Изобретение относится к области управления подвижными объектами, в частности к области стабилизации судна.
Известна система стабилизации курса судна [1], содержащая датчики положения судна, суммирующий усилитель и исполнительное устройство. Стабилизация судна осуществляется исполнительным устройством - кормовыми рулями, которые создают управляющее воздействие, пропорциональное отклонению судна от заданного направления.
Известна система стабилизации судна, содержащая блок логики, датчик рассогласования по глубине, датчик угла дифферента, датчик угла крена, который через первый усилитель соединен с входом первого исполнительного устройства, выход которого подключен к второму входу первого усилителя, выход датчика рассогласования по глубине соединен через второй усилитель с входом второго исполнительного устройства, выход которого подключен к второму входу второго усилителя, датчик угла дифферента через третий усилитель с входом третьего исполнительного устройства, выход которого подключен к второму входу третьего усилителя [2] - прототип.
Недостатком прототипа является невозможность обеспечить требуемую точность стабилизации судна при появлении сильных импульсных возмущений. Импульсные возмущения создаются при выходе с судна специальных сбрасываемых объектов: геодезических буев, ложных целей, устройств наблюдения за косяками рыб, сетей и др.
Техническим результатом изобретения является обеспечение требуемой точности стабилизации судна при появлении сильных импульсных возмущений.
Он достигается тем, что в известную систему введен первый, второй, третий задатчики управляющих импульсов, первый, второй, третий компенсирующие органы и задатчик программ, выход которого соединен с входами задатчиков управляющих импульсов, датчик угла крена соединен через блок логики с вторым входом первого задатчика управляющих импульсов, выходы задатчиков управляющих импульсов соединены с входами соответствующего компенсирующего органа.
На чертеже приведена система стабилизации судна. Она содержит датчик угла крена 1, датчик рассогласования по глубине 2, датчик угла дифферента 3, три усилителя 4-6, три исполнительных устройства 7-9, блок логики 10, три задатчика управляющих импульсов 11-13, три компенсирующих органа 14-16, сбрасываемые объекты 17, задатчик программ 18, подводный корабль 19.
Датчик 1-3 через усилители 4-6 связаны соответственно с входами трех исполнительных устройств 7-9, которые воздействуют на корабль при отклонении последнего от заданных значений глубины и угла дифферента.
Совокупные отличия предлагаемой системы стабилизации в том, что она дополнена тремя задатчиками управляющих импульсов 11-13, выходы которых соответственно связаны с входами трех компенсирующих органов 14-16, которые воздействуют на корабль с момента появления возмущающих импульсов, сводя, таким образом, суммарное воздействие на корабль к нулю (близкое к нулю).
Вход блока логики 10 соединен с выходом датчика крена 1, а выход - с блоком сбрасываемых объектов 17 и первым задатчиком управляющих импульсов 11. Задатчик программ 18 соединен с входами задатчиков управляющих импульсов 11-13.
В качестве датчиков углов крена, дифферента 1, 3 могут быть использованы серийно выпускаемые датчики с точностью не хуже 5%. Датчик рассогласования по глубине 2 реализуется из задатчика глубины и датчика текущей глубины и усилителя, на вход которого подключаются выходы этих двух приборов. Усилители 4-6 могут реализовываться на микросхемах типа 140 У Д 6. Исполнительные устройства 7-9 - это либо гидродинамические рули, либо гидростатические рули, в качестве последних используются цистерны, которые либо заполняются водой, либо продуваются воздухом высокого давления по командам задатчиков 11-13. Задатчики управляющих импульсов 11-13 реализуются в виде набора контактных групп, которые по командам по времени (которые заложены в них) включают или отключают соответственно компенсирующие органы 14-16.
Компенсирующие органы реализованы в виде цистерн. Блок логики 10 может быть реализован на типовых дискретных счетно-решающих устройствах, которые позволяют выделять команду на выход того, либо иного сбрасываемого объекта 17. Последнее должно происходить при выполнении логического условия вида
θ = 0 и signθ < 0,
где
θ - угол крена корабля.
Задатчик программ 18 - это матрица программ управления компенсирующими исполнительными органами, реализуемая на дискретных логических элементах. Номер программы связан с видом и количеством выходов сбрасываемых объектов.
Динамика работы.
Движение судна под водой при отсутствии возмущающих импульсов, возникающих после выхода сбрасываемого объекта, нормально стабилизируется в пространстве типовым регулятором, которые подробно описаны в аналогах и прототипе, с П или ПД законом управления. В нашем случае такой регулятор реализован в виде датчиков отклонения корабля по основным фазовым координатам 1-3, усилителей 4-6 и исполнительных устройств 7-9. Однако при выходе с корабля сбрасываемых объектов 17 рассмотренная выше система стабилизации не в состоянии удерживать судно в допустимом коридоре отклонений. Предложенная программно-параметрическая подсистема (дополняющая воздействие рассмотренного выше регулятора с ПД законом управления) сводит импульсное возмущение на судно к нулю. Это достигается тем, что корректирующая подсистема, работающая по программе, заранее рассчитанной, создает компенсирующие воздействия, которые равны и противоположны возмущению при выходе сбрасываемого объекта. Вид и номер выходящего объекта, который должен выходить с судна, заложен в задатчике программ 18, который включает в задатчиках управляющих импульсов 11-13 соответствующие конкретному сбрасываемому объекту программу продувания (заполнения) цистерн, т.е. формирования управляющего импульса по силе и по моменту.
Существенно заметить, что команда на выход сбрасываемого объекта поступает с блока логики только при выполнении условия
Последнее усложнение включения первого исполнительного органа 14 вызвано необходимостью синхронизировать момент создания управляющего импульса момента с фазовым состоянием судна по условию (1), при котором управляющий импульс относительно оси Х тормозит, а не раскачивает дополнительно судно, которое уже имеет бортовую качку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1996 |
|
RU2111892C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
Система стабилизации судна предназначена для обеспечения точности стабилизации судна при появлении сильных импульсных возмущений, создаваемых при выходе с судна специальных сбрасываемых объектов. Система содержит блок логики, датчик рассогласования по глубине, датчик угла дифферента, датчик угла крена, который через первый усилитель соединен с входом первого исполнительного устройства, выход которого подключен к второму входу первого усилителя. Выход датчика рассогласования по глубине соединен через второй усилитель с входом второго исполнительного устройства, выход которого подключен к второму входу второго усилителя. Датчик угла дифферента через третий усилитель соединен с входом третьего исполнительного устройства, выход которого подключен к второму входу третьего усилителя. Выход задатчика программ соединен с входами задатчиков управляющих импульсов, а датчик угла крена соединен через блок логики с вторым входом первого задатчика управляющих импульсов. Выходы задатчиков управляющих импульсов соединены с входами соответствующего компенсирующего органа. 1 ил.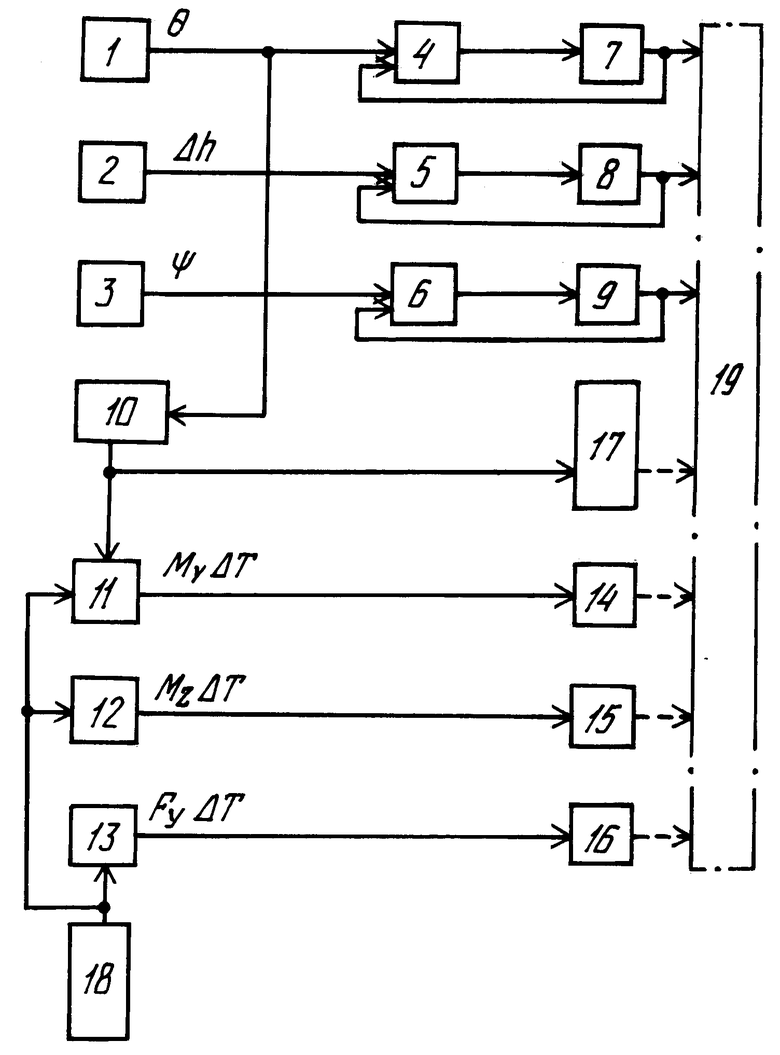
Система стабилизации судна, содержащая блок логики, датчик рассогласования по глубине, датчик угла дифферента, датчик угла крена, который через первый усилитель соединен с входом первого исполнительного устройства, выход которого подключен к второму входу первого усилителя, выход датчика рассогласования по глубине соединен через второй усилитель с входом второго исполнительного устройства, выход которого подключен к второму входу второго усилителя, датчик угла дифферента через третий усилитель соединен с входом третьего исполнительного устройства, выход которого подключен к второму входу третьего усилителя, отличающаяся тем, что в нее введен первый, второй, третий задатчики управляющих импульсов, первый, второй, третий компенсирующие органы и задатчик программ, выход которого соединен с входами задатчиков управляющих импульсов, датчик угла крена соединен через блок логики с вторым входом первого задатчика управляющих импульсов, выходы задатчиков управляющих импульсов соединены с входами соответствующего компенсирующего органа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1529182, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
