(54) ДВУХКООРДИНАТНЫЙ СТОЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный стол | 1980 |
|
SU948603A1 |
| Микроманипулятор | 1974 |
|
SU511200A1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| ВСЕСОЮЗНАЯ ПДТШНО-^^^^^''''^^'^^^^' | 1973 |
|
SU365238A1 |
| Автоматическая установка для присоединения проволочных выводов | 1985 |
|
SU1312869A1 |
| Координатный стол | 1987 |
|
SU1493437A1 |
| Устройство для ориентированного перемещения изделий | 1982 |
|
SU1018265A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
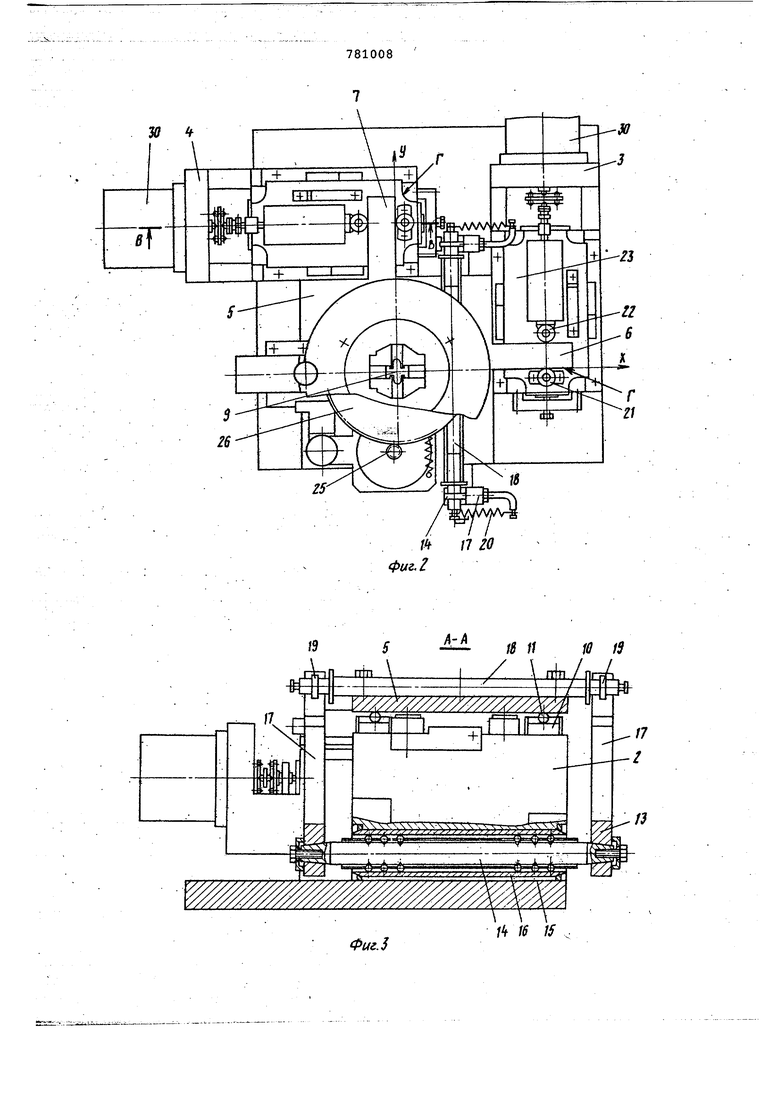
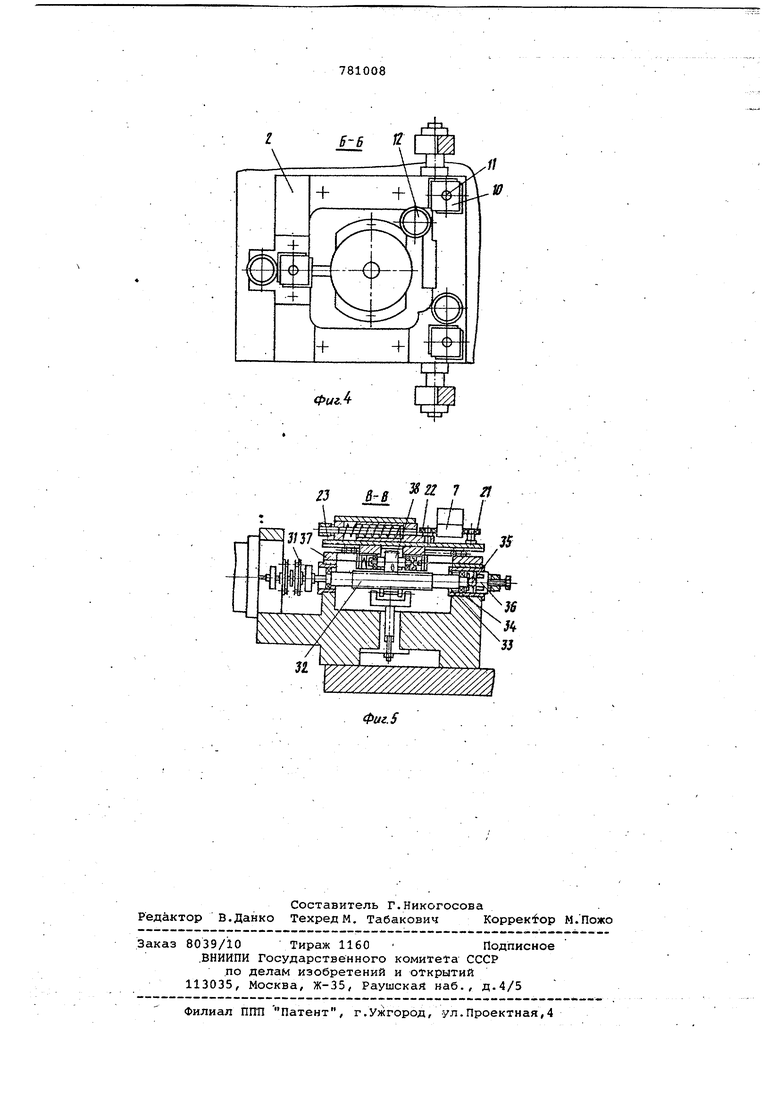
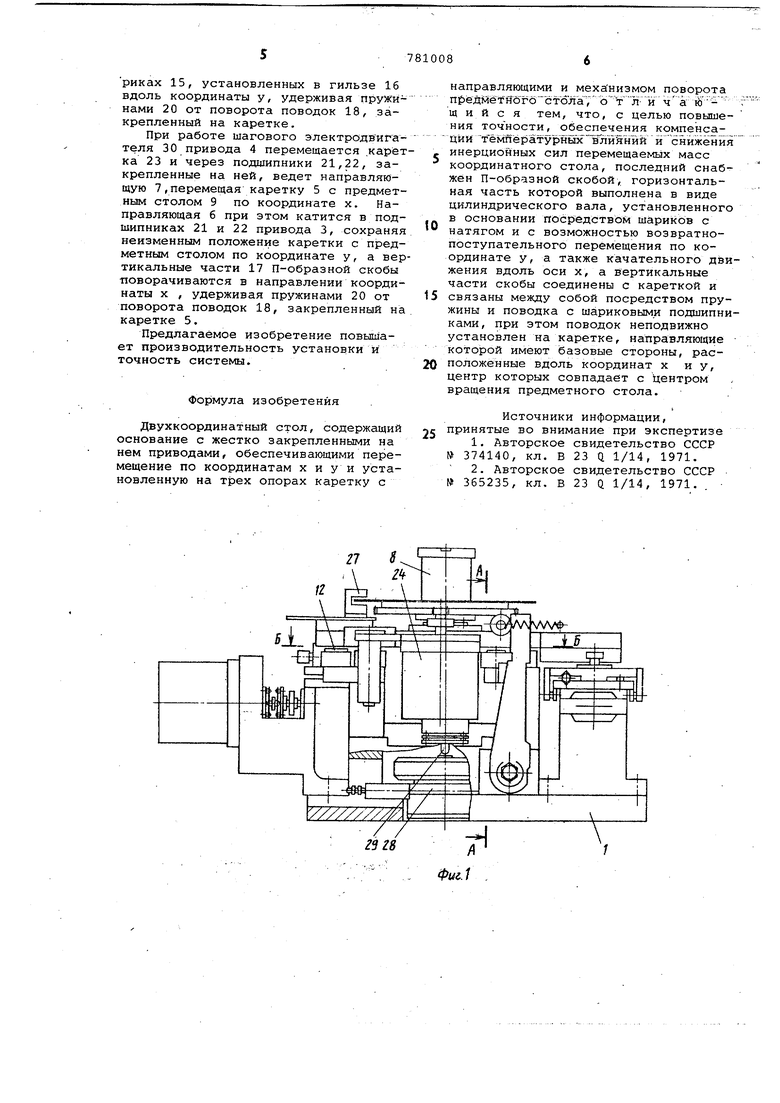
Изобретение относится к точной механике, а именно к мехайизмам, обеспечивающим линейные перемещения по двум координатам, и предназначено для автоматического присоединения проволочных выводов при производстве полупроводниковых приборов. Известен двухкоординатный стол с расположенными на основании механизмами привода стола по двум взаимно перпендикулярным направлениям, выпол ненныу И в виде naipa вйнт-гййка, при этом каждый из механизмов привода снабжен рычагом, один конец которого жестко соединен с ходовой гайкой, а другой через ролик взаимодействует с планкой, установленной на основании с возможностью перемещения в вертикальной плоскости от привода Однако этот двухкоординатный стол имеет повышенную инерционность перемещаемых масс.. Наиболее близким решением к предлагаемому является двухкоординатный стол, по направляющим основания кото рого от приводного двигателя, жестко закрепленного на основании, перемеща ются по одной из координат промежуто .ные салазки со вторым приводным двигателем, несущие направляющие для предметной плиты, при этом второй приводной двигатель также жестко закреплен на ОСНЬванйй, а хбдовая гайка приводимой им пары винт-гайка подвижно связана с жёстко сое дйненным с предметной плитой кронидтейном, проходящим через окно, выполненное в промежуточных салаэках 2 . недостатками указанного двухкоординатного стола являются: то, что при перемещении предметной плиты возникает трение скольжения, вследствие этого происходит быстрый износ поверхностей и потеряточности, а также повышенная инерционность перемещаемых масс. Кроме того, в сопряжениях призматический паз - шарик - плоскость в процессе работы происходит проскальзывание шариков и, как следствие, увеличение усилия перемещения.. . Цель настоящего изобретения - повышение точности, компенсация температурных влияний и снижение инерционных сил перемещаемых масс. Указанная цель достигается тем, что двухкоордиматный стол снабжен П-образной скобой, горизонтальная часть которой выполнена в виде цилйНдрического вала, установленного в основании посредством шариков с натягом, и с возможностью возвратно Пбступатель.ного перемещения по коор Ййна; гё у и кйчательногодвйжёнгия вдоль оси X, а вертикальные части скобы связаны с плоской кареткой через пружину и поводок с шариковы ми подшипниками,неподвижно установленный на каретке, направляющие которой имеют базовые стороны,расположенные вдоль координат х и у, центр которых совпадает с центром вращения предметного стола. На фиг.1 изображен общий вид дву йбОрДИНатного стола; на фиг.2 - то же, вид сверху; на фйг.З - разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.1;на фиг.5 - разрез В-В на фиг.2. Двухкоординатный стол содержит плиту 1, основание 2, приводы по координате х 3 и у 4, каретку 5 с направляющими 6 и 7 и механизмом поворота 8 с предметным столом 9. На плите 1 смонтированы приводы по координатам х и у, основание 2 с тремя опорными поверхностями 10, .На которые через шарики 11 установлена каретка 5. Каретка к опорам притягивается тремя постоя нными маг нитами 12. В основании 2 установлен П-образная скоба 13, горизонтальная часть которой выполнена в виде вала 14 и может перемещаться по координа те у на шариках 15, установленных с натягом в гильзе 16 параллельно плоскости каретки 5, а вертикальные части 17 П-образной скобы - качаться в направлении х при перемещении каретки по координате х. От поворота каретка удерживаетс П-образной скобой 13 через вертикал ные части 17 .и.поводок 18 с шариков ми подшипниками 19, жестко закрепле ный на каретке. Поводок 18 поджат к рычагам пружинами 20. Направление пёрёмещеНйя по координатам определя ется базовыми поверхностями Г регул руемых направляющих 6 и 7, которые поджаты к базовым подшипникам 21 подпружиненными подшипниками 22, уётаНовенными на подвижных каретках 23 приводов. - , - : , . С целью компенсации температурны влияний базовые поверхности- Г напра ЛЯЮ1ЦЙХ расположейы на линиях, проходящих через ось вращения предметного стола, которая совпадает с центром базовой систе.мьа координат, от которых ЭВМ рассчитывает траекторию движения координатного стола. Поэтому для получения трчности перемещений важно сохранение положени оси вращения пред1иетного столика. На каретке 5 установлен механизм поворота 8, который получает враще:ние от шагового электродвигателя 24 через зубчатые колеса 25 и 26. Исходное положение поворота контролируется фотодатчиком 27. Фиксация и расфиксация прибора на предметном столике производится от пневмоцилиндра 28 через шток 29. Приводы 3 и 4, по координатам конструктивно выполнены в Виде самостоятельных легко съемных взаимозаменяемых блоков.Шаговый электродвигатель 30 через муфту 31 передает вращение на ходовой винт 32. В осевом направлении винт поджат пружиной 33 через подшипник 34 -и шарик 35 к опорной поверхности упора 36. Подвижная каретка 23 с призматическим пазом поджимается к направляющей 37 пружинами и соединяется с винтом 32 через ролик 38, закрепленный на каретке. При вращении винта 32 ролик 38 вращается и перемещается поступательно вместе с кареткой 23. В данной конструкции вместо роликовой передачи возможна установка гайки. Двухкоординатный стол работает следующим образом. Обрабатываемый прибор автоматически подается и фиксируется на йрёдметном столе 9 в исходном положении координатного стола. За исходное положение принимается такое положение, когда ось вращенияпредметного стОла совпадает с перекрестием оАтической системы, т.е. с центром базовой системы координат. Расчет траекто.рии перемещения координатного стола ЭВМ производит от базовой системы координат, поэтому для получения точности важно сохранение положения оси вращения предметного стола. После фиксации прибора координатный стол подводит первую траверсу под инструмент, инструмент- опускается вниз, производит первую сварКУ и поднимается вверх, после чего координатный стол подводит под инструмент Первую плотцадку кристалла, инструмент опускается вниз и производит вторую сварку. Так происходит приварка первой перемычки. Аналогично производятся перемещения для приварки Остальнах перемычек, при этом рабОтаюТ шаговые электродвигатели по координатам х и у. При работе шагового электродвигателя 30 привода 3 перемещается каретка 23 и через подшипники 21 и 22, закрепленные на ней, ведет направляющую 6, перемещая каретку 5 с предметным столом 9 по координате у. Направляющая 7 при этом пёрёмещается в подшипниках 21 и 22 привода 4, сохраняя неизменным положение каретки 5 с предметным стОлом по координате х, а вертикальные части 17 П-образной скобы перемещаются с валом 14 на шариках 15, установленных в гильзе 16 вдоль координаты у, удерживая пружинами 20 от поворота поводок 18, закрепленный на каретке.
При работе шагового электродв игателя 30 привода 4 перемещается .каретка 23 и через подшипники 21,22, закрепленные на ней, ведет направляющую 7,перемещая каретку 5 с предметным столом 9 по координате х. Направляющая 6 при этом катится в подшипниках 21 и 22 привода 3, сохраняя неизменным положение каретки с предметным столом по координате у, а вертикальные части 17 П-образной скобы поворачиваются в направлении координаты X , удерживая пружинами 20 от поворота поводок 18, закрепленный на каретке 5.
Предлагаемое изобретение повышает производительность установки и точность системы.
Формула изобретения
Двухкоординатный стол, содержащий основание с жестко закрепленными на нем приводами, обеспечивающими перемещение по координатам х и у и установленную на трех опорах каретку с
направляющими и механизмом поворота прёдКёт ого стбла, 6тп- ii ч а и ; щ и и с я тем, что, с целью повышения точности, обеспечения компенсаций температурных ТйЛийнйй и снижения инерционных сил перемещаемых масс координатного стола, последний снабжен П-образной скобой, горизонтальная часть которой выполнена в виде цилиндрического вала, установленного в основании посредством шариков с
0 натягом и с возможностью возвратнопоступательного перемещения по координате у, а также качательного движения вдоль оси X, а вертикальные части скобы соединены с кареткой и
5 связаны между собой посредством пружины и поводка с шариковыми подшипниками, при этом поводок неподвижно установлен на каретке, направляющие которой имеют базовые стороны, расположенные вдоль координат х и у, центр которых совпадает с центром вращения предметного стола.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 374140, кл. В 23 Q 1/14, 1971.
Ift /7 20 фиг. I
f 16 15
Фиг. 5
Л : ,f 7 f
