1
Изобретение относится к автоматическим, манипуляторам с программным управлением в частности к модулям движения, и может быть использовано при компоновке манипуляторов, построенных по агрегатному принципу.
Известен модуль промышленного робота, содержащий привод с ходовым винтом, связанным с гайкой, укрепленной в исполнительном органе, установленном в направляющих корпуса 1.
Недостатком известного,модуля являются ограниченные функциональные возможности, обеспечивающие только однокоординатное движение исполнительного органа - возвратное программируемое линейное перемещение. Для получения двухкоординатного движения, например линейного перемещения и вращения вокруг оси, манипулятор должен содержать, по крайней мере, два модуля, один из которых осуществляет линейное перемещение, а другой - поворот.
Цель изобретения - расщирение функциональных возможностей модуля промыщленного робота.
Для достижения поставленной цели он снабжен установленным на корпусе механизмом изменения вида движения исполнительного органа, который выполнен в виде электромагнитного устройства и блока опорных роликов, установленных в державках, контактирующих с поверхностью исполнительного органа, причем оси одной половины роликов установлены параллельно, а другой половины роликов - перпендикулярно направлению линейного перемещения исполнительного органа, и, по крайней мере, два ролика со взаимно перпендикулярными осями подпружинень, а их державки являются якорями электромагнитного устройства.
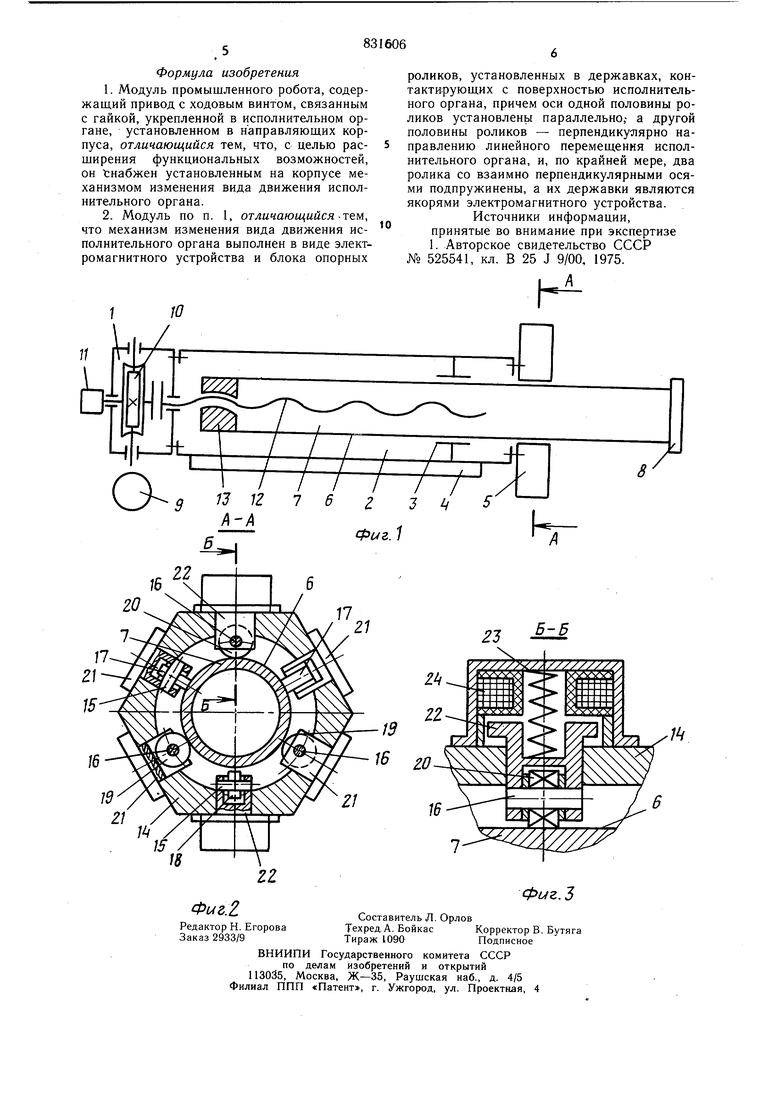
На фиг. 1 представлена кинематическая схема модуля промыщленного робота; на
S фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Модуль промышленного робота содержит привод 1, прикрепленный к корпусу 2, который снабжен направляющими 3 и привалочным фланцем 4, который служит для установки модуля на несущий его агрегат. На корпусе 2 установлен механизм 5 изменения вида движения исполнительного органа, охватывающий направляющую поверхность б исполнительного органа 7, установленного в направляющих 3. Исполнительный орган 7 несет фланец 8, унифицированный с агрегатом, устанавливаемым на модуль. Привод 1 содержит электродвигатель 9, кинематически связанный передаточным механизмом 10 с датчиком 11 положения и ходовым винтом 12, который связан с гайкой 13, укрепленной в исполнительном органе 7.
Механизм 5 изменения вида движения исполнительного органа (фиг. 2), выполненный в виде блока опорных роликов, содержит корпус 14, в котором на осях 15 и 16 установлены ролики 17-20, охватывающие направляющую поверхность 6 исполнительного органа 7. Оси 15 роликов 17 и 18 установлены перпендикулярно направлению линейного перемещения исполнительного органа, а оси 16 роликов 19 и 20 - параллельно направлению линейного перемещения в державках 21 и 22.
Державки 21 жестко прикреплены к корпусу 14, а державки 22 (фиг. 3) установлены с возможностью осевого перемещения в направлении, перпендикулярном направлению линейного перемещения исполнительного органа. Ролики 18 и 20 могут быть прижаты к направляющей поверхности 6 исполнительного органа 7 с помощью пружин 23 или отведены от нее при взаимодействии катушек 24 электромагнитов с державками 22. Электродвигатель 9, датчик 11 положения и катущки 24 запитаны от системы управления (на чертеже не показана),
При сборке механизма 5 изменения вида движения неподвижные ролики 17 и 19 подгоняются к направляющей поверхности 6 исполнительного органа 7 с минимальным зазором, равным зазору в паре направляющие 3 - направляющая поверхность 6, допускающим в режимах отработки движений при взаимодействии с одним из подпружиненных роликов 18 или 20 контакт либо с роликами 17 и 18, имеющими оси 15, установленные перпендикулярно направлению линейного перемещения, либо с роликами 19 и 20, имеющими оси 16, установленные параллельно направлению линейного перемещения.
Модуль движения работает в режимах линейного перемещения, поворотного движения и позиционирования с заданной угловой и линейной ориентацией. Первые два режима осуществляют при включении электродвигателя 9 и подаче напряжения на одну из катушек 24 электромагнитов, а последний - при обесточивании элементов 9 и 24.
Режим линейного перемещения осуществляется следующим образом.
По команде системы управления отводится ролик 20 от направляющей поверхности 6 исполнительного органа 7. При подаче напряжения на катушку 24 она притягивает к себе державку 22, несущую ось 16 и
ролик 20, преодолевая усилие пружины 23. Исполнительный орган 7 контактирует по направляющей поверхности 6 только с роликами 17 и 18, оси 15 которых установлены перпендикулярно направлению линейного перемещения. Эти ролики допускают линейное перемещение исполнительного органа и препятствуют его повороту. После включения электродвигателя 9 через передаточный механизм 10 движение передается на ходовой винт 12 и гайку 13, при этом вращательное движение винта преобразуется в поступательное движение гайки и исполнительного органа 7. В процессе линейного перемещения датчик 11 положения сравнивает текущие линейные координаты с заданными, а после отработки заданной величины линейного перемещения подает сигналы на отключение электродвигателя и катушки, закладывает в память робота информацию о линейном положении исполнительного органа и сбрасывается на ноль.
Режим поворотного движения осуществляется следующим образом.
По команде системы управления отводится ролик 18. При подаче напряжения на катушку 24 она притягивает к себе державку 22, несущую ось 15 и ролик 18, преодолевая усилие пружины 23. Исполнительный орган 7 контактирует по направляющей поверхности 6 только с роликами 19 и 20, оси 16 которых установлены параллельно направлению линейного перемещения.
Эти ролики препятствуют линейному перемещению и допускают поворотное движение исполнительного органа. После включения электродвигателя 9 движение через передаточный механизм 10 передается на ходовой винт 12 и гайку 13. Так как гайка вместе с исполнительным органом застопорена в осевом направлении, ходовой винт и исполнительный орган 7 начинают поворачиваться. Программируемое поворотное движение контролируется датчиком 11 положения. Цикл движения завершается обесточиванием двигателя и катущки, запоминанием заданного углового положения на ноль показаний датчика.
Режим позиционирования с заданной угловой и линейной ориентацией осуществляется следующим образом.
При обесточенных элементах 9 и 24 пружины 23 через державки 22 и оси 15 и 16 прижимают ролики 18 и 20 к направляющей поверхности 6 исполнительного органа 7. Благодаря сцеплению роликов и направляющей поверхности исполнительный орган сохраняет СБОЮ первоначальную ориентацию.
Применяемый в модуле промышленного робота механизм изменения вида движения исполнительного органа позволяет осуществлять последовательное двухкоординатное движение, что упрощает компоновочную схему агрегатного робота исключением из нее как минимум одного модуля.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ ТОЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 1998 |
|
RU2133188C1 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Рука манипулятора | 1983 |
|
SU1076276A1 |
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| ЛИНЕЙНЫЙ АКТУАТОР И ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2700562C1 |
| Устройство для поштучной выдачи плоских заготовок | 1987 |
|
SU1426681A1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |
| Устройство управления частотой вращения коленчатого вала двигателя внутреннего сгорания | 1984 |
|
SU1183700A1 |
