Предлагаемое изобретение относится к области судостроения, в частности к системам управления движением судна.
Известны системы динамического позиционирования судна (А.С. СССР 1615678), стабилизирующие положение надводного либо подводного судна в пространстве. Известно также устройство управления движением судна (патент России №2238881, прототип), содержащее задатчик угла дифферента, датчик угла дифферента, датчик угловой скорости, датчик положения руля, выходы которых подключены к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода, командный блок, программный блок и балластную цистерну, к входу которой подключен выход программного блока, к входу последнего подключен командный блок. Устройство поддерживает заданное состояние (движение судна в пространстве) при появлении достаточно сильных возмущающих воздействий (сброс трала, геодезического буя, ложной цели и т.д.) с использованием кроме гидродинамических рулей балластных цистерн.
Недостатком рассмотренных выше устройств является невозможность обеспечить требуемую точность стабилизации судна при появлении сильного возмущающего воздействия (величина которого заранее достоверно известна так же, как и время воздействия). Это объясняется тем, что:
- применение дополнительных исполнительных органов - балластных цистерн, балласт в которых изменяется обычным путем, оказывается также недостаточно эффективным из-за низкой скорости изменения плавучести (существующая скорость приема или откачки воды обычно не позволяет скомпенсировать возмущающий импульс в требуемый ограниченный момент времени);
- при закрытии клапанов наддува или вентиляции продолжается неуправляемый процесс - продолжение откачки или приема воды в цистерну ввиду наличия перепада давления в цистерне относительно окружающей среды (давления воды на входе в балластную цистерну и воздуха в балластной цистерне). Это приводит к появлению дополнительного (неучтенного) ухода судна из заданного диапазона состояния.
Целью предлагаемого изобретения является создание устройства, обеспечивающего заданную точность стабилизации судна при появлении сильных возмущений, величина которых и время действия заранее достоверно известна, а скорость заполнения водой цистерн ограничена, т.е. исключение отмеченных выше двух недостатков.
Предлагаемое устройство по сравнению с прототипом дополнительно содержит блок предварительного поддува цистерн воздухом, датчик давления внутри балластной цистерны и клапан поддува цистерн, выход которого соединен с воздушным входом балластной цистерны, а вход - с выходом блока предварительного поддува балластных цистерн, вход которого соединен с выходом датчика давления внутри балластной цистерны, что позволит:
- стабилизировать подводное судно с заданной точностью при появлении сильных внешних воздействий благодаря введению предварительно, до появления возмущения, на судно заданного поддува цистерн воздухом,
- повысить эффективность использования существующих балластных цистерн благодаря предварительной подкачке их воздухом до начала процесса включения в работу балластных цистерн перед сбрасыванием специальных объектов,
- обеспечить нахождение судна в заданном коридоре точности, т.к. существующие объекты достаточно инерционны, то удается не нарушить заданную точность стабилизации судна,
- исключить неопределенность в программном заполнении водой балластных цистерн (второй недостаток прототипа).
На чертеже приведена блок-схема предлагаемого устройства.
Устройство управления движением судна содержит: датчик угла дифферента 1, задатчик угла дифферента 2, датчик угловой скорости 3, датчик положения руля 4, суммирующий усилитель 5, рулевой привод 6, балластную цистерну (управляющий орган движения судна) 7, клапан поддува цистерны 8, блок предварительного поддува цистерн 9, датчик давления внутри балластной цистерны 10, судно (объект управления) 11.
В качестве датчика 1, задатчика угла дифферента 2 и датчика положения руля 4 могут использоваться серийно выпускаемые измерители угла с точностью не ниже 5%. Датчик угловой скорости 3 типовой ДУС-5 с диапазоном измерения 0.05-1.5 гр/сек. Суммирующий усилитель 5 может быть реализован на операционном усилителе типа 140 УД-6. Балластная цистерна 7 является штатной аппаратурой судна. Клапан поддува балластной цистерны 8 устанавливается на корпусе цистерны электромагнитного типа и обеспечивает подачу воздуха внутрь балластной цистерны. Блок предварительного поддува 9 может реализовываться в виде компаратора, на первый вход которого оператор вводит заданное значение давления внутри балластной цистерны, а на второй вход приходит сигнал текущей величины давления в цистерне, при равенстве этих величин на выходе компаратора вырабатывается сигнал на закрытие клапана 8. Датчик давления внутри балластной цистерны 9 с точностью измерения не ниже 5%. Перечисленные выше блоки системы соединены между собой в соответствии с приведенной блок-схемой.
Описание работы устройства.
Устройство управления движением судна позволяет стабилизировать судно по углу дифферента с малыми ошибками при задании больших возмущений от сбрасывания специальных объектов (тралов, геодезических буев, ложных целей и др.).
Это достигается тем, что предварительно до момента сбрасывания в блоке предварительного поддува цистерны 9 оператор устанавливает заданное значение давления воздуха в цистерне в зависимости от вида будущего воздействия (от сбрасываемого объекта) и глубины погружения судна, после чего открывается клапан поддува цистерн 8 и начинается поддув цистерны воздухом. Текущее давление воздуха в балластной цистерне непрерывно измеряется датчиком давления внутри цистерны 10, которое поступает на вход блока предварительного поддува цистерны 9. В момент времени, когда измеренное давление датчиком давления достигнет величины заданного значения, из блока предварительного поддува цистерн поступает команда на закрытие клапана поддува цистерны и выдается сигнал о возможности сбрасывания с судна специального объекта. Величина заданного давления воздуха в цистерне определяется предварительно по результатам математического моделирования процесса стабилизации судна при сбрасывании конкретного спецобъекта и работе средств стабилизации близко к оптимальному по точности. Проведенное моделирование подтвердило целесообразность использования такого устройства, т.к. величина отклонения судна от равновесного состояния в процессе сброса спецобъекта не превышает 2,5%. Такой хороший результат удалось получилось также благодаря повышению скорости входа воды в цистерну.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 1996 |
|
RU2111891C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1996 |
|
RU2111892C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
Изобретение относится к области управления движением судна, в частности специальным судном, которое оборудовано сбрасываемыми объектами. Устройство содержит датчик угла дифферента, задатчик угла дифферента, датчик угловой скорости, датчик положения руля, выходы которых подключены к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода, балластную цистерну. Устройство дополнительно содержит клапан поддува цистерн, блок предварительного поддува цистерн, датчик давления внутри цистерны, выход которого соединен с входом блока предварительного поддува цистерн, выход последнего соединен с воздушным входом балластной цистерны через клапан поддува цистерн. Достигается повышение точности стабилизации судна в процессе сбрасывания специальных объектов. 1 ил.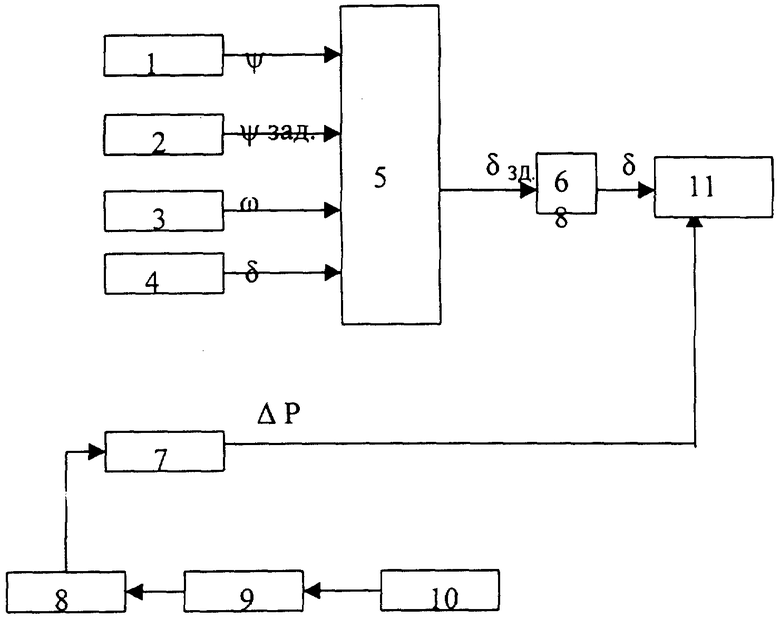
Устройство управления движением судна, содержащее датчик угла дифферента, задатчик угла дифферента, датчик угловой скорости, датчик положения руля, выходы которых подключены к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода, и балластную цистерну, отличающееся тем, что дополнительно содержит клапан поддува цистерн, блок предварительного поддува цистерн, датчик давления внутри цистерны, выход которого соединен с входом блока предварительного поддува цистерн, выход последнего соединен с воздушным входом балластной цистерны через клапан поддува цистерн.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| US 4388889 A, 21.06.1983. | |||

