Изобретение относится к области машиностроения, а более конкретно, к исполнительным органам вакуумных манипуляторов.
Известно устройство исполнительного органа манипулятора [1], содержащee основание, упругую приводную систему и источник энергии с подводящими каналами.
Недостатком аналога является перемещение исполнительного органа только в одном направлении, считая от нулевой точки, т.е. точки положения органа, где отсутствует деформация упругой приводной системы.
Наиболее близким по технической сущности и достигаемому результату является устройство исполнительного органа манипулятора [2], содержащее основание, упругую приводную систему, несущую захватный орган, и источник энергии с подводящими каналами.
Недостатком прототипа является также перемещение несущего захватного органа только в одном направлении, считая от нулевой точки, т.е. точки положения органа, где отсутствует деформация упругой приводной системы.
В основу изобретения положена задача обеспечить возможность перемещения несущего захватного органа манипулятора в двух направлениях - прямом и обратном, считая от нулевой точки, т.е. точки положения органа, где отсутствует деформация упругой приводной системы.
Эта задача решается тем, что упругая приводная система выполнена в виде двух манометрических пружин, причем первая пружина выполнена в виде геликоида, а вторая - в виде геликоида с навивкой на ребро и установлена внутри первой.
Введение в устройство исполнительного органа упругой приводной системы в виде двух манометрических пружин - геликоида, раскручивающегося под действием приложенного внутреннего давления, и геликоида с навивкой на ребро, скручивающегося под действием приложенного давления, обеспечивает перемещение захватного органа как в прямом, так и в обратном направлениях, считая от нулевой точки, т.е. точки положения органа, где отсутствует деформация упругой приводной системы.
Сущность изобретения поясняется чертежом, где показана схема устройства исполнительного органа манипулятора.
Исполнительный орган манипулятора содержит основание 1, упругую приводную систему 2, несущий захватный орган 3, источник энергии 4 с подводящими каналами 5, 6, 7. Упругая приводная система 2 выполнена в виде геликоида 8 и геликоида 9 с навивкой на ребро. Геликоид 9 с навивкой на ребро установлен внутри геликоида 8.
Исполнительный орган манипулятора работает следующим образом.
Для перемещения несущего захватного органа 3 по часовой стрелке (см. чертеж) из источника энергии 4 через подводящий канал 5 в геликоид 8 поступает рабочий газ или жидкость. Геликоид 8 начинает раскручиваться. Чем больше давление внутри геликоида 8, тем больше угол раскручивания.
Для перемещения несущего захватного органа 3 против часовой стрелки из источника энергии 4 через подводящий канал 6 в геликоид 9 с навивкой на ребро поступает рабочий газ или жидкость. Геликоид 9 с навивкой на ребро начинает скручиваться. Чем больше давление внутри геликоида 9, тем больше угол скручивания.
Для захвата детали (на чертеже условно не показана) из источника энергии 4, через подводящий канал 7 поступает рабочий газ или жидкость в несущий захватный орган 3, который начинает сжиматься, тем самым схватывая деталь.
Применение предлагаемого устройства исполнительного органа манипулятора позволяет обеспечить применение несущего захватного органа в двух направлениях - прямом и обратном, считая от нулевой точки, т.е. точки положения органа, где отсутствует деформация упругой приводной системы.
Источники информации
1. Авт. свид. СССР N476972, кл. B 25 J 1/02, 1975 (аналог).
2. Авт. свид. СССР N837845, кл. B 25 J 1/02, 1981 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2125254C1 |
| Манипулятор | 1986 |
|
SU1313686A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| РАБОЧИЙ ОРГАН | 2012 |
|
RU2569826C2 |
| Исполнительный орган манипулятора | 1984 |
|
SU1187980A1 |
| Манипулятор | 1985 |
|
SU1278199A1 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ НА АСТЕРОИДЕ С ПОМОЩЬЮ ИСКУССТВЕННОГО ОСВЕЩЕНИЯ | 2014 |
|
RU2586437C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2006405C1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| СПОСОБ ПРОИЗВОДСТВА КОМПОНЕНТА САМОЛЕТА ИЗ ВОЛОКОННО-МЕТАЛЛИЧЕСКОГО СЛОИСТОГО МАТЕРИАЛА | 2016 |
|
RU2752348C2 |
На основании смонтирована упругая приводная система, несущая захватный орган и выполненная в виде двух манометрических пружин. Первая пружина представляет собой геликоид, а вторая - геликоид с навивкой на ребро. Вторая пружина установлена внутри первой. Для подачи в геликоиды рабочего газа или жидкости предусмотрен источник энергии с подводящими каналами. В результате обеспечивается возможность перемещения захватного органа в двух направлениях, считая от положения органа, в котором отсутствует деформация упругой приводной системы. 1 ил.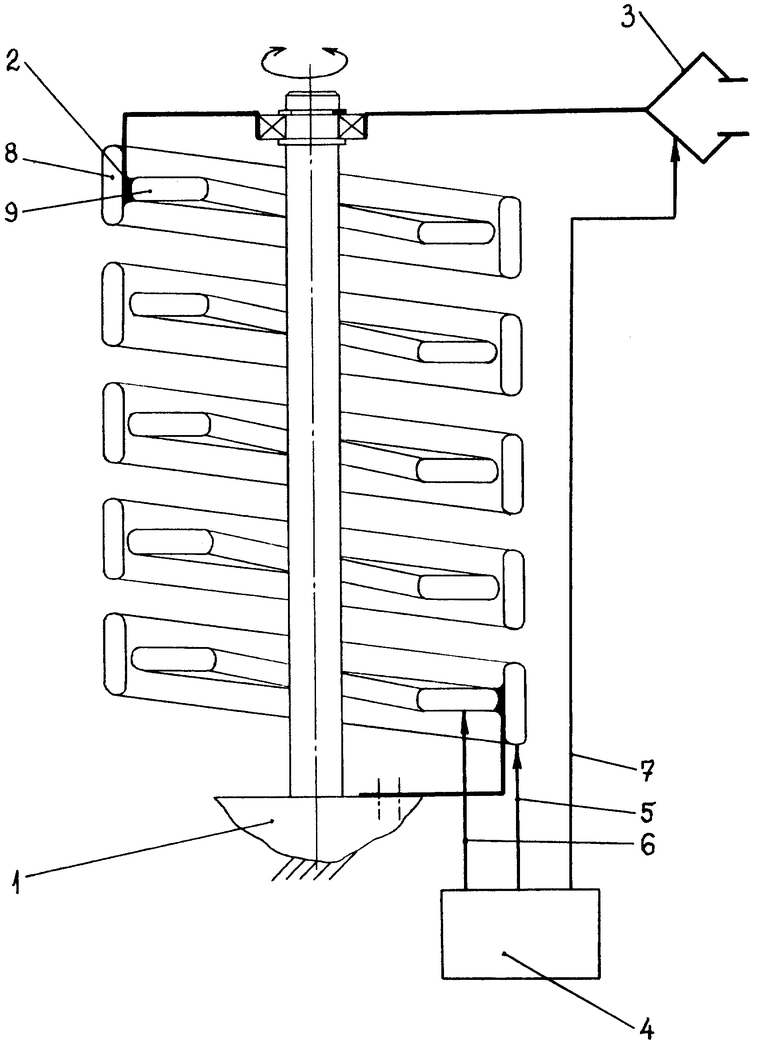
Исполнительный орган манипулятора, содержащий основание, упругую приводную систему, несущую захватный орган, и источник энергии с подводящими каналами, отличающийся тем, что упругая приводная система выполнена в виде двух манометрических пружин, причем первая пружина выполнена в виде геликоида, а вторая - в виде геликоида с навивкой на ребро и установлена внутри первой.
| Механическая рука манипулятора | 1974 |
|
SU837845A1 |
| Модуль манипулятора | 1983 |
|
SU1104016A1 |
| Исполнительный орган манипулятора | 1974 |
|
SU476972A1 |
| Рука манипулятора | 1978 |
|
SU697315A1 |
| US 3712481 A, 23.01.73 | |||
| DE 3937706 A1, 16.05.91 | |||
| DE 4214378 C1, 26.08.93. | |||
