Изобретение относится к системам автоматизированного раскроя и соединения с программным управлением выкроенного материала, таким как системы захвата и транспортировки отрезанных сегментов мягкого материала с целью последующей обработки.
В области соединения мягких материалов отдельные сегменты кроят из листового материала, а затем подают эти сегменты в зону технологической подготовки для их соединения в различных сочетаниях, возможно - с другими материалами. Потом полученные предварительные формы перерабатывают в различные изделия.
Хотя раскрой и шитье являются старой и известной областью, существует постоянная потребность в адаптации к специальным особенностям вновь разрабатываемых мягких материалов. Многие из этих новых материалов являются легкими и тонкоткаными, а также прочными и долговечными, такие материалы включают в себя специальные синтетические продукты, используемые в верхней одежде, или эпоксидно-графитовые материалы (композиты), используемые в спортивных товарах, надувных помещениях и т.п.
В частности, при изготовлении композиционных элементов путем литьевого прессования с применением эпоксидных смол, предварительную форму получают из слоев сухих тканых композиционных материалов, таких как стекловолокно или углеродные волокна. Эту предварительную форму затем помещают в литейную форму, куда впрыскивают смолу для получения готового изделия. Изготовление этих предварительных форм может быть трудоемким делом. С одной стороны, по причинам контроля качества предварительная форма должна быть собрана точно, а с другой стороны, композитные материалы обычно являются свободно ткаными и склонны к деформации и расчленению волокон при малейшем прикосновении. Поэтому существует потребность в усовершенствованных средствах удаления отдельных выкроенных сегментов с раскраиваемого листа тонкого мягкого материала при одновременном сохранении формы удаляемого сегмента и при отсутствии нарушений структуры остающихся выкроенных сегментов и обрезков.
Известен способ автоматизированного раскроя листа заготовки, заключающийся в автоматическом позиционировании листа заготовки на поверхности опоры, автоматическом позиционировании и задействовании резака над поверхностью опоры для раскроя листа заготовки с образованием границы выкроенного сегмента заготовки и в автоматическом позиционировании и задействовании устройства захвата над поверхностью опоры для захвата и последующего удаления выкроенного сегмента заготовки [1].
Устройство для осуществления известного способа содержит раскройный механизм, выполненный с возможностью позиционирования над поверхностью опоры, устройство захвата с механизмом захвата и удаления выкроенного сегмента заготовки заданной формы, установленным с возможностью регулирования его положения над поверхностью опоры, и зацепления выкроенного сегмента заготовки, и средство управления [1].
Известен также механизм захвата и удаления выкроенного сегмента заготовки заданной формы, содержащий две плиты, несущие упругие коленчатые иглы, консольные концы которых размещены на одном уровне параллельно плоскости опоры под острыми углами к ней, и механизм управления устройством для зацепления иглами заготовки и удаления ее с игл [2].
Однако известные в настоящее время оборудование и технологические процессы не способствуют в должной мере решению вопроса транспортировки материалов с обеспечением эффективности затрат. Поэтому предложенное техническое решение должно обеспечить обработку сегментов тонкого раскроенного материла при минимуме деформации материала и должно обеспечить это при массовом производстве с высокой воспроизводимостью и при минимуме обрезков и отходов.
Другая проблема имеет место в случае обработки пропитанных специальных материалов, обладающих клейкостью, таких как пропитанные синтетическими смолами волокна. Возникает необходимость удаления выкроенного сегмента с оставшегося материала без приклеивания к захватывающему устройству. Кроме того, захватывающее устройство должно быть способно плавно выгружать захваченный выкроенный сегмент и подавать его в зону технологической подготовки гладким и неповрежденным несмотря на клейкость поверхности материала.
Поэтому задача настоящего изобретения заключается в том, чтобы разработать способ и устройство для автоматизированной обработки мягкого материала, свободные от недостатков, присущих известному уровню техники.
Другая задача настоящего изобретения заключается в том, чтобы разработать устройство для захвата выкроенного сегмента мягкого материала и подачи его в зону технологической подготовки обеспечением точного позиционирования и без деформации отобранного сегмента.
Для решения указанных задач в предлагаемом способе автоматизированного раскроя осуществляют автоматическое позиционирование покровного листа, накрывающего лист заготовки, после его позиционирования на опоре, закрепляют сборку этих листов на поверхности опоры, осуществляют ее раскрой с образованием совпадающих границ выкроенных сегментов заготовки и покровного листа, после чего осуществляют захват и удаление выкроенного покровного сегмента с возможностью раскрытия выкроенного сегмента заготовки при поддержании остатка покровного листа и листа заготовки с выкроенным сегментом, по существу недеформированными на поверхности опоры, а при захвате и удалении выкроенного сегмента заготовки его сохраняют по существу недеформированным, поддерживая по существу недеформированными остатки листа заготовки и покровного листа на поверхности опоры.
В качестве покровного листа используют пленочный материал, а захват выкроенного покровного сегмента осуществляют с использованием вакуума.
Кроме того, при захвате сегмента заготовки ее пронизывают чесальными элементами, не воспринимаемыми материалом покровного листа, а при удалении выкроенного сегмента заготовки осуществляют позиционирование захватывающего рабочего органа над раскрытым выкроенным сегментом заготовки и наклон рабочего органа к раскрытому выкроенному сегменту заготовки и по меньшей мере к части окружающего участка покровного листа с предотвращением его зацепления при зацеплении выкроенного сегмента заготовки.
Устройство для автоматизированного раскроя листа заготовки согласно изобретению имеет средство для распределения по поверхности опоры сборки раскраиваемых материалов, включающее покровный лист, расположенный поверх листа заготовки, а раскройный механизм выполнен с возможностью раскроя сборки материалов на поверхности опоры и образования сегментов заготовки листа и покровного листа заданной формы с совпадающими границами, при этом устройство захвата снабжено механизмом захвата выкроенного покровного сегмента, установленным с возможностью регулирования его положения над поверхностью опоры и удаления выкроенного сегмента покровного листа с поверхности опоры с сохранением выкроенного сегмента заготовки по существу недеформируемым на указанной поверхности, а механизм захвата и удаления выкроенного сегмента заготовки выполнен с возможностью предотвращения захвата покровного листа при зацеплении выкроенного сегмента заготовки.
Кроме того, механизм захвата и удаления выкроенного сегмента заготовки заданной формы содержит пронизывающее устройство, расположенное напротив поверхности опоры, причем лист заготовки выполнен с возможностью пронизывания пронизывающим устройством, а материал покровного листа выполнен по существу не пронизываемым пронизывающим устройством, при этом лист заготовки представляет собой тканое полотно.
В механизме захвата и удаления выкроенного сегмента заготовки заданной формы согласно изобретению одна плита размещена под другой с возможностью сдвига относительно нее вдоль оси, параллельной плоскости опоры, а иглы размещены в матрацах, выполненных в плитах, и собраны в виде перемежающихся полос, каждая из которых разделена на отдельные полоски, при этом механизм управления имеет средства управления для избирательной установки соседних чесальных полос в направлении оси, параллельной плоскости опоры, и для перемещения каждой полоски избирательно в направлении, перпендикулярном плоскости опоры, в выдвинутое и втянутое положения.
Кроме того, он дополнительно содержит множество снимающих лопаток, расположенных между перемежающимися чесальными полосами, и связанное с ними средство регулирования открытых верхних концов лопаток с возможностью установки их в плоскости, расположенной избирательно за плоскостью или ниже плоскости консольных концов коленчатых игл в выдвинутом положении, а открытые верхние концы снимающих лопаток имеют не допускающие прилипания покрытие.
Таким образом механизм захвата выкроенного сегмента покровного листа способен поднимать выкроенный сегмент покровного листа, чтобы раскрыть лежащий под ним выкроенный сегмент заготовки без деформации остающегося покровного листа или раскрытого выкроенного сегмента заготовки без нарушения равновесия листа заготовки. Кроме того, механизм захвата и удаления выкроенного сегмента заготовки способен без деформации захватывать, поднимать и, если потребуется, после этого соединять раскрытый таким образом выкроенный сегмент заготовки без деформации или повреждения сегмента заготовки и без деформации оставшихся листов для подачи выкроенного сегмента заготовки в зону последующей технологической подготовки.
На фиг. 1 изображен вид в изометрии предлагаемого устройства раскроя; на фиг. 2 - частичное изображение вида сверху устройства на фиг. 1; на фиг. 3 - изображение выкроенного сегмента заготовки с наложенным на него и связанным с ним выкроенным покровным сегментом; на фиг. 4 - вид сбоку устройства захвата с двумя предлагаемыми механизмами захвата; на фиг. 5 - вид сбоку варианта предлагаемого механизма захвата и удаления заготовки; на фиг. 6 - вид сверху варианта, изображенного на фиг. 5; на фиг. 7 - вид в изометрии механизма захвата чесального типа для варианта, показанного на фиг. 5; на фиг. 8 - вид сбоку коленчатых игл механизма захвата чесального типа, показанного на фиг. 5; на фиг. 9 - перевернутое изображение с пространственным разделением деталей варианта, показанного на фиг. 5; на фиг. 10 - перспективное изображение другого предлагаемого варианта механизма захвата.
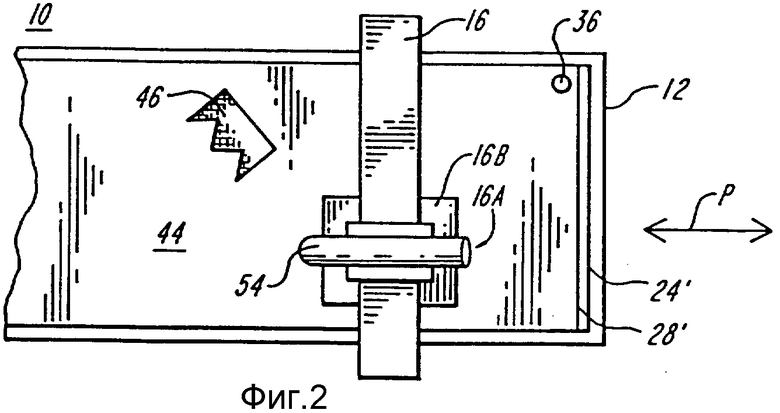
Устройство 10 автоматизированного раскроя листа заготовки, изображенное на фиг. 1 и 2, содержит установленный на стойке 14 раскройный механизм 14B, выполненный с возможностью позиционирования над поверхностью опоры, в виде раскройного стола 12, устройство захвата 16 и узел 18 распределителя листового материала, причем все они находятся под управлением средства управления 20, которое может быть выполнено в виде программируемого цифрового компьютера или подобного устройства. Узел 18 распределителя материала включает в себя первый рулон 22 листа 24 материала заготовки и второй рулон 26 листа 28 покровного материала. Привод стойки 14 и устройства 16 осуществляется от электродвигателя, при этом они перемещаются вдоль главной оси P стола 12 на паре параллельных горизонтальных направляющих рельсов 30 (показан только один из них), прикрепленных и простирающихся вдоль главной оси на соответствующей стороне стола.
На стойке 14 установлен также зажимной механизм 14A. Стойку 14 сначала располагают на позиции A загрузки листов, как показано на фиг. 1, и именно на этой позиции листы материала заготовки и покровного материала захватываются зажимным механизмом 14A и протягиваются над раскройным столом 12 до позиции B соединения.
В частности, свободные концы 24' и 28' материала 24 и покровного листа 28 захватываются зажимным механизмом 14A, находящимся на стойке 14, после чего ее приводят в движение и перемещают из позиции A над столом (вдоль рельсов 30) в позицию B. Затем с помощью источника вакуума 42 подводят вакуум к раскройной платформе 40, чтобы закрепить на нужном месте подаваемую сборку 44 листа заготовки и покровного листа.
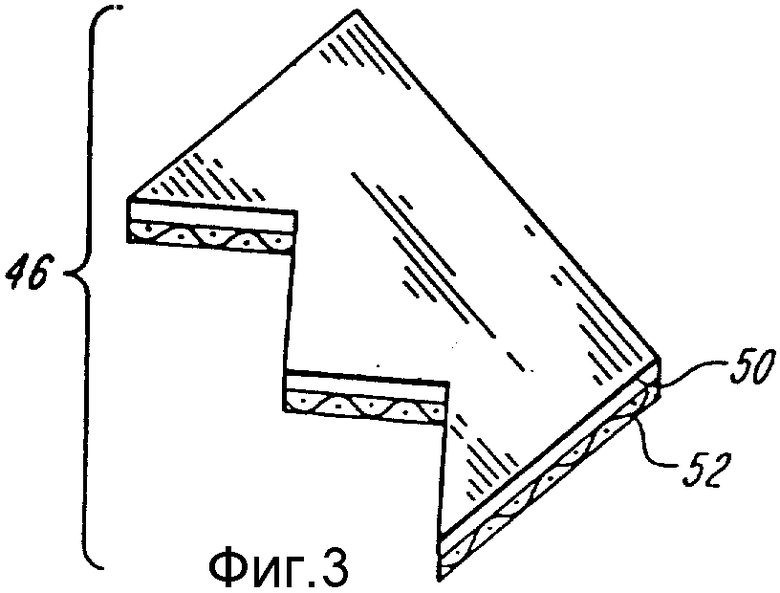
После закрепления сборки 44 листа заготовки и покровного листа на раскройном столе средство управления 20 направляет стойку 14 над поверхностью сборки, давая возможность раскройному механизму 14B выкраивать заданные образцы в листах. Раскройный механизм 14B таким образом осуществляет раскрой и образует границу желаемого сегмента заготовки, вырезанного из листа заготовки, одновременно образуя границу связанного с сегментом заготовки и имеющего соответствующую форму покровного сегмента из листа покровного материала, расположенного непосредственно над сегментом заготовки, причем эти границы раскроя совпадают. Например, как показано на фиг. 3, эталонный рисунок 46, вырезанный в сборке 44 листов раскройным механизмом 14B, определяет выкроенный покровный сегмент 50, расположенный над выкроенным сегментом заготовки 52.
Процесс раскроя повторяют до тех пор, пока не будут выкроены все желаемые рисунки в сборке 44 листов. После завершения раскроя стойку 14 отводят в позицию A, где она не будет мешать последующей работе устройства 16.
Раскройный механизм 14B может принимать форму ножевидных резаков, резаков типа дисков для нарезки пиццы, ультразвуковых резаков, лазерных резаков или иные традиционные формы.
Хотя возможность раскроя тонкого листа материала и обеспечивается, например, с помощью указанных выше устройств, раскрой и укладка (обработка) выкроенных сегментов, например сегментов, выкроенных из листов графитового волокна при изготовлении композиционных эпоксидно-графитовых структур, требует высокой степени аккуратности в обращении, чтобы сохранить целостность выкроенного сегмента, т.е. предотвратить внесение нарушений или деформаций в трикотажный или тканый материал во время захвата и транспортирования выкроенного сегмента в зону последующей сборки. В этом варианте осуществления изобретения такая потребность удовлетворяется одним устройством захвата 16. Устройство захвата 16 не работает до тех пор, пока стойка 14 не выполнит возложенные на него функции и не вернется в позицию A. После этого устройство 16 устанавливается в исходное положение под управлением средства управления 20.
Изображенное на фиг. 4 устройство захвата 16 включает механизм 16A захвата покровного сегмента и механизма 16B захвата и удаления сегмента заготовки, которые функционируют под управлением средства управления 20 и снабжены средствами перемещения по нормали к основной оси вдоль оси Z развертывания или раскроя, предпочтительно по нормали к плоскости уложенных на столе листов. Механизм 16A захвата покровного сегмента расположен поверх образца раскроя, такого как образец 46, и перемещается вдоль оси Z раскроя для зацепления и удаления покровного сегмента 50, за счет чего раскрывается требуемый выкроенный сегмент заготовки 52. После этого отводят назад механизм 16A захвата покровного сегмента и перемещают механизм 16B захвата и удаления сегмента заготовки в положение над раскрытым сегментом заготовки 52. Далее механизм 16B опускают вдоль оси Z, чтобы зацепить сегмент заготовки 52, который затем захватывают, соединяют и транспортируют, если это необходимо, с помощью механизма 16B и выгружают на раскладочном столе 53 или подобном ему приспособлении в зоне C технологической подготовки для осуществления требуемых дальнейших действий.
В предпочтительном варианте осуществления изобретения механизм 16A захвата покровного сегмента включает трубчатый корпус 54, прикрепленный к устройству захвата 16, и рычаг 56 исполнительного механизма, закрепленный внутри корпуса 54. Рычаг исполнительного механизма оканчивается на своем свободном конце всасывающим рабочим органом 58, который соединен с источником вакуума 62 (не показан). Когда механизм захвата 16A находится вблизи от выкроенного покровного сегмента, который надо захватить, рычаг 56 исполнительного механизма выдвигается, рабочий орган 58 зацепляет выкроенный покровный сегмент 50 и с помощью захватывающего вакуума, подводимого с помощью источника вакуума 62, подхватывает сегмент 50. Затем рычаг исполнительного механизма втягивается внутрь трубки корпуса 54 механизма 16A, втягивая захваченный сегмент 50 внутрь трубки и освобождая путь для механизма 16B захвата и удаления сегмента заготовки с целью подъема и транспортировки раскрытого сегмента заготовки 52 в зону C технологической подготовки.
Для оптимальной работы изобретения желательно, чтобы вне зависимости от компоновки механизма захвата, используемого для захвата выкроенного покровного сегмента с раскройного стола, этот механизм захвата выкроенного покровного сегмента должен быть эффективен для материала, образующего покровный лист, и неэффективен для материала, образующего заготовку. Таким образом выкроенный покровный сегмент можно захватить, не внося нарушений в какой-либо из оставшихся материалов. В вышеупомянутом варианте осуществления покровный материал является пленкой, такой как пластмассовая пленка, и он не проницаем для прикладываемого захватывающего вакуума, изолируя таким образом сегмент заготовки 52 от внесения нарушения при воздействии вакуума, обусловленном действием механизма 16A захвата покровного сегмента.
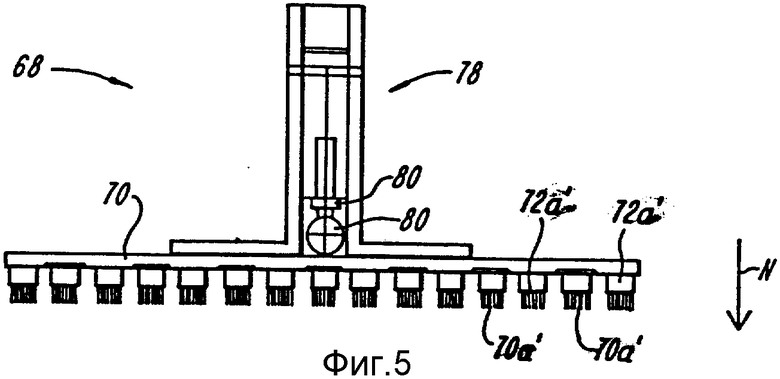
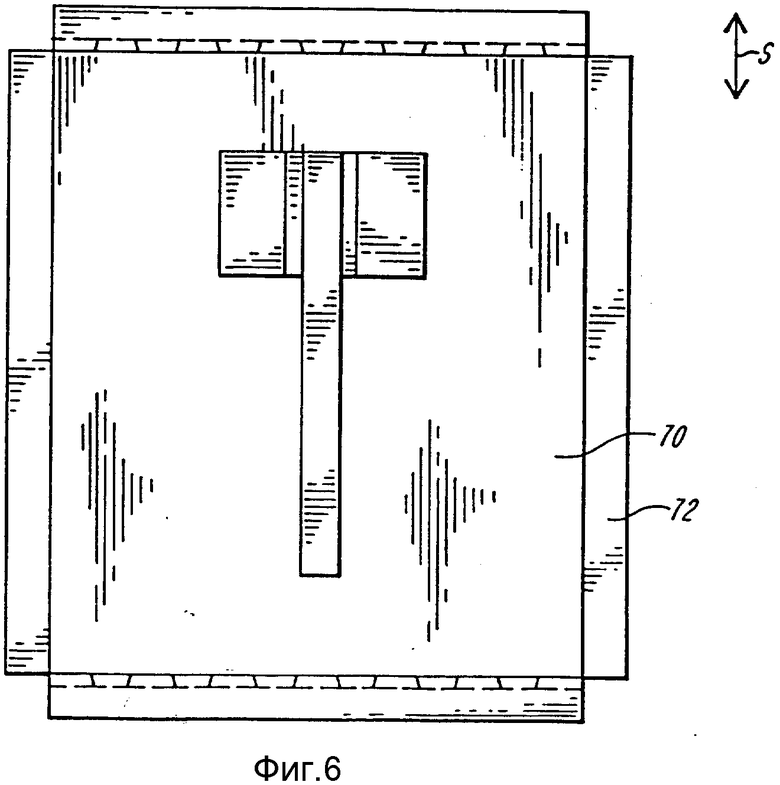
В предпочтительном варианте осуществления изобретения механизм 16B захвата и удаления сегмента заготовки имеет форму шарнирного устройства 68 с исполнительным органом чесального типа. Как показано на фиг. 5 - 9, устройство 68 включает в себя плиту основания 70, лежащую поверх плиты сдвига 72. Обе плиты простираются вдоль оси сдвига S, которая номинально параллельна плоской поверхности опоры заготовки. Верхняя сторона плиты основания 70 прикреплена к одному концу узла сдвига 78, оснащенного исполнительным устройством 80. Плита сдвига 72 установлена на исполнительном устройстве 80, которое приводят в действие избирательно, чтобы осуществить относительное перемещение между плитами основания 70 и сдвига 72 вдоль оси S. В изображенном варианте исполнительное устройство 80 представляет собой пневмоцилиндр, имеющий выходной вал 80,а, который может перемещаться между двумя крайними положениями. Вал 80,а соединен посредством звена (не показано) с плитами 70 и 72 так, что движение вала 80,а между двумя крайними положениями вызывает соответствующее относительное перемещение плит 70 и 72 вдоль оси S под управлением управляющего устройства 20.
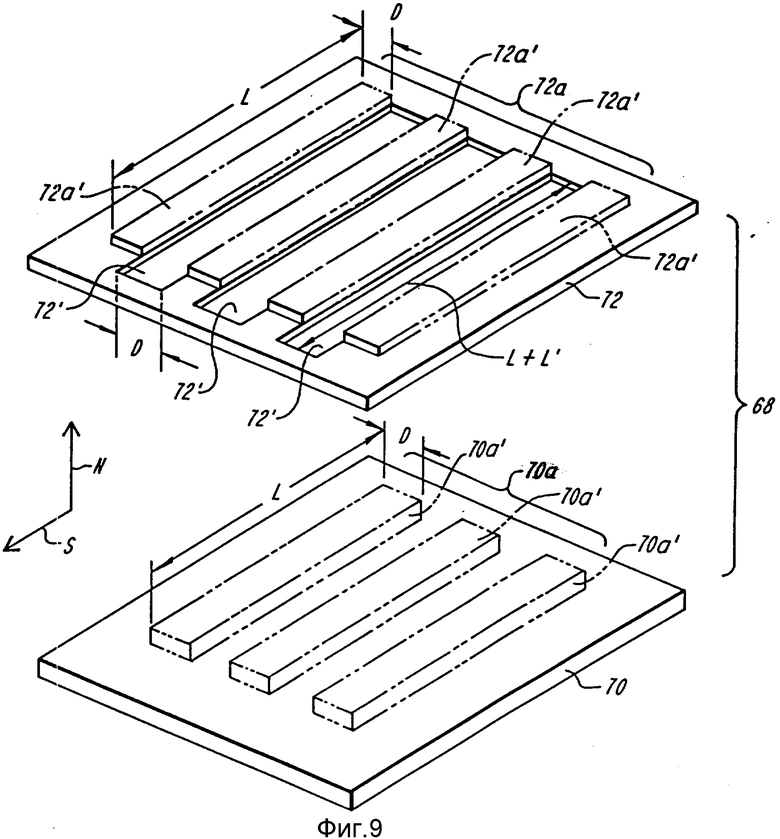
В предпочтительном варианте, как показано на перевернутом изображении устройства 68 с пространственным разделением элементов на фиг. 9, плита 70 представляет собой жесткий прямоугольный элемент, нижняя сторона которого служит опорой трем чесальным элементам 70,a' длины L и ширины, несколько меньшей, чем D, в матрице 70,а, где чесальные элементы расположены рядом и параллельно друг другу, будучи разделенными межэлементным зазором, который несколько больше, чем D. Плита 72 аналогична плите 70. Нижняя сторона плиты 72 служит опорой четырем чесальным элементам 72,a' длины L и ширины, несколько меньшей, чем D, в матрице 72,а, где чесальные элементы также расположены рядом и параллельно друг другу, будучи разделенными межэлементным зазором, который несколько больше, чем D. Плита 72 имеет матрицу сквозных удлиненных пазов 72', каждый из которых расположен между двумя чесальными элементами, и имеет длину L + L' (т.е. больше, чем L, на величину L') в направлении оси S и ширину, равную D, в направлении, поперечном оси S. Чесальные элементы плиты 72 смещены относительно чесальных элементов плиты 70 так, что чесальные элементы матрицы 70,а проходят через пазы в плите 72 и обе матрицы чесальных элементов перемежаются с получением имеющей одинаковую высоту непрерывной чесальной матрицы, по существу не имеющей межэлементных зазоров. При сдвиге плиты 72 относительно плиты 70 в направлении оси S чесальные элементы матриц 70,а и 72,а сдвигаются аналогичным образом.
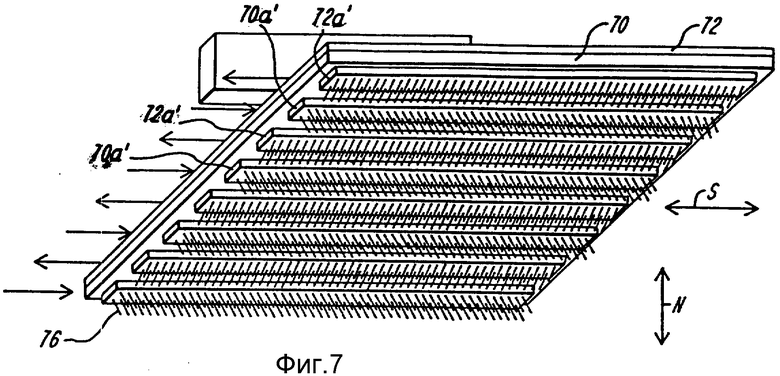
Чесальные элементы матриц 70,а и 72,а могут быть выполнены в форме материала, имеющего множество, по существу, параллельных упругих коленчатых игл 76, которые выступают из основных плоскостей своих соответствующих опорных плит 70 и 72. Коленчатые иглы в чесальных элементах каждой матрицы одинаково отклонены от нормали N под острым углом к их соответствующим опорным плитам. Таким образом в композиционной матрице, образованной матрицами 70,а и 72,а, перемежающиеся комплекты соседних полос (например, полос 70,a' и 72,а' и т.д.) прочеса расположены на плитах 70 и 72 с наклоном относительно соответствующих комплектов игл 76, имеющих противоположные угловые сдвиги. Таким образом, как показано на фиг. 7, первый комплект перемежающихся чесальных полос (например, 72,a'), имеющих коленчатые иглы с первым угловым наклоном, прикреплен к плите основания 70, а второй комплект перемежающихся чесальных полос (например, 70,a), имеющих иглы с вторым (и противоположным) угловым наклоном, прикреплен к подвижной плите сдвига 72.
На фиг. 9 углы коленчатых игл чесальных матриц обозначены наклонными линиями на сторонах изображенных матриц. При такой конфигурации, когда композиционная матрица сначала расположена так, что ее матрицы чесальных элементов имеют основания, минимально отстоящие друг от друга в направлении оси S (фиг. 7), а затем композиционную матрицу наклоняют к заготовке из тканого полотна, и, наконец, матрицы чесальных элементов сдвигают друг относительно друга так, что их основания отстоят друг от друга на минимальное расстояние в направлении S, иглы соответствующих матриц заходят внутрь заготовки и жестко захватывают ее, причем упругая гибкость игл способствует такому захватывающему воздействию. При реверсировании процесса захвата соответствующие иглы извлекаются из заготовки и заготовка высвобождается.
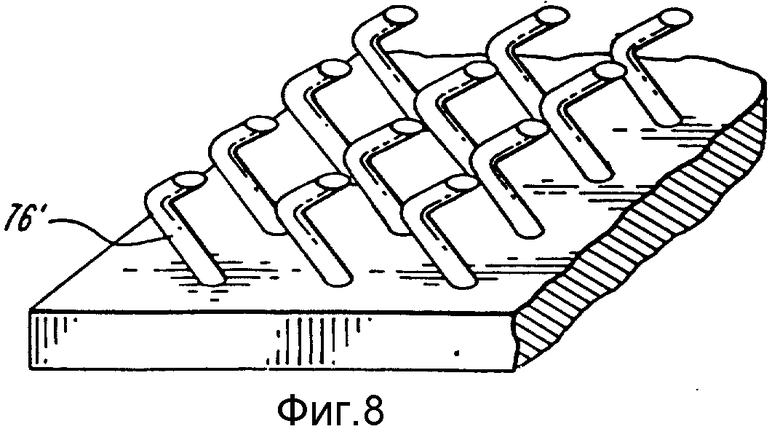
В предпочтительном варианте осуществления иглы имеют резко изогнутую коленчатую форму, консольные концы которых размещены на одном уровне параллельно плоскости опоры (фиг. 8), где показана двухэлементная кусочно-линейная игольчатая форма. Далее иглы в показанном варианте имеют более плоскую поверхность удаленных концов. Такая конфигурация также способствует избирательному захвату и высвобождению заготовки за счет возможности установки равномерно распределенных выступов соответствующих гибких игл.
Чтобы захватить выкроенный сегмент заготовки 52 после удаления выкроенного покровного сегмента 50, лежавшего поверх выбранного сегмента заготовки 52, механизм 16B захвата и удаления сегмента заготовки приводят в движение и устанавливают в исходное положение над раскрытым сегментом заготовки. Затем механизм 16B приводят в движение вдоль оси Z, заставляя его приближаться к раскрытому сегменту заготовки 52 до тех пор, пока иглы 76 не начнут входить в контакт с поверхностью сегмента 52, когда задействуется исполнительное устройство 80, чтобы вызвать относительное перемещение между двумя плитами 70 и 72 вдоль оси Z путем сдвига плиты сдвига 72 из положения, в котором она свободна, в положение, в котором она введена в зацепление (т.е. путем инициирования относительного перемещения между двумя комплектами чесальных полос 70, а' и 72, а'). С целью инициирования относительного перемещения можно перемещать любую из плит 70 и 72 или обе плиты. Этот сдвиг вызывает пробивающее воздействие между противоположными иглами 76 полос, в результате чего происходит мягкий захват сегмента 52 по всей площади его раскрытой поверхности. Покровный лист 28, расположенный над остальной частью заготовки, предотвращает захват коленчатыми иглами частей заготовки, не относящихся к сегменту 52. Как только сегмент 52 надежно зацепляется механизмом захвата 16B, механизм 16B поднимается, поднимая захваченный сегмент 52 со стола с поддержанием плоской конфигурации сегмента, и движется в зону C технологической подготовки, где сегменту 52 придают нужное угловое положение, если это потребуется, и, когда плита сдвига 52 возвратится в высвобожденное положение, сегмент 52 мягко опускают при сохранении его исходной плоской формы для дальнейшей обработки.
Конкретным отличительным признаком изобретения является способность механизма 16B захватывать и поднимать сегмент заготовки 52 мягко и равномерно, по существу по всей площади поверхности захваченного сегмента, без искажения его формы и без искажения формы окружающего листа материала на столе. В предпочтительном варианте осуществления площадь поперечного сечения механизма захвата 16B, приложенная к сегменту заготовки 52, больше, чем площадь поперечного сечения самого сегмента заготовки 52, и механизм захвата 16B фактически накрывает приграничный материал покровного листа, который окружает выбранный сегмент заготовки 52. Таким образом вся поверхность выбранного (целевого) сегмента заготовки 52 подвергается воздействию равномерно распределенных усилий захвата и подъема, когда его как единое целое отбирает и переносит устройство захвата. Таким образом можно захватывать и транспортировать сегмент 52 с минимальным искажением формы захваченного сегмента.
Успеху работы вышеупомянутого варианта осуществления способствует упругость игл и различающийся характер иглопроницаемого материала сегмента 52 и относительно непроницаемого материала покровного листа. В изобретении можно использовать различные другие сочетания материала покровного листа и материала листа заготовки, и, кроме того, материалы покровного листа и листа заготовки можно выбрать надлежащим образом отличающимися друг от друга.
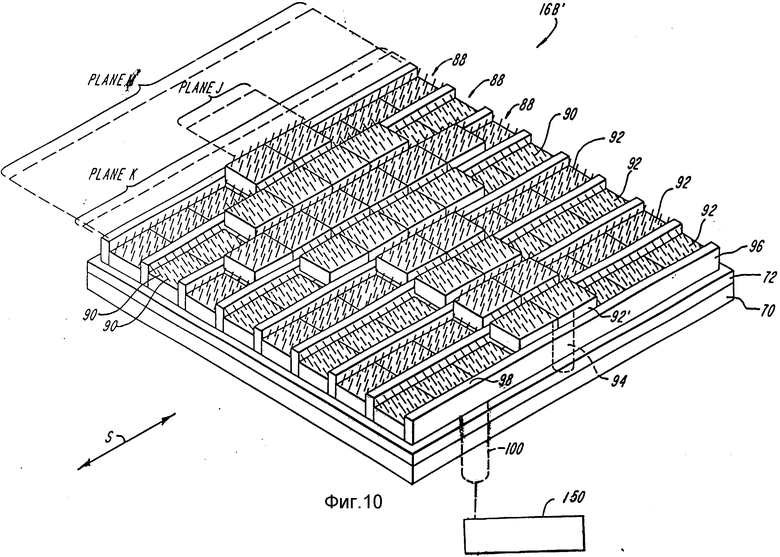
Тем не менее, использование материала покровного листа может быть непрактичным, если материал листа заготовки отличается клейкостью поверхности, в результате чего возникает необходимость возможно трудной операции отделения покровного листа от заготовки. Другой механизм 16B' захвата и удаления сегмента заготовки, изображенный на фиг.6, пригоден, в частности, для использования в случае материала листа заготовки, которому присуща клейкость поверхности. Механизм 16B' обладает теми же возможностями, что и механизм 16B, описанный выше, предпочтительно включая в себя матрицу сдвигаемых друг относительно друга захватывающих полос, таких как чесальные полосы 88, имеющие иглы 90, точно такие же, как описанные выше. Кроме того, каждое средство захвата, например чесальная полоса, образовано из множества отдельных захватывающих участков, полосок 92 и 92'. Каждый захватывающий участок, например полоска 92' или полоска 92, снабжен собственным линейным механизмом управления, например исполнительным механизмом 94, (показанным пунктирным контуром), и индивидуально приводится в движение вдоль нормали к главным плоскостям плит 70 и 72.
В этом варианте консольные концы игл незадействованного захватывающего участка лежат в плоскости покоя M, а такие же консольные концы задействованного захватывающего участка простираются до плоскости захвата J. Таким образом способность индивидуально задействовать выбранные захватывающие участки позволяет захватывать сегменты любой желаемой формы (в пределах разрешающей способности, определяемой площадью соответствующих участков 92') без искажения формы соседних областей заготовки на раскройном стволе за счет задействования только тех захватывающих участков, которые на самом деле расположены над тем целевым сегментом заготовки 52, который нужно захватить.
Чесальные полосы в композиционной матрице отделены друг от друга снимающими лопатками 96, прикрепленными к плите 72. Открытые верхние поверхности снимающих лопаток 96 лежат в плоскости K между плоскостями M и J, что позволяет лопатками снимать захваченный и удерживаемый сегмент с игл задействованных участков полосок 92, когда эти участки оттягиваются обратно в плоскость M незадействованных участков. Это способствует отделению захватывающих участков от клейкого материала удерживаемого захваченного сегмента. В предпочтительном варианте открытые концы снимающих лопаток снабжены не допускающим прилипания покрытием 98, таким как политетрафторэтилен (ПТФЭ).
В проиллюстрированном варианте снимающие лопатки прикреплены к плите 72, но в других вариантах требуемое относительное перемещение снимающих лопаток (относительно захватывающих участков) можно установить посредством исполнительного механизма 100, (изображенного пунктирными линиями), подсоединенного к лопаткам, под управлением управляющего устройства 150. Эти конфигурации лопаток можно также использовать в несегментных конфигурациях снимающих устройств, таких как изображенная на фиг. 9.
Хотя в вышеупомянутом варианте механизмы 16B и 16B' захвата сегмента заготовки рассмотрены в управляемой компьютером системе, где матрица чесальных полос установлена на конце устройства 68 рабочего органа, которое управляется автоматически, понятно, что устройство 68 рабочего органа можно использовать отдельно с управляемым вручную узлом для осуществления относительного перемещения плит 70 и 72 с целью управления захватом заготовки. Такие устройства, в частности, пригодны для подъема и транспортировки вручную гибкой заготовки при сохранении ее формы.
В рамках объема формулы изобретения возможны и другие варианты этого изобретения, очевидные для специалистов в данной области техники. Например, возможны отличающиеся сочетания устройств захвата и материалов, которые также соответствуют рамкам объема и духу настоящего изобретения, которое обеспечивает разработку способа и устройства для раскроя и удаления выкроенного сегмента заданной формы с заготовки из листа мягкого материала при сохранении формы удаляемого сегмента.

Способ и устройства предназначены для неразрушающего удаления выкроенного сегмента заданной формы из заготовки листа мягкого материала и транспортировки выкроенного сегмента заготовки в зону технологический подготовки для дальнейшей обработки. Устройство 10 включает раскройный стол 12, раскройный механизм 14В, устройство захвата 16 и узел 18 распределителя листового материала, причем все они находятся под управлением средства управления 20. Устройство захвата 16 включает механизм 16А захвата покровного сегмента, который удаляет сегмент покровного листа с листа материала заготовки, механизм 16В захвата и удалений сегмента заготовки для извлечения сегмента заготовки заданной формы из листа материала заготовки. Предложенное выполнение обеспечивает удаление и транспортирование снятого сегмента заготовки в зону последующей технологической подготовки в недеформируемом состоянии без искажения формы выкроенного сегмента. При этом остаток покровного листа и листа заготовки так же остается недеформированным. 3 с. и 8 з.п. ф-лы. 10 ил.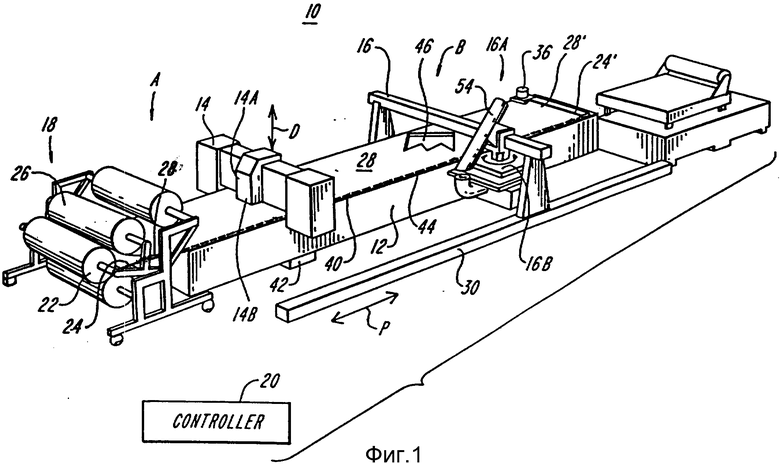
| Хавкин В.П | |||
| и др | |||
| Роботизация технологического оборудования легкой промыш ленности | |||
| - М.: Легкопромбытиздат, 1987, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| US, патент, 4679 784, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
