Изобретение относится к области машиностроения, в частности к четырехзвенным шарнирным механизмам, и может быть использовано в составе механического оборудования, предназначенного для передачи значительных по величине силовых нагрузок. Шарнирные четырехзвенники используются в качестве функциональных механизмов, либо применяются в качестве базовых, на основе которых создаются многозвенные исполнительные механизмы.
Известен, например, четырехзвенный шарнирный механизм в составе толкателя термических печей, содержащий шарнирно связанные кривошип, шатун, коромысло и стойку, с коромыслом которого посредством рычага связана подвижная тележка толкателя (Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. - М.: Машиностроение, 1976. - С. 100, 101; рис. 2. 144 - прототип).
Основным недостатком данного механизма в составе толкателя является невысокая его эффективность при выполнении рабочего хода тележки, воздействующей на поддоны с деталями. Это связано с завершением расхода мощности на процесс перемещения тележки. Данный недостаток вызывается несоответствием силовой работоспособности механизма характеру изменения передаваемой технологической нагрузки. Несоответствие проявляется в результате существующей неопределенности в оценке силовой работоспособности четырехзвенных шарнирных механизмов. Это затрудняет выбор предпочтительного механизма.
Силовая работоспособность любого четырехзвенного шарнирного механизма в периоде его кинематического цикла изменяется. Она представляет собой функцию, у которой текущие значения ординат, а также значения и положения экстремумов в интервале цикла, зависят от соотношения длин звеньев механизма. При существующем многообразии четырехзвенных шарнирных механизмов и выраженном влиянии геометрических параметров на их силовую работоспособность значительно усложняется возможность выбора механизма, оптимально соответствующему заданному силовому нагружению.
Силовая работоспособность четырехзвенного шарнирного механизма в любом из его положений определяется величиной угла передачи, который функционально зависим от размера звеньев и того или иного их текущего положения. Для преодоления приложенной к коромыслу механизма технологической нагрузки его шатун должен быть нагружен соответствующей движущей силой S=Qп.с/sin μ, где S - сила в шатуне, необходимая для движения нагруженного коромысла; Qп.с - сила полезного сопротивления, приложенная к коромыслу; μ - угол передачи, при μ ≤ 90o, равный углу между шатуном и коромыслом.
Следовательно, при любом значении силы полезного сопротивления уменьшение угла передачи приводит к необходимости увеличения силы S в шатуне, увеличения движущего момента на валу кривошипа и росту расхода мощности на реализацию процесса или операции.
Для обеспечения работы механизма при значениях силы S в шатуне, мало отличающихся от значений силы Qп.с, необходимо обеспечить условия, при которых характер изменения силовой работоспособности, т.е. характер изменения угла передачи, будет соответствовать изменению прилагаемой к коромыслу механизма силы полезного сопротивления. При работе толкателя термической печи сила полезного сопротивления в интервале рабочего хода коромысла, связанного посредством рычага с подвижной тележкой, оказывается значительной с максимальным значением ее в начале рабочего хода и некоторым уменьшением к концу хода. В толкателях термических печей такая сила нагружает коромысло в течение всего интервала рабочего хода, а при холостом ходе коромысло не несет технологической нагрузки, поскольку связанная с ним тележка перестает воздействовать на поддоны с деталями.
Силовая работоспособность четырехзвенного шарнирного механизма, т.е. функция его угла передачи μ = f(ϕ), может соответствовать функции изменения технологической нагрузки Qп.с = f (ϕ) лишь при вполне определенных соотношениях длин его звеньев. Здесь ϕ - текущий угол поворота кривошипа четырехзвенного шарнирного механизма. Такое соответствие может быть достигнуто только за счет изменения функции μ = f(ϕ), поскольку функцию Qп.с. = f (ϕ) изменять нельзя, так как она является результатом технологического нагружения, т.е. воздействия тележки на поддоны с деталями.
Значительные технологические нагрузки, мало изменяющиеся в интервале начала и конца их приложения, характерны для многих устройств, построенных по аналогии с толкателем термических печей на базе четырехзвенных шарнирных механизмов. Возможность эффективной передачи таких нагрузок четырехзвенными шарнирными механизмами, используемыми в составе таких устройств, основана на соответствующем повышении силовой работоспособности.
Задачей настоящего изобретения является повышение эффективности путем уменьшения расхода мощности при передаче механизмом мало изменяющихся в интервале начала и конца приложения силовых нагрузок.
Решение поставленной задачи достигается тем, что в механизме для передачи силовых нагрузок, например, мало убывающих в интервале их приложения, содержащем шарнирно связанные кривошип, шатун, коромысло и стойку, соотношение длин звеньев соответствует выражению
(λ2-λ1)2+λ
где λ1= r/d - относительная длина кривошипа;
λ2= l/d - относительная длина шатуна;
λ3= b/d - относительная длина коромысла;
r, l, b - соответственно длина кривошипа, шатуна, коромысла;
d - длина стойки, т.е. расстояние между центрами вращения кривошипа и качания коромысла.
При этом относительные длины кривошипа и коромысла могут изменяться в пределах, соответствующих выражению 0 < (λ1; λ3) ≤ 1, а относительная длина шатуна - в пределах, соответствующих выражению 0 < λ2≤ 1,2071.
Заявляемый механизм отличается от прототипа значениями геометрических параметров, т.е. такими значениями длин звеньев в указанных пределах их изменения, при которых гарантированно выполняется равенство (1).
Для механизма, удовлетворяющего равенству (1), характерно то, что максимум его силовой работоспособности (максимум угла передачи) имеет место в момент начала рабочего хода коромысла, а минимум силовой работоспособности (минимум угла передачи) приходится на интервал холостого хода. Такое положение экстремумов в периоде кинематического цикла оказывается благоприятным для передачи технологической нагрузки, характерной для толкателя термических печей. Это очевидно, если учесть, что при функционировании толкателя технологическая нагрузка генерируется лишь при рабочем ходе коромысла и связанной с ним тележки, а холостой ход толкателя выполняется без технологического нагружения. Благоприятно также, что, варьируя длины звеньев механизма в соответствии с равенством (1), можно иметь функцию угла передачи при больших или меньших значениях ее ординат. Это дает возможность выбора механизма, предпочтительного с учетом абсолютных значений величины передаваемой технологической нагрузки.
Таким образом, выражение (1) определяет параметры механизма, который способен обеспечить передачу технологической нагрузки при изменении движущей силы в шатуне соответственно характеру внешнего нагружения. Это способствует выравниванию движущего момента на валу кривошипа и уменьшению расхода мощности на реализацию процесса, т.е. повышению эффективности работы толкателя.
Предлагаемый механизм для передачи силовых нагрузок поясняется чертежами.
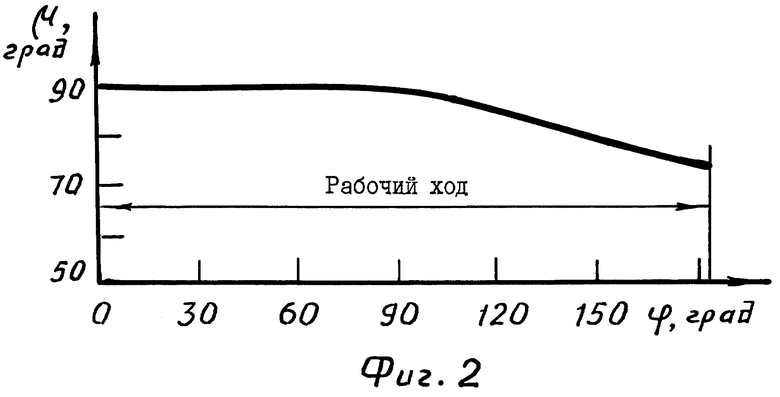
На фиг. 1 механизм ОАВО1 представлен в положении максимального угла передачи, которое определяет начало рабочего хода толкателя, на фиг. 2 представлен график изменения угла передачи в интервале рабочего хода механизма с параметрами λ1= 0,12; λ2= 0,888; λ3= 0,64.
Механизм для передачи силовых нагрузок содержит шарнирно связанные кривошип 1, шатун 2, коромысло 3 и стойку 4, при этом длины звеньев соответствуют выражению (1). С коромыслом 3 посредством промежуточного звена (рычага) 5 связана подвижная тележка 6 с собачками 7 для взаимодействия с установленными на гольганге 8 поддонами 9 с деталями.
Четырехзвенный шарнирный механизм в составе толкателя термических печей работает следующим образом.
При вращении кривошипа 1 коромысло 3 совершает возвратно-поворотные движения, состоящие из рабочих и холостых ходов. Посредством рычага 5 такие движения коромысла преобразуются в возвратно-поступательные движения подвижной тележки 6. При рабочем ходе тележки, соответствующим рабочему ходу коромысла 3, шарнирно укрепленные на ней собачки 7 воздействуют на поддоны 9 с деталями и перемещают их по рольгангу 8. Обратный ход тележка 6 совершает без нагружения, поскольку собачки 7 проскальзывают относительно поддонов 9, которые при этом остаются на рольганге 8 в неподвижном положении. Сопротивление, оказываемое поддонами и тележкой движению коромысла 3 при его рабочем ходе, преодолевается развиваемой в шатуне 2 необходимой движущей силой. При этом, поскольку силовая работоспособность четырехзвенного шарнирного механизма соответствует характеру внешнего нагружения, движущий момент на валу кривошипа будет мало отличаться от момента сил сопротивления.
Выполнение длин звеньев механизма в соответствии с равенством (1) обеспечивает условия для повышения эффективности его работы при передаче силовой нагрузки, мало изменяющейся в интервале ее приложения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ НАГРУЗОК | 1996 |
|
RU2114348C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127842C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141587C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141586C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127383C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1997 |
|
RU2126919C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1993 |
|
RU2085451C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
Изобретение относится к устройствам, используемым в составе механического оборудования для реализации энергоемких операций. Механизм содержит шарнирно связанные кривошип, шатун, коромысло и стойку. С коромыслом посредством промежуточного звена связана подвижная тележка с собачками для взаимодействия с установленными на рольганге поддонами с деталями. Длины звеньев механизма соответствуют математическому выражению, в соответствии с которым максимальное значение угла передачи (μmax = 90o) обеспечивается в момент начала рабочего хода (при наложении шатуна на кривошип). Эффективность работы механизма достигается при передаче силовых нагрузок, мало изменяющихся от начала к концу рабочего хода. Технический результат - повышение эффективности путем уменьшения расхода мощности при передаче силовых нагрузок, мало изменяющихся от начала к концу рабочего хода. 1 з.п. ф-лы, 2 ил.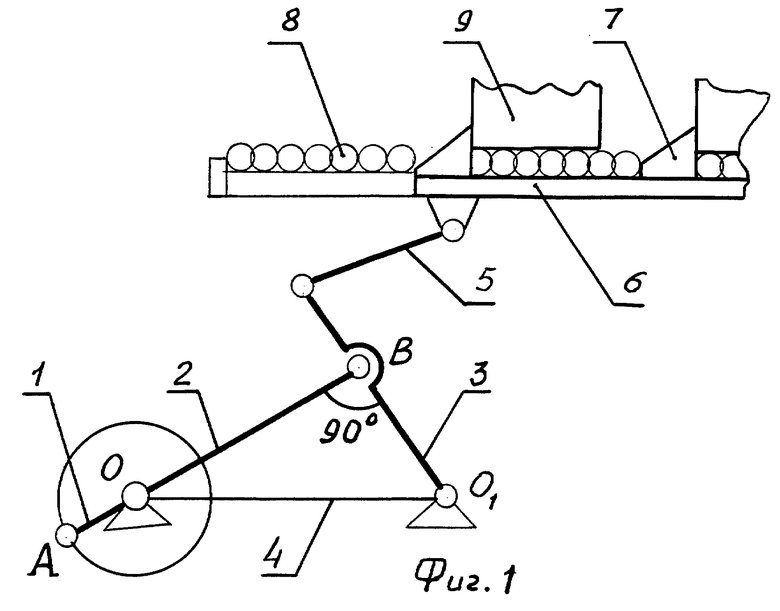
(λ2-λ1)2+λ
где λ1= r/d - относительная длина кривошипа;
λ2= l/d - относительная длина шатуна;
λ3= b/d - относительная длина коромысла;
r, l, b - соответственно длина кривошипа, шатуна, коромысла;
d - длина стойки - расстояние между центрами вращения кривошипа и качания коромысла.
| КОЖЕВНИКОВ С.П., ЕСИПЕНКО Я.И., РАСКИН Я.М | |||
| Механизмы | |||
| - М.: Машиностроение, 1976, с.100 и 101, рис.2.144 | |||
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141586C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ НАГРУЗОК | 1996 |
|
RU2114348C1 |
| Шарнирный кривошипно-коромысловый механизм | 1984 |
|
SU1208381A1 |
| СПОСОБ СТИМУЛИРОВАНИЯ ГУМОРАЛЬНОГО И КЛЕТОЧНОГО ИММУННОГО ОТВЕТА НА ЦЕЛЕВОЙ АНТИГЕН | 1996 |
|
RU2127605C1 |
| Конвейерная обжиговая машина | 1975 |
|
SU549668A1 |
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ ГЕРПЕТИЧЕСКОГО КЕРАТИТА | 1996 |
|
RU2135187C1 |
