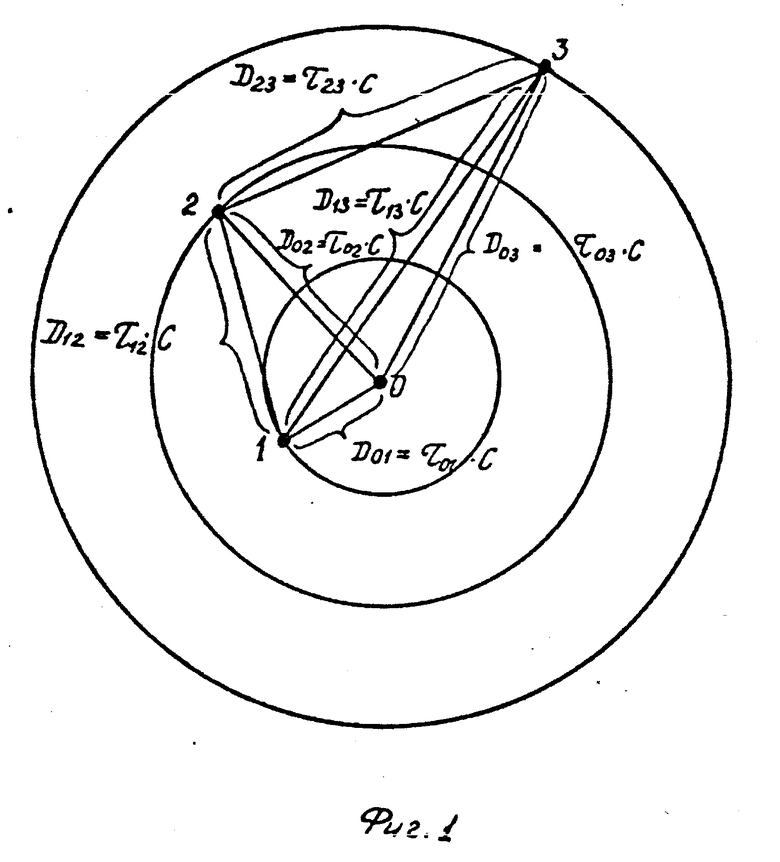
Способ определения относительного местоположения n объектов, заключающийся в том, что одновременно измеряют время распространения запросно-ответных сигналов между объектами и измеряют направление прихода запросно-ответных сигналов, отличающийся тем, что формируют запросные сигналы в момент приема ответных сигналов на i-м объекте, причем адресату (i + 1)-го объекта присваивают признак передачи этому объекту инициативы формирования следующего запросно-ответного сигнала, при этом следующим после n-го является первый объект, а при поступлении на i-й объект запросно-ответного и ответных сигналов на нем измеряют направление прихода всех сигналов, кроме того, при поступлении на i-й объект запросно-ответного и ответных сигналов на нем измеряют задержку между принимаемым в данный момент времени сигналом, закодированным дальномерным кодом и собственным сигналом, закодированным таким же дальномерным кодом, осуществляют синхронизацию собственного сигнала принятым сигналом, из общего числа задержек сигналов, передаваемых при информационном обмене между объектами, выделяют числовые значения аналогичных задержек, измеренных и вычисленных на других объектах, по задержкам, измеренным на данном объекте и принятым от других объектов, вычисляют дальности до остальных объектов по формуле
где t ϶ [0, ∞] - номер обмена в группе соответствует началу информационного обмена в группе;
i - номер объекта, на котором вычисляется задержка распространения, сигнала и соответственно дальность;
j - номер объекта, который в t-й интервал обмена находится в передаче, причем j удовлетворяет одновременно условиям
j ϶ [0,n-1] и j ≡ t(mod n),
k - коэффициент, удовлетворяющий условию (n - 2) > k > 1, k - целое число; n - число объектов в группе;
c - скорость распространения сигнала;
Di , j - дальность между i-м и j-м объектами, измеренная на i-м объекте в t-й интервал обмена в группе;
τ
a0, a1, ... , an - 2 - коэффициенты, определяемые выражением
где b - номер интервала обмена, удовлетворяющий одновременно условиям t > b ≥ n + 1 и i ≡ b(mod n);
τi,j - задержка распространения сигнала между i- и j-м объектами в b-й интервал обмена в группе, измеренные и вычисленные задержки сообщают другим объектам группы.
| US, патент 4359733, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
