Изобретение относится к четырехшарнирным механизмам (шарнирным четырехзвенникам), которые применяются в полиграфических, текстильных, швейных, обувных, сельскохозяйственных машинах, в станках, прессах, подъемно-транспортных и других устройствах, и может быть использовано в составе механического оборудования, предназначенного для передачи изменяющихся по величине нагрузок. Четырехзвенники используются в качестве функциональных (целевых), либо применяются в качестве базовых механизмов, на основе которых создаются многозвенные исполнительные механизмы.
Известен, например, шарнирный четырехзвенник в составе промышленной шековой дробилки для крупного и среднего дробления материалов, содержащий шарнирно связанные кривошип, шатун, коромысло и стойку, в котором коромысло является подвижной щекой дробилки, воздействующей на объект дробления.
Основным недостатком данного механизма в составе щековой дробилки является недостаточно высокая его эффективность при передаче переменной нагрузки из-за большого расхода мощности на реализацию процесса. Объясняется это тем, что в интервале кинематического цикла, т.е. в интервалах прямого и обратного хода коромысла, силовая работоспособность механизма непрерывно изменяется, достигая в каких-то положениях его звеньев своих экстремальных значений. При этой положения экстремумов в интервале цикла и ординаты их численных значений зависят от соотношения длин звеньев механизма. Как известно, силовая работоспособность шарнирного четырехзвенника в любом из его положений определяется величиной угла передачи, который обеспечивается при соответствующем текущем положении звеньев. Для преодоления приложенной к коромыслу четырехзвенника технологической нагрузки шатун механизма соответственно должен быть нагружен движущей силой
S = Qп.с./sinμ,
где
S - сила в шатуне, необходимая для движения нагруженного коромысла;
Qп.с - сила полезного сопротивления, приложенная к коромыслу;
μ - угол передачи (равен углу между шатуном и коромыслом, если угол между ними не больше 90o).
Таким образом, при любом значении силы полезного сопротивления уменьшение угла передачи приводит к необходимости увеличения силы S в шатуне, т. е. к необходимости увеличения движущего момента на валу кривошипа и к росту расхода мощности на реализацию процесса.
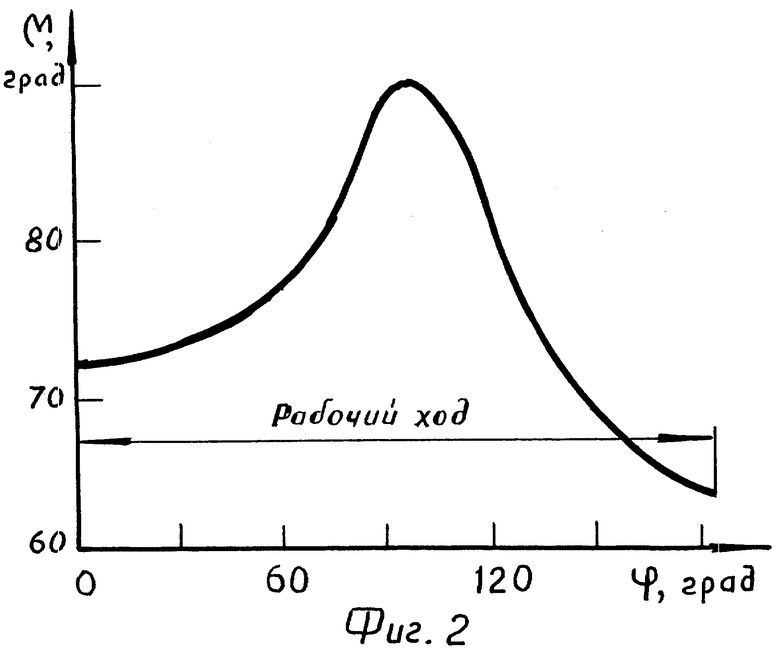
Для обеспечения работы механизма при мало изменяющихся и даже постоянных значениях силы S в шатуне, очевидно, необходимо обеспечить условия, при которых характер изменения силовой работоспособности четырехзвенника (характер изменения угла передачи) будет соответствовать характеру изменения прилагаемой к коромыслу силы полезного сопротивления. При работе щековой дробилки сила полезного сопротивления в интервале прямого (рабочего) хода коромысла оказывается величиной переменной. Она возрастает в начале рабочего хода (в процессе сжатия материала), достигает максимума внутри интервала движения (в момент наибольшего сжатия материала), а затем начинает уменьшаться (с момента начала разрушения материала). Другими словами, Qп.с. является переменной функцией с максимумом внутри интервала ее существования.
Силовая работоспособность механизма, т. е. функция его угла передачи μ = f(ϕ), может быть аналогична функции изменения технологической нагрузки Qп.с.= f(ϕ) лишь при вполне определенных соотношениях длин его звеньев, где ϕ - текущий угол поворота ведущего звена (кривошипа) механизма. Иначе говоря, соответствие функций можно обеспечить лишь при вполне определенных значениях геометрических параметров механизма. Примечательно, что такое соответствие может быть достигнуто только за счет изменения аргументов функции μ = f(ϕ), поскольку Qп.с.= f(ϕ) изменять нельзя, так как она является результатом воздействия рабочего органа (подвижной щеки дробилки) на объект дробления.
Возрастающие с последующим уменьшением нагрузки характерны для большого ряда энергоемких операций многих отраслей промышленности. Возможность эффективной реализации таких операций шарнирными четырехзвенниками основана на соответствующем повышении их схемной и конструктивной силовой работоспособности.
Задача изобретения - повышение эффективности за счет уменьшения расхода мощности при передаче механизмом переменных нагрузок.
Решение поставленной задачи достигается тем, что в механизме для передачи переменных нагрузок, содержащем шарнирно связанные кривошип, шатун, коромысло и стойку, соотношение длин звеньев соответствует выражению
λ
где
λ1= r/d - относительная длина кривошипа;
λ2= L/d - относительная длина шатуна;
λ3= b/d - относительная длина коромысла;
r, L, b - соответственно длина кривошипа, шатуна, коромысла;
d - длина стойки (расстояние между центрами вращения кривошипа и качания коромысла).
При этом, длины кривошипа и шатуна могут изменяться в пределах от значения, равного пулю, до значения, равного длине стойки, а длина коромысла - от значения, равного нулю, до значения, равного 1,2071 длины стойки.
Предлагаемый механизм отличается от прототипа значениями геометрических параметров, т.е. такими значениями длин звеньев в указанных пределах их изменения, при которых гарантированно выполняется равенство (1). Кроме того, предложенный механизм отличается текущим положением элементов (звеньев) в интервале цикла, при котором обеспечивается максимально возможное значение угла передачи (μmax= 90°), т.е. его наибольшая силовая работоспособность.
Для механизма, удовлетворяющего равенству, характерно то, что максимум его силовой работоспособности (максимум угла передачи) имеет место внутри интервала прямого (рабочего) хода, а минимум работоспособности (минимум угла передачи) приходится на интервал обратного (холостого) хода. Такое расположение экстремумов в интервале кинематического цикла оказывается благоприятным для передачи технологической нагрузки, возрастающей при рабочем ходе механизма с последующим ее уменьшением. Благоприятно также, что, варьируя длины звеньев механизма с учетом равенства, можно смешать максимум его силовой работоспособности ближе к середине интервала прямого хода, либо ближе к началу хода. Это позволяет совмещать максимум угла передачи механизма с максимумом передаваемой технологической нагрузки. Следует отметить также, что, варьируя длины звеньев механизма в соответствии с равенством, можно иметь функцию угла передачи при больших или меньших значениях ее ординат. Это дает возможность выбора механизма предпочтительного с учетом абсолютных значений величины передаваемой переменной нагрузки. Таким образом, выражение определяет параметры механизма, который может обеспечивать передачу переменной технологической нагрузки при малых изменениях движущей силы, что способствует выравниванию движущего момента на валу кривошипа и уменьшению эффективности работы механизма.
На фиг. 1 представлен механизм в крайних положениях (OA1В1О1 и O A2В2О1) и в положении максимального угла передачи (OABO1), откуда следует формула и видно, что в этом положении кривошип параллелен коромыслу; на фиг. 2 - график изменения угла передачи в интервале рабочего хода механизма, при λ1= 0,1;λ2= 0,97;λ3= 0,34.
Механизм для передачи переменных нагрузок содержит шарнирно связанные кривошип 1, шатун 2, коромысло 3 и стойку 4, при этом длины звеньев соответствуют выражению 1. На коромысле 3 закреплен рабочий орган 5 для взаимодействия с объектом обработки. В зависимости от характера реализуемой операции или процесса рабочий орган может крепиться на шатуне 2, совершающем сложное плоское движение.
Шарнирный четырехзвенник в качестве щековой дробилки работает следующим образом.
При вращении кривошипа 1 коромысло 3 с рабочим органом 5 совершает возвратно-поворотное движение, состоящее из рабочего и холостого ходов. При рабочем ходе рабочий орган 5 воздействует на объект обработки, в результате чего коромысло 3 несет возрастающую с последующим уменьшением технологическую нагрузку. Сопротивление, оказываемое этой нагрузкой движению коромысла и рабочего органа, преодолевается развиваемой в шатуне 2 необходимой движущей силой. При этом, поскольку изменение угла передачи механизма соответствует характеру изменения технологической нагрузки, движущая сила в шатуне будет близка к постоянному ее значению.
Выполнение длин звеньев механизма в соответствии с равенством 1 обеспечивает необходимые условия для повышения эффективности его работы при передаче переменных (возрастающих с последующим уменьшением) технологических нагрузок.
Источники информации:
1. Антовиль А.Н. Теория механизмов и машин. - М.: Высшая школа, 1961.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141587C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1999 |
|
RU2157934C2 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127842C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1997 |
|
RU2126919C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141586C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127383C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1993 |
|
RU2085451C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
Механизм для передачи переменных нагрузок используется в машиностроении и относится к четырехшарнирным механизмам, используемым в составе механических устройств. В шарнирном четырехзвеннике, содержащем шарнирно связанные кривошип, шатун, коромысло и стойку соотношение длин звеньев выбрано так, что внутри интервала рабочего хода обеспечивается максимальное значение угла передачи, минимальное значение которого приходится на интервал холостого хода. 2 ил.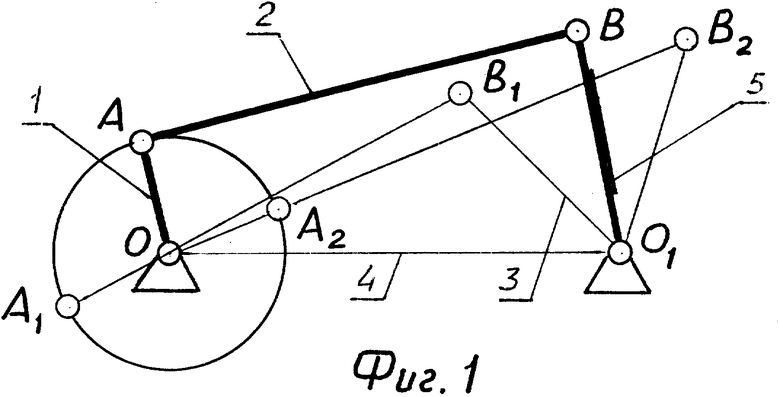
Механизм для передачи переменных нагрузок, выполненный в виде шарнирного четырехзвенника, содержащий шарнирно связанные кривошип, шатун, коромысло и стойку, отличающийся тем, что соотношение длин звеньев соответствует выражению
λ
где
λ1 = r/d - относительная длина кривошипа;
λ2 = l/d - относительная длина шатуна;
λ3 = b/d - относительная длина коромысла;
r, l, b - соответственно длина кривошипа, шатуна, коромысла;
d - длина стойки: расстояние между центрами вращения кривошипа и качания коромысла.
| Антовиль А.М | |||
| Теория механизмов и машин | |||
| - Высшая школа, 1961, с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
