Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая рулевой привод (РП), гироскоп инерциальный с датчиком и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И, второй вход которого соединен с выходом гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и со вторым входом элемента ИЛИ, первый вход которого соединен с выходом "-Y" ГСН, а его выход соединен со вторым входом второго элемента И, и через второй инвертор со вторым входом третьего элемента И, выходы второго и третьего элементов И соединены со входами первого и второго усилителей мощности соответственно, выход "+Y" ГСН соединен с первым входом третьего элемента И и через первый инвертор с первым входом второго элемента И, выходы "+Z" и "-Z" соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления РП соответственно, вторые входы первой, второй, третьей и четвертой обмоток управления соединены с источником питания бортовой аппаратуры.
Недостатком данной системы наведения является большое время отработки начального рассогласования.
Это связано с тем, что вследствие технического рассеивания ошибки определения координат цели, ошибок топопривязки огневой позиции и других факторов снаряд может подлетать в зону "Захвата" цели как с недолетом, так и с перелетом.
При этом в случае перелета выбираемый промах осуществляется сверху, вследствие чего ГСН формирует на участке отработки начального рассогласования команды "Вниз", а под действием сигналов компенсации силы тяжести вектор управляющей перегрузки, действующей на снаряд, направлен вверх.
Но система наведения прототипа построена таким образом, что во время действия сигнала компенсации силы тяжести ее величина уменьшается на величину команды "Вниз", а сама команда в этот момент в обмотке управления не проходит, в результате этого вектор управляющей перегрузки за счет действия, хотя и уменьшенной, команды компенсации силы тяжести направлен "Вверх".
В результате чего при больших промахах увеличивается время отработки начального рассогласования, что приводит к снижению вероятности выбора начального промаха, а следовательно, и к снижению точности наведения.
Задачей предлагаемого изобретения является повышение точности наведения управляемого снаряда за счет исключения влияния сигнала компенсации силы тяжести на участке отработки начального рассогласования.
Решение поставленной задачи достигается тем, что в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный с датчиком и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И, второй вход которого соединен с выходом гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и со вторым входом элемента ИЛИ, первый вход которого соединен с выходом "-Y" ГСН, а его выход соединен со вторым входом второго элемента И, выход "+Y" ГСН соединен с первым входом третьего элемента И и через первый инвертор с первым входом второго элемента И, выход второго инвертора соединен со вторым входом третьего элемента И, выходы второго и третьего элементов И соединены соответственно со входами первого и второго усилителей мощности, выходы "+Z" и "-Z" ГСН соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления РП соответственно, вторые входы которых соединены с источником питания бортовой аппаратуры, введен четвертый элемент И, первый вход которого соединен с выходом "Запрет" ГСН, второй его вход соединен с выходом элемента ИЛИ, а его выход соединен со входом второго инвертора, при этом датчик гироскопа выполнен оптронным.
На чертеже приведена структурная схема системы наведения управляемого снаряда, где:
1 - головка самонаведения, выполненная, например, как в прототипе;
2 - гироскоп инерциальный, содержащий оптронный датчик, состоящий из токозадающего резистора 4, светодиода 5, шторки 6, фотодиода 7, погрузочного резистора 8 и компаратора 9;
3 - рулевой привод, выполненный, например, как в прототипе, 10, 12, 15, 16 - элементы И, 11 - элемент ИЛИ, 13, 14 - инверторы, выполненные, например, на микросхемах серии 561 (В.Л. Шило. Популярные цифровые микросхемы. - М.: "Радио и связь", 1987);
17, 18, 19, 20 - усилители мощности, выполненные, например, как в прототипе.
Работает система наведения управляемого снаряда следующим образом.
Производится выстрел, задействуется источник питания бортовой аппаратуры и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 2, выходят на режим батареи питания ГСН, раскрываются рули, отделяется блок носовой, открывая входной зрачок ГСН. По действием вращения снаряда и набором угла пеленга снарядом шторка 6 гироскопа на частоте вращения снаряда начинает периодически закрывать и открывать световой поток между светодиодом 5 и фотодиодом 7, а на погрузочном резисторе 8 формируется сигнал типа меандр, который с помощью компаратора 9 нормируется по амплитуде.
Так как плоскость прокачки шторки 6 ориентирована в вертикальной плоскости, то на выходе гироскопа 6 формируется сигнал компенсации силы тяжести, который поступает на второй вход первого элемента И10.
При подлете снаряда к цели и приеме отраженных от нее импульсов лазерного излучения ГСН формирует после анализа сигнал "Захват", который поступает с выхода ГСН на первый вход первого элемента И10. Одновременно по выходам ГСН "-Y", "+Y", "+Z" и "-Z" формируются сигналы управления рулевым приводом.
Сигнал "Захват" разрешает прохождение сигнала компенсации силы тяжести с выхода первого элемента И10 на вход "Компенсация" ГСН и на второй вход элемента ИЛИ 11, на первый вход которого поступает сигнал "-Y" с ГСН. После логического суммирования сигнал с выхода элемента ИЛИ 11 поступает на вторые входы второго элемента И15 и четвертого элемента И12, на первый вход которого поступает сигнал "Запрет", с ГСН, при этом, пока идет отработка начального рассогласования, сигнал "Запрет" соответствует Лог.0, а когда отработка начального рассогласования заканчивается, ГСН формирует сигнал "Запрет", соответствующий "Лог.1". Пока действует на выходе "Запрет" ГСН сигнал "Лог. 0", сигнал на выходе четвертого элемента И12 равен сигналу "Лог. 0", который, поступая через второй инвертор 14 на второй вход третьего элемента И16, разрешает прохождение сигнала "+Y", поступающего на его первый вход. С выхода третьего элемента И16 сигнал "+Y" поступает на вход второго усилителя мощности 18, с выхода которого сигнал "+Y" поступает на вторую обмотку управления 22 рулевого привода.
Одновременно сигнал "+Y", поступая на вход первого инвертора 13 и на первый вход второго элемента И15, блокирует прохождение сигнала компенсации силы тяжести на вход первого усилителя мощности 17 на время действия этой команды, уменьшая его величину на величину сигнала "+Y", разрешая прохождение этого сигнала на рули, как было сказано выше, через элемент И15.
Вследствие чего суммарный сигнал "Вниз" превышает величину сигнала компенсации силы тяжести и фактически исключает его влияние на управление на участке отработки начального рассогласования, что увеличивает скорость отработки начального промаха.
Сигналы "+Z" и "-Z" с выхода ГСН поступают соответственно на входы третьего 19 и четвертого 20 усилителей мощности, с выходов которых эти сигналы поступают на третью 23 и четвертую 24 обмотки рулевого привода.
При этом осуществляется наведение снаряда практически только по сигналам "-Y", "+Y", "+Z", и "-Z" с ГСН.
При поступлении сигнала "Запрет" с ГСН с уровнем "Лог.1" по окончании отработки начального рассогласования, этот сигнал, поступая на первый вход четвертого элемента И12, разрешает прохождение через его второй вход сигнала компенсации силы тяжести на вход второго инвертора 14, а с выхода последнего сигнал "Лог. 0" компенсации силы тяжести блокирует прохождение сигнала "+Y" на вход второго усилителя мощности 18 на время действия сигнала компенсации силы тяжести.
При этом осуществляется наведение снаряда под действием как сигналов с ГСН, так и под действием сигнала компенсации силы тяжести до поражения цели.
Т.o. введение четвертого элемента И с соответствующими связями позволило уменьшить время отработки начального промаха и тем самым повысить точность наведения.
Источник информации
1.152-мм выстрел 3ВОФ64(3ВОФ93) с осколочно-фугасным управляемым снарядом 3ВOФ39 и зарядом 1 (уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000 ТО (3ВОФ93.00.00.000 ТО)". - М.: Военное издательство, 1990, стр. 56-64.5
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
Изобретение относится к области вооружения, в частности - к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Техническим результатом является повышение точности наведения управляемого снаряда. Технический результат достигается тем, что система наведения управляемого снаряда содержит рулевой привод, гироскоп инерциальный и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И, второй вход которого соединен с выходом гироскопа инерциального. Выход первого элемента И соединен со входом "Компенсация" головки самонаведения и со вторым входом элемента ИЛИ, первый вход которого соединен с выходом "-Y" головки самонаведения, а его выход соединен со вторым входом второго элемента И. Выход "+Y" головки самонаведения соединен с первым входом третьего элемента И и через первый инвертор - с первым входом второго элемента И. Выходы второго инвертора соединен со вторым входом третьего элемента И. Выход второго и третьего элементов И соединены соответственно со входами первого и второго усилителей мощности, выходы "+Z" и "-Z" головки самонаведения соединены со входами третьего и четвертого усилителей мощности соответственно. Выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода соответственно, вторые входы которых соединены с источником питания бортовой аппаратуры. Введен четвертый элемент И, первый вход которого соединен с выходом "Запрет" головки самонаведения, второй его вход соединен с выходом элемента ИЛИ, а его выход соединен со входом второго инвертора. В гироскопе установлены шторка, светодиод и фотодиод с образованием оптронной связи между ними, причем шторка установлена с возможностью вращения с частотой вращения снаряда и периодического перекрытия светового потока между светодиодом и фотодиодом, при этом фотодиод является выходом гироскопа. 1 ил.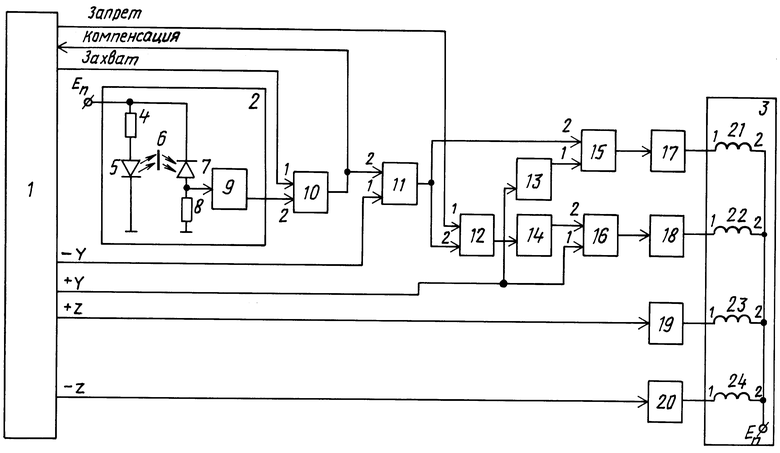
Система наведения управляемого снаряда, содержащая рулевой привод, гироскоп инерциальный и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И, второй вход которого соединен с выходом гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" головки самонаведения и со вторым входом элемента ИЛИ, первый вход которого соединен с выходом "-У" головки самонаведения, а его выход соединен со вторым входом второго элемента И, выход "+У" головки самонаведения соединен с первым входом третьего элемента И и через первый инвертор с первым входом второго элемента И, выход второго инвертора соединен со вторым входом третьего элемента И, выходы второго и третьего элементов И соединены соответственно со входами первого и второго усилителей мощности, выходы "+Z" и "-Z" головки самонаведения соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода соответственно, вторые входы которых соединены с источником питания бортовой аппаратуры, отличающаяся тем, что в нее введен четвертый элемент И, первый вход которого соединен с выходом "Запрет" головки самонаведения, второй его вход соединен с выходом элемента ИЛИ, а его выход соединен со входом второго инвертора, при этом в гироскопе инерциальном установлены шторка, светодиод и фотодиод с образованием оптронной связи между ними, причем шторка установлена с возможностью вращения с частотой вращения снаряда и периодического перекрытия светового потока между светодиодом и фотодиодом, при этом фотодиод является выходом гироскопа инерциального.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Военное издательство, 1990, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| US 4588145, 13.05.1986 | |||
| DE 3414911 А1, 24.10.1985 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕННОГО СОСТОЯНИЯ КОНСТРУКЦИЙ ЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2003 |
|
RU2226641C1 |

