Изобретение относится к способам прицеливания при пуске управляемой ракеты (УР) класса "воздух-воздух" ("в-в") и может быть использовано при создании новых и модернизации существующих прицельных систем самолетов-истребителей.
Известен способ прицеливания при пуске УР "в-в" [1], который состоит в том, что предварительно рассчитывают границы баллистической области возможного пуска (БОВП) УР "в-в" и в вычислитель прицельной системы истребителя вводят зависимости границ БОВП от высоты и скорости истребителя, курсового угла и скорости цели и запоминают эти зависимости в этом вычислителе. В процессе атаки цели на истребителе измеряют значения Ни высоты и Vи скорости его полета и текущей дальности Диц между целью и истребителем, определяют значения Qц курсового угла и Vц скорости цели и выполняют целеуказание системе управления УР. Значения Ни, Vи, Qц, Vц вводят в этот вычислитель, вычисляют значение угла упреждения и выполняют маневр истребителя по отработке этого угла. В этом вычислителе с использованием значений Ни, Vи, Qц, Vц и предварительно введенных зависимостей вычисляют значения максимальной Дmахб и минимальной Дminб границ БОВП в условиях атаки цели. Значения Дmахб, Дminб и Диц индицируют экипажу истребителя, который при условии Дminб<Диц<Дmахб принимает решение о пуске этой УР и при этом формирует сигнал Uп, который подают на вход исполнительного устройства, осуществляющего пуск этой УР. Недостатком этого способа является возможность неэффективного пуска этой УР, так как при расчете границ БОВП не учитывают метод наведения УР и характеристики ее системы управления и взрывателя, работа которых обеспечивает поражение цели.
Известен также способ прицеливания при пуске УР "в-в" [2], который состоит в том, что предварительно методом проб вычисляют границы области возможного пуска УР при применении этой УР по не маневрирующей цели, аппроксимируют эти границы аналитическими зависимостями от высоты и скорости полета истребителя, пеленга цели и скорости сближения истребителя с целью, вводят эти зависимости в вычислитель прицельной системы истребителя и запоминают их в этом вычислителе. В процессе атаки цели на истребителе измеряют значения Ни высоты и Vи скорости его полета, Vиц скорости сближения его с целью и Диц текущей дальности между целью истребителем, вводят значения Ни, Vи, Vиц в этот вычислитель, определяют пеленг Пц цели, выполняют целеуказание системе управления УР, вычисляют значение угла упреждения, выполняют маневр истребителя по отработке этого угла. С использованием значений Ни, Vи, Vиц, Пц и введенных предварительно зависимостей в этом вычислителе вычисляют значения максимальной Дmах и минимальной Дmin границ области возможного пуска (ОВП) этой УР, значения Дmах, Дmin и Диц индицируют экипажу истребителя, который при условии Дmin<Диц<Дmах принимает решение о пуске этой УР и при этом формирует сигнал Uп, который подают на вход исполнительного устройства, осуществляющего пуск УР. Недостатком этого способа является возможность такого пуска этой УР по маневрирующей цели, при котором не обеспечивается поражение этой цели, что приведет к неэффективному расходу этих дорогостоящих УР.
Прототипом заявляемого изобретения следует считать способ прицеливания при пуске УР "в-в" [2], общими признаками которого с заявляемым изобретением является то, что в процессе атаки цели на истребителе измеряют значения Ни высоты и Vи скорости его полета, Диц текущей дальности между целью и истребителем и Vиц скорости сближения истребителя с целью, вводят эти значения в вычислитель прицельной системы истребителя, выполняют целеуказание системе управления УР, вычисляют значение угла упреждения, выполняют маневр истребителя по отработке этого угла, с использованием значений Ни, Vи, Vиц вычисляют значения максимальной Дmах и минимальной Дmin границ ОВП этой УР, индицируют значения Дmах, Дmin и Диц экипажу истребителя, который при условии Дmin<Диц<Дmах принимает решение о пуске этой УР и при этом формирует сигнал Uп, который подают на вход исполнительного устройства, осуществляющего пуск УР.
Кроме того, в прототипе предварительно методом проб вычисляют границы ОВП УР при применении по не маневрирующей цели, аппроксимируют эти границы аналитическими зависимостями от высоты и скорости полета истребителя, скорости сближения истребителя с целью и пеленга цели, вводят эти зависимости в этот вычислитель и запоминают их в нем, а в процессе атаки цели на истребителе определяют пеленг Пц цели, который, а также предварительно введенные в этот вычислитель зависимости используют при вычислении значений Дmах и Дmin.
Недостатком прототипа является возможность такого пуска этой УР по маневрирующей цели, при котором не обеспечивается поражение этой цели, что приведет к неэффективному расходу этих дорогостоящих УР. Это объясняется следующим. Как известно ([1], стр.386), поражение цели обеспечивается только при пуске УР из ОВП. Известно ([2], стр.361), что при маневре цели ОВП существенно деформируется по сравнению с ОВП по не маневрирующей цели. Поэтому в ОВП по не маневрирующей цели есть зоны, при пуске УР из которых не обеспечивается поражение маневрирующей цели. На рис.11.2 ([2], стр.360) такими зонами являются зоны между границами ОВП по не маневрирующей цели, которые изображены сплошными линиями, и границами ОВП по маневрирующей цели, изображенными пунктирными линиями, в которых максимальная граница ОВП по не маневрирующей цели больше максимальной границы ОВП по маневрирующей цели или минимальная граница ОВП по не маневрирующей цели меньше минимальной границы ОВП по маневрирующей цели. Так как в прототипе на истребителе вычисляют и индицируют экипажу только границы ОВП по не маневрирующей цели, то при атаке маневрирующей цели экипаж истребителя может произвести пуск УР из этих, указанных выше зон. Поскольку эти зоны не принадлежат ОВП по маневрирующей цели, то при пуске УР по маневрирующей цели из этих зон поражение этой цели не обеспечивается и в этом случае дорогостоящие УР будут израсходованы попусту.
Целью изобретения является устранение указанного недостатка прототипа, а именно исключение возможности такого пуска этих УР, при котором не обеспечивается поражение маневрирующей цели.
Достигается эта цель тем, что предварительно в вычислитель прицельной системы истребителя вводят алгоритм расчета границ ОВП оперативным методом, а также заданные потребные значения характеристик УР, ее системы управления и взрывателя и заданное значение Nцmах максимально возможной перегрузки маневра цели и запоминают этот алгоритмы и эти значения в этом вычислителе, в процессе атаки цели на истребителе дополнительно измеряют значение угловой скорости Uд вращения вектора дальности между истребителем и целью и это значение вводят в этот вычислитель, в котором вычисляют значения скорости Vц и курсового угла Qц цели, с использованием которых и предварительно введенных значений характеристик УР, ее системы управления и взрывателя, а также предварительно введенного этого алгоритма вычисляют значения максимальной Дmахо и минимальной Дmino границ ОВП при применении УР по не маневрирующей цели, а также значения максимальной Дmахn и минимальной Дminn границ ОВП при применении УР по маневрирующей цели, сравнивают между собой значения Дmахо и Дmахn, и, если Дmахо>Дmахn, то значение Дmах максимальной границы ОВП принимают равным Дmахn, а, если Дmахо <Дmахn, то значение Дmах принимают равным Дmахо, сравнивают между собой значения Дmin и Дminn, и, если Дmino>Дminn, то значение Дmin минимальной границы ОВП принимают равным Дminо, а, если Дminо<Дminn, то значение Дmin принимают равным Дminо, в этом вычислителе сравнивают также значение Диц с значениями Дmах и Дmin и при условии, что Дmin<Диц<Дmах, формируют электрический сигнал Uи, который подают на другой вход исполнительного устройства, и осуществляют пуск этой УР только при наличии на входах этого устройства сигналов Uи и Uп.
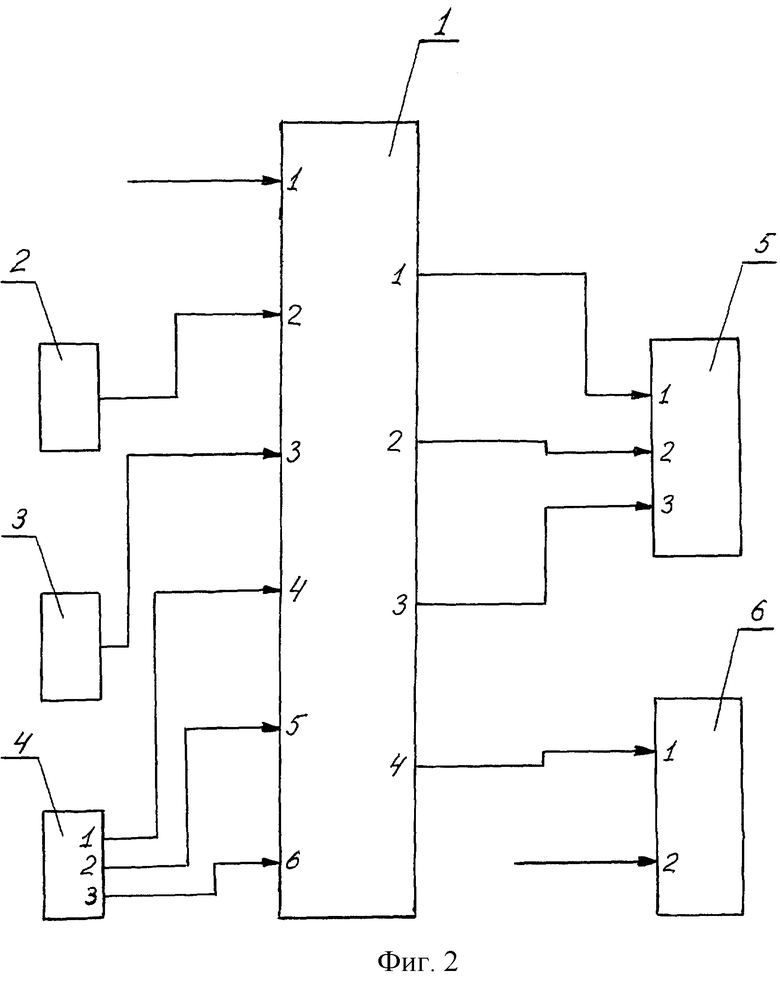
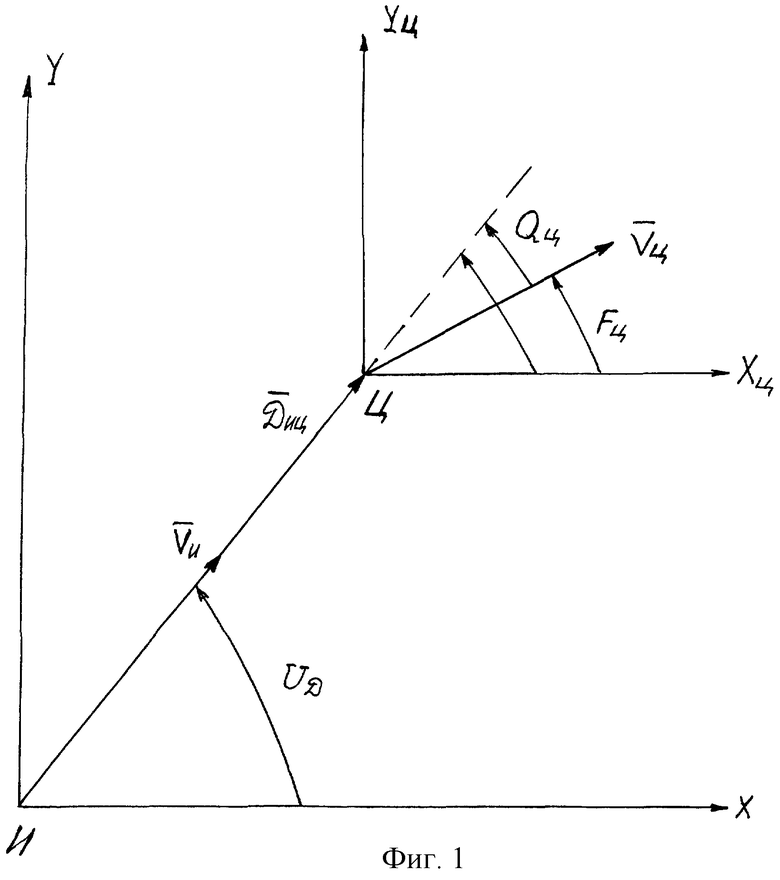
Существо предлагаемого способа поясняется схемами, изображенными на чертежах фиг.1 и фиг.2. На фиг.1 изображена схема взаимного положения в плоскости истребителя и цели в процессе атаки цели при наведении истребителя на цель по методу "погони". На фиг.2 изображена блок-схема возможного варианта устройства, реализующего предложенный способ.
На фиг.1 обозначено: И - точка, в которой в рассматриваемый момент времени находится истребитель; Ц - точка, в которой в рассматриваемый момент времени находится цель; ИХY - прямоугольная система координат с началом в точке И; ЦХцYц - прямоугольная система координат с началом в точке Ц, ось ЦХц которой параллельна оси ИХ, а ось ЦYц параллельна оси ИY;  иц - вектор дальности между истребителем и целью;
иц - вектор дальности между истребителем и целью;  и - вектор скорости истребителя;
и - вектор скорости истребителя;  ц -вектор скорости цели; Uд, Fц - углы ориентации соответственно векторов
ц -вектор скорости цели; Uд, Fц - углы ориентации соответственно векторов  иц и
иц и  ц; Qц - курсовой угол цели.
ц; Qц - курсовой угол цели.
На фиг.2 обозначено: 1 - вычислитель прицельной системы истребителя (В); 2 - измеритель высоты (ИВ); 3 - измеритель скорости (ИС); 4 - радиолокатор, следящий за целью (СЛ); 5 - индикаторное устройство (ИУ); 6 - исполнительное устройство (ИСУ). В блоках, имеющих более одного входа (выхода), соответствующие входы (выходы) пронумерованы.
Существо предлагаемого способа состоит в следующем. Предварительно в вычислитель прицельной системы истребителя вводят известный алгоритм расчета границ ОВП УР оперативным методом (Григорьев В.Г., Григорьев Д.В., Григорьев В.В., "Способ определения границ области возможного пуска ракеты". Патент РФ N 2206044, зарегистрирован в Государственном реестре изобретений Российской Федерации 10 июня 2003 г.). В этом методе границы ОВП УР вычисляют по аналитическим выражениям, полученным в результате аналитического решения системы дифференциальных уравнений, описывающих процесс наведения УР на цель по траектории, которая характеризуется выполнением связи метода наведения и условий бессрывности наведения ракеты и срабатывания ее взрывателя. Использование этого метода позволяет при малых затратах времени работы этого вычислителя с достаточной точностью вычислить границы ОВП УР при равных значениях перегрузки Nц маневра цели от Nц=0 до максимально возможного Nцmax значения этой перегрузки. Кроме того, предварительно вводят в этот вычислитель значения характеристик УР, ее системы управления и взрывателя, потребные для расчетов по этому алгоритму, а также значение Nцmах. В процессе атаки цели наводят истребитель на цель, например, методом "погони", при котором пилотируют истребитель так, чтобы вектор Vи его скорости был направлен на цель, измеряют на истребителе значения Vи и высоты Ни его полета, скорости Vиц сближения истребителя с целью, модуля Диц вектора дальности между истребителем и целью и угловой скорости Uд вращения этого вектора. Эти значения вводят в этот вычислитель, в котором вычисляют значения Vц скорости цели и Qц курсового угла цели по следующему алгоритму


разработанному на основе выражений
Vиц=-Vи+Vц·cos(Qц),
Диц·Uд=-Vц·sin(Qц),
полученных в результате анализа схемы (фиг.1). Используя значения Ни, Vи и предварительно введенные в вычислитель значения характеристик УР, по предварительно введенному алгоритму вычисляют значение Vд дополнительной скорости, которую приобретет УР за время работы ее двигателя, а по формуле

вычисляют значение Y утла упреждения, потребного при пуске УР, и выполняют маневр истребителя по отработке этого угла.
Кроме того, используя значения Ни, Vи, Vц, Qц, Nцmax и предварительно введенные в вычислитель значения характеристик УР, ее системы управления и взрывателя, по предварительно введенному в вычислитель алгоритму расчета границ ОВП УР оперативным методом вычисляют значения максимальной Дmахо и минимальной Дminо границ ОВП при применении УР по не маневрирующей цели (Nц=0), а также значения максимальной Дmахn и минимальной Дminn границ ОВП при применении УР по цели, которая маневрирует с перегрузкой Nцmах. Затем в этом вычислителе сравнивают между собой значения Дmахо и Дmахn и в результате этого сравнения вычисляют значение Дmax максимальной границы ОВП УР по следующему алгоритму. Если

а если

Одновременно сравнивают между собой значения Дmino и Дminn и в результате этого сравнения вычисляют значение Дmin минимальной границы ОВП УР по следующему алгоритму. Если

а если

Полученные значения Дmах и Дmin, а также значение Диц текущей дальности между истребителем и целью индицируют экипажу истребителя. В результате анализа этой индицируемой информации экипаж истребителя принимает решение о пуске УР при выполнении условия

и при этом формирует электрический сигнал Uп, который подают на один вход исполнительного устройства, предназначенного для осуществления пуска УР.
Кроме того, при выполнении условия (8) в этом вычислителе формируют электрический сигнал Uи, который подают на другой вход этого исполнительного устройства, осуществляющего пуск УР только при наличии сигналов Uи и Uп на обоих его входах. Если же условие (8) не выполняется, т.е. при

или при

то сигнал Uи не формируется и при подаче на исполнительное устройство сигнала Uп пуск УР не происходит.
Таким образом, в заявляемом способе в вычислителе прицельной системы истребителя оперативным методом вычисляют значения максимальной Дmахо и минимальной Дmino границ ОВП при применении УР по не маневрирующей цели и максимальной Дmахn и минимальной Дminn границ ОВП при применении УР по маневрирующей цели. В результате анализа этих значений максимальную Дmах границу ОВП, которую индицируют экипажу истребителя, вычисляют по выражениям (4) и (5), а минимальную Дmin границу этой ОВП УР вычисляют по выражениям (6) и (7). Экипажу истребителя для принятия решения о пуске УР и формирования при этом электрического сигнала Uп, подаваемого на исполнительное устройство, индицируют границы такой ОВП, при пуске УР из которой обеспечивается поражение как не маневрирующей, так и маневрирующей цели. Кроме того, только в том случае, если истребитель находится в границах этой ОВП (выполнение условия (8)), в этом вычислителе формируют электрический сигнал Uи, который подают на другой вход этого исполнительного устройства, осуществляющего пуск УР только при наличии сигналов Uи и Uп на его входах. Таким образом, в предлагаемом способе исключена возможность такого пуска УР, при котором не обеспечивается поражение маневрирующей цели, что доказывает достижение заявленной цели изобретения.
В состав возможного варианта устройства (фиг.2), реализующего заявляемый способ, входят В 1, ИВ 2, ИС 3, СЛ 4, ИУ 5, ИСУ 6, причем первый вход В 1 электрически связан выходом устройства предварительного ввода информации в В 1, второй вход В 1 электрически связан с выходом ИВ 2, третий вход В 1 электрически связан с выходом ИС 3, четвертый вход В 1 электрически связан с первым выходом СЛ 4, пятый вход В 1 электрически связан со вторым выходом СЛ 4, шестой вход В 1 электрически связан с третьим выходом СЛ 4, первый выход В 1 электрически связан с первым входом ИУ 5, второй выход В 1 электрически связан со вторым входом ИУ 5, третий выход В 1 электрически связан с третьим входом ИУ 5, четвертый выход В 1 электрически связан с первым входом ИСУ 6, а второй вход ИСУ 6 электрически связан с выходом устройства формирования экипажем истребителя сигнала Uп на пуск УР.
Работает это устройство следующим образом. Предварительно на первый вход В 1 с выхода устройства предварительного ввода информации подают алгоритм расчета границ ОВП оперативным методом, потребные для этого расчета значения характеристик УР, ее системы управления и взрывателя, а также заданное значение Nцmax и запоминают в В 1 эти алгоритмы и значения. В процессе атаки цели на истребителе измеряют:
- значение Ни высоты его полета (посредством ИВ 2);
- значение Vи скорости его полета (посредством ИС 3);
- значения Vиц скорости сближения истребителя с целью, Диц модуля вектора дальности между истребителем и целью и Uд угловой скорости вращения этого вектора (посредством СЛ 4). Значение Ни с выхода ИВ 2 подают на второй вход В 1, значение Vи с выхода ИС 3 подают на третий вход В 1, значение Vиц с первого выхода СЛ 4 подают на четвертый вход В 1, значение Диц со второго выхода СЛ 4 подают на пятый вход В 1, а значение Uд с третьего выхода СЛ 4 подают на шестой вход В 1. С использованием этих значений в В 1 вычисляют:
- значения Vц скорости цели и Qц курсового угла цели по алгоритму (1). (2);
- значение Vд дополнительной скорости УР по предварительно введенному в В 1 алгоритму;
- значение Y угла упреждения по формуле (3);
- значения максимальной Дmахо и минимальной Дmino границ ОВП при УР по не маневрирующей цели и значения максимальной Дmахn и минимальной Дminn границ ОВП УР по цели, маневрирующей с перегрузкой Nцmах, по предварительно введенному в В 1 алгоритму. В вычислителе В 1 с использованием значений Дmахо и Дmахn в соответствии с алгоритмом (4), (5) определяют значение Дmax максимальной границы ОВП УР, а с использованием значений Дmino и Дminn в соответствии с алгоритмом (6), (7) определяют значение Дmin минимальной границы ОВП УР. Значения Дmах и Дmin с первого и второго выходов В 1 соответственно подают на первый и второй входы ИУ 5, а с третьего выхода В 1 значение Диц подают на третий вход ИУ 5, в котором индицируют эти значения экипажу истребителя. Наблюдая на ИУ 5 эти значения, экипаж истребителя при выполнении условия (8) принимает решение о пуске УР и формирует при этом электрический сигнал Uп на пуск УР, который с выхода устройства формирования этого сигнала подают на второй вход ИСУ 6. Также в В 1 сравнивают значение Диц с значениями Дmах и Дmin и при выполнении условия (8) в течение всего времени его выполнения в В 1 формируют электрический сигнал Uи, который с четвертого выхода В 1 подают на первый вход ИСУ 6, и когда на второй вход ИСУ 6 подают сигнал Uи, ИСУ 6 осуществляет пуск УР. Если же условие (8) не выполняется, то в В 1 не формируют сигнал Uи, он не поступает на первый вход ИСУ 6 и пуск УР не происходит.
Источники информации
1. Балдов А.В., Григорьев В.Г., Жирных Г.А., Чумаков В.А./Под ред. В.А.Чумакова, "Авиационные ракеты", - ВВИА им. проф. Н.Е.Жуковского, 1974 г., стр.386-399.
2. И.Е.Казаков, А.Ф.Мишаков, "Авиационные управляемые ракеты", часть 2. - ВВИА им. проф. Н.Е.Жуковского, 1985 г., стр.356-364.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ОБЛАСТИ ВОЗМОЖНОГО ПУСКА РАКЕТЫ | 2001 |
|
RU2206044C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
Изобретение относится к управляемым ракетам класса "воздух-воздух", в частности, к их прицеливанию при пуске. Сущность изобретения заключается в том, что предварительно в вычислитель прицельной системы истребителя вводят и запоминают алгоритм расчета границ области возможного пуска управляемой ракеты оперативным методом, значения ее потребных характеристик и систем и заданную перегрузку маневра цели. В полете на истребителе измеряют потребные параметры его движения и сближения с целью. Вычисляют максимальную и минимальную границы области возможного пуска по не маневрирующей и маневрирующей цели. Сравнивают указанные границы и определяют их максимальные и минимальные значения, при которых обеспечивается поражение как не маневрирующей, так и маневрирующей цели. Пуск управляемой ракеты осуществляют при наличии двух сигналов, один из которых подается на вход исполнительного устройства при нахождении цели в области возможного пуска, а другой формируется экипажем истребителя с учетом указанного выше условия. Использование изобретения позволяет повысить надежность поражения цели. 2 ил.
Способ прицеливания при пуске управляемой ракеты класса "воздух-воздух", который состоит в том, что в процессе атаки цели на истребителе измеряют значения Ни высоты и Vи скорости его полета, Диц модуля вектора дальности от истребителя до цели и Vиц скорости сближения истребителя с целью, вводят эти значения в вычислитель прицельной системы истребителя, выполняют целеуказание системе управления этой ракеты, вычисляют значение угла упреждения, выполняют маневр истребителя по отработке этого угла, индицируют значения Диц, максимальной Дmах и минимальной Дmin границ области возможного пуска этой ракеты экипажу истребителя, который сравнивает Диц с Дmах и Дmin, и при условии, что значение Диц не меньше Дmin и не больше Дmах принимает решение о пуске этой ракеты и формируют при этом сигнал Uп, который подают на вход исполнительного устройства, осуществляющего пуск этой ракеты, отличающийся тем, что предварительно в этот вычислитель вводят алгоритм расчета границ этой области оперативным методом, потребные значения характеристик этой ракеты, ее системы управления и взрывателя, и заданное значение Nцmах максимально возможной перегрузки маневра цели и запоминают этот алгоритм и эти значения в этом вычислителе, в процессе атаки цели на истребителе дополнительно измеряют значение Uд угловой скорости вращения этого вектора, вводят это значение в этот вычислитель, где вычисляют значения Vц скорости и Qц курсового угла цели, а с использованием значений Vц, Qц, Ни, Vи, Nцmах, предварительно введенных значений характеристик этой ракеты и этих ее систем, а также предварительно введенного этого алгоритма вычисляют значения максимальной Дmахо и минимальной Дmino границ этой области при применении этой ракеты по не маневрирующей цели, а также значения максимальной Дmахn и минимальной Дminn границ этой области при применении этой ракеты по маневрирующей цели, сравнивают между собой значения Дmахо и Дmахn, и если Дmахо превышает Дmахn, то значение Дmах принимают равным Дmахn, а если Дmахо не превышает Дmахn, то значение Дmах принимают равным Дmахо, сравнивают между собой значения Дmino и Дminn, и если Дmino не превышает Дminn, то значение Дmin принимают равным Дminn, а если Дmino превышает Дminn, то значение Дmin принимают равным Дmino, сравнивают в этом вычислителе также значение Диц с значениями Дmах и Дmin и при условии, что Диц не больше, чем Дmах, и Диц не меньше, чем Дmin, формируют электрический сигнал Uи, который подают на другой вход исполнительного устройства, и осуществляют пуск этой ракеты только при наличии на обоих входах этого устройства сигналов Uи и Uп.
| КАЗАКОВ И | |||
| Е., МИШАКОВ А | |||
| Ф | |||
| Авиационные управляемые ракеты, ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| проф | |||
| Н | |||
| Е | |||
| Жуковского, 1985, с | |||
| Приспособление для постепенного включения и выключения фрикционных муфт в самодвижущихся экипажах и т.п. | 1919 |
|
SU356A1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ | 1993 |
|
RU2079090C1 |
| Устройство для формирования серий импульсов | 1985 |
|
SU1307548A1 |
| US 5974940 A, 02.11.1999 | |||
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2542863C1 |
| DE 3606192 A1, 27.02.1992 | |||
| СПОСОБ ВЫРАЩИВАНИЯ СЪЕДОБНЫХ ГРИБОВ LENTINUS EDODES | 2003 |
|
RU2239983C1 |

