Изобретение относится к облает судостроения, в частности к системам управления движением судна.
Известны системы динамического позиционировании судна (А.С. СССР 1615678), стабилизирующие положение надводного либо подводного судна в пространстве. Известны также устройства управления движением судна, которые поддерживают заданное состояние (движение судна в пространстве) при появлении достаточно сильных возмущающих воздействий (оброс трала, геодезического буя, ложной цели и т.д). Известно также устройство управления движением судна (патент России №2133491), которое позволяет использовать всю эффективность рулевого привода в момент появления импульсного возмущения (без нарушения запаса устойчивости замкнутой системы “судно - регулятор-рулевой привод”) путем введения в устройство задатчика смещения руля. В устройство входит также задатчик и датчик текущего угла, датчик угла перекладки руля и датчик угловой скорости, которые подключены но входу суммирующего усилителя, выход последнего подключен к входу рулевого привода.
В качестве прототипа нами принята система стабилизации судна (патент России №217.12.04.), которая содержит задатчик рассогласования, датчик угла дифферента, датчик угловой скорости, датчик угла перекладки руля, выходы которых подключены к входам усилителя. Выход усилителя подключен к входу рулевого привода. Система также содержит два компенсирующих органа, которые представляют собой цистерны, заполняемые водой или продуваемые воздухом высокого давления. Цистерны создают гидростатические силы и моменты для повышения эффективности управления. Однако при появлении сильных воздействий эффективность использования цистерн оказывается недостаточной ввиду низкой скорости изменения плавучести при приеме - откачке воды.
Недостатком рассмотренных устройств является невозможность обеспечить требуемую точность стабилизации судна при малых скоростях хода и особенно при движении судна под водой при появлении сильного возмущающего воздействия.
Применение дополнительных исполнительных органов - балластных цистерн, балласт в которых можно изменять путем откачки или приема воды, оказывается также малоэффективным из-за малой скорости изменения управляющего воздействия (скорость приема или откачки воды обычно не превышает несколько килограмм в секунду, кроме того после момента выдачи команды на включение балластных цистерн исполнение команды происходит спустя несколько секунд).
Существенно заметить, что величина воздействия от сбрасываемых изделий для рассматриваемых нами судов заранее достоверно известна, так же как и время начала действии возмущающего воздействия, поэтому нами предлагается начинать процесс продувания-заполнения цистерн проводить заранее до момента сбрасывания спец. объекта.
Целью предлагаемого изобретения является создание устройства, обеспечивающего заданную точность стабилизации судна при появлении сильных возмущений, величина которых и время действия заранее достоверно известна.
Предлагаемое устройство позволяет:
- стабилизировать движение судна при малых скоростях хода,
- стабилизировать подводное судно с заданной точностью введением в систему дополнительных исполнительных органов - балластных цистерн, включаемых заранее,
- повысить эффективность использования существующих балластных цистерн благодаря включению) их до начала процесса сбрасывании специальных объектов в момент времени tвкл.=То-Δt, где То - время сбрасывания спец. объекта, Δt - время предварительной работы цистерн до момента сбрасывания,
- обеспечить нахождение судна в заданном коридоре точности несмотря на oпережaющее включeниe в работу балластных цистерн, т.к. существующие объекты достаточно инерционны.
Недостатки прототипа устраняются благодаря введению в устройство, кроме замкнутого контура управления рулями, также командного блока и программного блока, обеспечивающего программное по времени управление дополнительным средством стабилизации - цистерной, скорость поступления и осушения воды в которой ограничена, но, что существенно, момент начала включения цистерны выбирается до момента времени начала действия возмущающего воздействия на величину “Δt” и повышается тем самым суммарный эффект от управления.
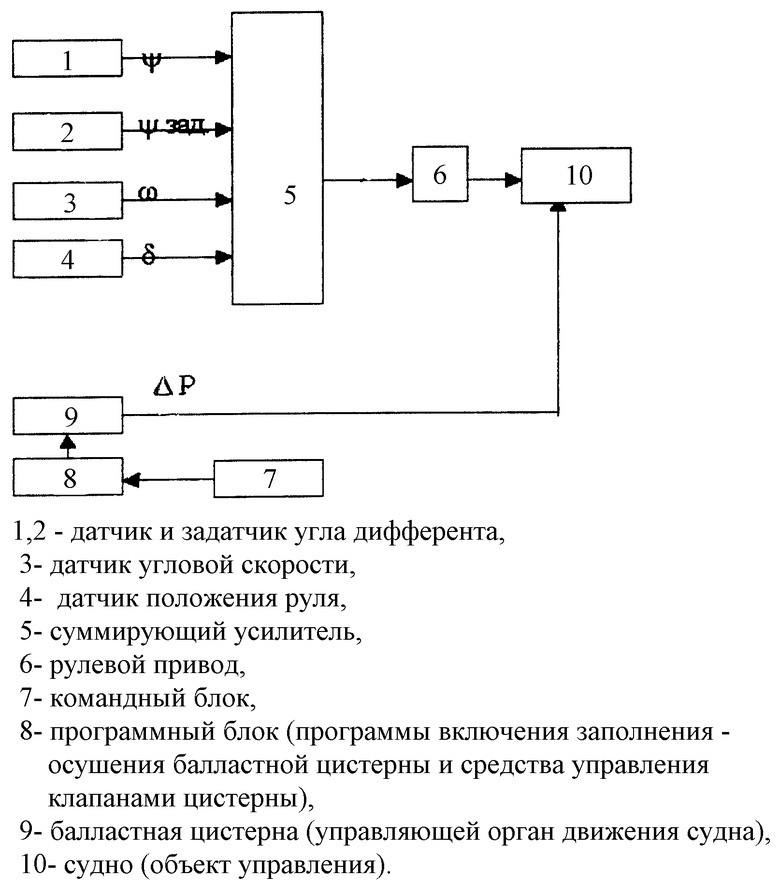
На чертеже приведена блок-схема предлагаемого устройства.
Устройство управления движением судна содержит датчик угла (дифферента) 1, задатчик угла 2, датчик угловой скорости 3, датчик положения руля 4, суммирующий усилитель 5, рулевой привод 6, командный блок 7, программный блок (набор программ включения заполнения (осушения) балластной цистерны во времени и средства управления клапанами цистерны) 8, балластная цистерна (управляющий орган движения судна) 9, судно (объект управления) 10.
В качестве датчика - 1, задачника угла дифферента - 2 и датчика положения руля - 4 могут использоваться серийно выпускаемые измерители угла с точностью не ниже 5%. Датчик угловой скорости - 3-типовой ДУС - 5 с диапазоном измерения 0.05-1.5 гр/сек. Суммирующий усилитель - 5 может быть реализован на операционном усилителе типа 140 УД - 6. Программный блок - 7 включает набор программ-команд на включение или выключение в функции времени клапанов балластной цистерны (составляется набор временных программ включений балластной цистерны с таким опережением включения на время “Δt”, при котором судно не выходит из допустимого коридора по заданной точности удержания угла дифферента, при этом одновременно обеспечивается минимально возможное отклонение судна от равновесного состояния после сброса конкретного спец. объекта).
Программы могут быть реализованы на типовых логических счетно-решающих элементах или микроконтроллере. Команда на выбор конкретной программы поступает с командного блока 7, управляющего также сбрасыванием спец. объекта (программы составляются на основании предварительного моделирования процесса сбрасывания спец. объекта и последующей стабилизации судна с различными временами опережения включения режима заполнения балластной цистерны).
Перечисленные выше блоки системы соединены между собой в соответствии с чертежом.
Описание работы устройства.
Устройство управления движением судна позволяет стабилизировать судно по углу дифферента с малыми ошибками при задании больших возмущений от сбрасывания специальных объектов (тралов, геодезических буев, ложных целей и др.). Это достигается тем, что предварительно из командного блока 7 управления сбрасыванием специального объекта поступает сигнал в программный блок 8 о моменте времени сбрасывания (Ti сек.) с опережением по времени на “Δti” и номер программы заполнения-продувания балластной цистерны, соответствующий конкретному сбрасываемому объекту. После прихода такой команды в программном блоке 8 подключается из набора программ - заданная, которая включает клапана заполнение цистерны с опережением по времени на величину “Δti”, т.е. в момент времени t=Ti-Δti будет включена в работу балластная цистерна (забортная вода начнет поступать в цистерну при открытии клапанов).
Программы строятся предварительно по результатам математического моделирования процесса стабилизации судна при сбрасывании спец. объекта и работе средств стабилизации близко к оптимальному по точности, на основании того, что математическая модель движения судна достоверно известна и известен характер изменения возмущающих и компенсирующих воздействий от перекладки руля и изменения плавучести - ΔР (от заполнения балластной цистерны).
Проведенное моделирование подтвердило целесообразность использования такого устройства т.к. величина отклонения судна от равновесного состояния в процессе сброса спец. объекта сократилась на 35% по сравнению с процессом, когда включение балластной цистерны производился одновременно с моментом начала сбрасывания изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 1996 |
|
RU2111891C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1996 |
|
RU2111892C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
Изобретение относится к области судостроения, в частности к системам управления движением судна. Устройство управления движением судна содержит балластную цистерну, задатчик угла дифферента, датчик угла дифферента, датчик угловой скорости, датчик положения руля. Выходы задатчика и датчиков подключены к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода. Кроме того, устройство содержит командный блок и программный блок. Выход программного блока связан с клапанами заполнения-осушения балластной цистерны, а вход - с выходом командного блока. Достигается заданная точность стабилизации судна при появлении сильных возмущений, величина которых и время действия заранее достоверно известны. 1 ил.
Устройство управления движением судна, содержащее балластную цистерну, задатчик угла дифферента, датчик угла дифферента, датчик угловой скорости, датчик положения руля, выходы задатчика и датчиков подключены к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода, отличающееся тем, что дополнительно содержит командный блок и программный блок, выход которого связан с клапанами заполнения-осушения балластной цистерны, а вход - с выходом командного блока.
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| US 4388889 А, 21.06.1983. | |||

