Предлагаемое изобретение относится к области машиностроения и может быть использовано в станках, прессах, насосах, грохотах и других устройствах, работающих при значительных силовых нагрузок. По структуре кинематической цепи предлагаемый механизм представляет собой шарнирный четырехзвенник (кривошипно-коромысловый механизм). Четырехзвенники используются в качестве функциональных механизмов, либо применяются как базовые устройства для создания многозвенных механизмов.
Известен, например, шарнирный четырехзвенник в составе качающегося грохота для классификации (фракционирования), промывки, обезвоживания или обесшламливания кусковых материалов. Данный механизм содержит шарнирно связанные кривошип, шатун коромысло и стойку, в котором шатун является исполнительным звеном с закрепленным на нем рабочим коробом (Сиденко П.М. Измельчение в химической промышленности. - М.: Химия, 1968. - С. 258, рис. 184 (г; д; е).
Основным недостатком шарнирного четырехзвенника, используемого в составе качающегося грохота, является недостаточно высокая его эффективность при передаче силовой нагрузки, переменной в интервалах прямого и обратного ходов. Это проявляется в завышении расхода мощности на реализацию процесса грохочения. Первопричина недостатка (завышения расхода мощности) заключается в несоответствии переменной силовой работоспособности четырехзвенника изменению технологической нагрузки, т.е. характеру изменения сил, возникающих при функционировании грохота.
При работе грохота прямые и обратные ходы четырехзвенника являются рабочими ходами. Однако силовая нагрузка в каждом из ходов оказывается переменной, а изменение нагрузок не является адекватным, поскольку в одном из ходов обеспечивается перемешение материала по длине короба. При этом, наибольшая нагрузка и соответствующий ей расход мощности в периоде кинематического цикла четырехзвенника имеют место при текущих значениях угла поворота кривошипа, близких к 45; 135; 225 и 315o. Законы изменения нагрузки и мощности в периоде цикла близки к закону синуса.
Движущий момент на валу кривошипа, необходимый для преодоления момента всех сопротивлений, зависит от величины движущих сил в звеньях четырехзвенника, соответствующих силам полезных и вредных сопротивлений. То или иное распределение движущих сил (при заданных значениях сил сопротивления) в свою очередь зависит от соотношения длин звеньев механизма. Соотношение длин звеньев определяет собой характер изменения угла передачи и, соответственно, характер изменения силовой работоспособности механизма в периоде его кинематического цикла. От соотношения длин также зависят положения экстремумов силовой работоспособности (экстремумов функции угла передачи) в периоде цикла.
При существующем многообразии шарнирных четырехзвенников и выраженном влиянии геометрических параметров на их силовую работоспособнсоть значительно усложнен выбора механизмов, оптимально соответствующих заданному силовому нагружению. Этим объясняется неоправданное, но частое использование для передачи силовых нагрузок таких четырехзвенников, силовая работоспособность которых мало соответствует характеру их внешнего нагружения.
Известно, что силовая работоспособность шарнирного четырехзвенника в любом из его положений определяется величиной угла передачи, который обеспечивается при текущем положении звеньев. Известно также, что при любом значении передаваемой внешней нагрузки уменьшение угла передачи приводит необходимости увеличения движущего момента на валу кривошипа и росту расхода мощности на реализацию процесса. Силовая работоспособность шарнирного четырехзвенника, т. е. функция его угла передачи, может соответствовать функции изменения внешней нагрузки лишь при вполне определенных значениях длин звеньев.
Повышение эффективности работы качающегося грохота основывается на возможности использования шарнирного четырехзвенника, имеющего равновеликую силовую работоспособность в интервалах прямого и обратного ходов, с малым перепадом между экстремальными значениями функции угла передачи.
Задачей настоящего изобретения является повышение эффективности путем уменьшения расхода мощности при передаче механизмом мало изменяющихся по величине в периоде цикла силовых нагрузок.
Решение поставленной задачи достигается тем, что в механизме для передачи силовых нагрузок, например, мало изменяющихся по величине, содержащем шарнирно связанные кривошип, шатун, коромысло и стойку, соотношение длин звеньев соответствует выражению
(1-λ1)2 = λ
где λ1 = r/d - относительная длина кривошипа;
λ2 = l/d - относительная длина шатуна;
λ3 = b/d - относительная длина коромысла;
r, l, b - соответственно длины кривошипа, шатуна, коромысла;
d - длина стойки: расстояние между центрами вращения кривошипа и качания коромысла.
Установлено, что в механизмах, удовлетворяющих выражению (1), относительная длина кривошипа может изменять в пределах, определяемых выражением 0 < λ1 ≤ (0,17156), а относительные длины шатуна и коромысла в пределах, определяемых выражением 0 < (λ2;λ3) < 1.
Заявляемый механизм отличается от прототипа значениями геометрических параметров, т.е. такими значениями длин звеньев в указанных пределах из изменения, при которых гарантированно выполняется равенство (1). Кроме того, предложенный механизм отличается большими численными значениями углов передачи, которые обеспечиваются при текущих положениях звеньев, т.е. большей силовой работоспособностью по сравнению с прототипом.
Для механизма, удовлетворяющего равенству (1), характерно то, что функция его силовой работоспособности в интервалах прямого и обратного ходов близка к своему среднему значению. Такой характер изменения функции в интервале кинематического цикла оказывается благоприятным для передачи мало изменяющейся нагрузки, аналогичной изменению силовой нагрузки при работе качающего грохота. Благоприятно, что, варьируя длины звеньев механизма в соответствии с равенством (1), можно иметь функцию угла передачи при больших или меньших значениях ее ординат. Этим обеспечивается возможность выбора механизма, предпочтительного для абсолютных значений величины передаваемой внешней силовой нагрузки.
Таким образом, выражение (1) определяет геометрические параметры механизма, который может обеспечивать передачу силовой нагрузки при значениях движущих сил, мало отличающихся от сил внешнего нагружения. Это способствует выравниванию движущего момента на валу кривошипа и уменьшению расхода мощности на реализацию процесса грохочения, т.е. повышению эффективности работы качающегося грохота.
Предлагаемый механизм для передачи силовых нагрузок поясняется чертежами.
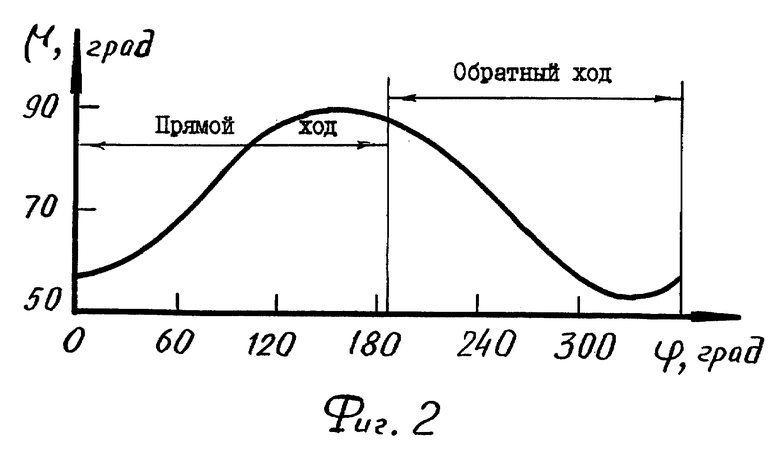
На фиг. 1 механизм представлен в положении максимального угла передачи OABO1 и в крайних положениях OA1B1O1 и OA2B2O1; на фиг. 2 изображен график изменения угла передачи за период кинематического цикла, т.е. за один оборот кривошипа, для механизма, соответствующего равенству (1) при λ1 = 0,1; λ2 = 0,8 и λ3 = 0,41 с абсолютными значениями длин звеньев, мм: r = 15, l = 120, b = 62 и d = 150.
Механизм для передачи силовых нагрузок содержит шарнирно связанные кривошип 1, шатун 2, коромысло 3 и стойку 4, при этом длины звеньев соответствуют выражению (1). На шатуне 2 закреплен рабочий короб (сито) 5, в днище которого имеются калиброванные отверстия или щели в зависимости от целевого назначения грохота.
Шарнирный четырехзвенник в составе качающегося грохота работает следующим образом.
При вращении кривошипа 1 шатун 2 с закрепленным на нем коробом 5 совершает движение, близкое к возвратно-поступательному, поскольку длина кривошипа мала по сравнению с длинами стойки и шатуна. При движении шатуна обрабатываемый материал движется по коробу от его входного конца к выходному и рассеивается на фракции. Момент сопротивления, возникающий от действия внешней нагрузки, преодолевается необходимым движущим моментом на валу кривошипа. При этом, поскольку силовая работоспособность четырехзвенника соответствует характеру внешнего нагружения, движущий момент будет мало отличаться от момента сил сопротивления.
Выполнение длин звеньев механизма в соответствии с равенством (1) позволяет повысить эффективность его работы при передаче силовых нагрузок, изменяющихся в интервалах прямого и обратного ходов исполнительного звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141587C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1997 |
|
RU2126919C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127842C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ НАГРУЗОК | 1996 |
|
RU2114348C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127383C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1999 |
|
RU2157934C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1996 |
|
RU2146212C1 |
Механизм относится к области машиностроения и может использоваться в устройствах, работающих при значительных силовых нагрузках. Механизм представляет собой шарнирный четырехзвенник, состоящий из кривошипа, шатуна, коромысла и стойки. Длины звеньев механизма удовлетворяют выражению (1-λ1)2= λ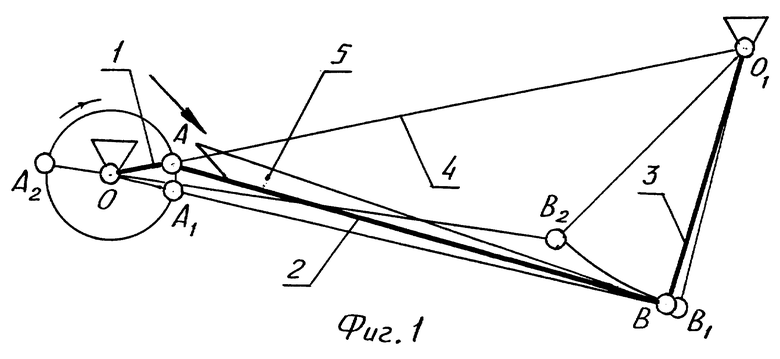
(1-λ1)2 = λ
где λ1 = r/d - относительная длина кривошипа;
λ2 = l/d - относительная длина шатуна;
λ3 = b/d - относительная длина коромысла;
r, l, b - соответственно длине кривошипа, шатуна, коромысла;
d - длина стойки: расстояние между центрами вращения кривошипа и качания коромысла.
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ НАГРУЗОК | 1996 |
|
RU2114348C1 |
| Сиденко П.М | |||
| Измельчение в химической промышленности | |||
| - М.: Химия, 1968, с.258, рис.184 (г, д, е ) | |||
| RU 20738036 C1, 20.02.97 | |||
| ЧЕТЫРЕХЗВЕННЫЙ ШАРНИРНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ ЯРИМОВА | 1991 |
|
RU2043550C1 |
