Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для обеспечения безопасности полета группы ЛА, выполняющих совместные действия в сложных навигационных условиях, в том числе, при выходе из строя спутниковой радионавигационной системы (СРНС). Известные способы определения относительного положения ЛА предполагают определение положения каждого из группы ЛА, по крайней мере, одним из навигационных способов и передачу данных о положении через каналы информационного обмена между всеми ЛА и, дополнительно, например, локационным способом путем излучения и приема зондирующих сигналов каждым ЛА с целью определения положения соседнего ЛА [1-5]. Необходимость дополнительного определения положения в этих патентах объясняется недостаточной точностью и надежностью определения взаимного положения навигационным способом.
В упомянутых патентах для повышения точности навигационного способа определения относительного положения используется спутниковая радионавигационная система и передача данных о положении между ЛА и, дополнительно, из-за низкой надежности спутниковых данных, определение относительного положения соседних ЛА с помощью датчика относительного положения, построенного, например, на локационном способе.
В патенте [1] в качестве такого датчика используется радиолокационная станция межсамолетной навигации РЛС-МСН, в [2] - измеритель интенсивности высокочастотного сигнала, передаваемого соседним ЛА, в [3] и [4] - миллиметровый радар, в [5] - дальномерная система.
Если бы СРНС и передача данных обладали достаточной надежностью, требуемой для управления ЛА, дополнительные датчики относительного положения не потребовались. Существующие СРНС типа GPS и ГЛОНАСС имеют вероятность выдачи ошибочных данных 10-4 в час [6], что не удовлетворяет современным требованиям безопасности полета ЛА. По этой причине в существующих способах относительной навигации и управления полетом группы ЛА используют дополнительные системы определения относительного положения.
Во всех упомянутых патентах предполагается наличие работоспособной СРНС. Если СРНС становится неработоспособной, например, из-за уничтожения навигационных спутников или в связи с постановкой помех в зоне действия группы ЛА, то определение относительного положения ЛА становится возможным только благодаря функционированию дополнительной системы определения относительного положения.
Наиболее распространенным предложением построения дополнительной системы определения относительного положения в патентах [1-4] является использование радиолокационного способа, позволяющего определить дальность и угловое положение соседних ЛА. Основным недостатком такого способа (и, вообще, первичной радио, тепловой и оптической локации) по отраженному от цели сигналу является отсутствие опознавания цели. Для опознавания цели в авиационной практике управления воздушным движением находит применение способ вторичной радиолокации, при котором на ЛА устанавливаются ответчики радиолокационных сигналов, передающие, кроме ответного дальномерного сигнала, также информационный сигнал [7]. Использование ответчиков также повышает точность и надежность радиолокационного способа. Недостатком радиолокационного способа является сложность реализации. Например, в [3] для обзора пространства вокруг ЛА предлагается применить шесть локаторов.
Более простым в реализации является дальномерный метод [5] с использованием ответчиков, который решает задачу измерения дальности между ЛА и задачу опознавания. При этом предполагается наличие системы синхронизации работы аппаратуры ЛА, работающей в режиме с временным разделением доступа к общему частотному каналу связи [8].
Согласно [5, 8], обмен информацией между ЛА в группе из небольшого числа ЛА (до 12) осуществляется в режиме TDMA (Time-Division Multiple Access - множественный доступ с временным разделением). С этой целью в [5] предложена операция формирования сигналов синхронизации, обеспечивающая разделение времени приема и передачи навигационной информации. Для этого формируется интервальная временная сетка с периодом Тц, состоящая из n интервалов информационного обмена. Сигнал начала кадра информационного обмена всех ЛА синхронизируется меткой времени СРНС (например, секундной меткой). Период Тц равен Тц=nτио, где n - число интервалов информационного обмена в Тц, τио - длительность интервала информационного обмена. Интервалы информационного обмена закреплены за каждым ЛА (число интервалов информационного обмена соответствует числу ЛА).
В [9, 10] предложен обмен информацией между ЛА в группе из произвольного числа ЛА, который осуществляется в режиме STDMA (Self-Organized Time-Division Multiple Access -самоорганизующийся множественный доступ с временным разделением). В этом случае интервалы информационного обмена не закреплены за каждым ЛА и для выбора интервала применяется метод уведомлений «интервал занят/свободен», реализуемый в три этапа: запрос на получение рабочего интервала, прием списка доступных интервалов, случайный выбор рабочего интервала (рабочих интервалов) из списка доступных интервалов.
Недостатком такого способа информационного обмена в режиме STDMA [9, 10] является большая временная задержка в распределении интервалов информационного обмена при изменении числа ЛА, что недопустимо при выполнении групповых действий ЛА.
Общим недостатком упомянутых способов является то, что синхронизация интервальной временной сетки выполняется только по сигналам синхронизации СРНС, отказ которой ведет к неработоспособности операции формирования сигналов синхронизации. При этом точность временного разделения обмена информацией при отказе СРНС зависит исключительно от качества бортовых эталонов времени.
Таким образом, отказ СРНС приводит, во-первых, к нарушению синхронизации при обмене в режиме TDMA и, во-вторых, к невозможности определения относительного положения ЛА из-за отсутствия навигационной информации СРНС.
Способ-прототип [11] состоит в том, что предлагается способ определения относительного положения при межсамолетной навигации в общем случае N летательных аппаратов (ЛА), предусматривающий для каждого ЛА определение относительного положения соседних ЛА по отношению к данному ЛА первым и вторым способами, комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами. Первый способ предусматривает определение навигационной информации каждого ЛА по спутникам СРНС, передачу упомянутой информации соседним ЛА и прием навигационной информации соседних ЛА через каналы информационного обмена путем формирования сигналов синхронизации для временного разделения передачи и приема навигационной информации. Второй способ предусматривает определение локационной информации с помощью передачи и приема зондирующих сигналов каждым ЛА и определение относительных дальностей соседних ЛА.
Для обеспечения временного разделения сигналов информационного обмена первого способа и временного разделения зондирующих сигналов второго способа формируют общие сигналы синхронизации для первого и второго способов на основе комплексной обработки временных параметров сигналов синхронизации первого и второго способов.
При этом для формирования сигналов синхронизации в первом способе измеряют время прихода сигналов от спутников СРНС. Во втором способе при определении локационной информации передают дополнительные сигналы синхронизации соседним ЛА, последовательно производят выделение этих сигналов, измерение времени прихода этих сигналов синхронизации, преобразование упомянутого времени к рабочему временному интервалу, компенсацию временных задержек на основе учета относительных дальностей соседних ЛА.
Далее по измеренным в первом и втором способах временам прихода сигналов синхронизации выполняют комплексную обработку временных параметров сигналов синхронизации первого и второго способов, например, с помощью калмановской фильтрации, причем для обеспечения взаимного обмена информацией между ЛА формируют на всех ЛА корректируемую шкалу времени, настройку которой выполняют по выходным сигналам комплексной обработки временных параметров сигналов синхронизации первого и второго способов.
Предлагается вариант способа, в котором зондирующие сигналы при определении локационной информации используются одновременно в качестве сигналов синхронизации второго способа.
Недостатком способа является то, что способ работает только при одновременном функционировании первого способа определения относительного положения ЛА и синхронизации по спутниковой информации и второго способа определения относительного положения и синхронизации с помощью зондирующих сигналов. Если СРНС перестает работать, то происходит постепенная потеря точностных характеристик калмановской фильтрации, и синхронизация нарушается. Кроме того, в варианте способа, использующем зондирующие сигналы одновременно в качестве сигналов синхронизации, при отсутствии синхронизации по первому способу может происходить перепутывание сигналов от различных ЛА. Синхронизация обязательно должна предшествовать определению положения с помощью зондирующих сигналов.
Общим недостатком прототипа и аналогов изобретения является уменьшение точности синхронизации временного разделения передачи и приема навигационной информации с дальнейшей потерей синхронизации при потере работоспособности СРНС.
Задачей (техническим результатом) - повышение надежности операций формирования сигналов синхронизации при определении относительного положения ЛА.
Поставленная задача решается следующим образом.
Предлагается способ определения относительного положения в общем случае группы летательных аппаратов (ЛА), состоящей из ведущего ЛА и соседних ЛА, предусматривающий для каждого ЛА группы определение относительного положения всех других ЛА по отношению к данному ЛА первым и вторым способами, комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами, при этом первый способ предусматривает определение навигационной информации каждого ЛА по спутникам спутниковой радионавигационной системы (СРНС), передачу упомянутой информации всем другим ЛА и прием навигационной информации всех других ЛА через канал информационного обмена путем формирования сигналов синхронизации для временного разделения передачи и приема навигационной информации, а второй способ предусматривает для каждого ЛА определение относительных дальностей всех других ЛА, отличающийся тем, что определение относительных дальностей ЛА производится путем передачи и приема навигационной информации через канал информационного обмена с временным разделением, первый и второй способы используются совместно при наличии признака «СРНС работоспособна», а при наличии признака «СРНС неработоспособна» используется только второй способ, при этом при наличии признака «СРНС работоспособна» на каждом ЛА сигналы синхронизации формируют на основе определения навигационной информации ЛА по спутникам СРНС, из сигналов синхронизации формируют кадр информационного обмена, передают в упомянутом кадре навигационную информацию СРНС и пилотажно-навигационного комплекса (ПНК) всем другим ЛА и принимают навигационную информацию СРНС и ПНК от всех других ЛА через канал информационного обмена с временным разделением, определяют на основе принятой навигационной информации СРНС и ПНК относительные дальности до всех других ЛА и вычисляют относительные координаты ЛА, а при наличии признака «СРНС неработоспособна» на ведущем ЛА сигналы синхронизации ведущего ЛА формируют автономно, из упомянутых сигналов формируют кадр синхронизации ведущего ЛА, на каждом соседнем ЛА сигналы синхронизации формируют автономно, из упомянутых сигналов синхронизации формируют кадр синхронизации соседнего ЛА, последовательно в кадре синхронизации ведущего ЛА передают запросы синхронизации от ведущего ЛА каждому соседнему ЛА, совпадающие с сигналами синхронизации ведущего ЛА, в кадре синхронизации каждого соседнего ЛА принимают запросы синхронизации ведущего ЛА этому соседнему ЛА и передают ответы синхронизации ведущему ЛА, в кадре синхронизации ведущего ЛА принимают ответы синхронизации от каждого соседнего ЛА, измеряют задержку распространения до каждого соседнего ЛА, передают данные о задержке распространения каждому соседнему ЛА, в кадре синхронизации каждого соседнего ЛА принимают данные о задержке распространения от ведущего ЛА, корректируют временное положение сигналов синхронизации каждого соседнего ЛА, затем из сигналов синхронизации ведущего ЛА формируют на ведущем ЛА кадр информационного обмена со всеми другими ЛА, из корректированных сигналов синхронизации каждого соседнего ЛА формируют на каждом соседнем ЛА кадр информационного обмена со всеми другими ЛА, в упомянутых кадрах передают навигационную информацию ПНК всем другим ЛА и принимают навигационную информацию ПНК от всех других ЛА через канал информационного обмена с временным разделением, определяют на основе принятой навигационной информации ПНК относительные дальности до всех других ЛА и вычисляют относительные координаты ЛА, причем комплексную обработку информации об относительном положении ЛА на всех ЛА производят только на основе вычисленных относительных дальностей.
Предлагается вариант способа, в котором в качестве ведущего служит ЛА, который в режиме встречи с ЛА - танкером для дозаправки топливом определяет свое положение относительно танкера и обменивается с ним информацией об относительном положении.
Предлагается вариант способа, в котором в качестве ведущего служит ЛА, осуществляющий заход на посадку по данным СРНС, которыми он обменивается с наземными одной или несколькими контрольно - корректирующими станциями, получает от них по каналу информационного обмена первого способа информацию, корректирующую измерения на ведущем ЛА по данным СРНС и обеспечивающую вычисление курсовых и глиссадных отклонений от траектории посадки. При этом в случае неработоспособности СРНС данный вариант способа предусматривает построение траектории посадки и вычисление отклонений от нее на основе измерения на заходящем на посадку ЛА своего положения относительно локальных контрольно-корректирующих станций с известными координатами, оборудованных аналогично заходящему на посадку ЛА.
Предлагается вариант способа, в котором в качестве ведущего служит наземный или корабельный пункт, называемый далее ведущим объектом, положение ЛА определяется относительно ведущего объекта и используется для захода на посадку и посадки ЛА на наземный аэродром или палубу корабля.
Предлагается вариант способа, в котором каждый ЛА и ведущий объект для определения относительных дальностей в кадре информационного обмена передает информационную посылку, фиксирует момент передачи и в той же информационной посылке передает значение момента передачи, а все другие ЛА принимают упомянутую информационную посылку, фиксируют моменты приема упомянутой посылки, вычисляют задержки распространения и смещения временных шкал приема относительно временной шкалы передачи посылки и вычисляют относительную дальность до ЛА или ведущего объекта, передавшего информационную посылку.
Предлагается вариант способа, в котором сигнал символьной синхронизации информационной посылки в кадре информационного обмена идентичен сигналу синхронизации.
Предлагается система, реализующая любой из предлагаемых способов определения относительного положения, состоящая из бортового оборудования ведущего ЛА (ведущего объекта) и бортового оборудования каждого из соседних ЛА, каждое из которых содержит приемник СРНС, соединенный с приемной антенной СРНС, приемопередающее устройство линии передачи данных, соединенное с приемной и передающей антеннами линии передачи данных, формирователь сигналов синхронизации, устройство информационного обмена, вычислитель относительных координат ЛА и устройство комплексной обработки информации об относительном положении ЛА, при этом дополнительно введены в бортовое оборудование ведущего ЛА (ведущего объекта) последовательно соединенные формирователь запросов синхронизации, измеритель задержки распространения и схема «ИЛИ» ведущего ЛА, а также измеритель относительных дальностей и демодулятор ответов синхронизации, а в бортовое оборудование каждого из соседних ЛА введены последовательно соединенные демодулятор запроса синхронизации и данных о задержке, формирователь ответа синхронизации и схема «ИЛИ» соседнего ЛА, а также измеритель относительных дальностей, при этом в бортовом оборудовании ведущего ЛА (ведущего объекта) на первый вход формирователя сигналов синхронизации и первый вход устройства комплексной обработки информации об относительном положении ЛА подается признак работоспособности СРНС, на второй вход формирователя сигналов синхронизации и первый вход устройства информационного обмена подается номер «своего» ЛА, третий вход формирователя сигналов синхронизации соединен с первым выходом приемника СРНС, второй выход которого соединен с вторым входом устройства информационного обмена, первым входом вычислителя относительных координат и с вторым входом устройства комплексной обработки информации об относительном положении ЛА, первый, второй и третий выходы упомянутого формирователя сигналов синхронизации соединены соответственно с входом формирователя запросов синхронизации, с третьим и четвертым входами устройства информационного обмена, на пятый вход которого подается информация ПНК, шестой вход которого соединен с выходом приемопередающего устройства линии передача данных и входом демодулятора ответов синхронизации, выход которого соединен с вторым входом измерителя задержки распространения, первый, второй, третий и четвертый выходы упомянутого устройства информационного обмена соединены соответственно с вторым входом схемы «ИЛИ» ведущего ЛА, вторым входом вычислителя относительных координат, первым и вторым входами измерителя относительных дальностей, выход которого соединен с третьим входом вычислителя относительных координат, первый и второй выходы которого соединены соответственно с третьим и четвертым входами устройства комплексной обработки информации об относительном положении ЛА, выход которого является выходом относительного положения бортового оборудования ведущего ЛА (ведущего объекта), а второй выход упомянутого формирователя запросов синхронизации соединен с третьим входом схемы «ИЛИ» ведущего ЛА, выход которой соединен с входом приемопередающего устройства линии передачи данных, а в бортовом оборудовании каждого из соседних ЛА на первый вход формирователя сигналов синхронизации и первый вход устройства комплексной обработки информации об относительном положении ЛА подается признак работоспособности СРНС, на второй вход формирователя сигналов синхронизации и первый вход устройства информационного обмена подается номер «своего» ЛА, третий вход формирователя сигналов синхронизации соединен с первым выходом приемника СРНС, второй выход которого соединен с вторым входом устройства информационного обмена, первым входом вычислителя относительных координат и с вторым входом устройства комплексной обработки информации об относительном положении ЛА, первый и второй выходы упомянутого формирователя сигналов синхронизации соединены соответственно с третьим и четвертым входами устройства информационного обмена, на пятый вход которого подается информация ПНК, шестой вход которого соединен с выходом приемопередающего устройства линии передачи данных и с входом демодулятора запроса синхронизации и данных о задержке, первый, второй, третий, четвертый и пятый выходы упомянутого устройства информационного обмена соединены соответственно с вторым входом схемы «ИЛИ» соседнего ЛА, вторым входом вычислителя относительных координат, четвертым входом формирователя сигналов синхронизации, первым и вторым входами измерителя относительных дальностей, выход которого соединен с третьим входом вычислителя относительных координат ЛА, первый и второй выходы которого соединены соответственно с третьим и четвертым входами устройства комплексной обработки информации об относительном положении ЛА, выход которого является выходом относительного положения бортового оборудования соседнего ЛА, а выход схемы «ИЛИ» соседнего ЛА соединен с входом приемопередающего устройства линии передачи данных.
Суть заявляемых способа и системы поясняется с помощью Фиг. 1 - Фиг. 22.
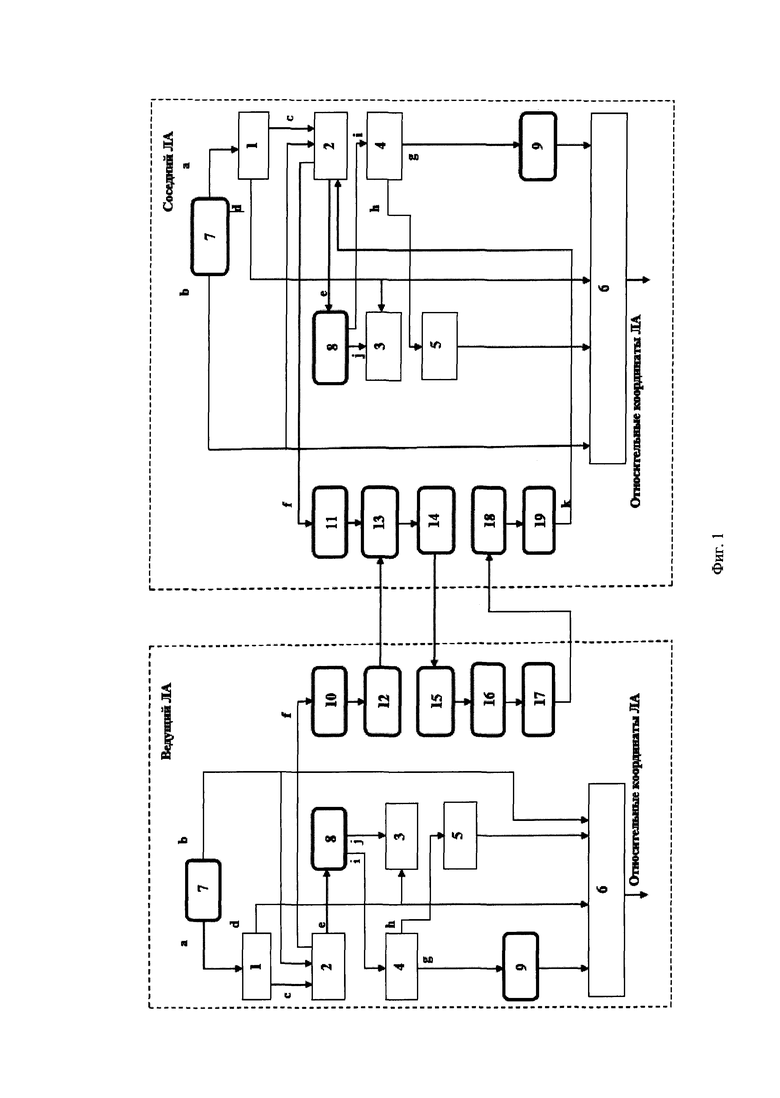
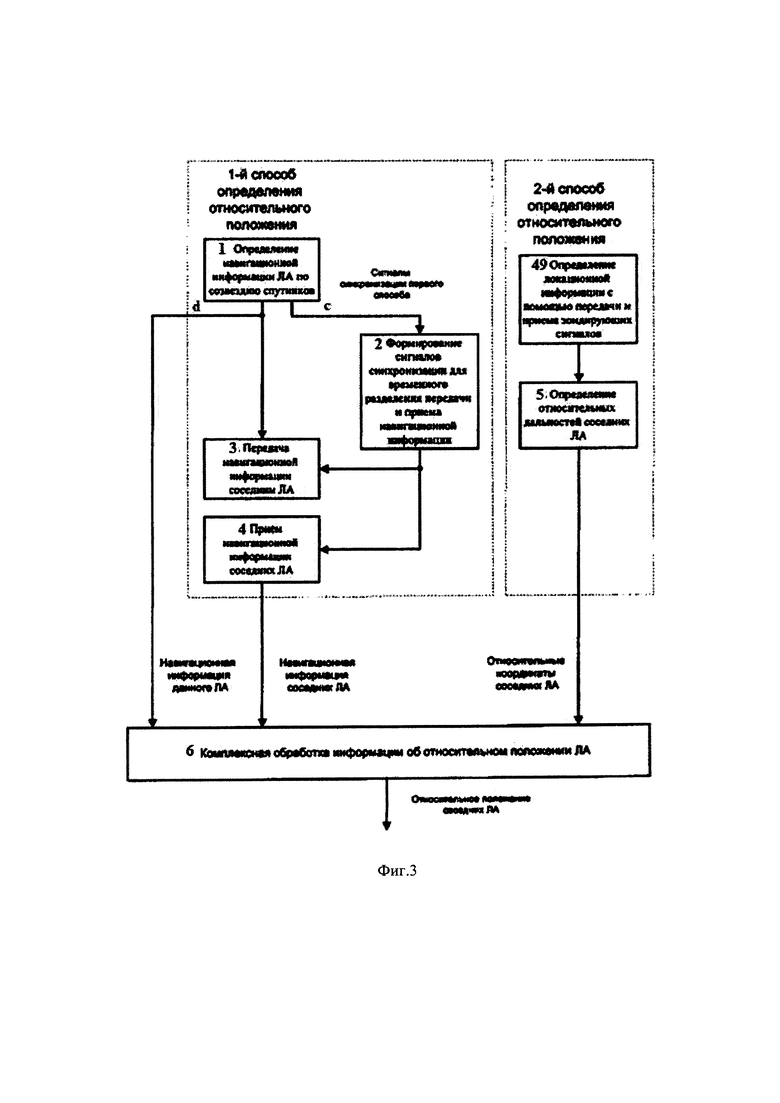
На Фиг. 1 представлена блок-схема основной последовательности операций предложенного способа определения относительного положения ЛА. Операции, используемые в способе-прототипе, выделены прямоугольниками с тонкими линиями, вновь предложенные операции выделены прямоугольниками с толстыми линиями и закругленными углами.
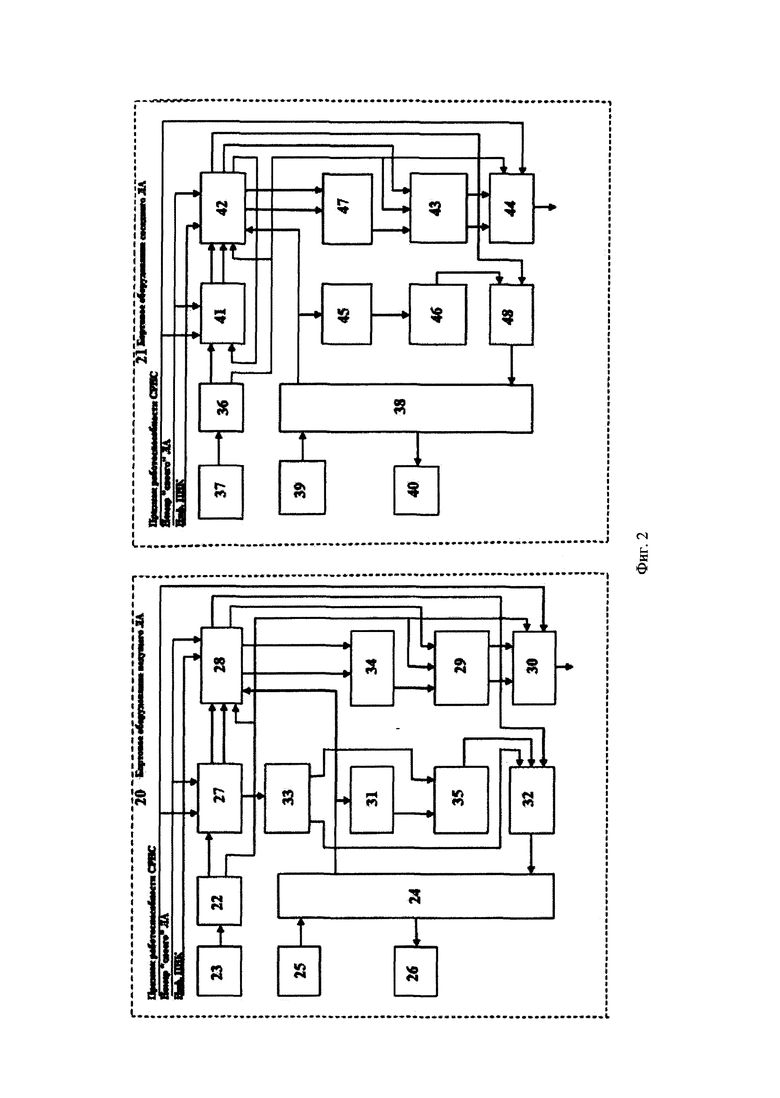
На Фиг. 2 представлена блок-схема предлагаемой системы, реализующей предлагаемый способ определения относительного положения ЛА. Устройства, используемые в системе-прототипе, на Фиг. 2 выделены прямоугольниками с тонкими линиями, вновь предложенные устройства выделены прямоугольниками с толстыми линиями и закругленными углами.
На Фиг. 3 приведена блок-схема последовательности действий по способу-прототипу с расшифровкой обозначений.
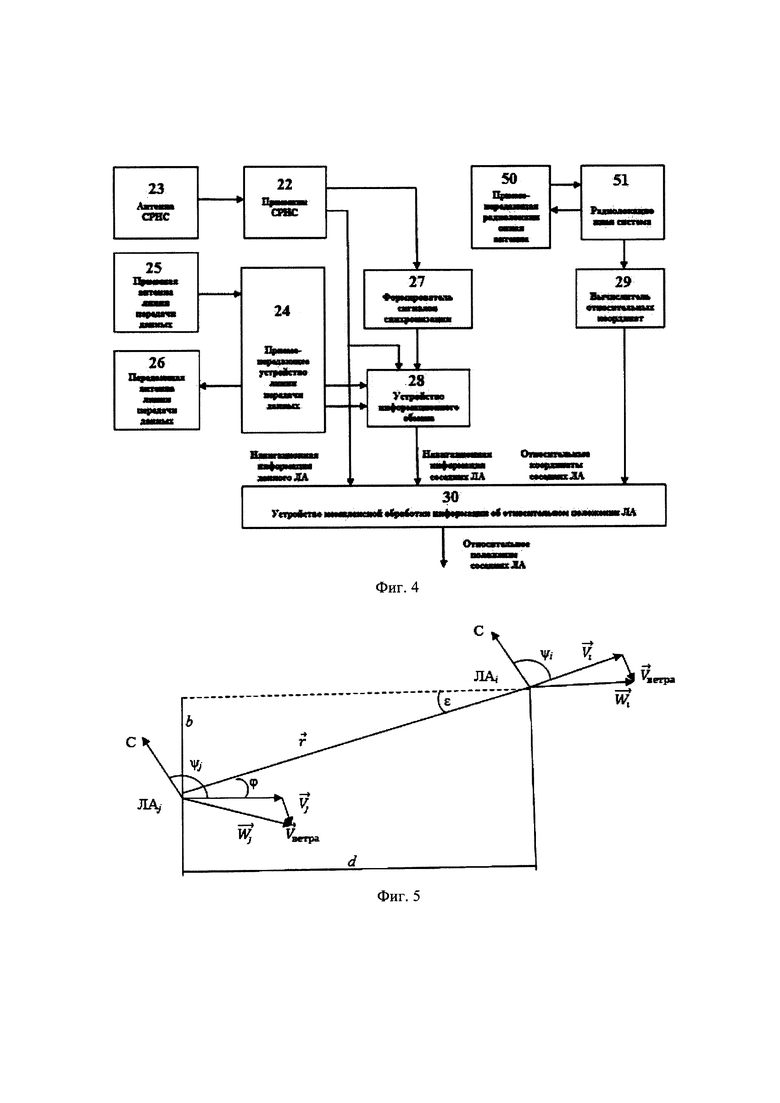
На Фиг. 4 приведена блок-схема системы - прототипа с расшифровкой обозначений.
На Фиг. 5 приведена кинематическая схема первого определения дистанции и интервала.
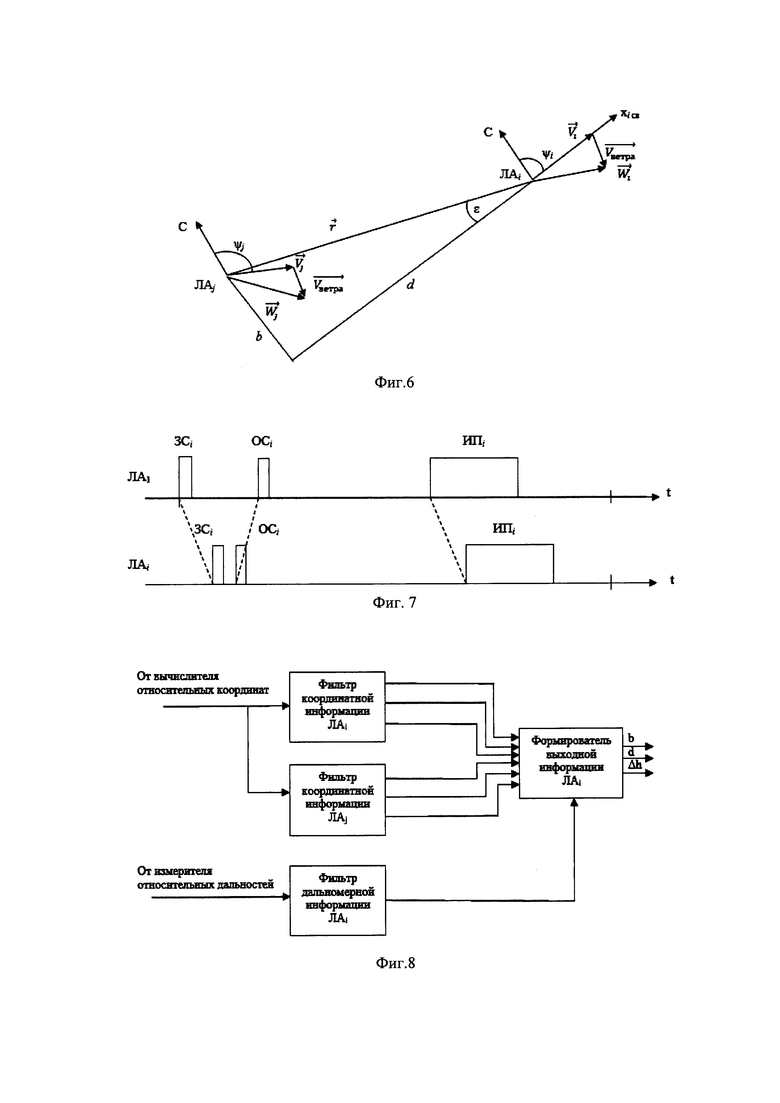
На Фиг. 6 приведена кинематическая схема второго определения дистанции и интервала.
На Фиг. 7 приведена циклограмма обмена JIA1 с ЛАi в кадре синхронизации.
На Фиг. 8 приведена структура алгоритма комплексной обработки информации.
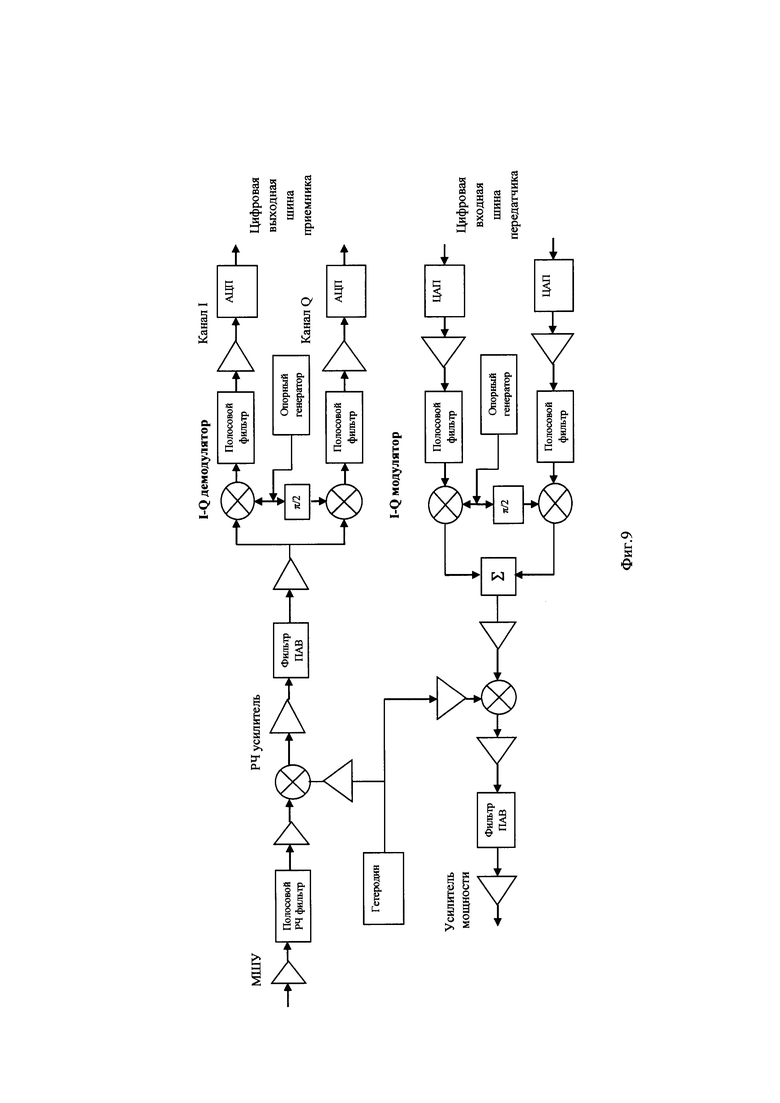
На Фиг. 9 приведен пример реализации приемопередающего устройства линии передачи данных ведущего ЛА 24 и приемопередающего устройства линии передачи данных соседнего ЛА 38 в виде супергетеродинного приемопередатчика.
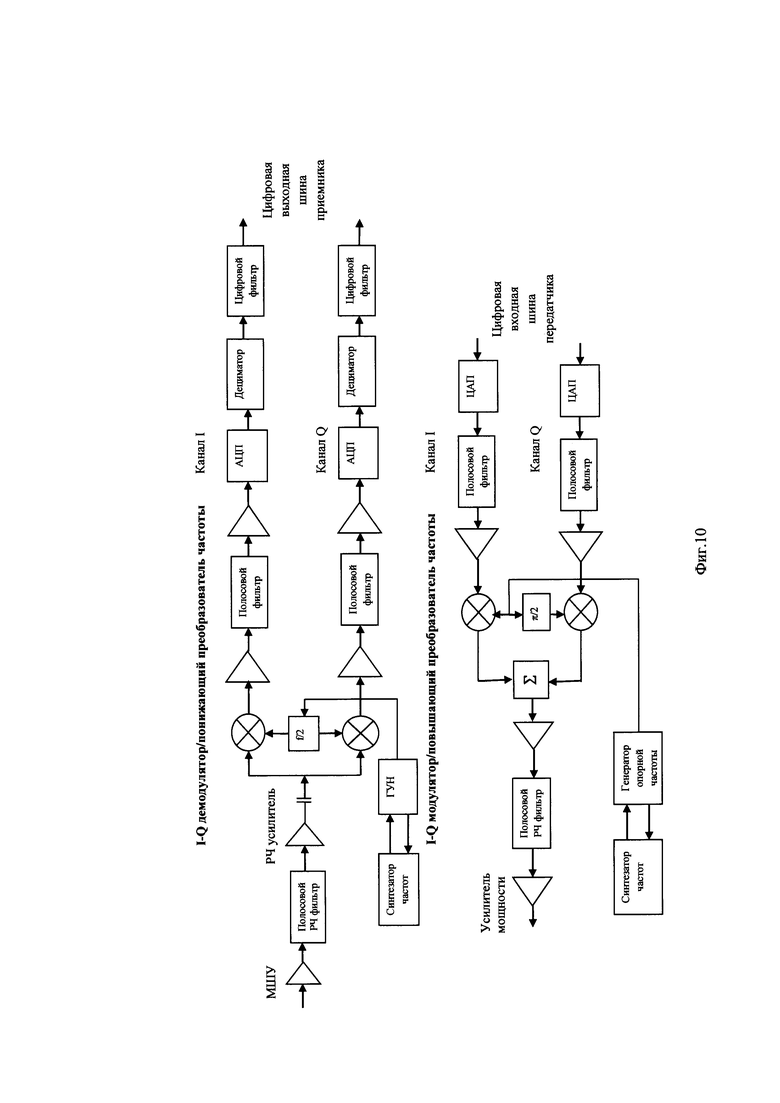
На Фиг. 10 приведен пример реализации приемопередающего устройства линии передачи данных ведущего ЛА 24 и приемопередающего устройства линии передачи данных соседнего ЛА 38 в виде приемопередатчика прямого преобразования.
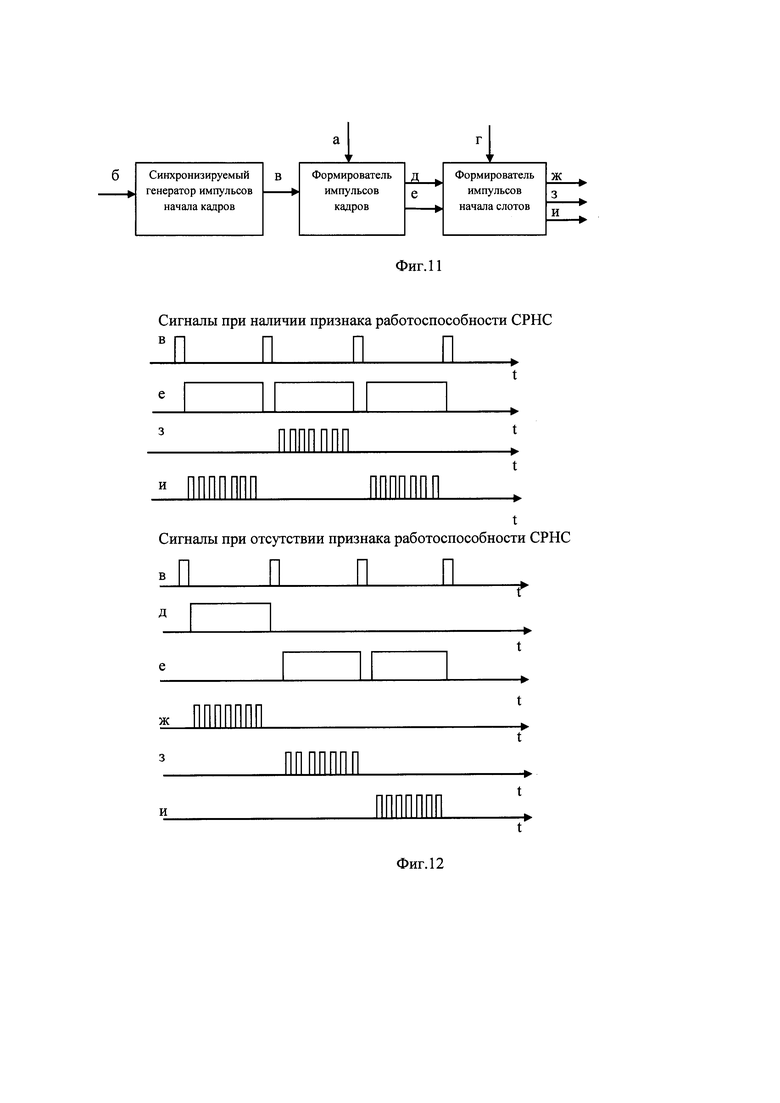
На Фиг. 11 приведена структурная схема формирователя сигналов синхронизации 27.
На Фиг. 12 приведены временные диаграммы работы формирователя сигналов синхронизации 8.
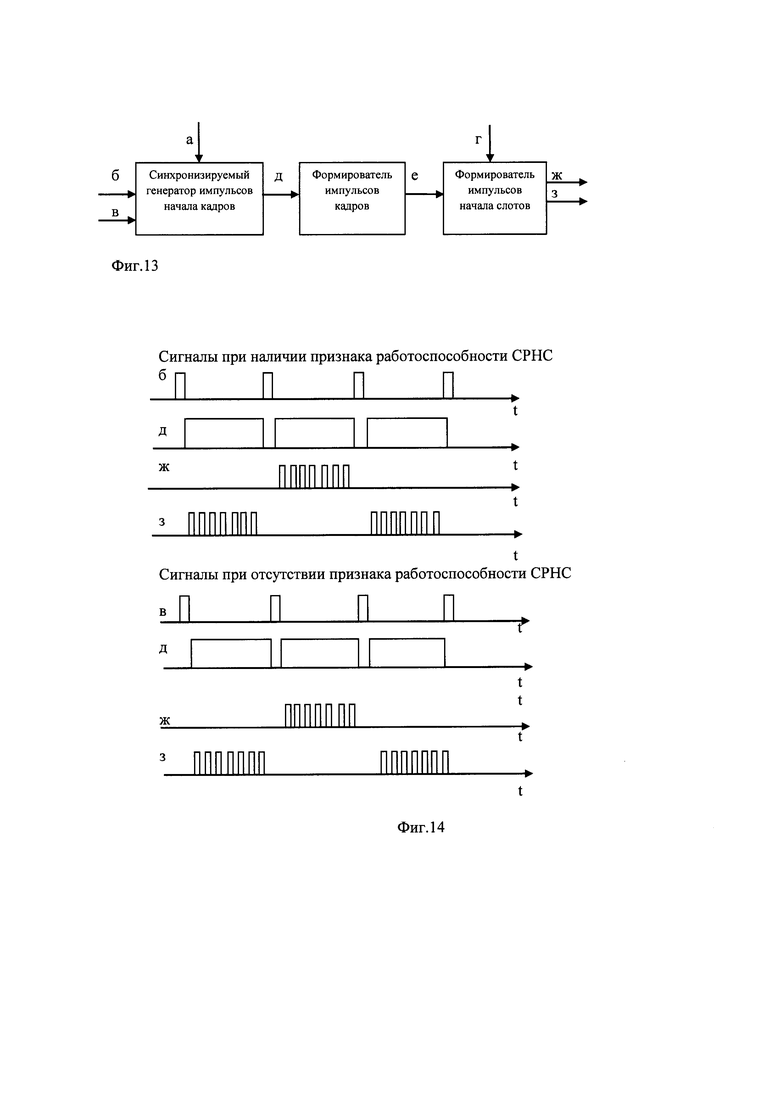
На Фиг. 13 приведена структурная схема формирователя сигналов синхронизации 41.
На Фиг. 14 приведены Временные диаграммы работы формирователя сигналов синхронизации 41.
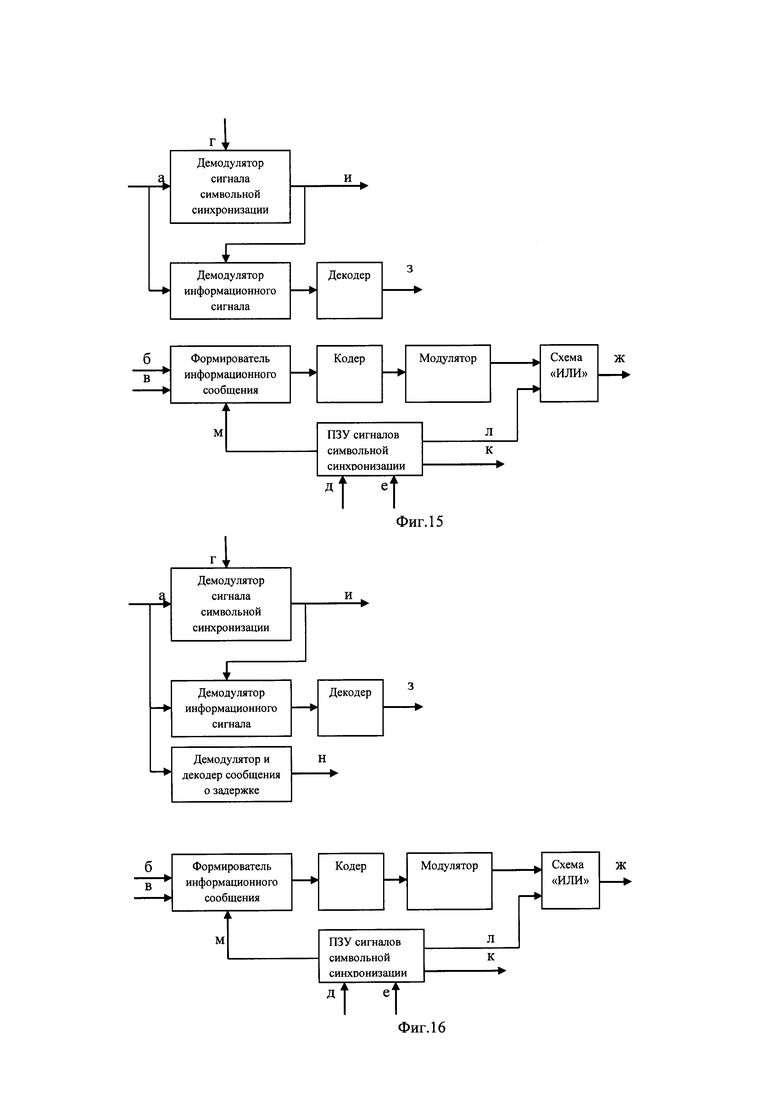
На Фиг. 15 приведена структурная схема устройства информационного обмена 28.
На Фиг. 16 приведена структурная схема устройства информационного обмена 42.
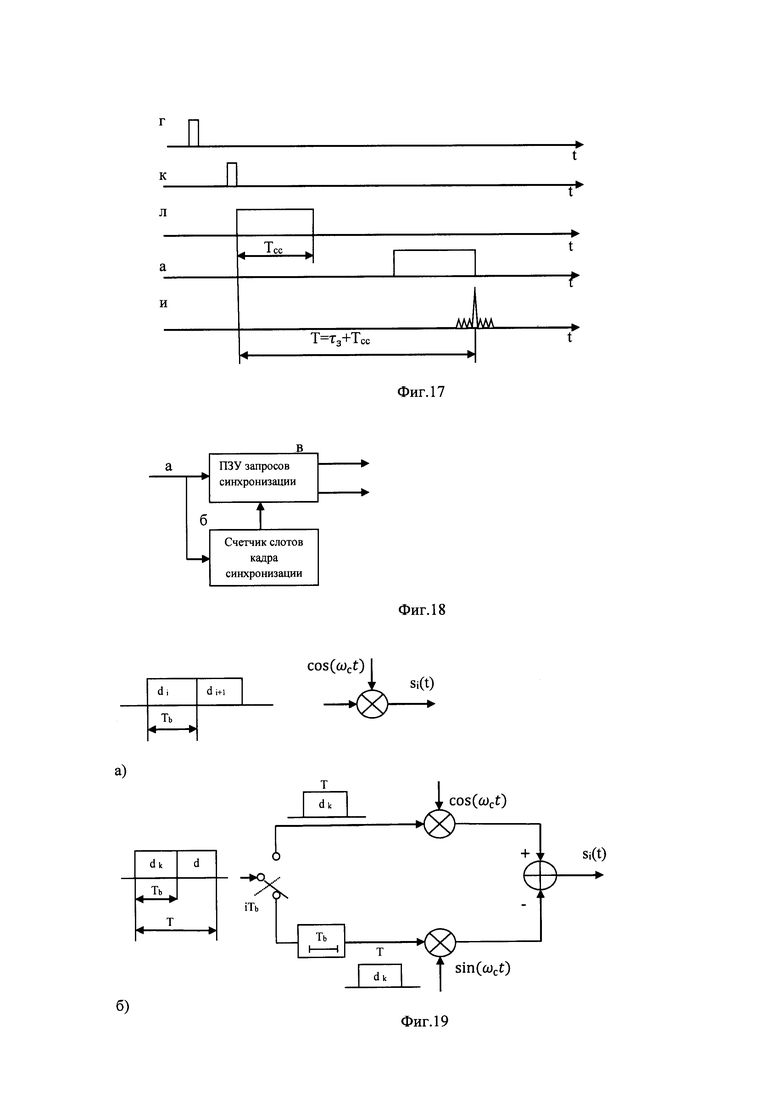
На Фиг. 17 приведены временные диаграммы работы устройства информационного обмена 28 при приеме в i-м слоте кадра информационного обмена, поясняющие формирование сигналов для измерения относительной дальности.
На Фиг. 18 приведена структурная схема формирователя запросов синхронизации 33.
На Фиг. 19 приведены примеры реализации модулятора сигнала запроса синхронизации в формирователе запросов синхронизации 33 и модулятора сигнала ответа синхронизации в формирователе ответов синхронизации 46: а) реализация модулятора BPSK; б) реализация модулятора QPSK.
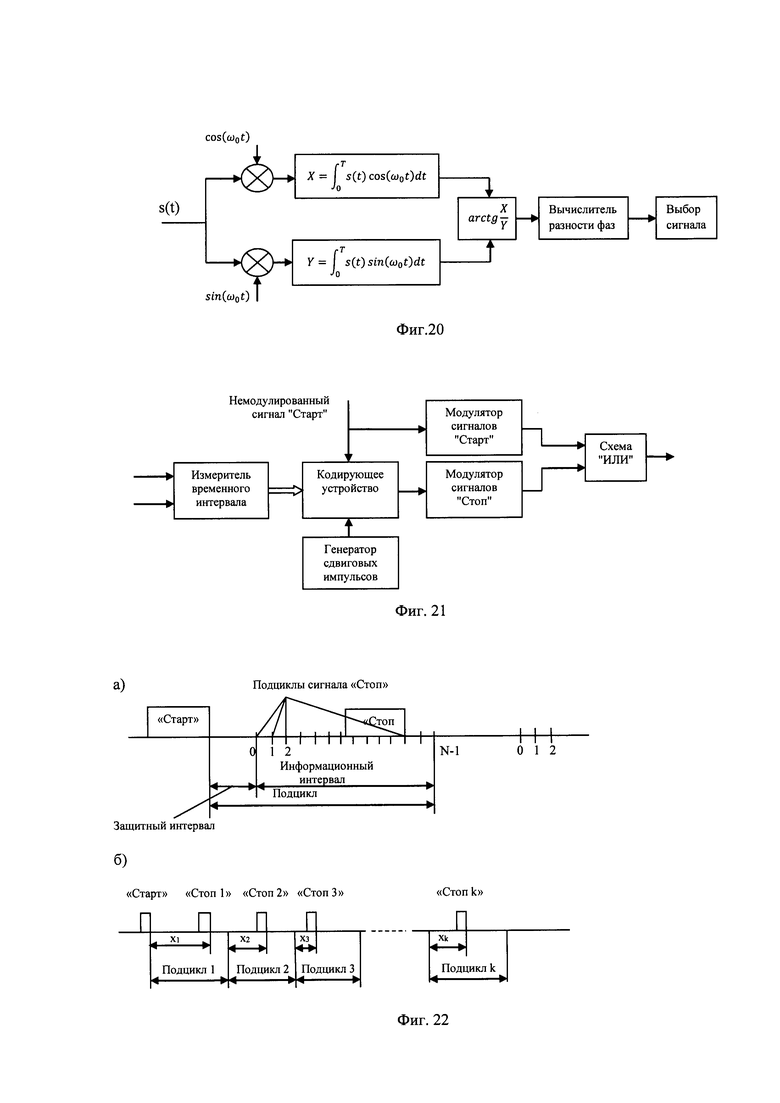
На Фиг. 20 приведен пример реализации демодулятора ответов синхронизации 31 и демодулятора запросов синхронизации 45 в виде демодулятора сигналов MPSK
На Фиг. 21 приведена структурная схема измерителя задержки распространения 35.
На Фиг. 22 приведена структура сигнала при временном способе кодирования: а) структура одного подцикла; б) полный состав информационного сигнала
На фиг. 1 и фиг. 3 приняты следующие обозначения:
1. Определение навигационной информации каждого ЛА по спутников СРНС. Выход «с» - временная метка СРНС, выход «d» - навигационная информация ЛА по спутникам СРНС.
2. Формирование сигналов синхронизации для временного разделения передачи и приема сигналов ЛА. Выход «е» - сигнал начала кадра информационного обмена, выход «f» - сигнал начала кадра синхронизации при неработоспособной СРНС.
3. Передача навигационной информации всем другим ЛА через каналы информационного обмена с временным разделением.
4. Прием навигационной информации всех других ЛА через каналы информационного обмена с временным разделением. Выход «g» - навигационная информация для определения относительных дальностей ЛА, выход «h» - навигационная информация для комплексной обработки информации об относительном положении ЛА.
5. Определение относительных дальностей всех других ЛА.
6. Комплексная обработка информации об относительном положении ЛА.
7. Прием признака работоспособности СРНС. Выход «а» - признак «СРНС работоспособна», выход «в» - признак «СРНС неработоспособна».
8. Формирование кадра информационного обмена со всеми другими ЛА.
9. Вычисление относительных координат ЛА.
10. Формирование кадра синхронизации ведущего ЛА.
11. Формирование кадра синхронизации каждого соседнего ЛА.
12. Последовательная передача запросов синхронизации от ведущего ЛА каждому соседнему ЛА.
13. Последовательный прием запросов синхронизации ведущего ЛА каждым соседним ЛА.
14. Последовательная передача ответов синхронизации ведущему ЛА каждым соседним ЛА.
15. Последовательный прием ответов синхронизации ведущим ЛА от каждого соседнего ЛА.
16. Последовательное измерение задержек распространения на ведущем ЛА от каждого соседнего ЛА.
17. Последовательная передача данных о задержках распространения ведущим ЛА каждому соседнему ЛА.
18. Последовательный прием данных о задержках распространения от ведущего ЛА каждым соседним ЛА.
19. Корректировка временного положения сигналов синхронизации циклограммы каждого соседнего ЛА. Выход «k» - сигнал корректировки синхронизации циклограммы.
49. Определение локационной информации с помощью передачи и приема зондирующих сигналов.
На Фиг. 2 приняты следующие обозначения:
20. Бортовое оборудование ведущего ЛА (ведущего объекта).
21. Бортовое оборудование соседнего ЛА.
22. Приемник СРНС ведущего ЛА.
23. Антенна СРНС ведущего ЛА.
24. Приемопередающее устройство линии передачи данных ведущего ЛА (ведущего объекта).
25. Приемная антенна линии передачи данных ведущего ЛА (ведущего объекта).
26. Передающая антенна линии передачи данных ведущего ЛА (ведущего объекта).
27. Формирователь сигналов синхронизации ведущего ЛА (ведущего объекта).
28. Устройство информационного обмена ведущего ЛА (ведущего объекта).
29. Вычислитель относительных координат ЛА ведущего ЛА (ведущего объекта).
30. Устройство комплексной обработки информации об относительном положении ЛА ведущего ЛА (ведущего объекта).
31. Демодулятор ответов синхронизации ведущего ЛА (ведущего объекта).
32. Схема «ИЛИ» ведущего ЛА (ведущего объекта).
33. Формирователь запросов синхронизации ведущего ЛА (ведущего объекта).
34. Измеритель относительных дальностей ведущего ЛА (ведущего объекта).
35. Измеритель задержки распространения.
36. Приемник СРНС соседнего ЛА.
37. Антенна СРНС соседнего ЛА.
38. Приемопередающее устройство линии передачи данных соседнего ЛА.
39. Приемная антенна линии передачи данных соседнего ЛА.
40. Передающая антенна линии передачи данных соседнего ЛА.
41. Формирователь сигналов синхронизации соседнего ЛА.
42. Устройство информационного обмена соседнего ЛА.
43. Вычислитель относительных координат ЛА соседнего ЛА.
44. Устройство комплексной обработки информации об относительном положении ЛА соседнего ЛА.
45. Демодулятор запроса синхронизации соседнего ЛА.
46. Формирователь ответа синхронизации соседнего ЛА.
47. Измеритель относительных дальностей соседнего ЛА.
48. Схема «ИЛИ» соседнего ЛА.
На Фиг. 4 приняты следующие обозначения:
22. Приемник СРНС.
23. Антенна СРНС.
24. Приемопередающее устройство линии передачи данных.
25. Приемная антенна линии передачи данных.
26. Передающая антенна линии передачи данных.
27. Формирователь сигналов синхронизации.
28. Устройство информационного обмена.
29. Вычислитель относительных координат.
30. Устройство комплексной обработки информации об относительном положении ЛА.
50. Приемо-передающая радиолокационная антенна.
51. Радиолокационная система.
Структурная схема формирователя сигналов синхронизации 27 (Фиг. 11) содержит а - признак работоспособности СРНС, б - временные метки от приемника СРНС 22, в - импульсы начала кадров, г - номер «своего» ЛА (слота передачи кадра информационного обмена), д - импульсы кадров синхронизации, е - импульсы кадров информационного обмена, ж - импульсы начала слотов кадра синхронизации, з - импульсы начала слотов передачи кадра информационного обмена, и - импульсы начала слотов приема кадра информационного обмена).
Структурная схема формирователя сигналов синхронизации 41 (Фиг. 13) содержит а - признак работоспособности СРНС, б - временные метки от приемника СРНС 36, в - временные метки от устройства информационного обмена 42, г - номер «своего» ЛА (слота передачи кадра информационного обмена), д - импульсы начала кадров, е - импульсы кадров информационного обмена, ж - импульсы начала слотов передачи кадра информационного обмена, з - импульсы начала слотов приема кадра информационного обмена.
Структурная схема устройства информационного обмена 28 (Фиг. 15) содержит а - выходные сигналы приемопередающего устройства 24, б - навигационная информация ведущего ЛА по спутникам СРНС, в - информация ПНК, г - импульсы начала слотов приема кадра информационного обмена, д - импульсы начала слотов передачи кадра информационного обмена, е - номер «своего» ЛА, ж - сигналы на вход схемы «ИЛИ» 32, з - информация, принятая в кадре информационного обмена, и - демодулированный сигнал символьной синхронизации другого ЛА в слоте приема, к - немодулированный сигнал символьной синхронизации «своего» ЛА в слоте передачи, л - модулированный сигнал символьной синхронизации, м - информация о времени излучения сигнала символьной синхронизации.
Структурная схема устройства информационного обмена 42 (Фиг. 16) содержит а - выходные сигналы приемопередающего устройства 38, б - навигационная информация соседнего ЛА по спутникам СРНС, в - информация ПНК, г - импульсы начала слотов приема кадра информационного обмена, д - импульсы начала слотов передачи кадра информационного обмена, е - номер «своего» ЛА, ж - сигналы на вход схемы «ИЛИ» 48, з - информация, принятая в кадре информационного обмена, и - демодулированный сигнал символьной синхронизации другого ЛА в слоте приема, к - немодулированный сигнал символьной синхронизации «своего» ЛА в слоте передачи, л - модулированный сигнал символьной синхронизации, м - информация о времени излучения сигнала символьной синхронизации, н - сигнал коррекции временного положения импульсов начала слотов кадра информационного обмена.
Структурная схема формирователя запросов синхронизации 33 (Фиг. 18) содержит а - импульсы начала слотов кадра синхронизации, б - номер соседнего ЛА (адрес ячейки ПЗУ), в - модулированный сигнал запроса синхронизации, г - немодулированный сигнал запроса синхронизации.
На Фиг. 19 приняты следующие обозначения di={1, -1}; Tb - период бинарной последовательности; si(t) - модулированный сигнал.
Рассмотрим действия предлагаемого способа в соответствии с Фиг. 1.
Способ включает общие со способом-прототипом действия (см. Фиг. 3): определение навигационной информации каждого ЛА по спутникам СРНС 1, формирование сигналов синхронизации для временного разделения приема и передачи сигналов ЛА 2, передачу навигационной информации СРНС всем другим ЛА через канал информационного обмена с временным разделением 3, прием навигационной информации СРНС соседних ЛА через канал информационного обмена с временным разделением 4, определение локационной информации с помощью передачи и приема зондирующих сигналов 49, определение относительных дальностей всех других ЛА 5, комплексную обработку информации об относительном положении ЛА 6. Операции 1-4 составляют 1-й способ определения относительного положения ЛА, а операции 49 и 5 составляют 2-й способ.
Предложены новые действия, реализующие заявленный способ. Новизна способа, согласно Фиг. 1, состоит в том, что определение относительных дальностей ЛА по второму способу вместо определения локационной информации с помощью передачи и приема зондирующих импульсов 49 (Фиг. 2) производится путем передачи и приема навигационной информации через канал информационного обмена с временным разделением 3 и 4, первый и второй способы используются совместно при наличии признака «СРНС работоспособна» 7а, а при наличии признака «СРНС неработоспособна» 7b используется только второй способ.
При наличии признака «СРНС работоспособна» 7а формирование сигналов синхронизации для временного разделения передачи и приема сигналов ЛА 2 производится (как в прототипе) на основе определения навигационной информации СРНС по сигналам СРНС 1, координаты данного ЛА от приемника СРНС включаются в навигационную информацию для передачи соседним ЛА через канал информационного обмена с временным разделением 3, а также используются для комплексной обработки информации об относительном положении ЛА 6. Также выполняется прием навигационной информации СРНС соседних ЛА через канал информационного обмена с временным разделением 4, которая используется в комплексной обработке информации об относительном положении ЛА 6.
При наличии признака «СРНС неработоспособна» 7b на ведущем ЛА сигналы синхронизации для временного разделения передачи и приема навигационной информации 2 формируются автономно, из этих сигналов формируется кадр синхронизации ведущего ЛА 10, на каждом соседнем ЛА упомянутые сигналы синхронизации формируются также автономно, из сигналов синхронизации на соседних ЛА формируется кадр синхронизации 11. В кадре синхронизации ведущего ЛА последовательно производится передача запросов синхронизации 12 от ведущего ЛА каждому соседнему ЛА, совпадающих с сигналами синхронизации ведущего ЛА. В кадре синхронизации каждого соседнего ЛА производится прием запросов синхронизации ведущего ЛА этому соседнему ЛА 13 и передача ответов синхронизации от этого соседнего ЛА ведущему ЛА 14. В кадре синхронизации ведущего ЛА осуществляются прием ответов синхронизации от каждого соседнего ЛА 15, измерение задержек распространения до каждого соседнего ЛА 16 и передача данных о задержке распространения каждому соседнему ЛА 17. В кадре синхронизации каждого соседнего ЛА осуществляются прием данных о задержке распространения от ведущего ЛА 18 и корректировка временного положения сигналов синхронизации 19.
По окончании кадра синхронизации на ведущем ЛА производится формирование кадра информационного обмена со всеми другими ЛА 8, на каждом соседнем ЛА из корректированных сигналов синхронизации производится формирование кадра информационного обмена со всеми другими ЛА 8. В упомянутых кадрах информационного обмена производятся (как в прототипе) передача 3 и прием 4 через канал информационного обмена с временным разделением навигационной информации ПНК всех ЛА, определяются относительные дальности до всех других ЛА 5. На основе навигационной информации ПНК и относительных дальностей вычисляются относительные координаты ЛА 9. Комплексная обработка информации об относительном положении ЛА на всех ЛА 6 производится только на основе определения относительных дальностей.
Поясним подробнее алгоритмы формирования и обработки информации в способе Фиг. 1.
Определение относительных координат в неавтономном режиме на всех ЛА на основе информации СРНС, измеренной на данном ЛА и полученной по линии передачи данных, описано в литературе [8].
Основными измеряемыми параметрами являются абсолютные координаты ЛА и составляющие вектора скорости. Абсолютные координаты ЛА и составляющие скорости передаются по каналу информационного обмена на другие ЛА. На собственном ЛА эти данные могут использоваться для комплексной обработки информации (КОИ) совместно с дальномерными измерениями. Результатом КОИ являются оценки относительных координат взаимодействующих ЛА группы.
При групповом вождении ЛА параметры строя ЛА, как правило, задаются значениями трех величин: линейный интервал b (расстояние в направлении траверза), линейная дистанция d (расстояние в направлении полета) и разность высот Δh (превышение, принижение). Эти параметры используются при управлении полетом ЛА в группе, и целью управления является выдерживание их значений в заданных пределах [12].
В литературе отсутствует общепринятое однозначное определение величин дистанции и интервала. Приведем два варианта такого определения.
Первое определение основано на кинематической схеме (Фиг. 5), использующей прямоугольную горизонтальную местную систему координат ЛАi, центр О которой расположен в центре масс ЛАi, ось Oxi направлена на Север, ось Oyi расположена по вертикали, ось Ozi дополняет систему координат до правой. В этой системе координат местоположение ЛАj с номером j проецируется на горизонтальную плоскость, вектор  расстояния между ЛАi и ЛАj проецируется соответственно в
расстояния между ЛАi и ЛАj проецируется соответственно в  Вектор путевой скорости
Вектор путевой скорости  ЛАi лежащий, по определению [14], в горизонтальной плоскости, продолжается за пределы ЛАi, линейная дистанция d определяется как проекция
ЛАi лежащий, по определению [14], в горизонтальной плоскости, продолжается за пределы ЛАi, линейная дистанция d определяется как проекция  на это продолжение, линейный интервал b определяется как проекция
на это продолжение, линейный интервал b определяется как проекция  на перпендикуляр к продолжению вектора
на перпендикуляр к продолжению вектора  [13].
[13].
Угол между осью Oxi и вектором  по определению является путевым углом ЛАi, равным ПУi=Ψi+УС, где Ψi - угол курса ЛАi, УС - угол сноса.
по определению является путевым углом ЛАi, равным ПУi=Ψi+УС, где Ψi - угол курса ЛАi, УС - угол сноса.
Пусть Δxij, Δyij, Δzij - координаты ЛАj в горизонтальной местной прямоугольной системе координат ЛАi. Поворот системы координат (xi, yi, zi) вокруг оси Oyi характеризуется матрицей направляющих косинусов, равной [15]
где ПУi=Ψi+УС,
Ψi - угол курса ЛАi,
УС - угол сноса.
Откуда в системе координат, связанной с путевой скоростью

где Δxij, Δyij, Δzij - координаты ЛАj
Второй вариант определения линейной дистанции и линейного интервала основаны на кинематической схеме двух ЛА (Фиг. 6), в которой используется связанная система координат ЛАi. Начало системы О находится в центре масс ЛАi, ось Oyi св лежит в плоскости симметрии ЛАi и направлена вверх (от пола кабины к фонарю), ось Oxi св параллельна оси фюзеляжа (или хорде крыла, или главной продольной оси инерции) и лежит в плоскости симметрии ЛАi, ось Ozi св дополняет систему до правой [14].
Пусть в связанной системе координат ЛАi координаты ЛАj равны хiсв j, yiсв j, ziсв j. Линейная дистанция, линейный интервал и разность высот могут быть определены следующим образом:

Бортовое оборудование ЛА не позволяет определить эти параметры непосредственным измерением. Их можно вычислить, зная абсолютные координаты ЛА и угловые параметры.
В качестве источника информации об абсолютных координатах ЛА в системе МСН рассмотрим приемоизмеритель ГЛОНАСС, способный выдавать данные (абсолютные координаты) в двух системах координат:
- геодезическая система координат (ГСК) ПЗ-90: В (геодезическая широта); L (геодезическая долгота); Н (высота) и составляющие вектора скорости - νN (северная), νE (восточная), νH (вертикальная);
- декартова геоцентрическая система координат OXYZ, центр которой совмещен с центром масс Земли, ось OY направлена по оси вращения Земли в сторону Северного полюса, ось OZ лежит в плоскости земного экватора и связана с Гринвичским меридианом, ось ОХ дополняет систему координат до правой.
Непосредственно пересчитать абсолютные координаты двух ЛА в требуемые относительные координаты весьма затруднительно. Поэтому используется последовательный пересчет:
1. Преобразование геодезических координат в геоцентрические (ГЦСК):
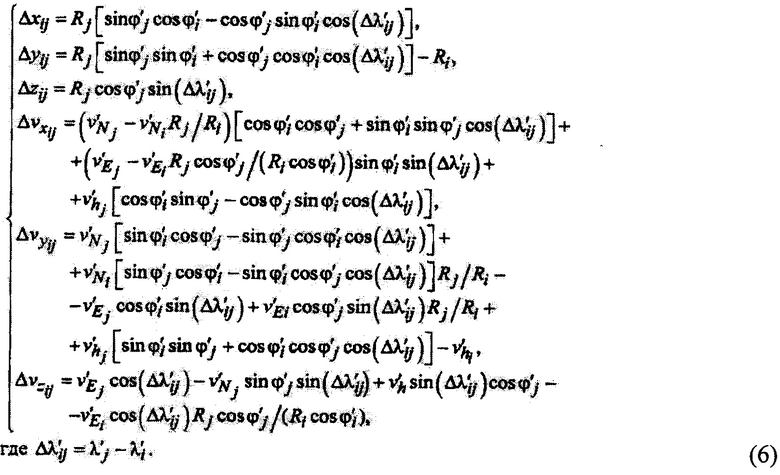
2. Преобразование геоцентрических координат ЛАi и ЛАj в относительные координаты в горизонтальной местной прямоугольной системе координат каждого из ЛАi и ЛАj:
Радиус в точке расположения ЛАi:

В формуле (7) а=6378245 м - большая полуось земного эллипсоида, е2=0,0066934 - эксцентриситет земного эллипсоида.
При малых изменениях абсолютных координат выражения (6) можно упростить:

3. Интервал, дистанция и разность высот на каждом из ЛАi, ЛАj относительно другого ЛА определяются выражениями (1)-(3).
Таким образом, в неавтономном режиме для вычисления на ЛАi линейной дистанции, линейного интервала и разности высот между ЛАi и ЛАj последний должен передавать по каналу информационного обмена на ЛАi:
при первом определении d, b, Δh - свои геоцентрические координаты ϕi, λi, hi и истинный путевой угол ПУi;
при втором определении d, b, Δh - свои геоцентрические координаты ϕi, λi, hi.
Для реализации автономного режима при полном отсутствии сигналов СРНС осуществляется автономная синхронизация циклограммы работы системы (Фиг. 6). Для этого всем ЛА до работы в группе из М ЛА присваиваются номера слотов i=1, …, М (они же - номера ЛА). Ведущему ЛА присваивается номер 1. Номерам i соответствуют конкретные сигналы из ансамбля сигналов автономной синхронизации Si(t) со слабой взаимной корреляцией. Слабая взаимная корреляция необходима для выделения конкретным ЛА «своего» сигнала с большими вероятностями правильного обнаружения и различения.
Если из строя выходит СРНС, о чем все ЛА должны уведомляться по другим каналам связи, то начинается процедура автономной синхронизации циклограммы системы, описанная выше.
В конце кадра синхронизации у ведущего ЛА1 будут оценки дальностей  , где i=2, …, М. У ЛАi будет оценка дальности
, где i=2, …, М. У ЛАi будет оценка дальности  .
.
Синхронизацию можно повторять через несколько кадров. Период повторения определяется нестабильностью опорных генераторов на ЛА, используемых для создания циклограмм.
В кадре информационного обмена, который следует за кадром синхронизации, каждый ЛАi (i=1,...,М) в своем i-м слоте передает в вещательном режиме («всем») пакет, состоящий из сигнала символьной синхронизации CCi и информационного сигнала ИСi. Остальные ЛА принимают информационные пакеты. В каждом пакете передаются, прежде всего, векторы оценок дальностей и скоростей. После кадра информационного обмена на всех ЛА будет матрица оценок дальностей  размером МхМ (i, j=1, …, М) и матрица оценок скоростей.
размером МхМ (i, j=1, …, М) и матрица оценок скоростей.
На ЛА могут быть созданы фильтры слежения для оценок радиальных дальностей  .
.
Измерение относительных дальностей и скоростей их изменения совмещается с информационным обменом. Реализуется циклограмма с кадром синхронизации и кадром информационного обмена, которые изменяется следующим образом.
В слоте i ЛАi посылает сигнал символьной синхронизации (CCi), который воспринимается другим ЛАj как запрос дальности. В этом же слоте ЛАi передает информационный сигнал (ИСi) со значением момента времени по своей шкале, в который передается сигнал символьной синхронизации. Все другие ЛА принимают CCi, ИСi и фиксируют моменты приема CCi. По ним вычисляются оценки всех задержек  .
.
Алгоритм формирования оценок  на примере взаимодействия двух ЛА приведен ниже.
на примере взаимодействия двух ЛА приведен ниже.
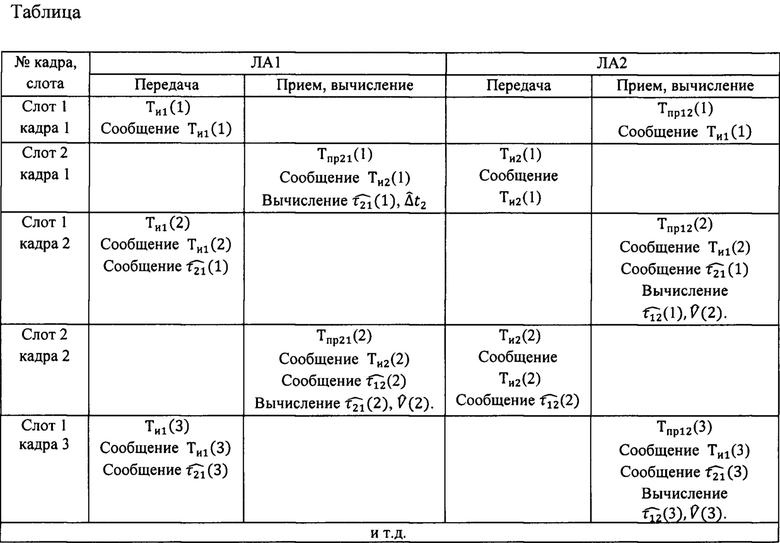
Кадр информационного обмена состоит из двух слотов 1 и 2.
ЛА1 излучает в слоте 1 кадра 1 сигнал CC1 в момент Ти1 своей шкалы времени. Это число ЛА1 передает в этом слоте в информационном сообщении ИС1.
На ЛА2 принимают сигнал CC1 в слоте 1 кадра 1 в момент Тпр12=Ти1+Δt2+τ12, где Δt2 - сдвиг шкалы ЛА2 относительно шкалы ЛА1, τ12 - задержка распространения сигнала от ЛА1 до ЛА2. Число Ти1 принимается в сообщении ИС1.
ЛА2 излучает в слоте 2 кадра 1 сигнал СС2 в момент Ти2=Ти1+Тсл+Δt2, где Тсл - длительность слота. Это число ЛА2 передает в информационном сообщении ИС2.
На ЛА1 принимают сигнал СС2 в слоте 2 кадра 1 в момент Тпр21=Ти1+Тсл+τ21, где τ21 - задержка распространения от ЛА2 до ЛА1.
В итоге на ЛА1 получаем систему уравнений с двумя неизвестными τ21 и Δt2:
Ти2=Ти1+Тсл+Δt2,
Тпр21=Ти1+Тсл+τ21,
решение которой имеет вид:


Отсюда видно, что получена оценка  с экстраполяцией назад на Тсл на момент излучения первым ЛА и оценка сдвига шкалы ЛА2 относительно шкалы ЛА1.
с экстраполяцией назад на Тсл на момент излучения первым ЛА и оценка сдвига шкалы ЛА2 относительно шкалы ЛА1.
На ЛА2 получаем систему уравнений с двумя неизвестными τ12 и Δt2:
Ти2=Ти1+Тсл+Δt2,
Тпр12=Ти1+Тсл+τ12,
решение которой имеет вид:


Поскольку Ти2 - Тсл=Ти1+Δt2, имеем  Отсюда видно, что полученная оценка
Отсюда видно, что полученная оценка  относится к моменту излучения первым ЛА с учетом смещения шкал.
относится к моменту излучения первым ЛА с учетом смещения шкал.
Далее в слоте 1 кадра 2 ЛА1 передает на ЛА2 сообщение с оценкой  На ЛА2 принимают это сообщение и вычисляют оценку скорости с задержкой на слот относительно оценки дальности ЛА2:
На ЛА2 принимают это сообщение и вычисляют оценку скорости с задержкой на слот относительно оценки дальности ЛА2:
В слоте 2 кадра 2 ЛА2 передает на ЛА1 оценку  . На ЛА1 вычисляется та же оценка
. На ЛА1 вычисляется та же оценка  . Далее процесс повторяется.
. Далее процесс повторяется.
Описанный процесс представим для наглядности в виде таблицы.
Далее на всех ЛА вычисляются оценки дальностей: 
Процесс повторяется в следующих кадрах.
Описанная методика распространяется на М ЛА.
Достоинства данного метода измерения радиальных дальностей:
1) можно реже проводить синхронизацию, т.к. за один кадр все ЛА вычисляют оценки дальности  с компенсацией всех временных сдвигов шкал за время кадра;
с компенсацией всех временных сдвигов шкал за время кадра;
2) не нужен кадр измерения дальностей методом «запрос - ответ»;
3) отсутствуют внутрисистемные помехи, свойственные методу «запрос - ответ», т.е. ансамбль слабо коррелированных сигналов нужен только для автономной синхронизации и информационного обмена;
4) слежение за оценками дальностей  на всех ЛА можно организовать с постоянным периодом Тк.
на всех ЛА можно организовать с постоянным периодом Тк.
Рассмотрим вычисление линейной дистанции d, линейного интервала b и разности высот Δh в автономном режиме.
Для кинематической схемы Фиг. 6 из геометрических построений в местной горизонтальной системе координат ЛАi следует, что при измерении горизонтальной дальности rs между ЛАi и ЛАj
d=rг cos ε;
b=rг sin ε,
где ε=Ψi-Ψj+КУi+УС;
Ψi - истинный курс ЛАi;
Ψj - истинный курс ЛАj;
КУi - курсовой угол ЛАi, измеренный на ЛАj;
УС - угол сноса, одинаковый для ЛАi и ЛАj.
Если ЛАi передает на ЛАj оценку своей высоты  , то измеряя наклонную дальность
, то измеряя наклонную дальность  , на ЛАj оценка горизонтальной дальности будет равна
, на ЛАj оценка горизонтальной дальности будет равна
где  .
.
В кинематической схеме Фиг. 6 в связанной системе координат обозначим угол между осью Oxi св и вектором r через ε. Этот угол не может быть определен на основе измерения дальности r, и поэтому следует привлечь другие навигационные средства либо размещать на ЛАj пеленгатор. Одним из возможных решений является измерение на ЛАi курсового угла КУj на ЛАj и передача оценки этого угла по линии информационного обмена на ЛАj. Измерение курсового угла КУj можно осуществить, например, с помощью бортовой РЛС ЛАi.
Таким образом, в автономном режиме в кадре информационного обмена ЛАi кроме сигналов для измерения дальности должны передаваться на ЛАj при первом определении d, b, Δh:
- истинный курс ЛАi;
- высота  ;
;
При втором определении d, b, Δh на ЛАi должен измеряться курсовой угол на ЛАj.
Оценки дистанции и интервала, как в неавтономном, так и в автономном режиме могут быть использованы для пилотирования ЛА группы. Один из алгоритмов управления ЛА на основе данных о дистанции и интервале до другого ЛА описан в [12].
Рассмотрим реализацию комплексной обработки информации об относительном положении ЛА. С точки зрения обеспечения безопасности группового полета определяющим является контроль расстояния между взаимодействующими ЛА, поэтому совместно с данными об относительных координатах, получаемыми по измеренным абсолютным координатам от СРНС, необходимо использовать данные непосредственных измерений относительных дальностей до всех ЛА, взаимодействующих с данным ЛА.
Однако относительные координаты взаимодействующих ЛА и относительные дальности измеряются не одновременно, а в соответствии с циклограммами приемника СРНС и информационного обмена между ЛА. Кроме того, объем получаемой каждым ЛА информации даже в небольшой группе будет значительным. Например, в группе из 6 ЛА один абонент получает 15 абсолютных координат, 15 составляющих вектора скорости и 5 относительных дальностей. Таким образом, каждый абонент за один цикл работы системы получает 35 измеренных параметров. Отсюда следует, что совместная обработка всей получаемой информации будет очень трудоемкой.
В связи с этим рекомендуются упрощенные алгоритмы оценивания относительных координат [8], которые заключаются в раздельной фильтрации координатной и дальномерной информации. Структура одного из таких алгоритмов комплексной обработки информации показана на Фиг. 8.
Рассмотрим работу предлагаемой системы определения относительного положения ЛА, реализующей предлагаемый способ, в соответствии с Фиг. 2.
Описание системы
Режим работы задается из ПНК прежде всего настройкой бортового оборудования всех ЛА на одну и ту же частоту из рабочих частот системы МСН (ПНК на Фиг. 2 не показан).
Кроме рабочей частоты задается номер ЛА (слота передачи) и признак работоспособности СРНС, определяющий режим работы - «Неавтономный» либо «Автономный». Номер слота поступает на вход формирователей сигналов синхронизации 27, 41 (на Фиг. 2 не показано). Признак работоспособности СРНС поступает на входы формирователей сигналов синхронизации 27, 41 и устройств комплексной обработки информации об относительном положении ЛА 30, 44. Далее бортовое оборудование всех ЛА работает автоматически без вмешательства ПНК.
В неавтономном режиме бортовое оборудование всех ЛА работает одинаково. Метка времени приемников СРНС 22, 36 на каждом ЛА синхронизирует формирователь сигналов синхронизации, который формирует слоты информационного обмена циклограммы системы МСН. Приемники СРНС 22, 36 измеряют координаты и навигационные параметры своих ЛА, передают их в устройства информационного обмена 28, 42 и устройства комплексной обработки информации об относительном положении ЛА 30, 44.
Каждый ЛА в выделенном для него слоте передачи передает через приемопередающие устройства линии передачи данных 24, 38 остальным ЛА в вещательном режиме пакет данных, содержащий навигационную информацию от собственного приемника СРНС 22, 36 и от пилотажно-навигационного комплекса (ПНК). Кроме того, передается информация о времени излучения сигнала символьной синхронизации информационного сообщения для обеспечения измерения дальности. Принятое информационное сообщение на каждом из остальных ЛА поступает из устройств информационного обмена 28, 42 на входы измерителей относительных дальностей 34, 47 и вычислителей относительных координат ЛА 29, 43. В вычислителях относительных координат ЛА 29, 43 определяются относительные координаты ЛА, поступающие далее в устройства комплексной обработки информации об относительном положении ЛА 30, 44 для координатной фильтрации. Информация о дальностях из измерителей относительных дальностей 34, 47 поступает в устройства комплексной обработки информации об относительном положении ЛА 30, 44 для дальномерной фильтрации.
В остальных слотах ЛА принимают пакеты данных от остальных ЛА через приемопередающие устройства линии передачи данных 24, 38. По данным ПНК и данным, полученным от других ЛА, в вычислителях относительных координат ЛА 29, 43 производится вычисление относительных координат, и далее в устройствах комплексной обработки информации об относительном положении ЛА 30, 44 производится комплексная обработка информации с пересчетом координат, например в относительные дальности, интервалы и разности высот ЛА.
В автономном режиме в бортовом оборудовании ведущего ЛА формирователь сигналов синхронизации 27 запускает поочередно в последовательных слотах формирователь запросов синхронизации 33. Модулированный запрос синхронизации ЗСi для i-го ЛА поступает через схему "ИЛИ" 32 на вход приемопередающего устройства линии передачи данных 5 и посылается в эфир (Фиг. 7).
Принятый приемной антенной линии передачи данных 39 бортового оборудования i-го соседнего ЛА модулированный запрос синхронизации ЗСi через приемопередающее устройство линии передачи данных 38 поступает в демодулятор запроса синхронизации 45 этого бортового оборудования, где фиксируется момент прихода демодулированного ЗСi. Демодулированный ЗСi поступает далее на вход формирователя ответа синхронизации 46, с выхода которого после фиксированной задержки модулированный ответ синхронизации OCi поступает через схему "ИЛИ" 48 в приемопередающее устройство линии передачи данных 38 бортового оборудования i-го ЛА и излучается через передающую антенну 40 в эфир.
Приемопередающее устройство линии передачи данных 24 ведущего ЛА принимает модулированный ответ синхронизации OCi. С выхода этого приемопередающего устройства станции сигнал OCi поступает в демодулятор ответов синхронизации 31 и далее в измеритель задержки распространения 35, который измеряет интервал времени между немодулированным сигналом ЗСi и демодулированным сигналом OCi, формирует информационную посылку (ИПi) со значением этого интервала, которая поступает на вход приемопередающего устройства линии передачи данных 24 и излучается в эфир.
Приемопередающее устройство линии передачи данных 38 i-го ЛА принимает информационную посылку ИПi ведущего ЛА, которая поступает на вход демодулятора и декодера данных о задержке в составе устройства информационного обмена 42. В упомянутом устройстве из момента прихода демодулированного ЗСi вычитается значение интервала времени задержки и результат поступает на вход формирователя сигналов синхронизации 41 для формирования начала циклограммы i-го ЛА.
Формирователь сигналов синхронизации 41 в кадре информационного обмена формирует слоты, поступающие на вход устройства информационного обмена 42, в которых осуществляется информационный обмен i-го ЛА аналогично работе в неавтономном режиме. Отличие заключается в составе принимаемой и передаваемой информации, поскольку приемник СРНС не работает.
Информационное сообщение поступает из устройства информационного обмена 23 на вход измерителя относительных дальностей 47. Информация о дальностях из измерителя относительных дальностей 47 поступает в устройство комплексной обработки информации об относительном положении ЛА 44 для дальномерной фильтрации. При этом признак работоспособности СРНС отключает координатные фильтры.
Приведем примеры реализации устройств, входящих в систему Фиг. 2.
В качестве приемника СРНС 22, 36 может быть использован любой из авиационных приемников СРНС, примеры которых приведены, например, в [16, стр. 173, таблица 13.3; стр. 310-319, табл. П.4.1]. Тип антенны СРНС 23, 37 зависит от типа ЛА.
В современных линиях передачи данных используются широкополосные сигналы и цифровая обработка сигналов. Примеры приемопередатчиков для широкополосных сигналов приведены, например, в [17]. На фиг. 9 приведена блок-схема супергетеродинного дуплексного приемопередатчика [17, стр. 116, рис. 3.1], на фиг. 10 приведена блок-схема приемопередатчика прямого преобразования [17, стр. 144, рис. 3.10]. В упомянутых блок-схемах использована одна антенна для приема и передачи с дуплексером. При отсутствии дуплексера используются две антенны, как в предлагаемой системе. Тип антенны линии передачи данных зависит от диапазона радиочастот и типа ЛА. Примеры антенн линии передачи данных приведены, например, в [18].
На Фиг. 11 и 12 приведена структурная схема формирователя сигналов синхронизации 27 и временные диаграммы его работы.
На Фиг. 13 и 14 приведена структурная схема формирователя сигналов синхронизации 41 и временные диаграммы его работы.
На Фиг. 15 и 16 приведены структурные схемы соответственно устройства информационного обмена 28 и 42. при использовании широкополосных сигналов модуляторы и демодуляторы в этих схемах реализуются, например, по схемам Фиг. 19 и 20.
Фиг. 17 поясняет работу устройства информационного обмена 28 при приеме в информационном кадре и формировании сигналов для измерения относительной дальности.
На Фиг. 18 приведена структурная схема формирователя запросов синхронизации 33.
Примеры реализации модуляторов и демодуляторов в формирователе запросов синхронизации 33, формирователе ответов синхронизации 46, устройствах информационного обмена 28 и 42, демодуляторе ответов синхронизации 31 и демодуляторе запросов синхронизации 45 приведены на Фиг. 19 и 20.
Структурная схема измерителя задержки распространения 35 приведена на Фиг. 21. Кодирующее устройство, входящее в этот измеритель, может быть реализовано различными способами: с использованием дискретной линии задержки [21, стр. 71, рис. 11], на сдвиговом регистре [21, стр. 72, рис. 12], на счетчике с матрицей [21, стр. 73, рис. 12].
Для передачи информации о задержке распространения принимается временной способ кодирования ("время-импульсная модуляция"), при котором значение информации передается в виде интервала времени между кодами "Старт" и "Стоп". Число дискретных значений информационного интервала составляет N=2z, где z число двоичных разрядов передаваемой информации.
На Фиг. 22 представлена структура сигнала при временном способе кодирования [22, стр. 37, рис. 1]. Весь сигнал содержит К подциклов, причем последний подцикл является проверочным: при произвольных xi (i=1, 2,…, K-1) всегда выбирается такое xk, чтобы  (mod N), что дает возможность на приемном конце обнаруживать и исправлять одиночную ошибку, возникшую в одном из информационных подциклов. При этом "Старт" передается только в первом подцикле.
(mod N), что дает возможность на приемном конце обнаруживать и исправлять одиночную ошибку, возникшую в одном из информационных подциклов. При этом "Старт" передается только в первом подцикле.
В качестве вычислителей относительных координат 29, 43 и устройств комплексной обработки информации об относительном положении ЛА 30, 44 могут быть использованы любые бортовые авиационные вычислительные устройства.
Таким образом, в предложенных способе и системе введены новые операции и новые их сочетания с известными операциями, связанные с синхронизацией приема и передачи информации между ЛА и определения относительного положения каждого ЛА группы как при работе СРНС, так и при возможной потере работоспособности СРНС.
При этом существенно, что введение в систему межсамолетной навигации способа автономной синхронизации ее работы повышает надежность и живучесть системы межсамолетной навигации.
Указанные операции определяют существенную новизну предложенного способа.
Эффективность предложенных способа и системы подтверждены результатами имитационного цифрового и полунатурного моделирования при разработке и отладке опытных образцов бортового оборудования навигации, посадки и межсамолетной навигации перспективных ЛА.
Заявляемое изобретение является перспективным для решения проблем повышения надежности и живучести перспективных систем межсамолетной навигации, в том числе при решении боевых задач в условиях уничтожения спутников СРНС или постановки помех в районах групповых действий авиации.
Таким образом, из вышеприведенного следует новизна и полезность предложенных способа и системы.
Литература
1 Информационная система межсамолетной навигации: пат. №2222781, Рос. Федерация. №2002101344/28; заявл. 10.01.00; опубл. 27.01.2004.
2 Method and system for automatic control of the flight formation of unmanned aerial vehicles: UK Patent GB №2476149; Date of Publication 16.07.2014.
3 Autonomous station keeping system for formation flight: Patent Application Publication №US 2005/0055143; Pub. Data: Mar. 10, 2005.
4 Automatic formation flight control system (AFFCS) - a system for automatic formation flight control of vehicles not limited to aircraft, helicopters, or space platforms: United States Patent. №US 6,926,23; Date of Patent: Aug. 9, 2005.
5 Дальномерная радиотехническая система ближней навигации летательных аппаратов: пат. №2478979: Рос. Федерация. №2002101344/28; заявл. 11.11.2011; опубл. 10.04.2013.
6 Navstar GPS Space Segment/Navigation User interfaces, ICD-GPS-200C // ARINC Research Corporation, 10 October 1993. Режим доступа http://www.arinc.com/gps.
7 Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
8 Орлов В.К., Герчиков А.Г., Чернявский А.Г. Локальные радиотехнические системы межсамолетной навигации: СПб., Изд. СПбГЭТУ «ЛЭТИ», 2011. 123 с.
9 Apparatus and method for generating low latency position information from position signals transmitted in a narrow bandwidth: заявка на пат.США 2013/0069815; опубл. 21.03.2013.
10 Apparatus and method for generating low latency position information from position signals transmitted in a narrow bandwidth channel of a radio frequency: пат.8692705 США. №2013/ 0069815; заявл. 21.03.13; опубл. 08.04.2014.
11 Способ определения относительного положения при межсамолетной навигации: пат. №2624994, Российская Федерация. №2016124078; заявл. 16.06.2016; опубл. 11.07.2017.
12 Тарасов В.Г. Межсамолетная навигация. М.: Машиностроение, 1980. - 184 с.
13 Руководство по воздушной навигации авиации вооруженных сил Российской Федерации. М.: Военное изд-во, 1994. - 149 с.
14 Справочник летчика и штурмана // Под ред. В.М. Лавского. - М: Военное изд-во Министерства обороны СССР, 1974. - 504 с.
15 Rogers R.M. Applied Mathematics in Integrated Navigation Systems//Third Edition. -AIAA, 2007. - 409 p.
16 Соловьев Ю.А. Спутниковая навигация и ее приложения. М.:ЭКО-ТРЕНДЗ, 2003. 326 с.
17 Gu О. RF system design of transceivers for wireless communications, Springer Science + Business Media, Inc., 2005.
18 Никольский Б.А. Бортовые радиоэлектронные системы, Самара, 2013. - 417 с.
19 Middlestead R.W. Digital communications with emphasis on data modems. Theory, analysis, design, simulation, testing and applications. John Wiley & Sons, Inc., N.J., 2017. - 792p.
20 Скляр Б. Цифровая связь. Теоретические основы и практическое применение. Изд. 2-е, испр: Пер. с англ. - М.: Издательский дом "Вильямс", 2003. - 1104 с.
21 Глобус И.А. Двоичное кодирование в асинхронных системах связи. - М.: Связь, 1972. - 108 с.
22 Куклев Л.П., Семенович Д.И. Помехоустойчивость временного способа передачи информации // Вопросы радиоэлектроники. Сер. ОТ, 1976, вып. 12, с. 36-45.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСТОТЫ И ШКАЛЫ ВРЕМЕНИ УДАЛЕННЫХ ПУНКТОВ | 2015 |
|
RU2585325C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СИСТЕМА ФОРМИРОВАНИЯ ВРЕМЕННЫХ ПОПРАВОК ПО СИГНАЛАМ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ К ШКАЛАМ ВРЕМЕНИ ПРОСТРАНСТВЕННО РАЗНЕСЕННЫХ ПУНКТОВ | 1997 |
|
RU2133489C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2016 |
|
RU2624994C1 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2487418C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ | 1990 |
|
RU1753837C |
Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для обеспечения безопасности полета группы ЛА, выполняющих совместные действия в сложных навигационных условиях, в том числе, при выходе из строя спутниковой радионавигационной системы (СРНС). Для этого при работающей СРНС предусматривается определение навигационной информации каждым ЛА, передача и прием ее через каналы информационного обмена ЛА путем формирования по информации СРНС сигналов синхронизации для временного разделения передачи и приема навигационной информации, а при неработающей СРНС - автономная синхронизация временного разделения передачи и приема навигационной информации в группе ЛА с последующими передачей и приемом сигналов для определения относительных дальностей между ЛА. Технический результат - повышение надежности формирования сигналов синхронизации при определении относительного положения ЛА. 2 н. и 4 з.п. ф-лы, 22 ил.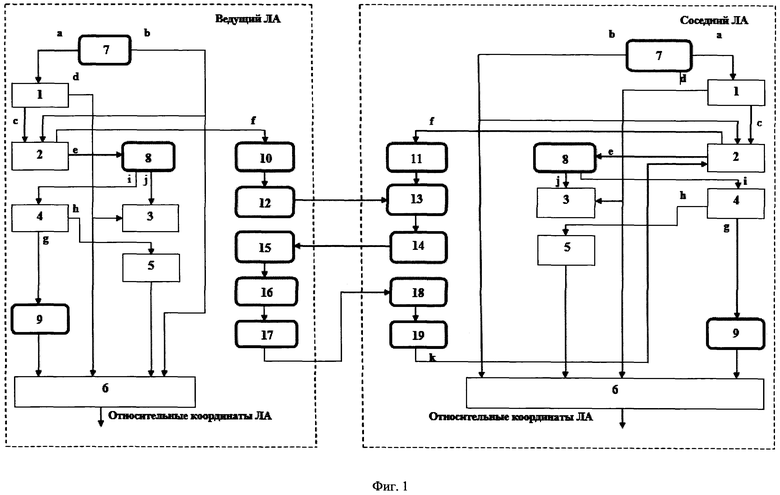
1. Способ определения относительного положения группы летательных аппаратов (ЛА), состоящей из ведущего ЛА и соседних ЛА, предусматривающий для каждого ЛА группы определение относительного положения всех других ЛА по отношению к данному ЛА первым и вторым способами, комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами, при этом первый способ предусматривает определение навигационной информации каждого ЛА по спутникам спутниковой радионавигационной системы (СРНС), передачу упомянутой информации всем другим ЛА и прием навигационной информации всех других ЛА через канал информационного обмена путем формирования сигналов синхронизации для временного разделения передачи и приема навигационной информации, а второй способ предусматривает для каждого ЛА определение относительных дальностей всех других ЛА, отличающийся тем, что определение относительных дальностей ЛА производится путем передачи и приема навигационной информации через канал информационного обмена с временным разделением, первый и второй способы используются совместно при наличии признака «СРНС работоспособна», а при наличии признака «СРНС неработоспособна» используется только второй способ, при этом при наличии признака «СРНС работоспособна» на каждом ЛА сигналы синхронизации формируют на основе определения навигационной информации ЛА по спутникам СРНС, из сигналов синхронизации формируют кадр информационного обмена, передают в упомянутом кадре навигационную информацию СРНС и пилотажно-навигационного комплекса (ПНК) всем другим ЛА и принимают навигационную информацию СРНС и ПНК от всех других ЛА через канал информационного обмена с временным разделением, определяют на основе принятой навигационной информации СРНС и ПНК относительные дальности до всех других ЛА и вычисляют относительные координаты ЛА, а при наличии признака «СРНС неработоспособна» на ведущем ЛА сигналы синхронизации ведущего ЛА формируют автономно, из упомянутых сигналов формируют кадр синхронизации ведущего ЛА, на каждом соседнем ЛА сигналы синхронизации формируют автономно, из упомянутых сигналов синхронизации формируют кадр синхронизации соседнего ЛА, последовательно в кадре синхронизации ведущего ЛА передают запросы синхронизации от ведущего ЛА каждому соседнему ЛА, совпадающие с сигналами синхронизации ведущего ЛА, в кадре синхронизации каждого соседнего ЛА принимают запросы синхронизации ведущего ЛА этому соседнему ЛА и передают ответы синхронизации ведущему ЛА, в кадре синхронизации ведущего ЛА принимают ответы синхронизации от каждого соседнего ЛА, измеряют задержку распространения до каждого соседнего ЛА, передают данные о задержке распространения каждому соседнему ЛА, в кадре синхронизации каждого соседнего ЛА принимают данные о задержке распространения от ведущего ЛА, корректируют временное положение сигналов синхронизации каждого соседнего ЛА, затем из сигналов синхронизации ведущего ЛА формируют на ведущем ЛА кадр информационного обмена со всеми другими ЛА, из корректированных сигналов синхронизации каждого соседнего ЛА формируют на каждом соседнем ЛА кадр информационного обмена со всеми другими ЛА, в упомянутых кадрах передают навигационную информацию ПНК всем другим ЛА и принимают навигационную информацию ПНК от всех других ЛА через канал информационного обмена с временным разделением, определяют на основе принятой навигационной информации ПНК относительные дальности до всех других ЛА и вычисляют относительные координаты ЛА, причем комплексную обработку информации об относительном положении ЛА на всех ЛА производят только на основе вычисленных относительных дальностей.
2. Способ по п. 1, отличающийся тем, что в качестве ведущего служит ЛА, который в режиме встречи с ЛА - танкером для дозаправки топливом определяет свое положение относительно танкера и обменивается с ним информацией об относительном положении.
3. Способ по п. 1, отличающийся тем, что в качестве ведущего служит ЛА, осуществляющий заход на посадку по данным, которыми он обменивается с наземными одной или несколькими локальными контрольно-корректирующими станциями СРНС с известными координатами, оборудованными аналогично соседним ЛА способа п. 1, при этом при работоспособности СРНС заходящий на посадку ЛА вычисляет курсовые и глиссадные отклонения от траектории посадки по данным СРНС, а в случае неработоспособности СРНС - на основе измерения своего положения относительно локальных контрольно-корректирующих станций.
4. Способ по пп. 1-3, отличающийся тем, что каждый ЛА для определения относительных дальностей в кадре информационного обмена передает информационную посылку, фиксирует момент передачи и в той же информационной посылке передает значение момента передачи, а все другие ЛА принимают упомянутую информационную посылку, фиксируют моменты приема упомянутой посылки, вычисляют задержки распространения и смещения временных шкал приема относительно временной шкалы передачи посылки и вычисляют относительную дальность до ЛА, передавшего информационную посылку.
5. Способ по пп. 1-4, отличающийся тем, что предлагается вариант способа, в котором сигнал символьной синхронизации информационной посылки в кадре информационного обмена идентичен сигналу синхронизации.
6. Система, реализующая способ по любому из пп. 1-5, состоит из бортового оборудования ведущего ЛА и бортового оборудования каждого из соседних ЛА, каждое из которых содержит приемник СРНС, соединенный с приемной антенной СРНС, приемопередающее устройство линии передачи данных, соединенное с приемной и передающей антеннами линии передачи данных, формирователь сигналов синхронизации, устройство информационного обмена, вычислитель относительных координат ЛА и устройство комплексной обработки информации об относительном положении ЛА, при этом дополнительно введены в бортовое оборудование ведущего ЛА последовательно соединенные формирователь запросов синхронизации, измеритель задержки распространения и схема «ИЛИ» ведущего ЛА, а также измеритель относительных дальностей и демодулятор ответов синхронизации, а в бортовое оборудование каждого из соседних ЛА введены последовательно соединенные демодулятор запроса синхронизации и данных о задержке, формирователь ответа синхронизации и схема «ИЛИ» соседнего ЛА, а также измеритель относительных дальностей, при этом в бортовом оборудовании ведущего ЛА на первый вход формирователя сигналов синхронизации и первый вход устройства комплексной обработки информации об относительном положении ЛА подается признак работоспособности СРНС, на второй вход формирователя сигналов синхронизации и первый вход устройства информационного обмена подается номер «своего» ЛА, третий вход формирователя сигналов синхронизации соединен с первым выходом приемника СРНС, второй выход которого соединен со вторым входом устройства информационного обмена, первым входом вычислителя относительных координат и со вторым входом устройства комплексной обработки информации об относительном положении ЛА, первый, второй и третий выходы упомянутого формирователя сигналов синхронизации соединены соответственно с входом формирователя запросов синхронизации, с третьим и четвертым входами устройства информационного обмена, на пятый вход которого подается информация ПНК, шестой вход которого соединен с выходом приемопередающего устройства линии передачи данных и входом демодулятора ответов синхронизации, выход которого соединен со вторым входом измерителя задержки распространения, первый, второй, третий и четвертый выходы упомянутого устройства информационного обмена соединены соответственно со вторым входом схемы «ИЛИ» ведущего ЛА, вторым входом вычислителя относительных координат, первым и вторым входами измерителя относительных дальностей, выход которого соединен с третьим входом вычислителя относительных координат, первый и второй выходы которого соединены соответственно с третьим и четвертым входами устройства комплексной обработки информации об относительном положении ЛА, выход которого является выходом относительного положения бортового оборудования ведущего ЛА, а второй выход упомянутого формирователя запросов синхронизации соединен с третьим входом схемы «ИЛИ» ведущего ЛА, выход которой соединен с входом приемопередающего устройства линии передачи данных, а в бортовом оборудовании каждого из соседних ЛА на первый вход формирователя сигналов синхронизации и первый вход устройства комплексной обработки информации об относительном положении ЛА подается признак работоспособности СРНС, на второй вход формирователя сигналов синхронизации и первый вход устройства информационного обмена подается номер «своего» ЛА, третий вход формирователя сигналов синхронизации соединен с первым выходом приемника СРНС, второй выход которого соединен со вторым входом устройства информационного обмена, первым входом вычислителя относительных координат и со вторым входом устройства комплексной обработки информации об относительном положении ЛА, первый и второй выходы упомянутого формирователя сигналов синхронизации соединены соответственно с третьим и четвертым входами устройства информационного обмена, на пятый вход которого подается информация ПНК, шестой вход которого соединен с выходом приемопередающего устройства линии передачи данных и с входом демодулятора запроса синхронизации и данных о задержке, первый, второй, третий, четвертый и пятый выходы упомянутого устройства информационного обмена соединены соответственно со вторым входом схемы «ИЛИ» соседнего ЛА, вторым входом вычислителя относительных координат, четвертым входом формирователя сигналов синхронизации, первым и вторым входами измерителя относительных дальностей, выход которого соединен с третьим входом вычислителя относительных координат ЛА, первый и второй выходы которого соединены соответственно с третьим и четвертым входами устройства комплексной обработки информации об относительном положении ЛА, выход которого является выходом относительного положения бортового оборудования соседнего ЛА, а выход схемы «ИЛИ» соседнего ЛА соединен с входом приемопередающего устройства линии передачи данных.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2016 |
|
RU2624994C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| Прибор для отбора пробы жидкости | 1930 |
|
SU24990A1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| DE 69721085 T2, 22.04.2004. | |||

