Область техники, к которой относится изобретение
Изобретение относится к рабочему органу, в частности к захвату согласно ограничительной части пункта 1 формулы изобретения, а также к способу выполнения манипуляций с деталями согласно пункту 17 формулы изобретения.
Указанный рабочий орган представляет собой инструмент, управляемый манипулятором и в соответствии с назначением установленный на манипуляторе, в частности прикрепленный к нему при помощи фланцев. Манипулятор может представлять собой двигательный аппарат любого вида. Обычно манипулятором является робот.
Уровень техники
Указанный инструмент часто изготавливается в виде захвата и используется для выполнения манипуляций, которые производятся автоматически при помощи манипулятора. При этом в случае выполнения манипуляций с легкодеформируемыми деталями, например с заготовками из волокнистых материалов или т.п., к захвату предъявляются особые требования. Выполнение манипуляций с указанными заготовками из волокнистых материалов играет важную роль при изготовлении деталей из волокнистых композиционных материалов. Такие детали из волокнистых композиционных материалов находят все более широкое применение в авиационной промышленности для изготовления конструктивных узлов, в частности корпусов фюзеляжей с низким весом и хорошими механическими свойствами (DE 102007003275 A1).
В данном случае рассматривается применение указанных захватов для выполнения манипуляций, в первую очередь связанных с укладкой в инструментальную форму или с накладкой на инструментальную форму вышеуказанной заготовки из волокнистого материала. При этом захват регулярно выполняет не только функцию транспортирования, но также и функцию драпирования. Перед укладкой или накладкой детали выполняется операция драпирования, на которой обеспечивается соответствие поверхности детали поверхности инструмента.
Известный захват (DE 10152232 A1), из которого исходит настоящее изобретение, оснащен несущим элементом для инструментального устройства, в данном случае - для захватного устройства, которое обеспечивает удерживающий захват детали. Захватное устройство содержит ряд присосок, каждая из которых оснащена отдельным исполнительным приводом, поэтому они могут быть ориентированы независимо друг от друга.
Тот факт, что каждую присоску можно свободно перемещать независимо от остальных, теоретически обеспечивает высокую гибкость при драпировании детали. Однако при этом возникают технические проблемы, связанные с приводом и управлением, в частности при установке инструмента на изогнутые или даже сферические поверхности деталей.
Раскрытие изобретения
Задача настоящего изобретения заключается в том, чтобы модифицировать и усовершенствовать известный инструмент для манипулятора таким образом, чтобы при помощи простых конструктивных и управляющих устройств его можно было ориентировать в широкой области на любых поверхностях деталей.
Вышеуказанная задача решена при помощи инструмента согласно ограничительной части пункта 1 формулы изобретения с признаками отличительной части пункта 1 формулы изобретения.
Важной является принципиальная идея установить инструментальное устройство на несущем элементе, который при помощи приводного устройства может быть целенаправленно деформирован. Установлено, что при помощи такой целенаправленной деформации несущего элемента можно также обеспечить целенаправленную ориентацию инструментального устройства в пространстве. Деформация несущего элемента переносится на инструментальное устройство.
В особенно предпочтительном варианте осуществления инструмента в виде захвата согласно пункту 2 формулы изобретения вышеуказанную возможность ориентирования можно выгодно использовать при съеме, а также при укладке или накладке деталей. Предлагаемое решение можно также использовать для драпирования захваченных деталей. При этом деформация несущего элемента через захватное устройство переносится непосредственно на деталь.
При соответствующем подборе механических свойств несущего элемента даже сложные деформированные конструкции можно получить при помощи простого приводного устройства. Если несущий элемент представляет собой несущую пластину, то можно простым способом обеспечить, чтобы эта несущая пластина деформировалась исключительно вдоль плавной кривой деформации, даже если на несущий элемент действуют только точечные силы управления. Термин "несущая пластина", используемый в данном описании, следует понимать в широком смысле. Он включает все, по существу, плоские формы, в том числе также узкие, полосовидные несущие элементы или т.п.
В особенно предпочтительном варианте осуществления согласно пункту 6 формулы изобретения приводное устройство содержит по меньшей мере один, предпочтительно, - несколько исполнительных приводов, которые предпочтительно распределены на поверхности несущего элемента и, соответственно, соединяются посредством несущего элемента. Как указано выше, благодаря соответствующему распределению, исполнительные приводы могут создавать из несущего элемента сильно деформированные конструкции.
Однако за счет соединения исполнительных приводов не только облегчается возможность регулирования деформации несущего элемента. В гораздо большей степени это соединение оказывает положительное влияние на общую прочность захвата.
Инструментальное устройство предпочтительно содержит по меньшей мере один инструментальный элемент (пункт 11 формулы изобретения), при этом указанный по меньшей мере один инструментальный элемент выполнен, например, в виде обрабатывающего элемента, прижимного элемента или - в особенно предпочтительных вариантах осуществления согласно пунктам 12-14 формулы изобретения - в виде захватного элемента. Далее, предпочтительно также, чтобы несколько захватных элементов были распределены на поверхности несущего элемента, что гарантирует оптимальную возможность их ориентирования. При этом интересным является тот факт, что даже в случае только точечно действующих исполнительных приводов и только точечно действующих захватных элементов при их соответствующем распределении можно осуществлять драпирование захваченной детали на практически любых поверхностях произвольной формы.
В случае нескольких инструментальных элементов, в частности, нескольких захватных элементов, предлагаемое решение обеспечивает механическую связь захватных элементов друг с другом. Это приводит к тому, что деформация несущего элемента в области одного захватного элемента оказывает постоянное влияние на деформацию несущего элемента в области другого захватного элемента. В случае несущей пластины эта связь при соответствующем конструктивном исполнении может обеспечивать, по существу, тангенциальное расположение захватных элементов относительно общей кривой деформации.
В особенно предпочтительном варианте осуществления согласно пункту 14 формулы изобретения в проекции, перпендикулярной поверхности несущей пластины, по меньшей мере часть точек приложения силы захватных элементов на детали и точек приложения силы исполнительных приводов на несущей пластине находятся на расстоянии друг от друга. При этом особенно очевидно, что ориентация инструментальных элементов, в частности захватных элементов, осуществляется не непосредственно установочными движениями приводного устройства, а в результате деформации несущего элемента.
Предлагаемый инструмент для манипулятора согласно пункту 15 формулы изобретения может иметь простую модульную конструкцию, при этом два или более несущих элементов объединяются в один инструмент. При этом предпочтительно, чтобы для каждого несущего элемента было предусмотрено, как одно инструментальное устройство, так и одно приводное устройство, таким образом, несущие элементы могут работать отдельно друг от друга. Для того, чтобы поведение при деформации результирующего инструмента приблизить к поведению при деформации инструмента с одним единственным несущим элементом, в особенно предпочтительном варианте осуществления предусмотрено, чтобы отдельные несущие элементы соединялись друг с другом при помощи по меньшей мере одного, в частности, упругодеформируемого промежуточного элемента (пункт 16 формулы изобретения).
Согласно пункту 17 формулы изобретения, который также имеет самостоятельное значение, предлагается способ выполнения манипуляций с деформируемыми деталями, в частности, с легкодеформируемыми, плоскими деталями, при помощи захвата согласно изобретению.
В соответствии с предлагаемым способом на первой операции соответствующую деталь захватывают из накопителя, на второй операции осуществляют драпирование захваченной детали путем соответствующего управления приводным устройством, и на третьей операции драпированную деталь складывают или укладывают в заданную позицию.
Предлагаемый способ позволяет выгодно использовать возможность ориентирования вышеуказанных инструментальных систем не только при съеме и складывании или укладке, но и при драпировании захваченной детали. При этом можно сослаться на все варианты осуществления, пригодные для описания или усовершенствования предлагаемого способа.
Краткое описание чертежей
Ниже только в качестве примера осуществления приводится более подробное описание изобретения со ссылками на прилагаемые чертежи, на которых показано:
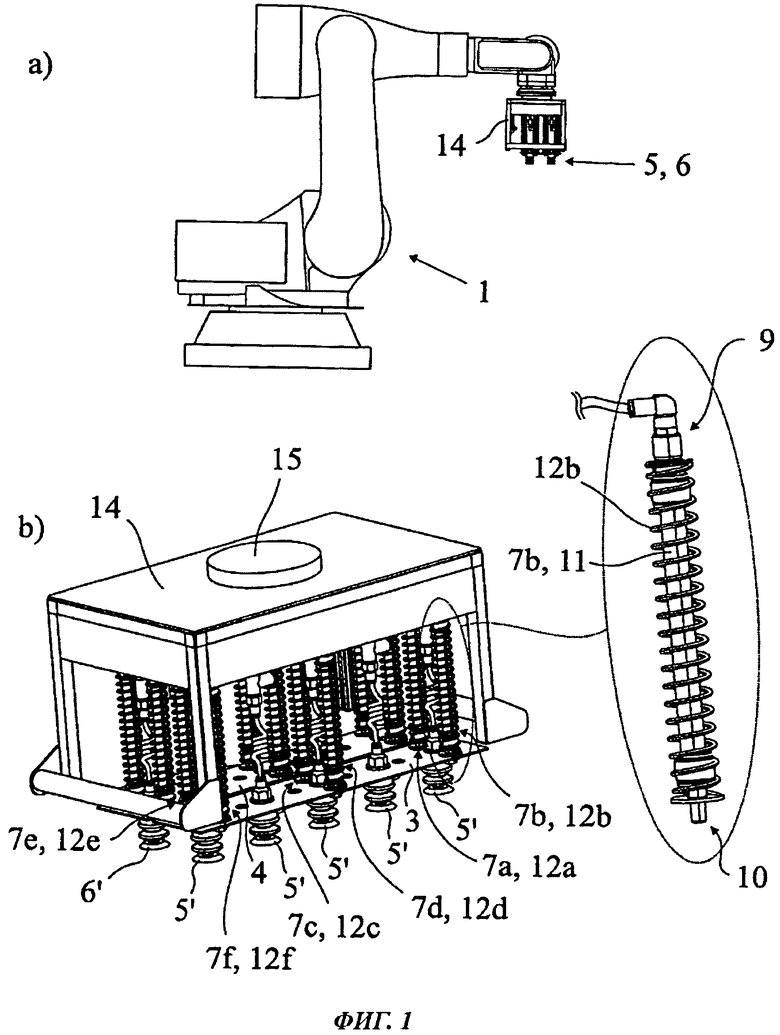
фиг. 1 - a) предлагаемый захват, присоединенный к манипулятору при помощи фланца, и b) захват с фиг. a), аксонометрический вид под углом сверху,
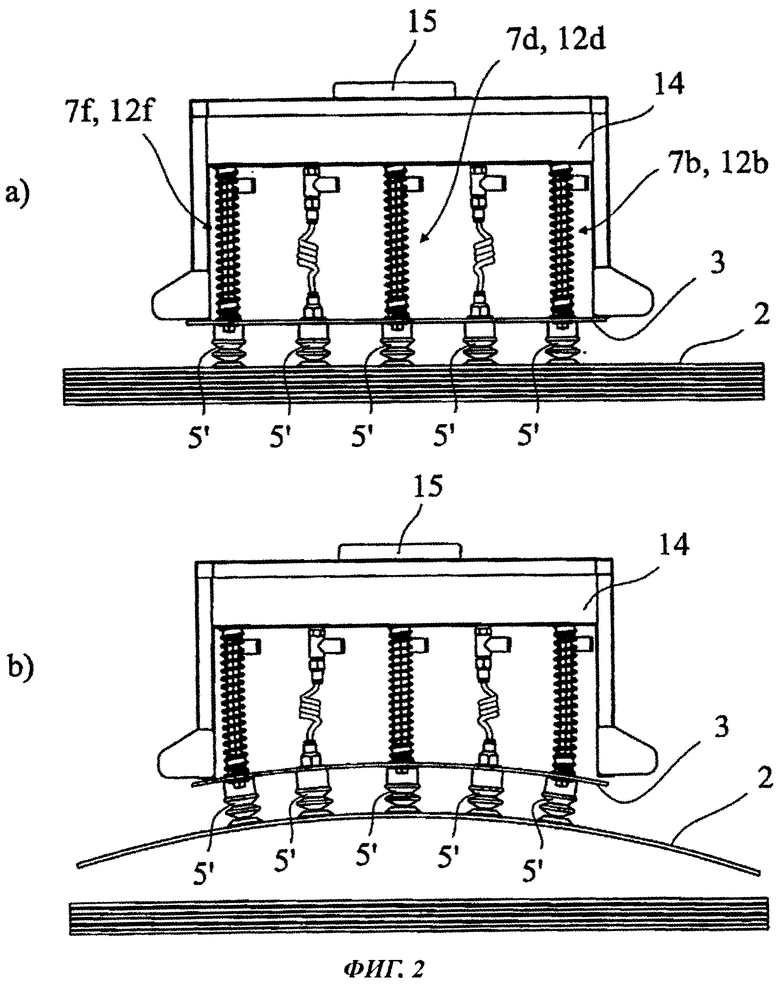
фиг. 2 - захват с фиг. 1, виды сбоку a) в основном состоянии и b) в ориентированном состоянии,
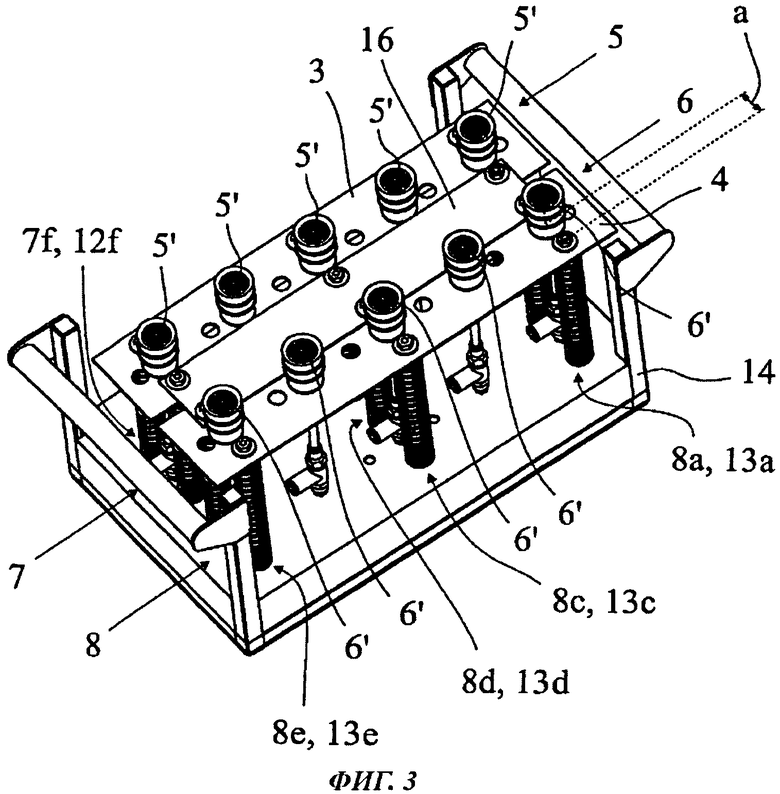
фиг. 3 - захват с фиг. 1, аксонометрический вид под углом снизу и
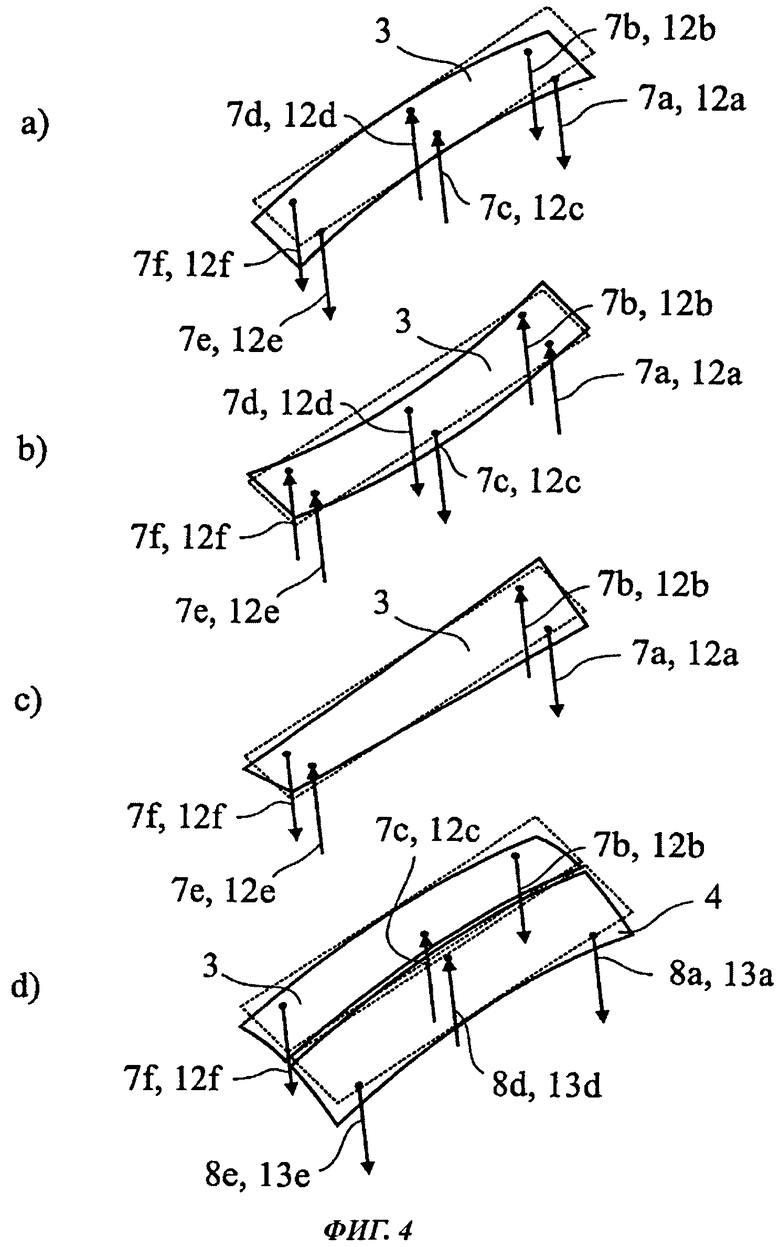
фиг. 4 - схематическое изображение в демонтированном состоянии, a)-c) несущий элемент захвата с фиг. 1 с выпуклой деформацией, с вогнутой деформацией и с деформацией скручивания плоскости и d) оба несущих элемента захвата с фиг. 1 со сферической деформацией.
Осуществление изобретения
Предлагаемый рабочий орган, который представляет собой инструмент, управляемый манипулятором, может использоваться для решения любых задач, примерами которых являются захват, шлифование, фрезерование, резка, приклеивание, тепловая обработка или измерение. Во всех случаях инструмент содержит по меньшей мере один несущий элемент 3, 4 для инструментального устройства 5, 6, выполненный, в частности, в виде несущей пластины, при этом инструментальное устройство 5, 6 в общем случае служит для взаимодействия с деталью 2.
Рабочий орган, показанный на чертеже, выполнен в виде захвата для управляемого манипулятором захватывания деталей 2. Все описанные ниже варианты осуществления, связанные с захватом, в равной степени пригодны для всех других видов применимых инструментов.
Указанные детали предпочтительно представляют собой заготовки из волокнистых материалов. Однако это также не следует понимать как ограничение. Предлагаемый захват может применяться для выполнения всех возможных, в частности, автоматизированных операций манипулирования.
Показанный на чертеже захват содержит по меньшей мере один несущий элемент 3, 4, в данном случае и предпочтительно два несущих элемента 3, 4. В принципе, как поясняется ниже, любое количество несущих элементов 3, 4 можно объединить друг с другом в виде модулей.
Каждому несущему элементу 3, 4 соответствует захватное устройство 5, 6 (фиг. 3), при этом, как поясняется ниже, благодаря соответствующему захватному устройству 5, 6, можно обеспечить удерживающий захват захватываемой детали 2.
Совместное рассмотрение фиг. 2a и 2b показывает, что несущие элементы 3, 4 выполнены из деформируемого материала. В принципе, несущий элемент 3, 4 может быть лишь частично изготовлен из деформируемого материала. В данном случае и предпочтительно несущие элементы 3, 4 являются изготовленными из упругодеформируемого материала, при этом на несущие элементы 3, 4 действует также возвратная пружина.
Для несущих элементов 3, 4 предусмотрено по одному приводному устройству 7, 8 (фиг. 3), под действием которых соответствующий несущий элемент 3, 4 может деформироваться и ориентировать в пространстве соответствующее инструментальное устройство 5, 6, в данном случае - соответствующее захватное устройство 5, 6. Ориентированное состояние показано на фиг. 2b.
Как указано выше, в данном случае и предпочтительно, чтобы захватываемая деталь 2 представляла собой деформируемую деталь 2, более предпочтительно - легкодеформируемую и плоскую деталь 2. В рамках описываемого здесь изготовления в первую очередь деталей из волокнистых композиционных материалов деталь 2 представляет собой заготовку из волокнистого композиционного материала. Во всех случаях предпочтительно иметь возможность драпирования детали 2 в захваченном состоянии при помощи приводного устройства 7, 8.
В принципе, несущие элементы 3, 4 могут быть изготовлены из тонкого листа, в частности, из пружинной стали. Однако в данном случае и предпочтительно предусмотрено изготовление несущих элементов 3, 4 из пластмассы или каучукового материала. В показанном примере осуществления несущие элементы 3, 4 имеют достаточную устойчивость формы, поэтому они только накладываются на приводное устройство 7, 8. Однако несущие элементы 3, 4 могут также содержать легкодеформируемый мат, в частности легкодеформируемый резиновый мат, который натягивается на раму и может деформироваться при помощи приводного устройства 7, 8.
Путем соответствующего управления приводным устройством 7, 8 можно получать практически любые формы несущего элемента 3, 4, выполненного в виде несущей пластины. Это наглядно видно на схематических изображениях, показанных на фиг. 4.
С одним и тем же несущим элементом 3, 4, выполненным в виде несущей пластины, можно получать выпуклые формы (фиг. 4a), вогнутые формы (фиг. 4b) и свободные формы скрученных плоскостей (фиг. 4c). При соответствующем конструктивном исполнении согласно фиг. 4d можно также получить, по существу сферическую деформацию несущего элемента 3, 4, выполненного в виде несущей пластины, в данном случае - обоих несущих элементов 3, 4 (фиг. 4d).
Вышеуказанная деформация несущих элементов 3, 4 в данном случае и предпочтительно осуществляется под действием точечных силовых воздействий приводных устройств 7, 8 на несущие элементы 3, 4. Для приложения этих сил приводные устройства 7, 8 оснащены предпочтительно несколькими, в частности, бесступенчато регулируемыми исполнительными приводами 7a-f, 8a-f, которые воздействуют на сторону соответствующего несущего элемента 3, 4, противоположную детали 2, вызывая деформацию указанного несущего элемента 3, 4. В принципе, может быть предусмотрен только один исполнительный привод 7, 8.
На фиг. 4a-c показано, какие силовые воздействия следует приложить к несущему элементу 3, чтобы получить требуемую деформацию. Эти силовые воздействия показаны на фиг. 4 стрелками со ссылочными номерами соответствующих исполнительных приводов 7a-f и пружинных элементов 12a-f, которые описаны ниже. Важно, чтобы силы, препятствующие деформации и действующие на несущий элемент 3, имели пространственное смещение. Это связано с тем, что несущие элементы 3, 4 взаимодействуют, по существу, исключительно с соответствующим приводным устройством 7, 8 и не имеют больше никаких опор, как поясняется ниже.
На фиг. 4d показаны оба несущих элемента 3, 4, которые, как поясняется ниже, соединяются друг с другом и испытывают сферическую деформацию. При этом особенно хорошо проявляется гибкость ориентации инструмента согласно предлагаемому решению.
Для обеспечения простого и энергоэффективного управления приводными устройствами 7, 8 предпочтительно предусмотрено, чтобы при помощи приводных устройств 7, 8 предварительно установленное положение, например, положение, показанное на фиг. 4a-c, сохранялось без подачи энергии. Это можно осуществить, если, например, выполнить исполнительные приводы 7a-f, 8a-f самоблокирующимися.
В показанном и соответственно предпочтительном примере осуществления приводные устройства 7, 8, напротив, выполнены в виде пневматических приводных устройств, которые установлены таким образом, чтобы иметь возможность управлять вышеуказанным самоблокирующим действием. Это можно осуществить, например, если в пневмопроводе соответствующего исполнительного привода 7a-f, 8a-f установить обратный клапан, который будет препятствовать нежелательному выпуску воздуха из соответствующего исполнительного привода 7a-f, 8a-f.
Для управления исполнительными приводами 7a-f, 8a-f предпочтительно предусмотрен отдельный не показанный здесь пропорциональный регулятор давления, при помощи которого можно снижать давление питания до любой величины. Для управления исполнительными приводами 7a-f, 8a-f выходное давление пропорционального регулятора давления через систему управления клапанами подается на соответствующий исполнительный привод 7a-f, 8a-f. Поскольку оба исполнительных привода 7a-f, 8a-f должны приводиться в действие одним и тем же давлением, на эти исполнительные приводы 7a-f, 8a-f соответственно одновременно подается выходное давление пропорционального регулятора давления. В принципе, для каждого исполнительного привода 7a-f, 8a-f может быть предусмотрен такой пропорциональный регулятор давления, что, однако, неблагоприятно влияет на общий вес рабочего органа. После настройки соответствующего исполнительного привода 7a-f, 8a-f этот исполнительный привод 7a-f, 8a-f подключается к обратному клапану, таким образом, установленное положение сохраняется без подачи энергии, как указано выше.
Как видно на фиг. 4, приводные устройства 7, 8 для деформации несущих элементов 3, 4 должны создавать управляющие усилия, по меньшей мере составляющие которых действуют перпендикулярно поверхности несущего элемента 3, 4. Для этой цели предпочтительно предусмотреть, чтобы по меньшей мере один исполнительный привод 7a-f, 8a-f был выполнен в виде линейного привода. Детальное изображение такого линейного привода 7a-f, 8a-f показано на фиг. 1b.
В принципе, указанный линейный привод 7a-f, 8a-f может представлять собой электрический винтовой привод, пневматический поршневой привод или т.п.
Однако в данном случае и предпочтительно, чтобы по меньшей мере один исполнительный привод 7a-f, 8a-f содержал между двумя соединительными элементами 9, 10 трубчатый отрезок 11, к которому может избирательно подводиться определенное давление воздуха. При соответствующем подводе давления происходит изменение длины трубчатого отрезка 11, и, таким образом, создается приводное движение. Такие линейные приводы известны как „пневматические мышцы". Дополнительную информацию об этом можно получить в брошюре „Fluidic Muscle DMSP/MAS" компании Festo AG & Co. KG, 2010/12.
Исполнительные приводы 7a-f, 8a-f с их трубчатыми отрезками в представленном примере осуществления ориентированы, по существу, перпендикулярно поверхности несущей пластины 3, 4. Однако, в принципе, возможна также любая другая ориентация, в частности, когда поворотный элемент или т.п. установлен между исполнительным приводом 7a-f, 8a-f и несущей пластиной 3, 4.
Что касается вышеуказанных подобных мышцам исполнительных приводов 7a-f, 8a-f, интересным является тот факт, что исполнительные приводы 7a-f, 8a-f позволяют производить непосредственную бесступенчатую настройку, чтобы обеспечить соответствующую плавную деформацию несущего элемента 3, 4. Бесступенчатая настройка выгодно осуществляется без эффекта заедания, при этом ввиду отсутствия подшипников трения можно отказаться от смазки.
Вместо вышеописанных исполнительных приводов 7a-f, 8a-f, действующих снаружи на несущий элемент 3, 4, в принципе, можно также использовать исполнительные приводы, встроенные в несущий элемент 3, 4. Так, например, приводное устройство 7, 8 может содержать множество пьезоэлементов, которые взаимодействуют с несущим элементом 3, 4 и, в частности, встроены в несущий элемент 3, 4.
Исполнительные приводы 7a-f, 8a-f могут быть, в принципе, выполнены в виде двунаправленных исполнительных приводов. Однако для обеспечения конструктивно простого и, следовательно, экономичного варианта осуществления предпочтительно, чтобы исполнительные приводы 7a-f, 8a-f были выполнены в виде однонаправленных исполнительных приводов. Тем не менее, чтобы все-таки создавать силовые воздействия в противоположных направлениях, необходимые для получения вышеуказанной деформации несущего элемента 3, 4, в данном случае и предпочтительно предусмотрено пружинное устройство 12, 13, которое действует на несущий элемент 3, 4 параллельно и в определенных случаях в противоположном направлении относительно приводного устройства 7, 8. На фиг. 4, как указано выше, стрелками обозначены силовые воздействия, которые получаются в результате комбинации сил, создаваемых исполнительными приводами и пружинами.
Пружинное устройство 12, 13 содержит по меньшей мере один пружинный элемент 12a-f, 13a-f, линия действия силы которого, по существу, ориентирована по линии действия силы соответствующего исполнительного привода 7a-f, 8a-f. В частности, исполнительные приводы 7a-f, 8a-f установлены в продольном направлении, а пружинный элемент 12a-f, 13a-f, предусмотренный для соответствующего исполнительного привода 7a-f, 8a-f, выполнен в виде винтовой пружины, в которую устанавливается соответствующий исполнительный привод 7a-f, 8a-f.
Существует множество возможностей осуществления инструментального устройства 5, 6. Инструментальное устройство 5, 6 предпочтительно содержит по меньшей мере один инструментальный элемент 5′, 6′, который расположен на стороне несущего элемента 3, 4, обращенной к детали 2. В данном случае и предпочтительно предусмотрено несколько инструментальных элементов 5′, 6′, которые распределены на поверхности несущего элемента 3, 4. При этом, как показано на чертеже, инструментальные элементы 5′, 6′ могут представлять собой захватные элементы, или, например, инструментальные элементы, предназначенные для шлифования, фрезерования, отрезания, приклеивания, термообработки, измерения или т.п.
В показанном и при этом предпочтительном примере осуществления захватное устройство 5, 6 содержит всего пять захватных элементов 5′, 6′, которые в данном случае и предпочтительно расположены на стороне несущего элемента 3, 4, обращенной к захватываемой детали 2. Эти несколько захватных элементов 5′, 6′ распределены на поверхности несущего элемента 3, 4 таким образом, чтобы обеспечить предлагаемую ориентацию захватного устройства 5, 6 путем деформации несущего элемента 3, 4.
Для реализации захватных элементов 5′, 6′ также возможно множество вариантов. Так, например, захватные элементы 5′, 6′ могут быть выполнены в виде клещевых захватов, игольчатых захватов, примораживающих захватов или т.п. Однако в данном случае и предпочтительно захватное устройство 5, 6 выполнено в виде пневматического захватного устройства, при этом захватные элементы 5′, 6′ выполнены соответственно в виде пневматических захватных элементов, в данном случае и предпочтительно - в виде присосок.
С конструктивной точки зрения предлагаемый захват является особенно интересным, поскольку захватные элементы 5′, 6′ могут иметь практически любое расположение на соответствующем несущем элементе 3, 4. Как показано на фиг. 3, в проекции, перпендикулярной поверхности несущей пластины 3, 4, по меньшей мере часть точек приложения силы захватных элементов 5′, 6′ к захватываемой детали 2 и точек приложения силы исполнительных приводов 7a-f, 8a-f на несущей пластине 3, 4 находится на расстоянии друг от друга. В качестве примера это расстояние обозначено на фиг. 3 ссылочным символом "a".
Существенной деталью для конструктивного варианта осуществления, представленного на фиг. 1-3, является пневматическое присоединение захватных элементов 5′, 6′. В данном случае и предпочтительно предусмотрено, чтобы пневмопровод по меньшей мере на отдельных участках имел спиральную форму, позволяющую обеспечивать необходимую компенсацию линейного удлинения, связанного с деформацией несущего элемента 3, 4.
С точки зрения модульной компоновки предпочтительным является общее конструктивное исполнение рабочего органа, показанное на чертеже. Захватное устройство снабжено стандартным блочным каркасом 14, в котором установлены несущие элементы 3, 4 с соответствующими инструментальными устройствами 5, 6, в данном случае - с захватными устройствами 5, 6, и с соответствующими приводными устройствами 7, 8. При этом указанный стандартный блочный каркас 14 в данном случае и предпочтительно содержит механический и/или электрический разъем 15 для подключения к вышеописанному манипулятору 1.
На фиг. 3 показано, в частности, что предлагаемый инструмент со стандартным блочным каркасом 14 может иметь модульное расширение. Это связано, по существу, с тем фактом, что, как поясняется выше, для каждого несущего элемента 3, 4 предусмотрено отдельное инструментальное устройство 5, 6, в данном случае - захватное устройство 5, 6, и отдельное приводное устройство 7, 8.
Предпочтительно предусмотреть по меньшей мере два несущих элемента 3, 4, выполненных таким образом, чтобы они соединялись друг с другом посредством по меньшей мере одного упругодеформируемого промежуточного элемента 16, при этом промежуточный элемент 16 в данном случае и предпочтительно выполнен в виде промежуточной пластины. Вполне возможно оснастить инструмент не только двумя модулями, но и тремя модулями, при этом каждый модуль содержит несущий элемент 3, 4, инструментальное устройство 5, 6, в данном случае - захватное устройство 5, 6, предусмотренное для несущего элемента 3, 4, и приводное устройство 7, 8, предусмотренное для несущего элемента 3, 4. Модули, как указано выше, соединяются друг с другом по меньшей мере одним, в частности, упругодеформируемым, промежуточным элементом 16.
Как показано на фиг. 2 и 3, только приводные устройства 7, 8 несущих элементов 3, 4 расположены в стандартном блочном каркасе 14, в остальном несущие элементы могут свободно менять положение независимо от стандартного блочного каркаса 14. Это обеспечивает максимальную степень свободы при деформации несущих элементов 3, 4. Может также быть предпочтительным, чтобы несущие элементы 3, 4 сами опирались на стандартный блочный каркас 14. Таким образом, при определенных условиях можно обеспечить особенно высокую механическую устойчивость захватного устройства 5, 6.
Согласно другому аспекту, который также имеет самостоятельное значение, предлагается способ выполнения манипуляций с деформируемыми деталями 2, в данном случае и предпочтительно - с легкодеформируемыми, плоскими деталями 2, который осуществляется при помощи вышеуказанного захвата. Предлагаемый способ предпочтительно служит для выполнения манипуляций с заготовками из волокнистых материалов в рамках изготовления деталей из этих заготовок.
На первой операции соответствующая деталь 2 захватывается из накопителя или т.п. Эта ситуация показана на фиг. 2a. При этом деталь 2 обычно образует плоскость, поэтому деформация несущего элемента 3, 4 не требуется. На второй операции при помощи вышеописанного управления приводного устройства 7, 8 осуществляется драпирование захваченной детали 2, как показано на фиг. 2b. Драпирование обеспечивается при помощи приводного устройства 7, 8, благодаря вышеописанной деформации несущих элементов 3, 4. И, наконец, на третьей операции драпированная деталь 2 укладывается или закладывается в заданную позицию. Эта третья операция не показана на чертеже, поскольку она в первую очередь определяется настройкой манипулятора 1, в данном случае - робота 1.
Предлагаемый способ особенно наглядно показывает, что простые конструктивные средства обеспечивают чрезвычайно высокую гибкость применения предлагаемого захвата. Управление приводным устройством 7, 8 также можно реализовать при помощи простых средств, при этом данные об ориентации захватного устройства 5, 6 вводятся в процессе программирования, сохраняются в запоминающем устройстве и соответственно вызываются во время работы. При этом можно сослаться на все варианты осуществления предлагаемого захвата, которые связаны с пояснениями или усовершенствованиями предлагаемого способа.
Благодаря простой конструкции, предлагаемый рабочий орган можно реализовать с особенно низким весом, что является очень полезным в рамках его применения с манипулятором 1. Это в особой степени относится к случаю применения вышеуказанных подобных мышцам исполнительных приводов 7a-f, 8а-f.
Предлагается также манипулятор 1, который оснащен предлагаемым рабочим органом, в частности предлагаемым захватом. В этой связи можно сослаться на все вышеприведенные пояснения.
Изобретение относится к рабочему органу для манипулятора. Рабочий орган включает инструментальное устройство для взаимодействия с деталью. Инструментальное устройство имеет, по меньшей мере, один несущий элемент. Несущий элемент выполнен в виде несущей пластины. Несущий элемент изготовлен из деформируемого материала. Для несущего элемента предусмотрено приводное устройство. Под действием приводного устройства несущий элемент деформируется с обеспечением ориентации инструментального устройства в пространстве. Обеспечивается простота конструкции и управления. Достигается возможность ориентации инструмента манипулятора в широкой области на любых поверхностях деталей. 2 н. и 14 з.п. ф-лы, 9 ил.
1. Рабочий орган, в частности захват для манипулятора (1), предназначенный для взаимодействия с деталью (2), в котором предусмотрен по меньшей мере один несущий элемент (3, 4) для инструментального устройства (5, 6), выполненный, в частности, в виде несущей пластины, при этом инструментальное устройство (5, 6) служит для взаимодействия с деталью (2), несущий элемент (3, 4) по меньшей мере частично выполнен из деформируемого материала, в частности из упругодеформируемого материала, при этом для несущего элемента (3, 4) предусмотрено приводное устройство (7, 8), под действием которого несущий элемент (3, 4) может быть деформирован с обеспечением, таким образом, ориентации инструментального устройства (5, 6) в пространстве, отличающийся тем, что по меньшей мере один исполнительный привод (7a-f, 8a-f) выполнен виде линейного привода, при этом указанный по меньшей мере один исполнительный привод (7a-f, 8a-f) содержит трубчатый отрезок (11), в который может быть подано давление воздуха, вызывающее изменение длины трубчатого отрезка (11), и, таким образом, создающее приводное движение.
2. Рабочий орган по п. 1, отличающийся тем, что инструментальное устройство (5, 6) выполнено в виде захватного устройства (5, 6), которое обеспечивает удерживающий захват детали (2), при этом захватное устройство (5, 6) может быть ориентировано в пространстве, посредством деформации несущего элемента (3, 4).
3. Рабочий орган по п. 2, отличающийся тем, что указанная деталь (2) представляет собой деформируемую деталь, предпочтительно, легкодеформируемую плоскую деталь, более предпочтительно заготовку из волокнистого композиционного материала, причем обеспечена возможность драпировки детали (2) посредством приводного устройства (7, 8) в захваченном состоянии.
4. Рабочий орган по одному из предшествующих пунктов, отличающийся тем, что несущий элемент (3, 4) выполнен из пластмассы или каучукового материала, при этом несущий элемент (3, 4) предпочтительно содержит легкодеформируемый мат, натянутый на раму.
5. Рабочий орган по п. 1, отличающийся тем, что несущий элемент (3, 4) выполнен в виде несущей пластины и может быть деформирован по меньшей мере на отдельных участках посредством приводного устройства (7, 8), принимая, по существу, выпуклую и/или вогнутую форму, при этом предпочтительно, несущая пластина (3, 4) при деформации под действием приводного устройства (7, 8) по меньшей мере на отдельных участках принимает, по существу, сферическую форму, а также предпочтительно, несущая пластина (3, 4) при деформации под действием приводного устройства (7, 8) по меньшей мере на отдельных участках принимает, по существу, произвольную форму.
6. Рабочий орган по п. 1, отличающийся тем, что приводное устройство (7, 8) содержит по меньшей мере один, в частности, бесступенчато регулируемый, исполнительный привод (7a-f, 8a-f), который действует, в частности, на сторону несущего элемента (3, 4), противоположную детали (2), для деформации несущего элемента (3, 4), при этом предпочтительно предусмотрено несколько исполнительных приводов (7a-f, 8a-f), распределенных на поверхности несущего элемента (3, 4).
7. Рабочий орган по п. 1, отличающийся тем, что посредством приводного устройства (7, 8) обеспечено сохранение предварительно установленного положения без подачи энергии, при этом, предпочтительно, приводное устройство (7, 8) выполнено в виде пневматического приводного устройства, при этом приводное устройство (7, 8) имеет такое пневматическое подключение, при котором обеспечено сохранение предварительно установленного положения без подачи энергии.
8. Рабочий орган по п. 1, отличающийся тем, что указанный по меньшей мере один исполнительный привод (7a-f, 8a-f) выполнен в виде однонаправленного исполнительного привода.
9. Рабочий орган по п. 1, отличающийся тем, что предусмотрено по меньшей мере одно пружинное устройство (12, 13), которое действует на несущий элемент (3, 4) параллельно приводному устройству (7, 8), при этом пружинное устройство (12, 13) предпочтительно содержит по меньшей мере один пружинный элемент (12a-f, 13a-f), линия действия силы которого ориентирована, по существу, по линии действия силы соответствующего исполнительного привода (7a-f, 8a-f), при этом, предпочтительно, указанный по меньшей мере один исполнительный привод (7a-f, 8a-f) имеет удлиненную форму, и каждый предусмотренный для исполнительного привода (7a-f, 8a-f) пружинный элемент (12a-f, 13a-f) выполнен в виде винтовой пружины, в которой расположен исполнительный привод (7a-f, 8a-f).
10. Рабочий орган по п. 1, отличающийся тем, что инструментальное устройство (5, 6) содержит по меньшей мере один инструментальный элемент (5′, 6′), который расположен, в частности, на стороне несущего элемента (3, 4), обращенной к детали (2), при этом предпочтительно предусмотрено несколько инструментальных элементов (5′, 6′), распределенных на поверхности несущего элемента (3, 4).
11. Рабочий орган по п. 2, отличающийся тем, что захватное устройство (5, 6) содержит по меньшей мере один захватный элемент (5′, 6′), расположенный, в частности, на стороне несущего элемента (3, 4), обращенной к захватываемой детали (2), при этом предпочтительно предусмотрено несколько захватных элементов (5′, 6′), которые распределены на поверхности несущего элемента (3, 4).
12. Рабочий орган по п. 1, отличающийся тем, что захватное устройство (5, 6) выполнено в виде пневматического захватного устройства, при этом по меньшей мере один захватный элемент (5′, 6′) предпочтительно выполнен в виде пневматического захватного элемента, в частности в виде присоски.
13. Рабочий орган по п. 1, отличающийся тем, что в проекции, перпендикулярной поверхности несущей пластины (3, 4), по меньшей мере часть точек приложения силы захватных элементов (5, 6) к захватываемой детали (2) и точек приложения силы исполнительных приводов (7, 8) на несущей пластине (3, 4) находятся на расстоянии друг от друга.
14. Рабочий орган по п. 1, отличающийся тем, что предусмотрен стандартный блочный каркас (14), в котором установлен по меньшей мере один несущий элемент (3, 4) с соответствующим инструментальным устройством (5, 6) и с соответствующим приводным устройством (7, 8), при этом указанный стандартный блочный каркас (14) предпочтительно содержит механический и/или электрический разъем (15) для подключения к манипулятору (1).
15. Рабочий орган по одному из пп. 1-3, 5-14, отличающийся тем, что предусмотрено по меньшей мере два несущих элемента (3, 4) с соответствующим инструментальным устройством (5, 6) и с соответствующим приводным устройством (6, 7), при этом два соседних несущих элемента (3, 4) предпочтительно соединены друг с другом посредством по меньшей мере одного, в частности, упругодеформируемого промежуточного элемента (16), при этом промежуточный элемент (16) предпочтительно выполнен в виде промежуточной пластины.
16. Способ выполнения манипуляций с деформируемыми деталями (2), в частности с легкодеформируемыми плоскими деталями (2), посредством рабочего органа по одному из предшествующих пунктов, при этом на первой операции соответствующую деталь (2) захватывают из накопителя, на второй операции осуществляют драпирование захваченной детали (2) путем соответствующего управления приводным устройством (7, 8), и на третьей операции драпированную деталь (2) складывают или укладывают в заданную позицию.
| DE 4210024 A1, 30.09.1993 | |||
| Присос для самонаклада | 1979 |
|
SU1025628A1 |
| КЛАПАННОЕ УПЛОТНЕНИЕ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2462636C2 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |

