113
Изобретение относится к машиностроению, а именно к транспортирующим и распаково Чным устройствам, и может быть применено при автомати- зации процессов, связанных с транспортировкой, упаковкой и распаковкой ящиков со штучными предметами.
Цель изобретения - расширение технологических возможностей путем обеспечения открывания ..
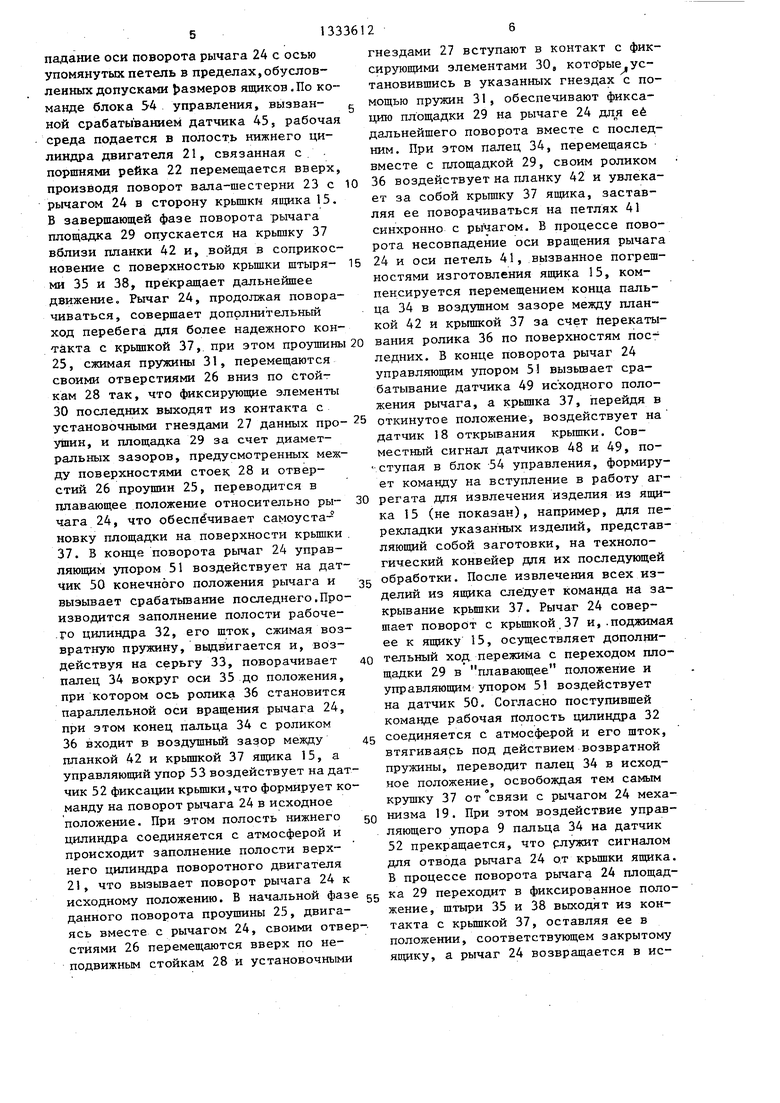
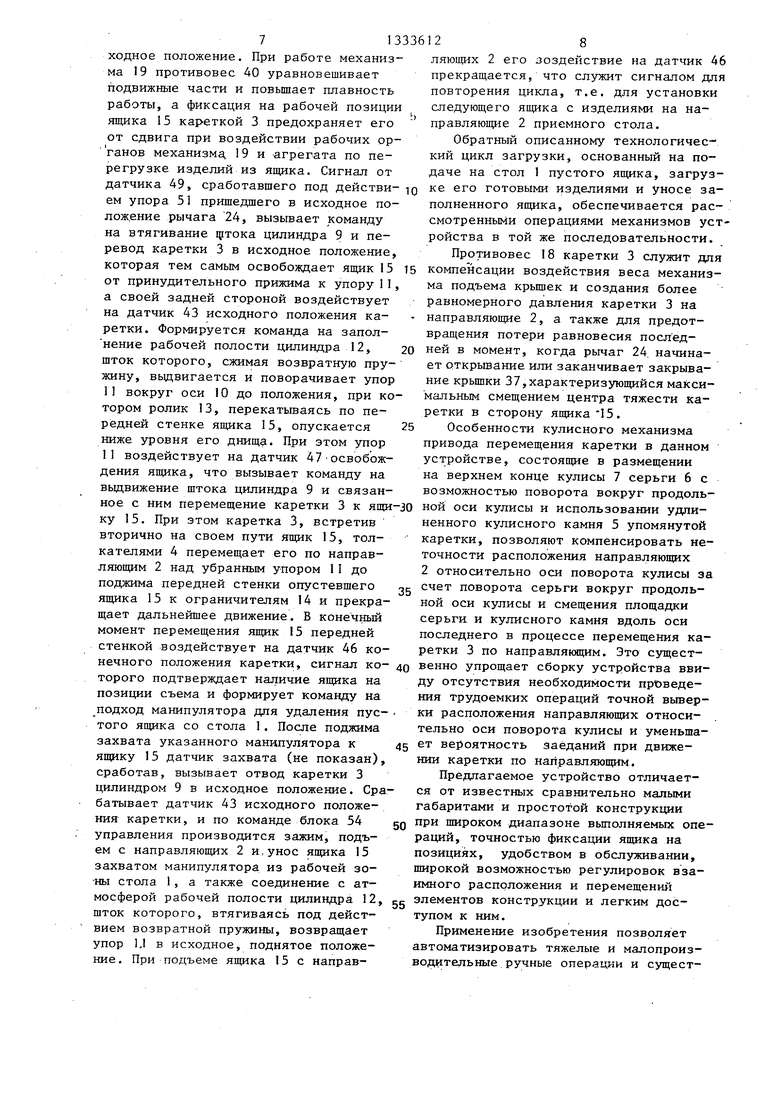
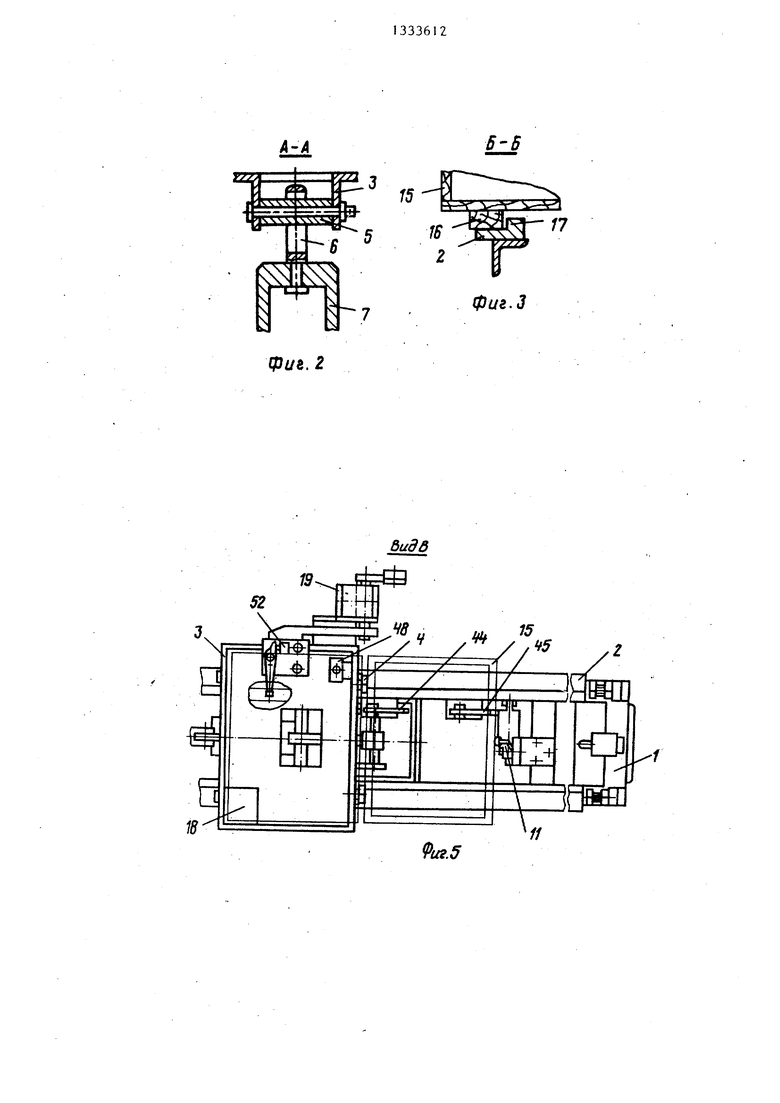
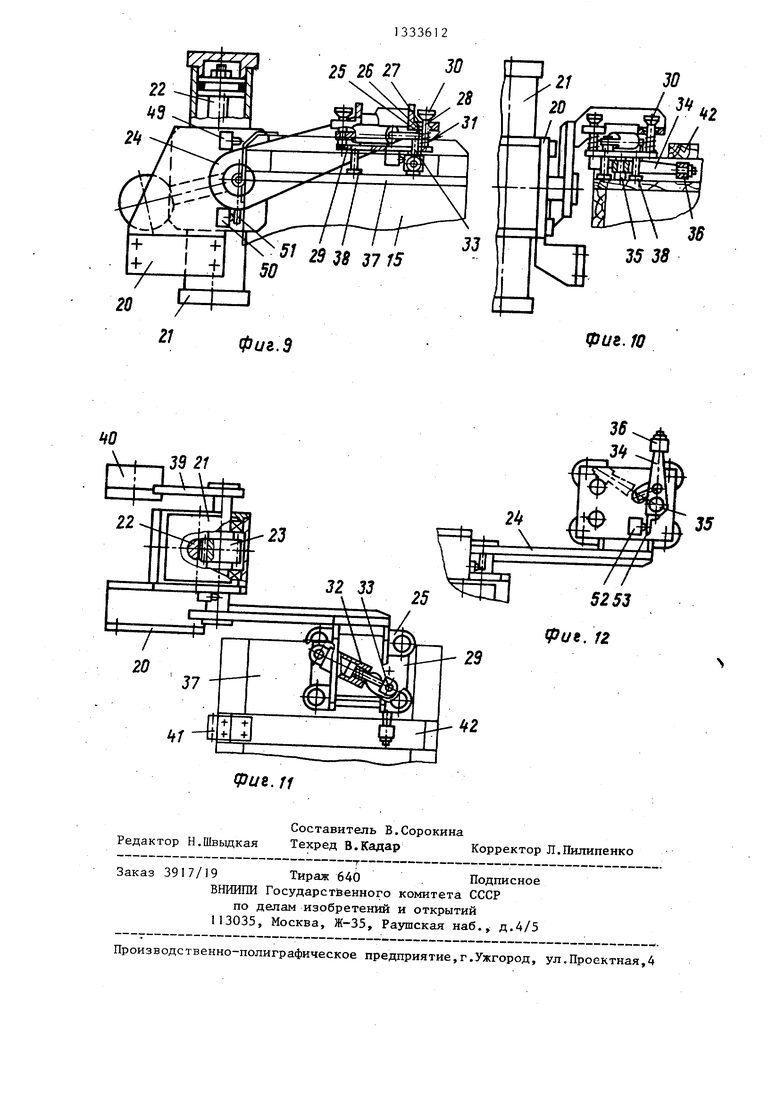
На фиг.1 схематически изображено устройство для подачи ящиков с откидными крьш1ками и их закрывания в исходном положении, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.3 разрез Б-Б на фиг.1; на фиг.4 - устройство с зафиксированным на рабочей позиции ящиком, механизм подъема крышек с зафиксированной в открытом положении крьшпсой ящика, общий вид; на фиг.5 - вид В на фиг.4; на фиг.б- устройство в конечном положении,ящик на позиции съема, механизм подъема крьш1е-к в исходном положении, общий вид; на фиг. 7 - разрез Г-Г на фиг.6; на фиг.8 - разрез Д-Д на фиг.7; на фиг.9 - механизм подъема крышек с зафиксированной в закрытом положении крьппкой ящика; на фиг. 10 - то же, вид с боку; на фиг.П - то же, вид сверху; на фиг. 12 - то же,, вид снизу Устройство для подачи ящиков включает в себя приемный стол I, на горизонтальных н аправляющих 2 которого помещены с возможностью возвратно- поступательного движения каретка 3 с регулируемыми в продольном направлении стола толкателями 4, шарнирно соединенными с нижней частью каретки кулисным камнем 5, связанным с серьгой 6, размещенной с возможностью поворота вокруг продольной оси на верхнем конце кулисы 7, нижним концом шарнирно установленной на основа НИИ 8 стола 1 с возможностью поворота вокруг горизонтальной оси под действием шарнирно связанного с указанной кулисой штока рабочего цилиндра 9, шарнирно закрепленного на столе 1 В средней части поверхности стола 1 на оси 10 установлен поворотный упор 11 (фиг.8), нижним концом шарнирно связанный со штоком рабочего цилиндра 12 одностороннего действия с пружинным возвратом, шарнирно соединенного со столом 1. Верхний конец упо- Р&. 11 оснащен роликом 13, установленным с возможностью враЕ1;ения вок
5
0
5
5
0
5
0
0
5
руг оси, перпендикулярной оси поворота упора. На столе 1. за упором П, дальше от каретки 3,, смонтированы обращенные навстречу толкателям 4 регулируемые ограничители 14. Ящик 15 имеет на нижней поверхности полозья 16 для взаимодействия с центрирующими элементами i 7 направляющих 2 (фиг.З). На каретке 3 размещен регулируемый противовес 18, который уравновешивает механизм 19 подъема крышек, закрепленный на боковой стороне каретки 3 ближе к толкателям 4 посредством кронштейна 20.
Механизм 19 йодъема крьшдек содержит паворотньй двухпозиционный поршневой двигатель 21, включающий в себя зубчатую рейку 22 на штоке, жестко связанном с поршнями верхнего и нижнего цилиндров двигателя, находящуюся в зацеплении с валом-шестерней 23, на одном из выходных концов которого закреплен поворотньш рычаг 24. На свободном конце рычага 24 имеются проушины 25, в отверстиях 26 которых, снабженных коническими установочными гнездами 27, размещены с возможностью перемещений стойки 28, каждая из которых жестко связана одним концом с площадкой 29„ имеет жестко установленный на другом конце фиксирующий элемент 30, сферической поверхностью запада ищий в гнездо 27, и витую пружину сжатия 31, размещенную на стойке меукд.у площадкой 29 и соответствующей проушиной 25 . Между стойками 28 на плош,адке 29 шарнирно смонтирован рабочий цилиндр 32 одностороннего действия с пружинным возвратом, штоком ыарниркс связанный посредством серьги 333 проходящей через окно площадки 29s с пальцем 34, установленным на противоположной, стороне площадки с возможностью поворота вокруг оси 35 и кмеюшрм на свободном конце ролик 36 с осью, перпендикулярной оси 35. Ось 35 одновременно является одним из штырей для взаимодействия площадки 29 с крышкой 37 ящика 15. Другие штыри 38 установлены за пределами сек | ора поворота пальца 34. На. противоположном выходном конце вала-шестерни 23 жестко закреплен рычаг 39 с регулируемым противовесом 40. У ящика 15, обслуживаемого механизмом 19, крьш1ка 37 установлена шарнирно на петлях 41 и снабжена планками 42, выполняющими
3 ,
роль рукояток, причем между планками и наружной поверхностью крышки 37 имеется воздушный зазор, равный толщине промежуточных элементов, на которых установлены указанные планки.
На столе 1 позади каретки 3 установлен датчик 43 исходного положения каретки, между датчиком 43 и упором П - датчик 44 наличия ящика, ближе к упору I1 - датчик 45 фиксации ящика, а у ограничителей 14 размещен датчик 46 конечного положения каретки. Датчик 47 освобождения ящика размещен в зоне поворота упора 11 (фиг.7). На каретке 3 установлен датчик 48 открывания крышки, на кронштейне 20 в зоне поворота рычага 24 - датчик 49 исходного положения рычага и датчик 50 конечного положения рычага, взаимодействующие с управляющим упором 51 рычага 24, а на площадке 29 - датчик 52 фиксации крьш1ки с возможностью взаимодействия с управляющим упором 53, закрепленным на пальце 34.
На поверхностях и во внутренних объемах стола 1, не использованных дпя размещения описанных неподвижных и подвижньгк узлов и не занимаемых последними при их перемещениях в крайние положения, располагаются блок 54 управления и другие элементы управления (не показаны).
Устройство работает следующим образом.
В исходном положении шток рабочего цилиндра 9 втянут, и связанная с кулисой 7 каретка 3 удерживается в крайнем левом положении, упор 11 поднят под действием возвратной пружины рабочего цилиндра 12, рейка 22 штока с поршнями цилиндров механизма 19, находясь в крайнем нижнем положении, удерживает рычаг 24 в исходном (откинутом) положении, палец 34 повернут в сторону рычага 24 под действием возвратной пружины цилиндра 32, а , площадка 29 зафиксирована на рычаге
24за счет удержания фиксирующих элементов 30 стоек 28 в установочных гнездах 27 отверстий 26 в проушинах
25указанного рычага под действием пружин 31.
Ящик 15 со штучными изделиями устанавливается манипулятором (не по- каз-ан) на направляющие 2 между кареткой 3 и упором II, причем центрирующие элементы 17 оказываются между
336124
полозьями .6 .щика 15. При этом ящик 15 своим днищем воздействует на датчик 44 наличия ящика, при срабатыва- НИИ которого блок 54 управления дает команду на заполнение сжатым воздухом (маслом) бесштоковой полости рабочего цилиндра 9, шток которого, выдвигаясь, производит поворот кулисы Q 7, которая, воздействуя через серьгу 6 на кулисньш камень 5, перемещает каретку 3 к ящику 15 по направляющим 2. В процессе движения каретка 3, встретив на своем пути ящик 15, тол- 15 кателя и 4 упирается в его заднюю стенку и, продолжая двигаться, перемещает ящик по направляюш м 2 до упора 11. В процессе описанного перемещения внутренние поверхности полозьев 20 16 взаимодействуют с центрирующими элементами 17 направляющих 2, что предотвращает поперечное смещение ящика 15 по поверхности направляющих 2. При этом днище ящика 15 скользит 25 по приводному элементу датчика 44 и в заключительной фазе перемещения набегает на приводной элемент датчика 45 фиксации ящика, вызывая срабатывание последнего, чем подтверждает- 0 ся наличие фиксации ящика на столе 1, осуществляемой посредством его принудительного поджима толкателями 4 к ролику 13, и обеспечивается вступление в работу механизма 19 подъема крьшгек. Механизм 19 закреплен на каретке 3 таким образом, что ось вращения рычага 24 располагается на одной высоте с осью петель 41 крьш1ки 37, установленного на направляющих 2 ящи- 0 ка 15, выходной конец вала-шестерни 23 с закрепленным на нем рычагом 24 обращен в сторону продольной плоскости симметрии стола 1, причем внутренняя поверхность рычага 24 расположе- 5 на дальше от указанной плоскости,чем боковая стенка ящика 15, а выступающий внутренний край площадки 29 рычага 24 - ближе, чем указанная стенка, но несколько дальше, чем наруж- Q ная боковая грань планки 42 крышки 37. Вьшет толкателей 4 каретки 3 отрегулирован таким образом, что при ее поджиме к задней стенке ящика 15 ось врадения рь1чага 24 и ось петель g 41 ящика оказываются в одной вертикальной плоскости. Таким образом, указанные особенности конструкции обеспечивают при зафиксированном на рабочей позиции стола 1 ящике 15 сов35
513
падание оси поворота рычага 24 с осью упомянутых петель в пределах,обусловленных допусками 1)азмеров ящиков.По команде блока 54 управления, вызван- ной срабатыванием датчика 45, рабочая среда подается в полость нижнего цилиндра двигателя 21, связанная с поршнями рейка 22 перемещается вверх, производя поворот вала-шестерни 23 с рычагом 24 в сторону крьш1км яищка 15. В завершающей фазе поворота рычага площадка 29 опускается на крьш1ку 37 вблизи планки 42 и, войдя в соприкосновение с поверхностью крьш1ки штыря- ми 35 и 38, прекращает дальнейшее движение. Рычаг 24, продолжая поворачиваться, совершает дополнительный ход перебега для более надежного контакта с крьщ1кой 37,. при этом проушины 25, сжимая пружины 31, перемещаются своими отверстиями 26 вниз по стойкам 28 так, что фиксирующие элементы 30 послед1шх выходят из контакта с установочными гнездами 27 данных про- ушин, и площадка 29 за счет диаметральных зазоров, предусмотренных между поверхностями стоек; 28 и отверстий 26 проущин 25, переводится в плавающее положение относительно ры- чага 24, что обеспечивает самоустановку площадки на поверхности крьшгки 37. В конце поворота рычаг 24 управляющим упором 51 воздействует на датчик 50 конечного положения рычага и вызывает срабатьюание последнего,Производится заполнение полости рабоче- -Го цилиндра 32, его шток, сжимая возвратную пружину, выдвигается и, воздействуя на серьгу 33, поворачивает палец 34 вокруг оси 35 до положения, при котором ось ролика 36 становится параллельной оси вращения рычага 24, при этом конец пальца 34 с роликом 36 входит в воздушный зазор между планкой 42 и крьш1кой 37 ящика 15, а управляющий упор 53 воздействует на датчик 52 фиксации крьш1ки,что формирует команду на поворот рычага 24 в исходное положение. При зтом полость нижнего цилиндра соединяется с атмосферой и происходит заполненке полости верхнего цилиндра поворотного двигателя 21, что вызывает поворот рычага 24 к исходному положению. В начальной фазе данного поворота проушины 25, двигаясь вместе с рычагом 24, своими отверстиями 26 перемещаются вверх по неподвижным стойкам 28 и установочными
26
гнездами 27 вступают в контакт с фик- сируюпщми элементами 30, кото рые установившись в указанных гнездах с помощью пружин 31, обеспечивают фиксацию площадки 29 на рычаге 24 её дальнейшего поворота вместе с последним. При этом палец 34, перемещаясь вместе с площадкой 29, своим роликом 36 воздействует на планку 42 и увлекает за собой крышку 37 яш;ика, заставляя ее поворачиваться на петлях 41 синхронно с рычагом. В процессе поворота несовпадение оси вращения рычага 24 и оси петель 41, вызванное погрешностями изготовления ящика 15, компенсируется перемещением конца пальца 34 в воздушном зазоре между планкой 42 и крьппкой 37 за счет перекатывания ролика 36 по поверхностям последних. В конце поворота рычаг 24 управляюш;им упором 51 вызьшает срабатывание датчика 49 исходного положения рычага, а крьш1ка 37, перейдя в откинутое положение, воздействует на датчик 18 открывания крышки. Совместный сигнал датчиков 48 и 49, поступая в блок 54 управления, формирует команду на вступление в работу агрегата для извлечения изделия из ящика 15 (не показан), например, для перекладки указанных изделий, представ- собой заготовки, на технологический конвейер для их последующей обработки. После извлечения всех изделий из ящика следует команда на закрывание крьшгки 37. Рычаг 24 совершает поворот с крьш1кой,37 и, .поджимая ее к ящику 15, осуществляет дополнительный ход пережима с переходом площадки 29 в плавающее положение и управляющим упором 51 воздействует на датчик 50. Согласно поступившей команде рабочая полость цилиндра 32 соединяется с атмосферой и его шток, втягиваясь под действием возвратной пружины, переводит палец 34 в исходное положение, освобожД 1Я тем самым крушку 37 от связи с рычагом 24 механизма 19. При этом воздействие управляющего упора 9 пальца 34 на датчик 52 прекращается, что рлужит сигналом для отвода рычага 24 о.т крьш1ки яшяка. В процессе поворота рычага 24 площадка 29 переходит в фиксированное положение, штыри 35 и 38 выходят из контакта с крьшгкой 37, оставляя ее в положении, соответствующем закрытому ящику, а рычаг 24 возвращается в исходное положение. При работе механизма 19 противовес 40 уравновешивает подвижные части и повышает плавность работы, а фиксация на рабочей позиции ящика 15 кареткой 3 предохраняет его от сдвига при воздействии рабочих ор- ганов механизма 19 и агрегата по перегрузке изделий из ящика. Сигнал от датчика 49, сработавшего под действи- ем упора 51 пришедшего в исходное положение рычага 24, вызывает команду на втягивание щтока цилиндра 9 и перевод каретки 3 в исходное положение,
которая тем самым освобождает ящик 15 15 компенсации воздействия веса механизот принудительного прижима к упору I 1, а своей задней стороной воздействует на датчик 43 исходного положения каретки. Формируется команда на запол- нение рабочей полости цилиндра 12, 20 шток которого, сжимая возвратную пружину, вьщвигается и поворачивает упор 11 вокруг оси 10 до положения, при котором ролик 13, перекатываясь по передней стенке ящика 15, опускается 25 ниже уровня его днища. При этом упор 11 воздействует на датчик 47 Освобождения ящика, что вызывает команду на вьщвижение штока цилиндра 9 и связанное с ним перемещение каретки 3 к ящи-зо ной оси кулисы и использовании удлику 15. При этом каретка 3, встретив вторично на своем пути яш;ик 15, толкателями 4 перемещает его по направляющим 2 над убранным упором 1I до поджима передней стенки опустевшего ящика 15 к ограничителям 14 и прекращает дальнейшее движение. В конечш 1Й момент перемещения ящик 15 передней стенкой воздействует на датчик 46 конечного положения каретки, сигнал ко- до венно упрощает сборку устройства вви- торого подтверждает наличие ящика на ду отсутствия необходимости прЪведе-
позиции съема и формирует команду на подход манипулятора дпя удаления пустого ящика со стола 1. После поджима захвата указанного манипулятора к ящику 15 датчик захвата (не показан), сработав, вызывает отвод каретки 3 цилиндром 9 в исходное положение. Срабатывает датчик 43 исходного положения каретки, и по команде блока 54 управления производится зажим, подъем с направляющих 2 и,унос ящика 15 захватом манипулятора, из рабочей зо- ны стола 1, а также соединение с атмосферой рабочей полости цилиндра 12, шток которого, втягиваяс1з под действием возвратной пружины, возвращает упор 1,1 в исходное, поднятое положение. При подъеме ящика 15 с направ
ляющих 2 его воздействие на датчик 46 прекращается, что служит сигналом для повторения цикла, т.е. для установки следующего ящика с изделиями на направляющие 2 приемного стола.
Обратный описанному технологический цикл загрузки, основанный на подаче на стол 1 пустого ящика, загрузке его готовыми изделиями и уносе заполненного ящика, обеспечивается рассмотренными операциями механизмов устройства в той же последовательности.
Противовес I8 каретки 3 служит дпя
ма подъема крьш1ек и создания более равномерного давления каретки 3 на направляющие 2, а также для предотвращения потери равновесия последней в момент, когда рычаг 24. начинает открывание или заканчивает закрывание крьшки 37,характеризующийся макси- мальньм смещением центра тяжести каретки в сторону ящика 15.
Особенности кулисного механизма привода перемещения каретки в данном устройстве, состоящие в размещении на верхнем конце кулисы 7 серьги 6 с возможностью поворота вокруг продоль5
ненного кулисного камня 5 упомянутой каретки, позволяют компенсировать неточности расположения направляющих 2 относительно оси поворота кулисы за счет поворота серьги вокруг продольной оси кулисы и смещения площадки серьги и кулисного камня вдоль оси последнего в процессе перемещения каретки 3 по направляющим. Это сущестgg
ния трудоемких операций точной выверки расположения направляющих относительно оси поворота кулисы и уменьша45 ет вероятность заеданий при движении каретки по направляющим.
Предлагаемое устройство отличается от известных сравнительно малыми габаритами и простотой конструкции
QQ при широком диапазоне выполняемых операций, точностью фиксации ящика на позициях, удобством в обслуживании, широкой возможностью регулировок взаимного расположения и перемещений элементов конструкции и легким доступом к ним.
Применение изобретения позволяет автоматизировать тяжелые и малопроизводительные ручные операции и существенно повысить производительность труда.
Формула изобретения
1, Устройство для подачи ящиков с откидными крышками и их закрывания, содержащее приемный стол, толкатель для ящиков и механизм подъема крышек с консольно закрепленным поворотным рычагом, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения открывания крышек, толкатель установлен на каретке, смонтированной в горизонтальных направляющих, закрепленных на приемном столе, снабженном поворотными упорами для ящиков, а поворотный рычаг ме ханизма подъема крьшек закреплен на каретке и снабжен установленной на его свободном конце площадкой со штырями для взаимодействия с поверхностью крышки, при этом на площадке установлен палец для захвата-крышки, смонтированный с возможностью поворота в плоскости, перпендикулярной плоскости поворота рычага.
2.Устройство по п.1, о т л и ч а- ю ш; е е с я тем, что площадка со штырями установлена на поворотном рычаге посредством подпружиненных стоек, смонтированных в проушинах рычага с возможностью осевого перемещения ,
3.Устройство по п.1, о т л и ч а- ю щ е е с я тен, что на свободных концах упора приемного стола и пальца для захвата крьшки установлены ролики .
4.Устройство по п,1, о т л и ч а- ю щ е е с я тем, что палец для захвата крышки смонтирован на одном из штырей для взаимодействия с поверхностью крышки.


| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для открывания и закрывания откидной крышки ящика | 1985 |
|
SU1339050A1 |
| Устройство для подачи деталей | 1988 |
|
SU1569180A1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1986 |
|
SU1411192A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU612874A2 |
| Устройство для установки заготовок в пресс | 1988 |
|
SU1523233A1 |
| Установка для изготовленияОбОлОчКОВыХ СТЕРжНЕй | 1979 |
|
SU810364A1 |
| Устройство для изготовления обрезиненного кордного полотна | 1973 |
|
SU539510A3 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Устройство для подачи на шпалы подкладок | 1989 |
|
SU1670024A1 |
Изобретение относится к транспортирующим и распаковочным устройствам, и может быть применено при ав- .томатизации процессов, связанных с упаковкой и распаковкой ящиков со штучными предметами. Цель изобретения - расширение технологических возможностей путем обеспечения открывания -KpbmieK. Поворотньй рычаг 24 механизма подъема крьщ1ек закреплен на каретке 3 и снабжен площадкой 29, на которой установлен палец для захвата крьш1ки ящика, установленного манипулятором на направляющие 2 между кареткой 3 и упором I1 и сдвинутого толкателями 4 каретки 3 до соприкосновения с, роликом 1 3 упора 11 . 3 з.п. ф-лы, 12 ил. (Л futf
2 37 15
V
1
ffS
Фие.Г
А А
6 В
кал
UJ
фи.З
. Z
19
г
в
3 1 Z 12 13 LJl 11 ff7
u.S
.7
Фи.б
25 26 27 0
31
2it
фиг. 9
36
dS 38
фиг. Ю
hJФиг. n
Составитель В.Сорокина Редактор Н.Швыдкая Техред В.Кадар Корректор Л.Пилипенко
.-------- -- --
Заказ 3917/19 Тираж 640 . Подписное
ВНИИПИ Государст зенного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная,4
| Устройство для закрывания ящиков откидными крышками | 1982 |
|
SU1016221A1 |
