Текст описания в факсимильном виде (см. графическую часть).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2231820C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство управления положением диаграммы направленности антенны подвижного объекта | 1990 |
|
SU1805451A1 |
| УСТРОЙСТВО ДЛЯ ТРИГОНОМЕТРИЧЕСКОГО ПРЕОБРАЗОВАНИЯ | 1992 |
|
RU2039377C1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
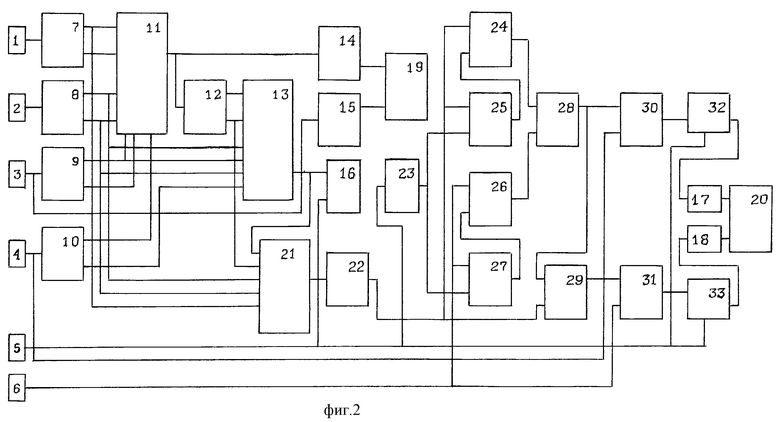
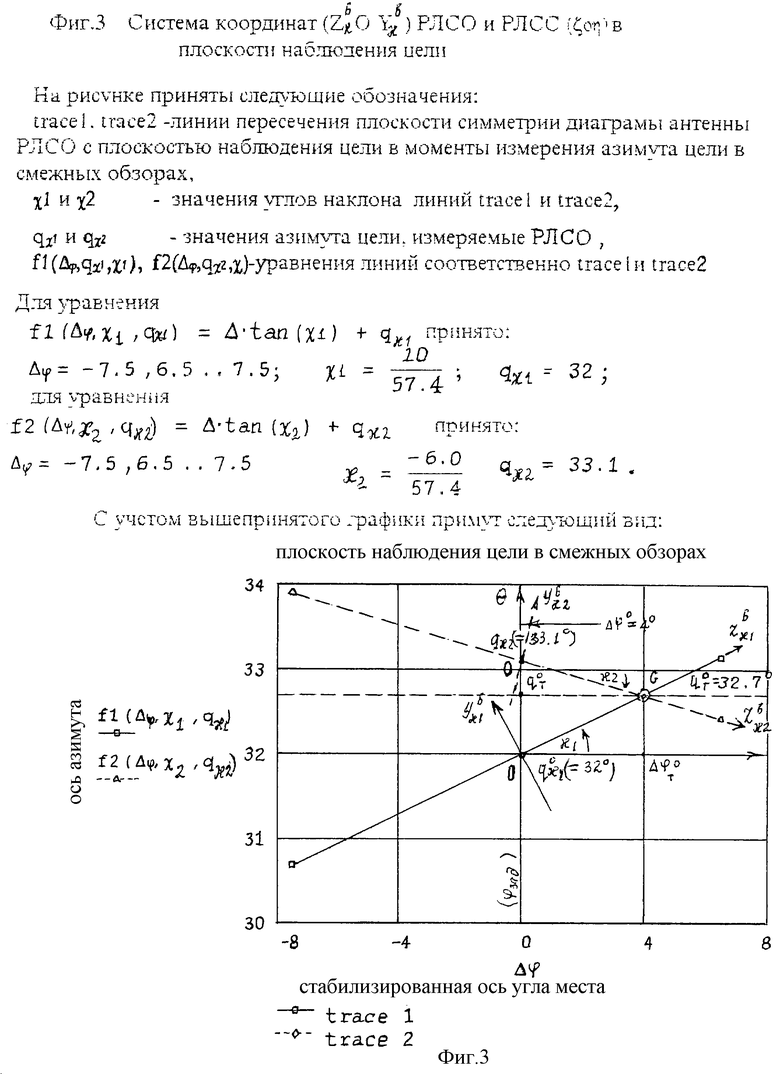
Изобретение относится к устройствам управления и стабилизации измерительных устройств на качающемся основании и может быть использовано для управления лучом антенны двухкоординатной мобильной РЛС обнаружения. Достигаемым техническим результатом изобретения является повышение точности формирования координат цели за счет введения компенсирующих поправок, электрической стабилизации положения плоскости симметрии диаграммы направленности антенны (перекрестия визира) в условиях отсутствия информации об отклонении цели от заданного угла места. Повышение точности достигается за счет того, что в устройство управления, содержащее датчики продольного и поперечного углов наклона, блоки задания угла места, азимута, блоки вычисления синуса и косинуса углов соответственно продольного и поперечного наклонов, задания азимута, угла места, угла места антенны, блоки формирования угла места антенны и азимута линии развертки, блок индикатора кругового обзора и вычисления азимута, приводы угла места и азимута с выходами, подключенными к антенне обнаружения, входы сигналов азимута цели и признака азимута цели, приводы сопровождения по углу места и азимуту с выходами, являющимися выходами устройства и предназначенными для подключения к антенне сопровождения, включен блок формирования угла наклона перекрытия, блок вычисления тангенса, блок задержки, первый, второй, третий и четвертый сумматоры, первый, второй, третий и четвертый блоки выборки и хранения, первый и второй блоки умножения. 3 ил.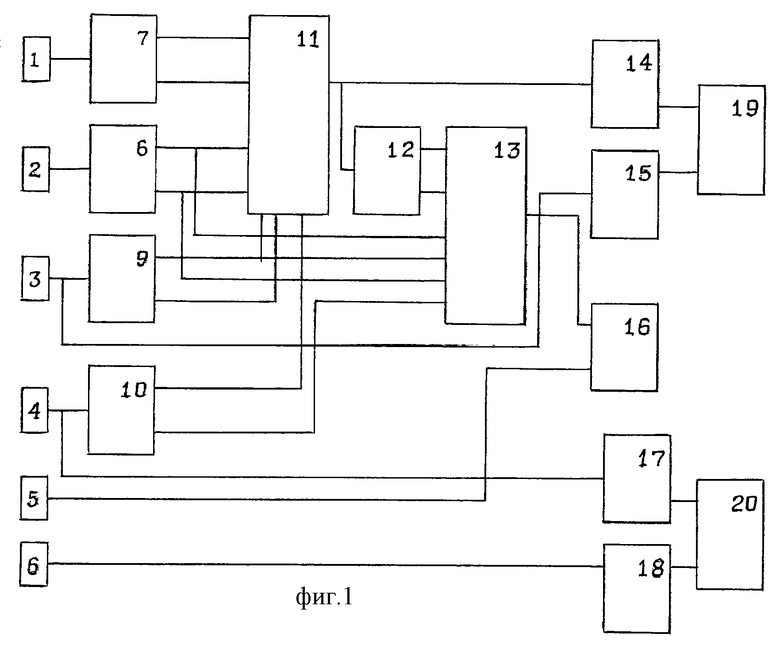
Устройство управления положением диаграммы направленности антенны мобильной РЛС обнаружения, содержащее датчик продольного и датчик поперечного углов наклона, блок задания азимута, блок задания угла места с последовательно подключенным к ним блоком вычисления синуса и косинуса углов соответственно продольного и поперечного наклонов, заданного азимута и заданного угла места, привод угла места, привод азимута, блок вычисления синуса и косинуса угла места антенны, блок формирования угла места антенны и блок формирования азимута линии развертки, блок индикатора кругового обзора и вычисления азимута, выход блока задания азимута подключен к входу привода азимута и входу сигнала азимута цели, причем синусный и косинусный выходы блока вычисления синуса и косинуса угла поперечного наклона, блока вычитания синуса и косинуса угла продольного наклона, блока вычисления синуса и косинуса угла заданного азимута, синусный выход блока вычисления синуса и косинуса заданного угла места подключены к входам блока формирования угла места антенны, выход которого подключен к входу привода угла места и входу блока вычисления синуса и косинуса угла места антенны, синусный и косинусный выходы блока вычисления синуса и косинуса угла поперечного наклона, блока вычисления синуса и косинуса угла места антенны, синусный выход блока вычисления синуса и косинуса угла заданного азимута, косинусный выход блока вычисления синуса и косинуса заданного угла места подключены к входам блока формирования азимута линии развертки, выход которого подключен к первому входу блока индикатора кругового обзора и вычисления азимута, второй вход которого подключен к входу сигнала признака азимута цели, выходы приводов угла места и азимута предназначены для подключения к антенне обнаружения, привод сопровождения по углу места, привод сопровождения по азимуту, выходы приводов сопровождения по углу места и азимуту являются выходами устройства, предназначенными для подключения к антенне сопровождения, отличающееся тем, что в него включен блок формирования угла наклона перекрестия, блок вычисления тангенса, блок задержки, первый, второй, третий и четвертый сумматоры, первый, второй, третий и четвертый блоки выборки и хранения, первый и второй блоки умножения, причем входы блока формирования угла наклона перекрытия подключены к соответствующим выходу блока формирования азимута линии развертки, к косинусному выходу блока вычисления синуса и косинуса угла места антенны, к синусному выходу блока вычисления синуса и косинуса угла поперечного наклона, к косинусному выходу блока вычисления синуса и косинуса угла поперечного наклона и к синусному выходу блока вычисления синуса и косинуса угла продольного наклона, выход блока формирования угла наклона перекрестия подключен к входу блока вычисления тангенса, выходы третьего и четвертого сумматоров подключены к первым входам соответственно третьего и четвертого блоков выборки и хранения, выходы которых подключены к приводу сопровождения по углу места и к приводу сопровождения по азимуту соответственно, вторые входы третьего и четвертого блоков выборки и хранения подключены к входу признака азимута цели, вторыми входами третьего и четвертого сумматоров являются соответственно выход блока задания угла места и вход сигнала азимута цели, а первые входы подключены к выходам соответственно первого и второго блоков умножения, первые входы которых подключены к выходам соответственно первого сумматора и первого блока умножения, а вторые входы – к выходам соответственно второго сумматора и блока вычисления тангенса, первыми входами первый сумматор и первый блок выборки и хранения подключены к выходу блока вычисления тангенсов, а вторыми входами - соответственно к выходу первого блока выборки и хранения и выходу блока задержки, вход которого подключен к входу сигнала признака азимута, первыми входами второй сумматор и второй блок выборки и хранения подключены к входу сигнала азимута цели, а вторыми входами – соответственно к выходу второго блока выборки и хранения и к выходу блока задержки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Воентехиниздат, 1990, изд | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| формуляр, ч.2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| RU 97120867 A, 20.11.1999 | |||
| US 5131602 A, 21.07.1992 | |||
| СПОСОБ И УСТРОЙСТВО ОТРИСОВКИ ГРАФИЧЕСКОГО ИНТЕРФЕЙСА ПОЛЬЗОВАТЕЛЯ | 2015 |
|
RU2659731C2 |

