Изобретение относится к области гидроакустики и может быть использовано для обнаружения и сопровождения подводной цели в охраняемой морской акватории.
Известен способ того же назначения, согласно которому в охраняемой акватории сбрасывают с надводного средства (корабля или самолета) взрывной подводный заряд. Акустические волны, получаемые при взрыве заряда, детектируются гидроакустическим детектором (гидрофоном). И по результатам детектирования судят о наличии подводной цели в охраняемой акватории [1].
Недостатком известного способа является отсутствие возможности определения точных координат цели и ее сопровождения, а также отсутствие скрытности обнаружения цели.
Известен способ обнаружения цели в охраняемой акватории, заключающийся в облучении водной поверхности с надводного средства (например, вертолета) модулированным лазерным излучением на длине волны (9 - 11) мкм, полностью поглощаемым поверхностными слоями воды, и детектировании с помощью гидроакустических приемников акустических волн, возбуждаемых в воде ее нагретой зоной, по результатам которого судят о наличии или отсутствии цели в охраняемой акватории [2].
Данный способ принят за прототип.
Недостатком прототипа является невысокая точность определения координат цели и трудности в ее сопровождении.
Техническим результатом, получаемым от внедрения изобретения является устранение недостатков прототипа, т.е. повышение точности определения координат цели и ее сопровождение.
Данный технический результат достигают за счет того, что в известном способе обнаружения подводной цели в охраняемой акватории, заключающемся в облучении водной поверхности с надводного средства модулированным лазерным излучением с длиной волны (9 - 11) мкм и детектировании с помощью гидроакустических приемников акустических волн, возбуждаемых в воде ее нагретой поверхностной зоной, по результатам которого судят о наличии или отсутствии цели в охраняемой акватории, после обнаружения цели в охраняемой акватории водную поверхность последней облучают над предполагаемым местом расположения цели дополнительным модулированным лазерным излучением с длиной волны (0,6 - 1,1) мкм и детектируют акустические волны, возбуждаемые нагретой поверхностью облученной цели, теми же или дополнительными гидроакустическими приемниками, и по результатам совместного детектирования акустических волн, отраженных от цели и возбуждаемых ее поверхностью в результате лазерных облучений на различных длинах волн уточняют место расположения цели.
Законы модуляции основного и дополнительного лазерных излучений могут совпадать или различаться.
В последнем случае по разности времен прихода акустических волн к гидроакустическим приемникам определяют глубину нахождения цели.
Сканирование лазерного луча с длиной волны (0,6 - 1,1) мкм позволяет осуществить сопровождение цели.
Дополнительное лазерное излучение получают с помощью рубинового или неодимового лазеров, соответственно с длинами волн 0,69 и 1,06 мкм.
В качестве гидроакустических приемников можно использовать гидрофоны, закрепленные на буях, сбрасываемых на водную поверхность с надводного плавсредства.
Изобретение поясняется чертежом, на котором представлена схема реализации способа.
Для реализации способа имеется надводное плавсредство 1, например, вертолет, с приемопередачей радиоантенной 2 и лазерной системой (на чертеже не показана), включающей в себя два лазера на длинах волн 10,6 мкм и 1,06 мкм соответственно на углекислом газе и рубине, фокусирующие системы для каждого из лазеров, модуляторы, сканаторы и оптические детекторы. Подобные лазерные системы для облучения объектов хорошо известны в научно - технической литературе и из прототипа [2], поэтому их описание не приводится.
Имеются также гидроакустические приемники в виде гидрофонов 3, 4, 5.
Гидрофоны 3, 4 могут быть закреплены на буях 6, 7 с передающими радиоантеннами 8, 9, а гидрофон 5, закреплен на дне 10 охраняемой акватории 11 с помощью якорного устройства 12.
Принимаемые сигналы с гидрофонов 3, 4 могут передаваться по радиоканалу в береговой пункт 13 обработки сигналов, снабженного радиопередающей антенной 14.
С гидрофона 5 принимаемые акустические сигналы могут передаваться по кабелю 15 в тот же береговой пункт 13 обработки сигналов.
Береговой пункт обработки сигналов может быть выполнен на базе процессора с дисплеем как в прототипе [2].
Способ обнаружения подводной цели в охраняемой акватории реализуется следующем образом.
С вертолета 1 на поверхность акватории 11 сбрасываются буи 6, 7 с гидрофонами 3, 4 и передающими радиоантеннами 8, 9. При этом на дне 10 охраняемой акватории 11 могут быть закреплены на якорных устройствах 12 дополнительные гидрофоны 5.
Количество гидрофонов 3, 4, 5 диктуется размерами контролируемой акватории 11 и необходимой точностью обнаружения и сопровождения цели, обозначенной на чертеже позицией 16.
С помощью лазерной системы поверхность акватории 11 облучается модулированным лазерным излучением 17 на длине волны 10,6 мкм. (Например, лазерное излучение следует с частотой импульсов f1). На длине волны 10,6 мкм вода обладает металлической непрозрачностью для лазерного излучения [3], которое вызывает нагрев ее поверхностных слоев.
Нагретая поверхностная зона 18 становится источником акустических волн 19 (на чертеже пунктирная линия), которые попадая на цель 16 отражаются от нее. А отраженные от цели волны 20 принимаются гидрофонами 3,4.
Сигналы с гидрофонов после предварительной обработки передаются по радиоканалу в береговой пункт 13 обработки сигналов.
С берегового пункта 13 также по радиоканалу на вертолет 1 поступает команда о включении дополнительного лазерного излучения 21 на длине волны 1,06 мкм, на которой лазерное излучение поглощается водой лишь частично [4]. Поэтому оно достигает цели 16 и нагревает ее поверхность в зоне 22.
Лазерное излучение на длине волны 1,06 мкм может быть модулировано по импульсному закону на частоте f1 или f2, не равной f1.
Акустические волны 23 (на чертеже сплошная линия) также будут модулированы по тому же закону что лазерное излучение.
Если законы модуляции акустических волн 20, 23 будут различны, то по разности времен прихода их к гидрофонам 3 или 4, легко определить глубину залегания цели 16, (поскольку волны проходят различный путь в воде, равный глубине залегания цели). По доплеровской частоте обычным способом определяют скорость движения цели. При этом можно дополнительно использовать информацию с гидрофона 5.
Береговой пункт 13 обработки позволяет на основе полученной информации определить не только координаты цели 16 и скорость, но и направление ее движения. Эта информация по радиоканалу передается на вертолет 1, который осуществляет сопровождение цели путем периодического облучения ее поверхности дополнительным лазерным излучением 21.
Если глубина залегания цели 16 будет такой, что энергии лазерного импульса на длине волны 1,06 мкм будет не хватать для достижения цели, переходят на работу рубинового лазера на длине волны 0,69 мкм. На этой длине волны коэффициент поглощения воды значительно меньше [4], что позволяет достигать глубин в сотни метров.
Поскольку уровень давления акустических волн 20, 23 можно сделать ниже уровня морских шумов, то обнаружение и сопровождение цели будет осуществляться скрытно. А известные законы модуляции волн позволяют тем не менее их выделять на уровне морских шумов.
По сравнению с прототипом появляется возможность точного определения глубины залегания цели, ее скорости и направления движения, а это позволяет в свою очередь осуществлять сопровождение цели, чем достигается поставленный технический результат.
Источники информации
1. P. Дж. Урик. Основы гидроакустики. - Л.: Судостроение, 1978, с. 26, 27.
2. Патент США N 5646907, кл. 367 - 93 (G 01 S 15/00), 1997 - прототип.
3. А. М. Трохан, В.А.Белогольский, Ю.Н.Власов. О поверхностном кипении жидкости. Доклады АН СССР, 1971, 196, N 5, с. 1069-1071.
4. Ю. Н. Власов и др. Оптический визуальный метод исследования течений жидкости. Теплофизика высоких температур, 1972, 10, N5, 1135-1137.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| ТЕРМООПТИЧЕСКИЙ СПОСОБ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2192023C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2157551C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА СО СТАЦИОНАРНЫМ РАЗМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ В ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2168737C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
Изобретение относится к области гидроакустики и может быть использовано для обнаружения и сопровождения подводной цели в охраняемой морской акватории. Существо способа заключается в том, что с помощью модулированного лазерного излучения на длине волны (9-11) мкм облучают водную поверхность акватории. Излучение этой длины волны полностью поглощается поверхностными слоями воды. Зона нагрева становится источником акустических волн. Отраженные от цели волны принимаются гидрофонами. Полученные сигналы обрабатываются и затем дают команду на облучение места предполагаемого залегания цели дополнительным модулированным лазерным излучением на длине волны (0,6-1,1) мкм. Изучение этой длины волны способно достичь цели и нагреть ее поверхность, которая является дополнительным источником акустических волн. Эти акустические волны также принимаются гидрофонами. Обработка информации с гидрофонов позволяет определить координаты цели, ее скорость и направление движения, а также осуществить сопровождение цели путем соответствующего перемещения или сканирования лазерного излучения. Технический результат заключается в повышении точности определения координат цели, и ее сопровождение. 6 з.п. ф-лы., 1 ил.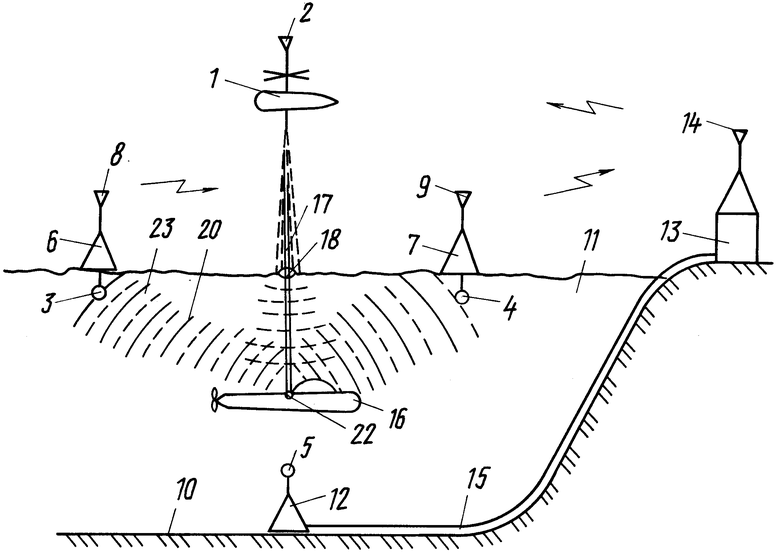
| US 5646907 A, 09.07.1997 | |||
| SU 1821773 A1, 15.06.1993 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2008692C1 |
| US 5161125 A, 03.11.1992 | |||
| WO 9411756 A1, 26.05.1994 | |||
| Урик Р | |||
| Дж | |||
| Основы гидроакустически | |||
| - Л.: Судостроение, 1978, с.26-27. | |||

