Изобретение относится к устройствам управления и стабилизации измерительных устройств на качающемся основании и может использоваться для управления лучом антенны радиолокационной станции (РЛС), имеющей две степени свободы.
Цель изобретения - повышение точности управления антенной по углу места при любых продольных и поперечных наклонах объекта.
Рассмотрим задачу преобразования координат.
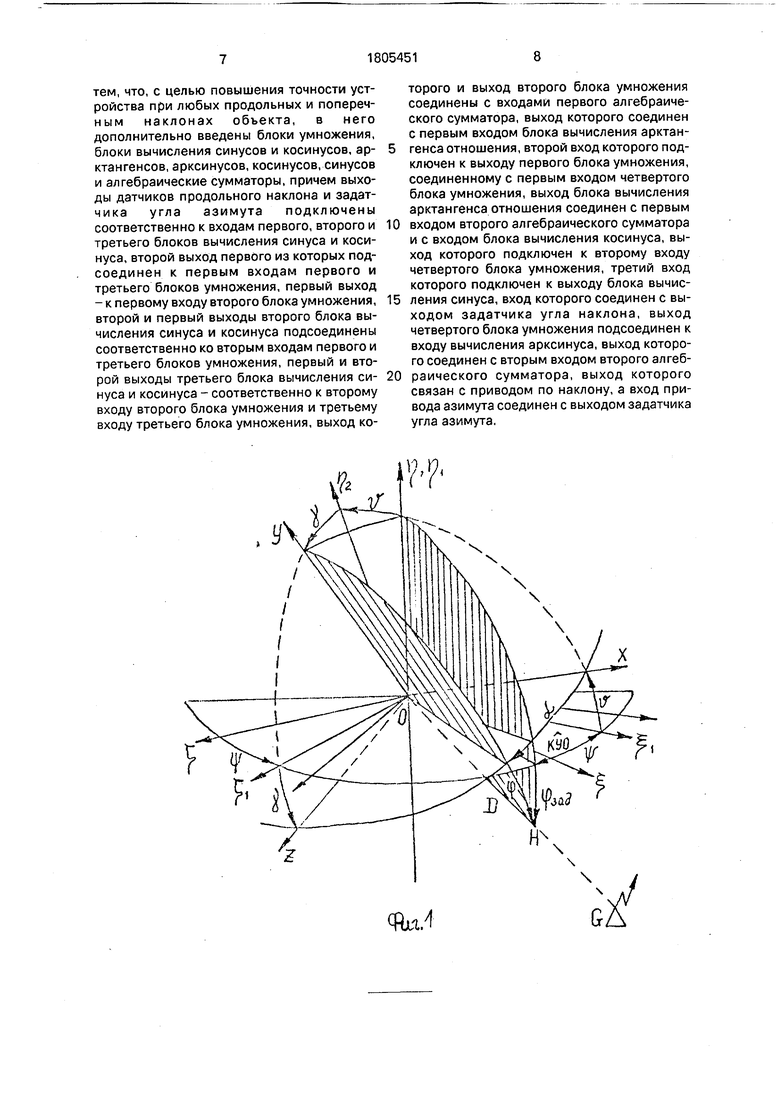
На фиг. 1 показаны инерциальная (земная) система координат и система координат OXYZ, связанная с подвижным объектом. Взаимное положение осей О | г Ј и OXYZ определяется с помощью углов , в, у. Полагаем, что ось диаграммы направленности антенны РСЛ совмещена с ориентиром G. Тогда положение ориентира относительно системы координат OXYZ характеризуется двумя углами: а- курсовым углом ориентира в плоскости OXYZ и р- углом наклона. Введем систему координат О Јi 771 Ј1 , полученную поворотом системы of /Ј на Угол V относительно оси 0)/. Преобразование координат из системы OXYZ к системе 0 Ј1 /i Ј1 задается с помощью матрицы направляющих косинусов
COS V- Sin 19-COSy 5iYmSinЈ Stnl -CQ57fsin 05inV COS.
(D
Зная матрицу (1), определим связь между координатами (р , а и KYO, Ззад - соответственно, курсовым углом ориентира и углом места ориентира. Для этого воспользуемся методом аналитической геометрии. Обозначим единичный вектор ОН направления на ориентир G через D. Найдем проекции вектора D на оси Ј1, r, Јr. D. cos(KYO)cos рзад; D Sin D;/ sin(KYO)cos найдем проекции вектора D на оси X, Y, Z:
Dx cos a cos р ; DY sin p ; DZ sin
Учитывая матрицу перехода от системы координат OXYZ к системе 0 Ј1J/1 Ј1 (1), можно записать
Јi,/i, ,Y, или, подставив в уравнение значения координат вектора D0
COST -sinu-c sj1 sinvsin/г
5 inV COSVCOSf -COStfslnjf
0slnjf cos
cosotcoscp sintp
Sinoi COStf
Перемножив матрицы, получим систему уравнений:
cos(kyo co64 v;i «co5vcosoccoa -sinvcosj5mt t einveinj1 Sin «.cosif
smtf jrjinijcosticosqucoswcoej emq -cosw- eln j1 sind, cos (f eintKaOlcosifja smj SinqtcosJsinoicoscf.
Формулу для расчета угла наклона, поворот на который стабилизирует ось диаграммы
направленности под углом к горизонтальной плоскости, равным Зад, получим из второго уравнения системы (2), разрешив его, используя известные соотношения тригонометрии относительно р:
y arcsin(sin 7COSC)-C.(3)
где А cos# cosy; 8 cosasin0- -sin a cos 0 sin у; C arctg(B/A).
При известных углах рзац и р , KYO, выдаваемый на индикатор, можно вычислять по формуле, получаемой из третьего уравнения системы (2):
KYO arcsin(F),
где
0
5
Р sin у sin (р + cos у sin a cos p
COS зад
Поставленная цель изобретения достигается тем, что в устройстве управления положением диаграммы направленности антенны подвижного объекта, основанном на косвенной стабилизации антенны, содержащем привод по углу азимута а, привод по углу наклона (р на вход которого подается сигнал, получаемый преобразованием сигналов с датчиков продольного и поперечного наклонов объекта, задатчиков угла а и
0 угла заданного наклона зад, новым является то, что выходы задатчика угла сканирова- ния a , датчиков продольного и поперечного наклонов подвижного объекта соединены с входами блоков вычисления
синусов и косинусов, выходы этих блоков соединены со входами трех блоков умножения, в первом блоке умножения перемножаются cos0ncosy,BO втором cosctMSinfl,в третьем
Q sin a, cos 0 и sin у, выходы второго и третьего блоков подключены ко входу сумматора, выходы сумматора и первого блока умножения соединены со входами блока вычисления арктангенса их отношения, выход блока
5 арктангенса соединен со входом блока вычисления косинуса, выход задатчика угла наклона соединен со входом блока вычисления синуса, выходы блока вычисления синуса, блока вычисления косинуса, первого блока умножения соединены со входами
четвертого блока умножения, выход которого соединен с блоком вычисления арксинусов, выход которого и выход блока арктангенса соединены со входами второго сумматора, выход сумматора соединен с входом привода антенны по углу наклона р, вход привода антенны по углу азимута а соединен с выходом задатчика угла а, приводы поворачивают антенну в положение, соответствующее сигналам на их входах, тем самым стабилизируя положение диаграммы направленности.
Авторами выявлено применение блоков, из которых состоит устройство, в различных областях техники. Однако их совокупное применение и взаимосвязи в предлагаемом устройстве позволяют получить новое качество системы косвенной стабилизации антенны подвижного объекта, заключающееся в точной стабилизации оси диаграммы направленности в пространстве при любых величинах углов продольного и бокового наклона подвижного объекта. Следовательно, техническое решение соответствует критерию существенные отличия.
На фиг. 1 представлены системы координат, в которых стабилизируется и управляется антенна; на фиг. 2 - структурная схема, реализующая способ, где 1,2- соответственно датчики продольного и поперечного наклонов подвижного объекта; 3, 4 - соответственно задатчики углов азимута и наклона; 5, 6, 7 - блоки вычисления синусов и косинусов; 8 - блок вычисления синусов; 9, 10, 11, 14 - блоки умножения; 12, 17 - сумматоры; 13 - блок вычисления арктангенса; 15-блок вычисления косинусов; 16- блок вычисления арксинуса; 18, 19 - соответственно приводы антенны по наклону и азимуту; 20 - антенна.
Устройство работает следующим образом.
В процессе эволюции носителя, на котором установлена антенна, возникающие при этом продольные и поперечные отклонения от установившегося состояния меняют положение диаграммы направленности в пространстве. Для возвращения луча в прежнее положение формируют сигнал, пропорциональный углам наклона носителя, разворота антенны по азимуту и заданному углу наклона. С этой целью сигналы с датчиков продольного 1 и поперечного 2 наклона носителя, задатчика угла азимута 3 подаются соответственно на блоки вычисления синусов и косинусов 5, 6,7, на выходе которых снимаются сигналы, пропорциональные синусам и косинусам этих углов.
Сигналы с блоков 5, 6, 7 подаются в блоки умножения 9,10,11, реализованные, например, на умножителях типа 525ПС2, в которых вычисляются, соответственно
А cos в cos у, D cos a sin в,
Е sin «cos 0sin у.
Сигналы с выходов блоков 10, 11 подаются на сумматор 12, на выходе которого получают их разность, сигнал, пропорциональный
этой разности, и сигнал с выхода блока умножения 9 подаются в блок вычисления арктангенса 13, осуществляющий операцию
D
С arctg -д-, сигнал с выхода блока арктангенса 13 подается на вход блока вычисления косинуса 15. Сигнал с задатчика угла наклона 4 подается в блок вычисления синуса, выходной сигнал которого, а также сигналы с выходов блока умножения 9 и блока вычисления косинуса 15 подаются в блок умножения 14, осуществляющий операцию
(sin рзад cos С)/А
Выходной сигнал с блока 14 подается в блок вычисления арксинуса, выход которого и выход блока 13 подаются на сумматор 17, где вычисляется их разность. Сигнал с выхода сумматора 17 подается на следящий привод по углу наклона 18, а сигнал с задатчика угла азимута подается на следящий привод 19.
Приводы отрабатывают заданные углы и антенна 20 устанавливается в положение, стабилизирующее диаграмму направленности.
Преимуществом предлагаемого устройства по сравнению с известными является точная стабилизация оси диаграммы направленности антенны в заданном пространственном положении при любых величинах углов продольного и поперечного
наклонов носителя.
Экономический эффект образуется за счет точной стабилизации диаграммы направленности, позволяющей точнее определять координаты ориентиров, а следовательно, сокращать длину пути
транспортного средства за счет более точной навигации (спрямление траекторий полета).
Формула изобретения Устройство управления положением диаграммы направленности антенны подвижного объекта, содержащее привод по углу азимута и привод по углу наклона, выходы которых являются выходами устройства, датчики продольного и поперечного наклона объекта, задатчики угла азимута и заданного наклона, входы которых являются входами устройства, отличающееся
тем, что, с целью повышения точности устройства при любых продольных и попереч- ным наклонах объекта, в него дополнительно введены блоки умножения, блоки вычисления синусов и косинусов, арктангенсов, арксинусов, косинусов, синусов и алгебраические сумматоры, причем выходы датчиков продольного наклона и задат- чика угла азимута подключены соответственно к входам первого, второго и третьего блоков вычисления синуса и косинуса, второй выход первого из которых подсоединен к первым входам первого и третьего блоков умножения, первый выход - к первому входу второго блока умножения, второй и первый выходы второго блока вычисления синуса и косинуса подсоединены соответственно ко вторым входам первого и третьего блоков умножения, первый и второй выходы третьего блока вычисления синуса и косинуса - соответственно к второму входу второго блока умножения и третьему входу третьего блока умножения, выход которого и выход второго блока умножения соединены с входами первого алгебраического сумматора, выход которого соединен с первым входом блока вычисления арктангенса отношения, второй вход которого подключен к выходу первого блока умножения, соединенному с первым входом четвертого блока умножения, выход блока вычисления арктангенса отношения соединен с первым
входом второго алгебраического сумматора и с входом блока вычисления косинуса, выход которого подключен к второму входу четвертого блока умножения, третий вход которого подключен к выходу блока вычисления синуса, вход которого соединен с выходом задатчика угла наклона, выход четвертого блока умножения подсоединен к входу вычисления арксинуса, выход которого соединен с вторым входом второго алгебраического сумматора, выход которого связан с приводом по наклону, а вход привода азимута соединен с выходом задатчика угла азимута,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО НАВЕДЕНИЯ ДВУХОСНОГО ГИРОСТАБИЛИЗАТОРА | 2013 |
|
RU2532242C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2231820C2 |
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| БОРТОВОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1991 |
|
RU2027200C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
RU1797300C |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2220436C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СТОЯНОЧНОГО КУРСА ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
SU1835933A1 |
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
Изобретение относится к устройствам управления и стабилизации измерительных устройств на качающемся основании и может быть использовано для управления лучом антенны радиолокационной станции. Целью изобретения является повышение точности устройства при любых продольных и поперечных наклонах объекта. Устройство содержит датчики продольного и поперечного наклона (1, 2), задатчики угла азимута и угла наклона (3, 4), три блока вычисления синуса и косинуса (5, 6, 7), четыре блока умножения (9,10,11,14), два сумматора (12, 17), блок вычисления синуса (6), блок вычисления арктангенса отношения (13), блок вычисления арксинуса (16), блок вычисления косинуса (15), приводы по наклону и азимуту 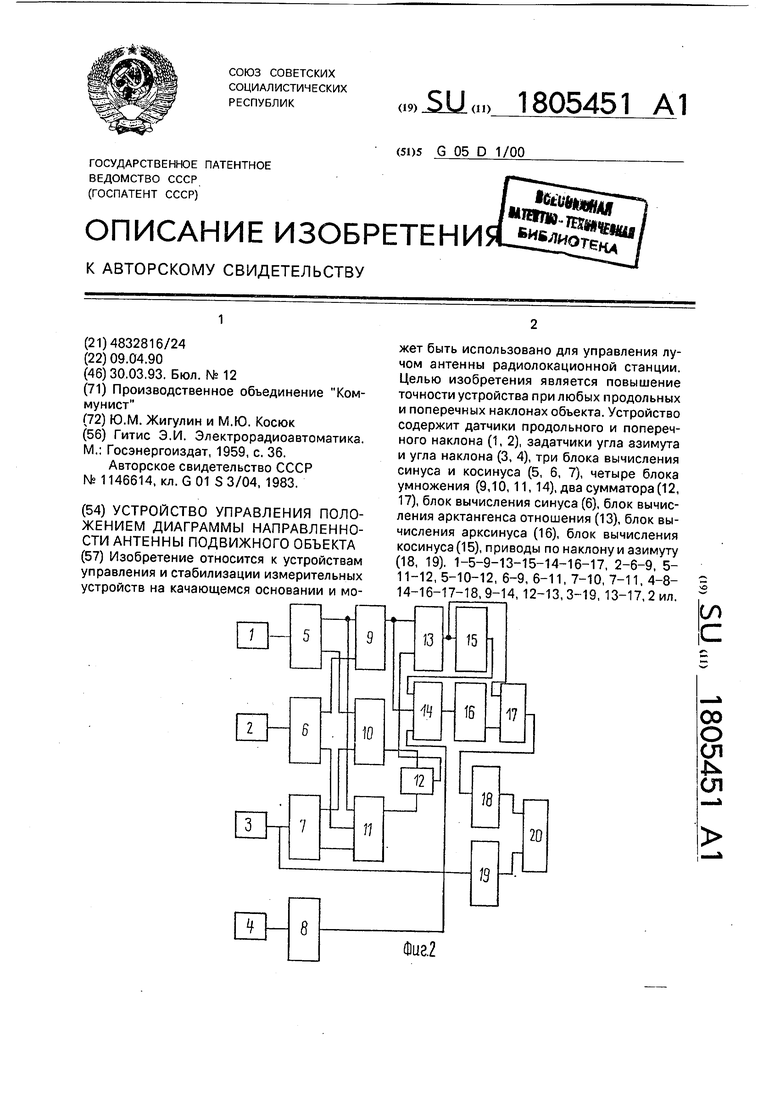
| Гитис Э.И | |||
| Электрорадиоавтоматика | |||
| М.: Госэнергоиздат, 1959, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Устройство управления положением антенны для подвижного объекта | 1983 |
|
SU1146614A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
