Изобретение относится к способу предупреждения опасности наездов, с помощью которого в дорожном движении можно уменьшить опасность наездов.
Особенно большая доля ДТП, связанных с гибелью и ранением людей, а также материальным ущербом, приходится на наезды. Правда, в последние десятилетия были достигнуты большие успехи в усовершенствовании пассивных средств защиты, благодаря которым уменьшаются последствия ДТП, в частности для пассажиров автомобилей. Здесь можно упомянуть зоны деформации кузова, ремни безопасности, подголовники и надувные подушки.
Дальнейшие разработки ставшего известным приблизительно в 20-е годы и законодательно введенного затем тормозного сигнала, напротив, почти не прогрессируют. Тормозные сигналы стали лишь немного светлее и больше не загораются, как только тормозная педаль пройдет определенный холостой путь без торможения автомобиля. В США недавно предусмотрен третий тормозной сигнал в середине автомобиля.
Основные недостатки известных тормозных сигналов не удалось, однако, устранить этими усовершенствованиями. Тормозные сигналы загораются только при нажатии тормозной педали, а не при движении автомобиля накатом, т.е. при замедлении за счет сброса газа или включения дополнительного моторного тормоза или электродинамического, работающего на вихревых токах тормоза- замедлителя, и не при замедлении за счет сопротивления воздуха. Эти причины могут привести как при высокой скорости (преимущественно за счет сопротивления воздуха), так и при низкой скорости (преимущественно за счет тормозного момента двигателя) к замедлению 1,5-2 м/с2. При ненагруженном грузовом автомобиле и одновременном приведении в действие моторного тормоза и электродинамического, работающего на вихревых токах тормоза- замедлителя могут быть достигнуты значения даже свыше 3 м/с2, и все это без тормозного сигнала. Эти замедления соответствуют уже 15-30% замедления при экстренном торможении на сухой дороге и 50-100% замедления при экстренном торможении на заснеженной дороге. Таким образом, уже только за счет сброса газа в течение нескольких секунд создается разность в скорости с движущимся сзади автомобилем, которая скрывает в себе опасность наезда без загорания тормозного сигнала.
Такая ситуация обостряется, в частности, во всех тех случаях, когда собственно процессу торможения (с тормозным сигналом) предшествует процесс движения накатом (без тормозного сигнала). Как раз при соблюдении достаточно большого интервала безопасности замедление без тормозного сигнала оптически почти не воспринимается, поскольку при большом удалении эффект пространственного зрения равен почти нулю. Кроме того, оптический эффект увеличения объекта (а именно движущегося впереди автомобиля) за счет приближения при большом удалении также минимальный и плохо различим, так как, например, при удалении 100 м за счет приближения на 10 м происходит увеличение лишь на 11%. При удалении 20 м, однако, за счет приближения на 10 м, величина движущегося впереди автомобиля удвоится.
Кроме того, из-за отсутствия раннего предупреждения именно в начале необходимого торможения движущегося сзади автомобиля теряется драгоценное время, поскольку потерянный в этот же отрезок времени тормозной путь при высокой скорости намного длиннее, чем по окончании процесса торможения при низкой скорости. Действующий при большом удалении эффект раннего предупреждения никак не достигается именно обычным тормозным сигналом.
Другой недостаток обычного тормозного сигнала основан на том, что предупреждение за счет его загорания длится лишь до тех пор, пока происходит торможение или приводится в действие тормозная педаль. Однако срабатывание тормоза еще не устраняет опасности наезда, поскольку все еще имеется вызванная процессом торможения разность в скорости с движущимся сзади автомобилем. Тормозной сигнал приводит при выключении скорее к заблуждению, что опасность миновала.
Недостатком является также то, что интенсивность предупреждения у обычных тормозных сигналов не зависит от величины замедления при торможении. Это может, с одной стороны, привести к повышенной реакции испуга (например, резкое торможение при слишком малом интервале безопасности) и тем самым к ДТП. С другой стороны, однако, отсутствует также необходимая повышенная интенсивность предупреждения, которая, например, требовалась бы при экстренном торможении с большим замедлением.
В течение около 20 лет законодательно предписана так называемая система аварийной световой сигнализации. При этом речь идет о ручном включении всех четырех указателей поворота, которые тогда загораются и гаснут в такт. Это предписано для безопасности стоящих автомобилей на скоростных дорогах (например, в пробке) или при буксировке. Речь идет почти о непрерывном тормозном сигнале, который очень хорошо зарекомендовал себя, поскольку он включается опытными водителями на автомагистрали уже тогда, когда пробка или ДТП видны еще издалека. Недостаток этой системы, однако, в том, что ее приходится включать вручную и именно в случае экстренного торможения, т.е. в случае особенно повышенной опасности, когда не остается лишнего времени и водитель не должен отвлекаться дополнительными действиями. Также после наезда многие водители из-за шока или ранения не в состоянии включить систему.
Некоторые опытные водители предупреждают движущиеся сзади автомобили прерывистым торможением и за счет этого прерывистым включением тормозного сигнала (когда тормозная педаль нажата достаточно). Этот метод имеет, однако, тот большой недостаток, что его можно применять только при небольших замедлениях при торможении и достаточно длительном времени, а не тогда, когда опасность действительно близка и требуется большое замедление.
Другой разработкой, которую создают уже годы без заметного успеха, является так называемый дистанционный радар. При сокращении необходимого интервала безопасности движущимся сзади автомобилем радар включает в нем самом оптический или акустический сигнал или даже воздействует на него таким образом, что он автоматически замедляется. Недостатки радара многообразны и ниже поясняются вкратце. Акустическое или оптическое предупреждение (на панели приборов) скорее отвлекает внимание, чем повышает его, поскольку предупреждение, как это было бы целесообразно, не исходит от места, представляющего собой опасность, а именно от движущегося впереди автомобиля. Радар реагирует также не на особенно опасную разность в скорости, а лишь на сокращение интервала безопасности. Другой недостаток в том, что водитель слишком часто получает предупреждение, а именно и тогда, когда движущийся впереди автомобиль сокращает интервал безопасности. Здесь не требуется дополнительного предупреждения, поскольку процесс происходит очень заметно даже для менее внимательного водителя. Такие автоматическое торможение или выключение привода радаром было бы, кроме того, настолько сильным вмешательством в процесс движения, что оно во многих случаях даже могло бы вызвать ДТП.
Недавно было предложено сигнализировать об убирании газа (движение педали акселератора) оранжевым "тормозным сигналом" в качестве предварительного предупреждения к собственно красному тормозному сигналу. Преимущество этого метода состоит в том, что сигнализируются также замедления за счет сброса газа, а при сразу же начинающемся торможении продолжительность реакции сокращается на время, необходимое для перемещения ноги на тормозную педаль, т. е. на несколько десятых секунды. Недостаток этого устройства в том, что оно срабатывает при каждом, даже кратковременном сбрасывании газа и внимание водителей движущихся сзади автомобилей падает за счет избытка возбуждения. Эта схема создает поэтому опасность того, что число ДТП скорее возрастет, поскольку собственно процесс торможения красным тормозным сигналом не регистрируется больше достаточно однозначно.
Работы проводятся также над тем, чтобы сократить время срабатывания тормозных сигналов, составляющих обычно до достижения полной мощности 0,20 - 0,25 с. Это может происходить за счет подогрева слабым током, а также использования светодиодов вместо ламп накаливания. В обоих случаях время срабатывания можно сократить на 0,10 - 0,15 с. Это, конечно, небольшой прогресс, поскольку тормозной путь на скорости, например, 100 км/ч сокращается на 3 - 4,5 м, а на скорости 150 км/ч - пропорционально этому на 4,5 - 7 м. Описанные выше принципиальные недостатки обычного тормозного сигнала и этим не уменьшаются и не устраняются.
Известен способ предупреждения опасности наездов в дорожном движении, согласно которому при замедлении b автомобиля зажигают на нем предупредительный сигнал замедления и изменяют его интенсивность (DE, A1 3033546, кл. В 60 Q 1/44, 1981 [всего 22 стр.]).
Задачей изобретения является создание способа предупреждения опасности наездов в дорожном движении, благодаря которому уменьшается опасность наездов в дорожном движении или при прочих процессах торможения и устраняются или уменьшаются недостатки обычных тормозных сигналов и способов аварийной световой сигнализации.
Согласно изобретению, эта задача решается посредством признаков основного пункта формулы. Способ предупреждения опасности осуществляют таким образом, что определяют и запоминают уровень совокупной величины опасности ΣG наезда, исходящей от данного автомобиля для движущихся сзади автомобилей, а интенсивность предупредительного сигнала замедления изменяют в зависимости от уровня ΣG. Благодаря зависимости интенсивности предупреждения от величины значения опасности водитель движущегося сзади автомобиля получает особенно интенсивное предупреждение именно тогда, когда опасность наезда становится высокой, в некритических ситуациях, однако, его внимание не нагружается сверх меры так, чтобы он напрасно отвлекался и уставал из-за избытка возбуждения. При этом система должна срабатывать не при замедлении за счет нажатия тормозной педали, а уже при замедлении за счет приведения в действие моторного тормоза или электромагнитного, работающего на вихревых токах тормоза-замедлителя, а также при убирании газа. Предпочтительно, что система срабатывает лишь тогда, когда замедление превышает определенное относительно низкое значение, например, 0,5 м/с2. Ниже этого значения система не срабатывает напрасно и тем самым не слишком часто.
Предпочтительные усовершенствования описаны в зависимых пунктах формулы.
Предпочтительно предупредительный сигнал замедления зажигают прерывисто. Сигнал начинает мигать при превышении установленного предельного значения замедления, например, 0,5 - 1 м/с2. Это имеет то преимущество, что водитель движущегося сзади автомобиля получает предупреждение интенсивнее, как только движущийся впереди автомобиль тормозит сильнее.
Уровень совокупной величины опасности наезда ΣG определяют в зависимости от текущей и/или предшествующей величины замедления b.
Особенно предпочтительным при этом является определение уровня совокупной величины опасности наезда ΣG в зависимости от продолжительности предшествующего замедления t и/или пути S замедления, поскольку высокие значения ΣG могут возникнуть также за счет относительно медленного торможения с высокой скоростью в течение длительного отрезка времени или при длинном пути с замедлением до очень низкой скорости или даже до остановки. Особенно заметным это становится при небольшой плотности движения и больших расстояниях между автомобилями автомагистрали, поскольку замедление движущегося впереди автомобиля воспринимается нечетко из-за большого расстояния. При небольших расстояниях, напротив, уменьшение расстояния воспринимается намного четче за счет пространственного зрения и быстрого оптического увеличения движущегося впереди автомобиля.
Целесообразно уровень совокупной величины опасности наезда ΣG определять как функцию замедления b и времени t и/или пути S с замедлением, например, по формуле:
Поскольку, однако, по формуле S = V2/2b при повышенном замедлении тормозной путь S обратно пропорционален замедлению b, одновременно повышается опасность для движущегося сзади автомобиля.
По формуле
Это, однако, не учитывается, поскольку интеграл при обратно пропорциональном изменении b и t (по формуле t = V : b) получает то же значение. Целесообразно поэтому для определения уровня совокупной величины опасности наезда ΣG учитывать замедление b и/или отрезок времени t и/или путь S с замедлением, соответственно увеличивая и/или уменьшая, например, возводя в степень и/или извлекая корень. Это может осуществляться за счет того, что, например, значение замедления при торможении возводится в определенную степень. При возведении во вторую степень величина опасности ΣG2 при повышении замедления b тоже повышается, а именно обратно пропорционально длине пути с замедлением S, следующим образом:
Кроме того, можно, например, вместо того, чтобы в большей степени учитывать замедление за счет b2, в меньшей степени учитывать продолжительность t, например, за счет  , что дает схожий эффект. Само собой, можно также учитывать замедление или время в другой степени. Это, однако, является больше делом эмпирической оптимизации.
, что дает схожий эффект. Само собой, можно также учитывать замедление или время в другой степени. Это, однако, является больше делом эмпирической оптимизации.
По опыту, величина опасности возрастает со скоростью, при которой происходят наезды. При наезде автомобиля со скоростью, например, 30 км/ч (такой же по массе) неподвижный автомобиль последний в зависимости от деформации, уничтожения энергии и остаточной энергии немного ускоряется, однако, может быть легко снова заторможен (в случае если он совершает наезд на впереди стоящий автомобиль). Совершивший наезд автомобиль за счет столкновения также останавливается, так что, за исключением других возможных наездов, это столкновение завершено. Если же наезд происходит с той же разностью в скорости 30 км/ч при скорости, например, 150 км/ч для движущегося впереди автомобиля и 180 км/ч для движущегося сзади, то материальный ущерб, вызванный наездом, приблизительно такой же, что и при наезде на неподвижный автомобиль, поскольку уничтоженная энергия вычисляется по квадрату разности в скорости до и после столкновения. Как правило, однако, оба автомобиля при высокой скорости за счет столкновения или вызванной травмой или шоком реакции водителей заносит, так что сам по себе относительно безобидный наезд может вызвать одно или несколько последующих, значительно более тяжелых столкновений.
Также по другой причине исходящая от движущегося впереди автомобиля опасность значительно возрастает при повышенной скорости. Тормозной путь возрастает с квадратом скорости движения. Рекомендуемый законодательством, так называемый "половинный спидометрический интервал" достаточен поэтому лишь тогда, когда торможение движущегося впереди автомобиля происходит рабочим тормозом и тем самым приблизительно в тех же условиях. Если же, напротив, движущийся впереди автомобиль совершает наезд на неподвижное препятствие, так что торможение происходит приблизительно с нулевым тормозным путем, то с учетом определенного времени реакции торможение движущегося сзади с той же скоростью автомобиля происходит только при относительно низких скоростях без наезда.
Пример 1. Скорость обоих автомобилей v0 = 50 км/ч = 13,9 м/с; интервал a = 1/2v = 25 м; наезд первого автомобиля на неподвижное препятствие; время реакции t = 1 с; максимальное замедление при торможении b = 8,7 м/с2 (на сухой дороге):
- путь, пройденный за время реакции: S1 = v0•t = 13,9 • 1 = 13,9 м;
- остаточный тормозной путь: S2 = a - S1 = 25 - 13,9 = 11,1 м;
- разность в скорости: 
- скорость столкновения: vA = v0-Δv = 50-50 = 0 км/ч.
При полном использовании возможного замедления остаточного тормозного пути 11,1 м как раз достаточно для торможения движущегося сзади со скоростью 50 км/ч автомобиля без наезда до его остановки.
Пример 2. v0 = 100 км/ч = 27,8 м/с; a = 1/2 v = 50 м; t = 1c; b = 8,7 м/с2:
- путь, пройденный за время реакции : S1 = v0•t = = 27,8•1 = 27,8 м;
- остаточный тормозной путь: S2 = a - S1 = 50 - 27,8 = 22,2 м;
- разность в скорости: 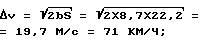
- скорость столкновения: vA = v0-Δv = 100-71 = 29 км/ч. .
При одинаковых времени реакции и замедлении, как в примере 1, несмотря на соблюдение предписанного интервала безопасности, происходит наезд со скоростью 29 км/ч.
При v0 = 150 км/ч скорость столкновения составляет 63 км/ч, а при v0 = 200 км/ч - 100 км/ч.
Само собой, целесообразно при нескольких следующих друг за другом отдельных замедлениях, например, bA, bB, bC ... определить сумму значений опасности, например
ΣΣG = ΣGA+ΣGв+ΣGc+ ...
У особенно предпочтительного варианта уровень совокупной величины опасности наезда ΣG определяют с принятием во внимание величины скорости движения перед замедлением. При исходной скорости v0 в м/с она эффективным образом учитывается с показателем 1,8 - 2,2, например: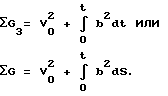
У другого предпочтительного варианта исполнения учитывается, кроме того, состояние дороги, т.е. коэффициент трения. Примеры 1, 2 относятся только к сухим и шероховатым дорожным покрытиям, на которых возможны большие замедления (здесь, например, 8,7 м/с2). Необходимый тормозной путь обратно пропорционален коэффициенту трения, а тем самым максимально возможному замедлению. Приняв мокрое состояние дороги с максимально возможным замедлением, например, 5 м/с2, скорости столкновения возрастают аналогично вышеприведенным примерам, что видно из следующей таблицы:
- при v0 = 50 км/ч vA = 12 км/ч;
- при v0 = 100 км/ч vA = 46 км/ч;
- при v0 = 150 км/ч vA = 84 км/ч;
- при v0 = 200 км/ч vA= 124 км/ч;
Особенно тяжелые последствия возникают, например, на обледенелой дороге при возможном замедлении, например, 1 м/с2; при этом скорости столкновения предельно возрастают:
- при v0 = 50 км/ч vA = 33 км/ч;
- при v0 = 100 м/ч vA = 76 км/ч.
В усовершенствованном варианте исполнения состояние дороги учитывается за счет того, что в период срабатывания антиблокировочной системы (АБС) совокупная величина опасности наезда ΣG дополнительно повышается. Это может происходить за счет коэффициента, соответствующего обратной величине среднего тормозного давления всех колесных тормозных цилиндров. Гидравлическое тормозное давление приблизительно пропорционально замедлению при торможении. Если из-за низкого коэффициента трения (между шиной и дорогой) до срабатывания АБС создается лишь небольшое тормозное давление, то это сигнализирует о полном использовании возможного замедления на гладкой дороге. Учет среднего тормозного давления имеет при этом то преимущество, что срабатывание АБС только на одном колесе или на колесах только одной стороны не переоценивается. Также в этом случае оптимизация должна происходить в значительной степени эмпирически.
У другого варианта уровень совокупной величины опасности наезда ΣG определяют с принятием во внимание величины скорости движения перед замедлением и расстояния до движущегося сзади автомобиля, которое измеряют с помощью дистанционного радара или ультразвукового дистанционного прибора в задней части автомобиля. Это имеет преимущество особой простоты, поскольку общее значение опасности ΣG4 пропорционально зависит от исходной скорости v0, например: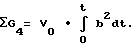
Если замедление при торможении состоит из нескольких отдельных, однако взаимосвязанных замедлений, то в качестве v0 целесообразно подставить скорость перед первым замедлением.
Учитывается также повышенная опасность наезда, возникающая за счет слишком большого приближения движущегося сзади автомобиля. При установке направленного назад радара общее значение опасности может дополнительно повыситься до такой степени, что определенный, зависимый от скорости минимальный интервал, например, половинный спидометрический интервал, будет меньше безопасного. Это может быть учтено, например, путем умножения общего значения опасности на коэффициент v0/S или, например, в общей степени на коэффициент (v0/S2). Преимущество в том, что при повышенной скорости уровень совокупной величины опасности возрастает пропорционально или сверхпропорционально скорости, как это соответствует действительности. Кроме того, за счет этого общее значение опасности изменяется обратно пропорционально или сверхпропорционально интервалу безопасности.
Уровень совокупной величины опасности наезда ΣG увеличивают и актуализируют путем непрерывной регистрации, интегрирования и ввода в память новых поступающих частичных величин опасности ΔG. .
Предпосылкой возможности оценки совокупной величины опасности (и частичных величин опасности) является непрерывная регистрация важных данных, в частности скорости, замедления (или ускорения), времени, функции АБС, тормозного давления и расстояния до движущегося сзади автомобиля, а также обработка данных в частичные величины опасности, интегрирование и расчет общей величины опасности, ввод ее в память и непрерывная актуализация за счет непрерывного ввода в память и стирания других данных. Измерение скорости и времени осуществляется целесообразно в соответствии с уровнем техники электронным путем. Для измерения замедления и ускорения имеются относительно дешевые электронные приборы. Функция АБС может быть перенесена непосредственно из блока управления АБС, а для измерения расстояния до движущегося сзади автомобиля имеется известный дистанционный радар. Обработка зарегистрированных данных для определения частичных величин опасности ΔG и соответствующей общей величины опасности ΣG происходит по нужным и эмпирически оптимизированным функциям в компьютере. Он принимает также непрерывно и очень быстро изменяющиеся вводимые данные. Решающим помимо целесообразной связи отдельных данных посредством описанных функций в общую величину опасности ΣG являются, в частности, и его актуализация.
Согласно изобретению, это осуществляется тем, что при каждом замедлении, по меньшей мере, при замедлениях выше определенного минимального значения, определяются соответствующие частичные величины опасности ΔG, интегрируются в соответствующую актуальную совокупную величину опасности ΣG и вводится в память компьютера. Величина каждой, введенной в память актуальной совокупной величины опасности является тогда определяющей для интенсивности предупреждения водителя движущегося сзади автомобиля предупредительным сигналом замедления. Из этого следует то решающее преимущество, что предупреждение происходит, как только введена в память совокупная величина опасности. Интенсивность предупреждения целесообразно связана по определенной функции с величиной введенной в память совокупной опасности. Отключение предупреждения происходит, следовательно, не так прежде за счет того, что при убирании ноги с тормозной педали одновременно гаснет тормозной сигнал, хотя возникшая за счет торможения разность в скорости и тем самым опасность еще существуют. Наоборот, за счет ввода в память совокупной величины опасности продолжает работать также система, предупреждающая о существующей еще опасности.
Уровень совокупной величины опасности наезда ΣG уменьшают и актуализируют путем интегрирования отрицательных частичных величин опасности ΔG. . Для того, чтобы однако, при уменьшении опасности уменьшилась и интенсивность предупреждения, в способе согласно изобретению учитываются также ускорения автомобиля, поскольку за счет следующего за торможением ускорения опасность наезда снова уменьшается. Поскольку при ускорении речь идет об отрицательном замедлении, обработка данных в компьютере происходит целесообразно по тем же функциям, так что при ускорении автомобиля за счет интегрирования отрицательных частичных величин опасности - ΔG постепенно происходит стирание введенного в память уровня совокупной величины опасности ΣG. . Целесообразно при этом вводить в память только положительные уровни совокупной величины опасности наезда ΣG, , поскольку от движущегося автомобиля всегда исходит положительная опасность, и иначе, например при торможении только что отъехавшего автомобиля, предупредительный эффект был бы подавлен отрицательным уровнем совокупной величины опасности, что повысило бы ее.
В другом предпочтительном исполнении системы согласно изобретению стирание введенного в память уровня совокупной величины опасности наезда ΣG производят с течением времени. Это может осуществляться очень просто за счет зависимого от времени стирания постоянными ступенями. Целесообразно, однако, стирание введенного в память уровня совокупной величины опасности наезда ΣG производить в функции времени или в зависимости от остаточного значения опасности. Из этого следует то преимущество, что, например, после торможения с низкой скорости время последующего предупреждения из-за более быстрого стирания намного короче, чем после торможения с высокой скорости, за счет чего учитывается повышенная опасность на автомагистрали. Также при резком торможении из-за учета замедления повышается значение опасности и тем самым время последующего предупреждения.
Это особенно важно при наездах (которые происходят, несмотря на систему предупреждения согласно изобретению, хотя и в меньшем количестве и в менее тяжелой форме), поскольку за счет предельно большого замедления при столкновении совокупная величина опасности в компьютере совершающего наезд автомобиля предельно повысится. Это сразу же приводит независимо от того, идет ли речь о заторможенном или незаторможенном наезде, к срабатыванию самой интенсивной ступени предупреждения с очень длинным временем последующего предупреждения.
Продолжительность стирания уровня совокупной величины опасности можно например, запрограммировать так, чтобы она была пропорциональна совокупной величине опасности или остаточного значения опасности. Из этого следует постоянная скорость стирания.
Для пояснения приведем несколько основных примеров.

Предположим:
- b1 = пост. = 1 м/с2 (например, движение по инерции без тормоза);
- b2 = пост. = 8 м/с2 (экстренное торможение);
- b3 = 10 - 450 м/с2 (наезд) ;
t в секундах:
- v0A = 60 м/с (автомагистраль 216 км/ч);
- v0B = 30 м/с (федеральная дорога 108 км/ч);
- v0S = 10 м/с (движение по городу 36 км/ч) ;
- v0K = 1 м/с (движение в пробке 3,6 км/ч).
Если выбрать, например, продолжительность предупреждения (в секундах), соответствующую данному остаточному числовому значению ΣG в (м2/с3), то возникают приблизительно следующие значения времени последующего предупреждения (без учета времени предупреждения при замедлении)(см. таблицу).
Конечно, при необходимости целесообразно эмпирически оптимизировать эти значения времени предупреждения и привести в соответствии за счет других функций. Стирание введенного в память уровня совокупной величины опасности наезда ΣG прерывают при определенном, имеющемся в памяти остаточном значении опасности ΣG. По истечении соответствующего времени система полностью выключается, после того как она уже до этого работала с уменьшающейся интенсивностью в соответствии с уменьшением величины еще имеющегося в памяти остаточного значения опасности.
Стирание общего значения опасности за счет протекания по времени может происходить, в принципе, и по другим функциям - это лишь вопрос теоретической и эмпирической оптимизации. У целесообразного варианта исполнения стирание введенного в память уровня совокупной величины опасности наезда ΣG прерывают при остаточном значении опасности, зависящем от скорости или среднего тормозного давления при срабатывании антиблокировочной системы. Преимущество следует усматривать в том, что у стоящих автомобилей предупредительная функция сохраняется хотя и на все более уменьшающемся уровне, однако без ограничения по времени.
Возможно также простое ограничение стирания при минимальном остаточном значении опасности; этот вариант имеет то преимущество, что предупреждение об опасности происходит по достижении остаточного значения также на длительный срок с минимальной интенсивностью.
Далее возможно, что стирание введенного в память уровня совокупной величины опасности наезда прерывают при определенном минимальном расстоянии до движущегося сзади автомобиля, зависящем от скорости. Это имеет то преимущество, что при замедлении или торможении не приходится поднимать совокупную величину опасности от нуля, а она с самого начала находится в памяти в соответствии со скрытой опасностью от скорости и/или слишком малого интервала безопасности. За счет этого интенсивность предупреждения в случае замедления возрастает быстрее.
В описанном исполнении возможно отключение предупредительной функции по достижении описанных выше остаточных значений за счет стирания. Это имеет преимущество ограничения предупреждения более опасными случаями. Можно также не прерывать предупредительную функцию, а даже сделать предупреждение сначала менее интенсивным, а затем более интенсивным в зависимости от того, насколько движущийся сзади автомобиль сокращает зависимый от скорости интервал безопасности.
В предпочтительном варианте исполнения стирание введенного в память уровня совокупной величины опасности наезда продолжают непрерывно или прерывают при вводе в память положительных частичных величин опасности. Это исключает негативное влияние ввода в память и стирания и обеспечивает более быстрый ввод в память необходимых значений опасности.
В другом варианте стирание за счет протекания по времени продолжается, пока стираемые значения находятся в памяти, т.е. и на фазе времени замедления. При этом, однако, стирание за счет протекания по времени, как и во всех других случаях, должно происходить заметно медленнее, чем ввод в память за счет движения автомобиля накатом, поскольку иначе положительные частичные значения опасности будут компенсированы равными по величине стираниями, хотя из-за возникающей разности в скорости создается опасная ситуация. В примерах приведенной таблицы при замедлении 1 м/с2 в каждом из четырех указанных случаев ввод в память произошел точно в тот отрезок времени, который соответствует времени последующего предупреждения. При относительно небольшом замедлении 1 м/с2, следовательно, и при одновременном стирании за счет протекания по времени в памяти не появилось бы больше ни одного значения опасности. В этом случае замедление 1 м/с2 было бы самым нижним порогом, при котором система начала бы работать. Из этого следует, что либо необходимо полностью прерывать стирание при вводе в память, либо ограничивать скорость стирания при вводе в память по меньшей мере долей скорости ввода.
За счет управления по другой функции (более медленное стирание) или при выключении стирания во время ввода в память можно, следовательно, рассчитать самый нижний порог замедления, при котором происходит ввод в память, например, до замедления всего 0,5 м/с2. Это пороговое значение можно также запрограммировать в зависимости от скорости и/или от среднего тормозного давления при срабатывании АБС. Это имеет то преимущество, что данное значение даже на гладком льду лежит еще заметно ниже очень малого тогда замедления, например всего 0,5 м/с2.
Что касается предупреждения водителя движущегося сзади автомобиля, то решение задачи состоит в том, чтобы сделать интенсивность предупреждения зависимой от величины опасности возможного наезда. Это возможно, как описано выше, за счет определения и ввода в память данного актуального общего значения опасности, мгновенная величина которого является мерой интенсивности предупреждения.
Как уже было описано выше, предупреждение происходит одним или несколькими мигающими предупредительными сигналами. В противоположность известному уровню техники срабатывания мигающих сигналов происходит не за счет тормозной педали, а уже за счет замедления, как только достигнуто определенное пороговое значение опасности. В предпочтительном варианте исполнения это значение дополнительно зависит от среднего тормозного давления при срабатывании АБС, так что, например, в опасной ситуации на гладком льду происходит значительно более раннее срабатывание системы, чем при нормальном состоянии дороги.
Это пороговое значение должно лежать намного ниже во избежание даже незначительных столкновений на малой скорости. В предпочтительном варианте исполнения управление пороговым значением опасности происходит в зависимости от скорости во избежание избытка возбуждения водителя при скоростном движении, когда речь идет в первую очередь о том, чтобы избежать столкновений с тяжелыми и тяжелейшими последствиями с больших расстояний и с большой разностью в скорости.
Согласно изобретению, кроме того, в зависимости от величины находящегося в памяти общего значения опасности продолжительность и частота мигания, а тем самым интенсивность предупреждения варьируются. При этом на выбор имеется несколько возможностей.
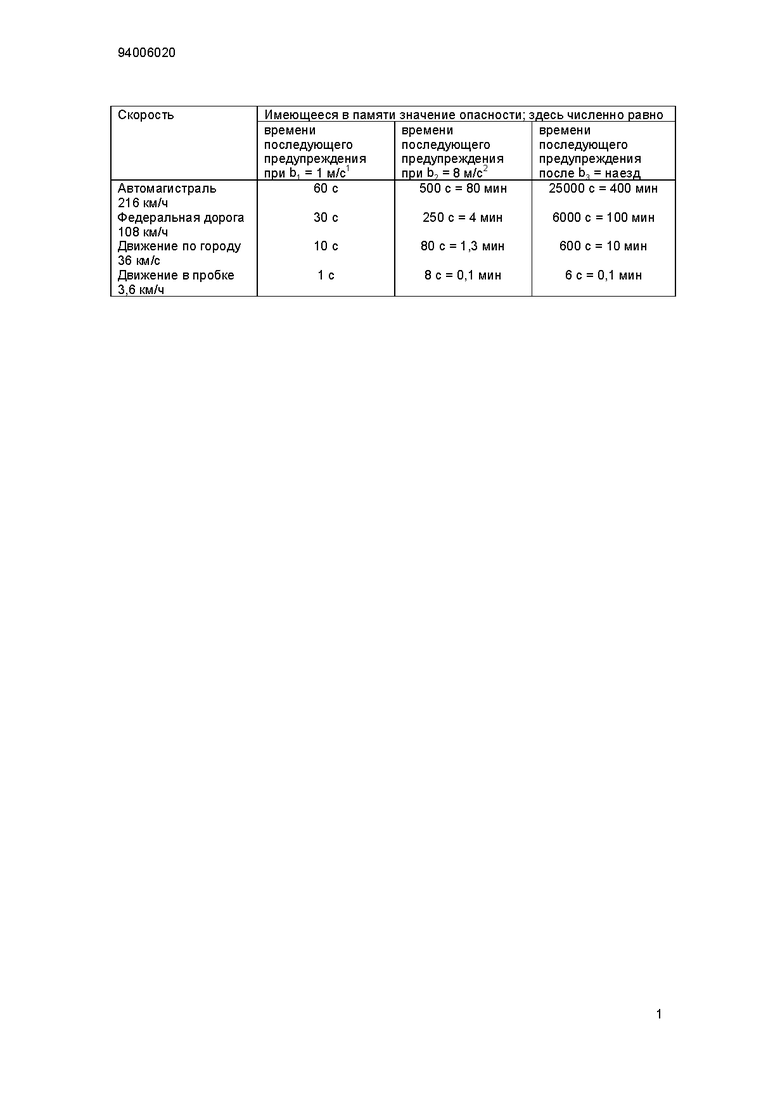
В первом варианте предупредительный сигнал замедления включается за счет превышения порогового значения опасности. При повышении общего значения опасности с определенными интервалами происходит короткое прерывание (предупредительный сигнал гаснет). При дальнейшем повышении общего значения опасности друг за другом со все более короткими интервалами следуют короткие одинаковые прерывания, как это изображено на фиг. 1. Продолжительность пауз, например, 1 с; благоприятное практическое значение следует установить путем эмпирической оптимизации. Максимально целесообразная интенсивность ограничена при этом, с одной стороны, технически за счет скорости охлаждения и нагрева лампы, а, с другой с стороны, физиологически за счет того, что слишком быстрое мигание все более воспринимается как постоянный свет, а не как дальнейшая интенсификация. Преимущество этого варианта исполнения состоит в том, что он близок обычному тормозному сигналу и что возможен относительно широкий диапазон регулирования, например, 1 : 5, поскольку нет длительных пауз. Недостаток состоит в том, что вызванный уже небольшим замедлением постоянный свет, как и прежде, вызывает одновременно довольно сильный предупредительный эффект, что не требуется; это означает, что очень малая интенсивность предупреждения за счет мигания невозможна.
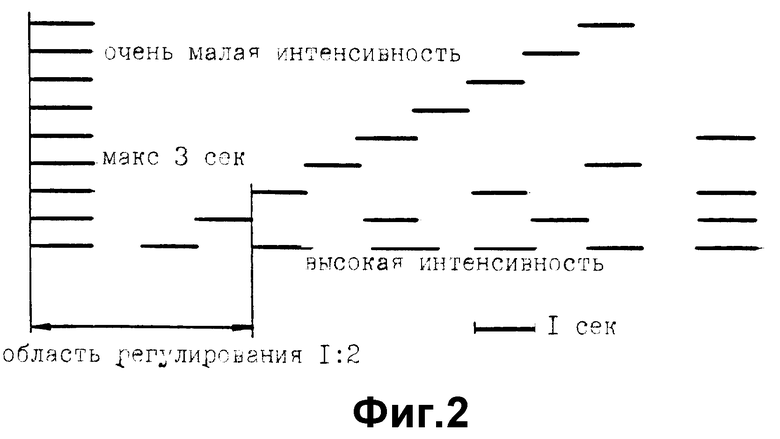
Во втором варианте, характеристика которого изображена на фиг. 2, при превышении предельного значения предупредительный сигнал загорается на короткое время, например, 1 с, после чего следует длительная пауза. При повышении общего значения опасности паузы между фазами свечения постоянной продолжительности сокращаются до тех пор, пока фазы свечения и паузы не будут приблизительно одинаковы. Преимущество этого варианта в том, что интенсивность предупреждения при меньшем общем значении опасности также соответственно мала за счет лишь короткого вспыхивания. Это, с одной стороны, предпочтительно на любой скорости, поскольку короткое слабое замедление не вызывает предупреждений с относительно высокой интенсивностью. С другой стороны, недостаток этого варианта в том, что паузы должны быть ограничены продолжительностью макс. 3 с, во время которой не происходит предупреждения. Это, в частности, наблюдается при небольшой интенсивности предупреждения во время движения в пробке и движения по городу и менее при скоростном движении, поскольку здесь при малой интенсивности в распоряжении имеется больше времени. До достижений одинаковых фаз свечения и пауз по 1 с диапазон регулирования составляет поэтому лишь 1:2.
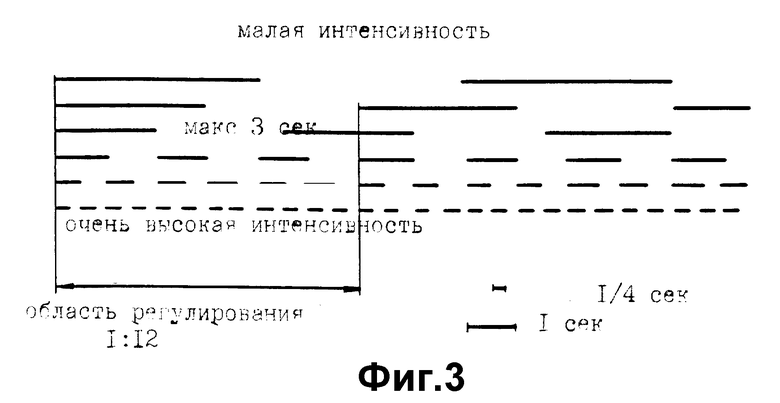
В третьем варианте, изображенном на фиг. 3, фазы свечения и паузы всегда одинаковы или приблизительно одинаковы и по мере возрастания общего значения опасности становится все короче, так что частота соответственно возрастает. Это имеет то преимущество, что при одинаковых светлых и темных фазах физиологическое воздействие возрастания частоты сильнее, чем если частота возрастает только за счет сокращения светлых или темных фаз. Это особенно важно при высоких общих значениях опасности. Кроме того, этот вариант имеет преимущество очень широкого диапазона регулирования около 1:12, если начать с пауз макс. 3 с и увеличить до частоты 2 в секунду. Это возможно с помощью светодиодов, поскольку они уже примерно через 0,1 с достигают своей полной мощности и также быстро снова гаснут. Физиологически такт в 0,5 с также очень заметен; ограниченное возрастание частоты еще целесообразно.
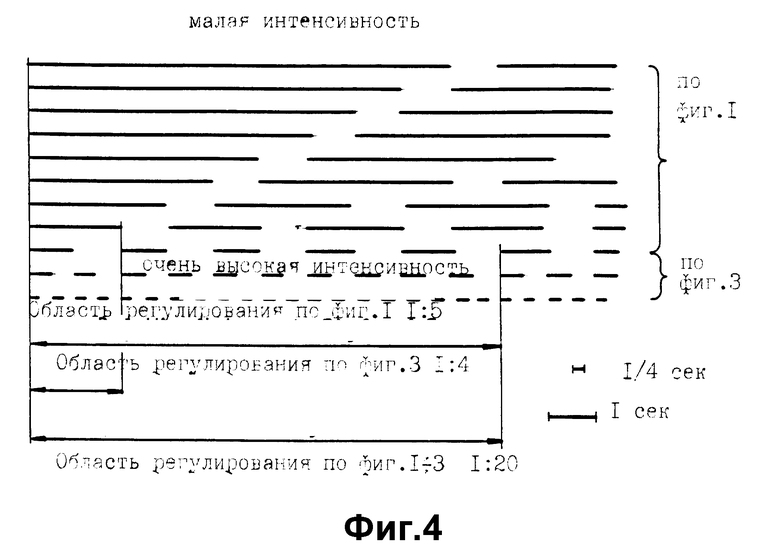
Четвертый вариант, состоящий в комбинировании второго и третьего вариантов, изображен на фиг. 4. При этом возрастание интенсивности происходит при низких и средних общих значениях опасности по системе варианта 1 с сокращающимися светлыми фазами. Как только светлые и темные фазы одинаковы, например по 1 с, они сокращаются при дальнейшем возрастании общего значения опасности по системе варианта 3, т.е. синфазно. Дальнейшее возрастание частоты, как описано выше, ограничено только технически и физиологически и при значениях 3 - 4 в секунду достигает максимума интенсивности. Преимущество этого варианта, в частности, в том, что он объединяет преимущества вариантов 1 и 3 и обеспечивает диапазон регулирования 1 : 20.
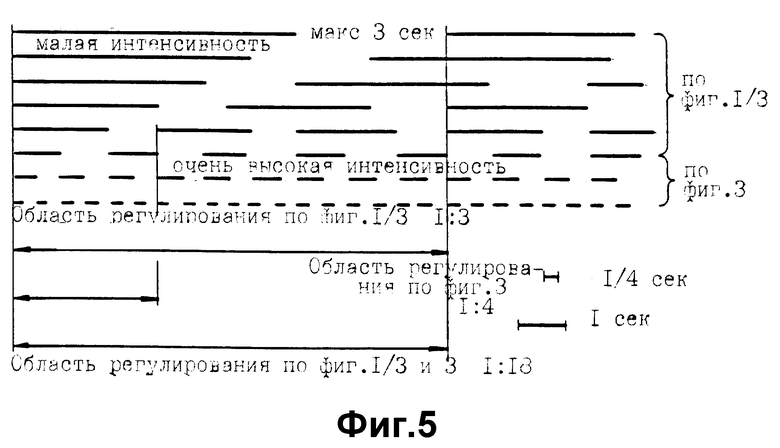
На фиг. 5 изображен еще один вариант, а именно при низкой интенсивности в качестве промежуточного решения между вариантами 1 и 3, например с 2/3 светлой фазы и 1/3 темной фазы продолжительностью макс. 3 с. По достижении темной фазы продолжительностью 1 с происходит переход на вариант 3 с одинаковыми светлыми и темными фазами. Также у этого варианта широкий диапазон регулирования, например, 1 : 18.
В другом предпочтительном усовершенствовании предупреждение начинается всегда со светлой фазы, как это изображено на фиг. 1 - 5, как только пороговое значение опасности превышено. Преимущество состоит в незамедлительном преобразовании опасности в предупреждении, что было бы невозможно, начиная предупреждение с паузы.
На практике используемый диапазон регулирования мигающего в изменяющемся ритме предупредительного сигнала ограничен тем, что частоту мигания 1 - 1,5 в секунду у ламп накаливания и 2 - 3 в секунду у светодиодов трудно превысить.
Также снижение частоты менее 1/10 в секунду или увеличение пауз более чем до 3 с будет во все большей степени приводить к потере целесообразно предупредительного эффекта. Вытекающий из этого диапазон регулирования интенсивности составляет тогда, как поясняется выше для вариантов 1 - 3, 1 : 2 - 1 : 12, а при их комбинировании - 1 : 20. Несмотря на это, требуется намного более широкий диапазон регулирования, с тем, чтобы при низких общих значениях опасности при движении в пробке интенсивность предупреждения была еще достаточно велика. Несмотря, однако, на самые высокие ступени предупреждения после экстренного торможения или наезда на автомагистрали, существует возможность дальнейшего увеличения. Данные таблицы показывают, что уже между самым низким требуемым значением опасности 1 (при v=l м/с и b=1 м/с2) и самым высоким значением 500 без наезда (при v=60 м/с и b = 8 м/с2) имеется соотношение 1 : 500. Из этого видно, что регулирования интенсивности только за счет частоты мигания далеко недостаточно. (В отношении таблицы надо пояснить, что время последующего предупреждения в секундах было приравнено к числовому значению общего значения опасности).
Согласно изобретению эта задача решается тем, что яркость предупредительного сигнала регулируют в зависимости от общего значения опасности. Также здесь установлен нижний предел, ниже которого эффективного предупреждения не происходит, поскольку оно вообще возникает только за счет резкого включения света. Яркость можно, однако, при высоких значениях опасности очень сильно увеличить, поскольку при максимальной опасности можно смириться с определенным ослеплением в пользу лучшего предупреждения. Диапазон регулирования 1 : 10, возможно даже еще шире, можно считать реальным. При его умножении на диапазон регулирования частоты мигания, например, 1 : 20, диапазон составит уже 1 : 200, что, правда, уже достаточно эффективно, однако еще требует улучшения.
Другое усовершенствование согласно изобретению связано с величиной светящейся поверхности. За счет числа ламп или светодиодов поверхность можно регулировать в большой степени: с лампами, например, без трудностей в диапазоне 1 : 10, а со светодиодами, например, в диапазоне 1 : 100.
За счет умножения на приведенный выше диапазон 1 : 200 получается общий диапазон 1 : 2000 - 1 : 20000. При этом необязательно, чтобы это происходило бесступенчато или небольшими ступенями, хотя технически это возможно. Намного важнее, чтобы несмотря на слабую интенсивность при небольшой опасности, было возможно ее повышение до предупреждения с максимальной интенсивностью. Из последней колонки таблицы видно, что при наездах с большой скоростью общие значения опасности могут составлять, например, 25000. У решения согласно изобретению следует, кроме того, учесть, что физиологическое восприятие оптических впечатлений протекает преимущественно по логарифмическим функциям, например 20-кратная мощность света не воспринимается как 20-кратная яркость, и поэтому чувствительность человеческого глаза к свету покрывает диапазон регулирования 1 : 10000.
Дальнейшее расширение диапазона регулирования яркости предложено согласно изобретению в зависимости от окружающей яркости. Это имеет то преимущество, что на солнечном свету предупредительные сигналы еще достаточно хорошо видны даже при более низкой ступени мощности, ночью же, кроме как при экстренных торможениях и наездах, не происходит ослепления.
Дальнейшее усовершенствование системы согласно изобретению состоит в расположении и оформлении предупредительных сигналов замедления так, чтобы не спутать их с задними фонарями или указателями поворота автомобилей. В принципе, предупредительный эффект за счет тормозного сигнала или сигнала замедления намного важнее указания предполагаемого изменения направления, поскольку процесс замедления, как правило, начинается без учета какого-либо предварительного предупреждения находящихся сзади участников движения и, кроме того, представляет собой непосредственное повышение опасности за счет возникновения разности в скорости. В противоположность этому указание поворота имеет для находящихся сзади участников движения больший смысл информации, но тем не менее и определенную предупредительную функцию перед возможным процессом торможения. Кроме того, в полную противоположность процессу торможения изменение направления может осуществляться только тогда, когда это не вызывает опасности для движущегося сзади автомобиля или не принуждает водителя к какой-либо реакции. Поворот движущегося впереди с такой же скоростью автомобиля к тому же совершенно безопасен, если он происходит без торможения (например, на ответвлении автомагистрали). Хотя следовательно, предупреждение о замедлении для движущихся сзади автомобилей намного важнее, чем указание поворота, следует избегать путаницы, и это в тем большей степени, чем выше интенсивность предупреждения.
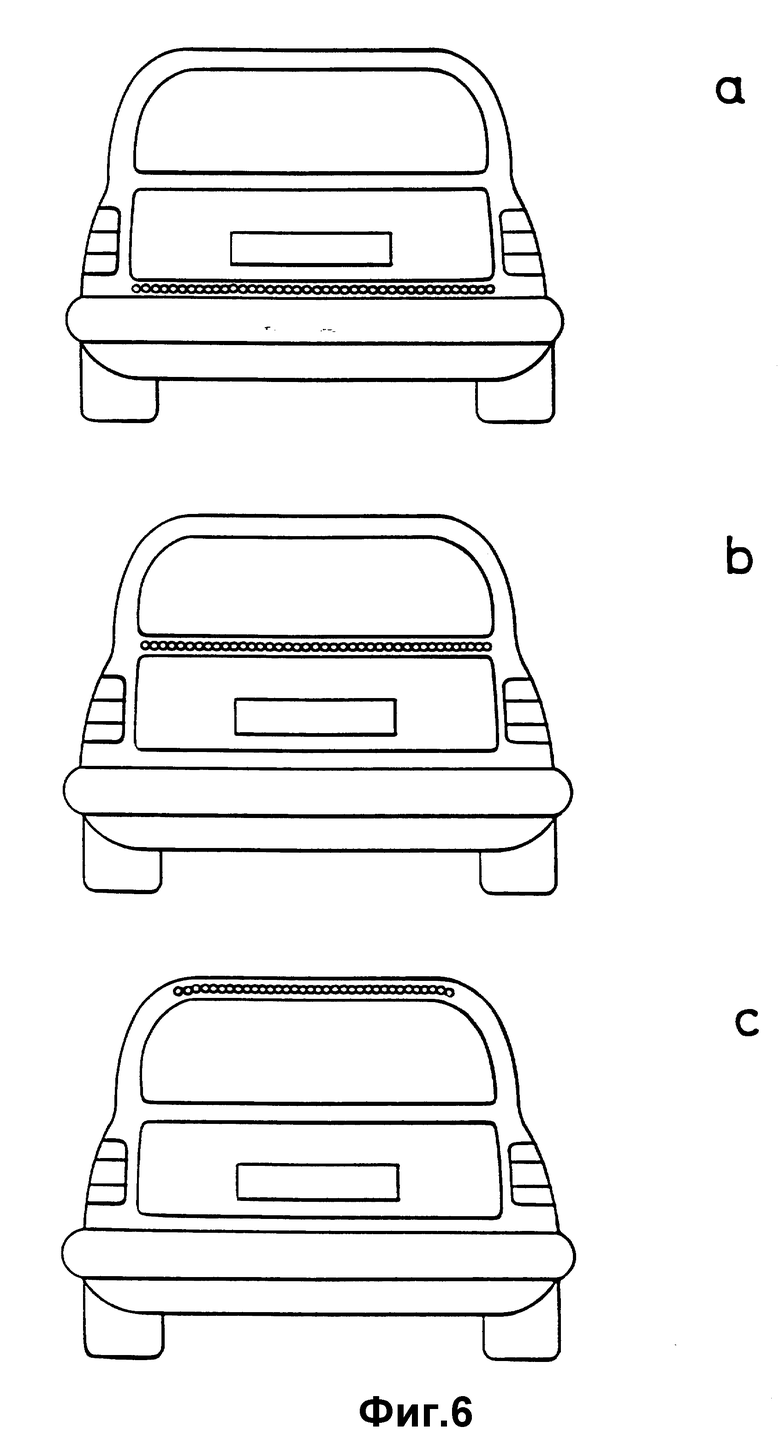
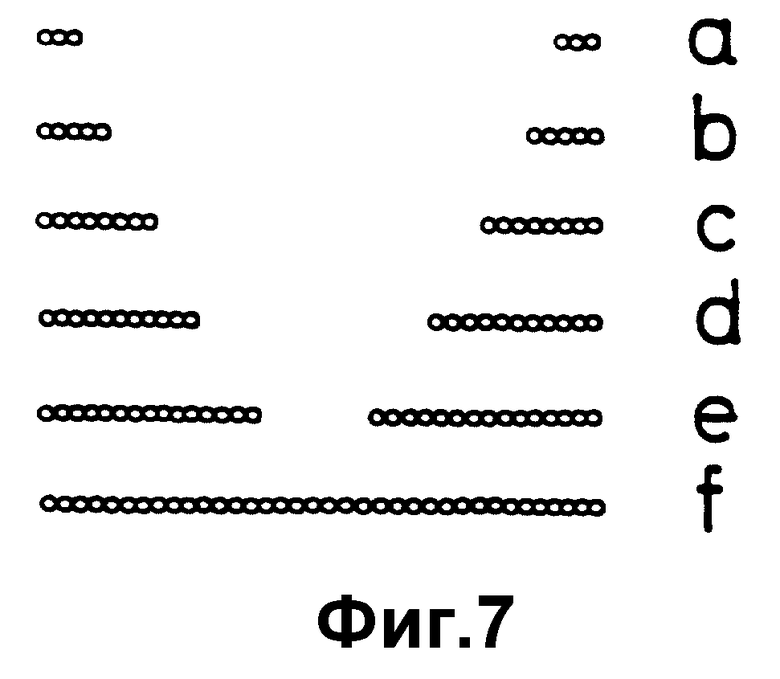
Эта задача согласно изобретению решается тем, что предупредительные сигналы не встроены как можно красивее по форме в оба задних фонаря, как это принято сегодня, а выполнены в виде двух отдельно расположенных световых планок или одной длинной световой планки. В соответствии с предложением увеличить светящуюся поверхность с возрастанием общего значения опасности можно также увеличить длину двух световых планок. Это возможно с небольшими лампами накаливания, а особенно со светодиодами на фиг. 6а, например, между бампером и нижним краем крышки багажника, на фиг. 6b на нижнем краю заднего стекла или на фиг. 6с на его верхнем краю. При низких общих значениях опасности мигают только наружные части планок. При возрастании значений они удлиняются в направлении середины автомобиля, а при высоких или максимальных значениях выстраиваются в одну линию в середине автомобиля, как это изображено на фиг. 7a - 7f. Благодаря пространственному отделению от остальных фонарей и форме планок опасность спутать их с указателями поворота тем меньше, чем выше общее значение опасности и чем длиннее поэтому мигающие части обеих планок. Планки имеют к тому же то преимущество, что интенсивность предупреждения бросается в глаза и что они, особенно в состоянии высокой интенсивности, оптически и физиологически действуют как ограждающие барьеры.
Примеры осуществления изобретения поясняются в описании с помощью прилагаемых фигур.
На фиг. 1 показана характеристика мигания с длинными фазами свечения и короткими постоянными паузами, а также с возрастающей частотой;
на фиг. 2 - характеристика мигания с короткими постоянными фазами свечения и длинными варьируемыми паузами, а также с возрастающей частотой;
на фиг. 3 - характеристика мигания с одинаково длинными фазами свечения и паузами, а также с возрастающей частотой;
на фиг. 4 - последовательная по времени комбинация характеристик по фиг. 1 и 3;
на фиг. 5 - другая характеристика в форме другой комбинации;
на фиг. 6a - расположение множества сигналов замедления в виде световой планки между бампером и крышкой багажника;
на фиг. 6b - световая планка на нижнем краю заднего стекла;
на фиг. 6c - световая планка над задним стеклом;
на фиг. 7a - 7f - мигающие части двух световых планок при небольшой интенсивности предупреждения (фиг. 7a) в несколько ступеней до высокой интенсивности предупреждения (фиг. 7f).
Изобретение относится к автомобильной сигнализации, в частности, касается замедления автомобилей и обеспечивает уменьшение опасности наездов в дорожном движении. Отличительной особенностью способа является то, что в данном случае интенсивность предупредительного сигнала о замедлении автомобиля изменяют в зависимости от величины опасности, которая исходит от этого автомобиля и может стать действенной для движущихся сзади автомобилей. При этом предупредительный сигнал замедления зажигают прерывисто. 29 з.п. ф-лы, 1 табл., 7 ил.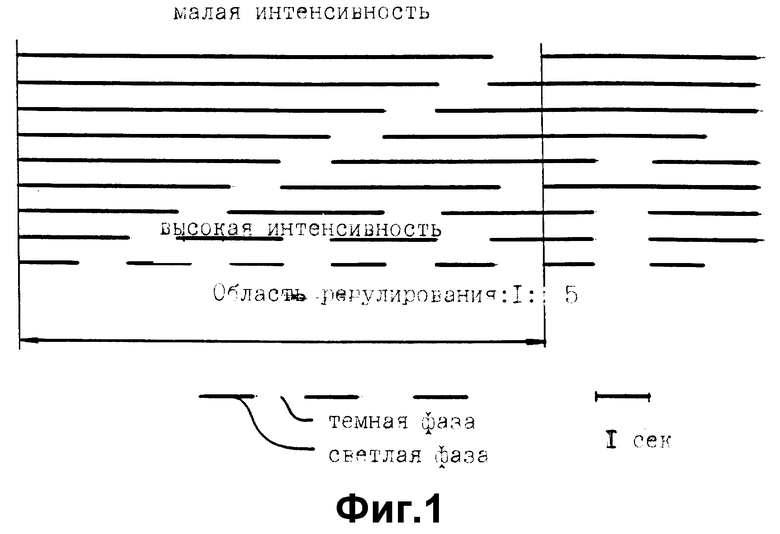
2. Способ по п.1, отличающийся тем, что предупредительный сигнал замедления зажигают прерывисто.
6. Способ по п.5, отличающийся тем, что при определении уровня совокупной величины опасности наезда ΣG замедление b, и/или отрезок времени t, и/или путь S с замедлением учитывают, соответственно увеличивая и/или уменьшая, например возводя в степень и/или извлекая корень, как
7. Способ по любому из пп.1 - 6, отличающийся тем, что уровень совокупной величины опасности наезда ΣG определяют с принятием во внимание величины скорости движения перед замедлением, например
8. Способ по любому из пп.1 - 7, отличающийся тем, что в период срабатывания антиблокировочной системы величину ΣG дополнительно повышают.
11. Способ по любому из пп.1 - 10, отличающийся тем, что уровень совокупной величины опасности наезда ΣG уменьшают и актуализируют путем интегрирования отрицательных частиц величин опасности ΔG.
12. Способ по любому из пп.1 - 11, отличающийся тем, что в память вводят только положительные уровни совокупной величины опасности наезда ΣG.
13. Способ по любому из пп.1 - 12, отличающийся тем, что стирание введенного в память уровня совокупной величины опасности наезда ΣG производят с течением времени.
15. Способ по любому из пп.1 - 14, отличающийся тем, что стирание введенного в память уровня совокупной величины опасности наезда ΣG прерывают при определенном имеющемся в памяти остаточном значении опасности ΣG .
16. Способ по любому из пп.1 - 15, отличающийся тем, что стирание введенного в память уровня совокупной величины опасности наезда ΣG прерывают при остаточном значении опасности ΣG, зависящем от скорости или среднего тормозного давления при срабатывании антиблокировочной системы.
19. Способ по любому из пп.1 - 18, отличающийся тем, что предупредительный сигнал замедления зажигают только при превышении зависящего от скорости предельного уровня имеющейся в памяти совокупной величины опасности наезда ΣG.
20. Способ по любому из пп.1 - 19, отличающийся тем, что предупредительный сигнал замедления зажигают при уменьшении зафиксированного обратно направленным дистанционным радаром расстояния до движущегося сзади автомобиля ниже определенного минимального расстояния.
22. Способ по любому из пп.1 - 21, отличающийся тем, что предупредительный сигнал замедления составляют из одинаковых коротких светлых фаз и неодинаковых длинных темных фаз, которые сокращают непрерывно или ступенями при повышении уровня совокупной величины опасности наезда ΣG.
23. Способ по любому из пп.1 - 22, отличающийся тем, что предупредительный сигнал замедления составляют из одинаковых по длительности светлых и темных фаз, которые сокращают синхронно непрерывно или ступенями при повышении уровня совокупной величины опасности наезда ΣG.
24. Способ по любому из пп.1 - 23, отличающийся тем, что характеристики светлых и темных фаз предупредительного сигнала замедления составляют из одновременной комбинации характеристик по пп.21 и 23 или 22 и 23.
28. Способ по любому из пп.1 - 27, отличающийся тем, что число загорающихся элементов в предупредительном сигнале замедления или их эффективную поверхность увеличивают с повышением уровня совокупной величины опасности наезда ΣG.
29. Способ по любому из пп.1 - 28, отличающийся тем, что для предупредительного сигнала замедления используют световые планки, светящуюся длину которых увеличивают с повышением уровня совокупной величины опасности наезда ΣG.
30. Способ по любому из пп.1 - 29, отличающийся тем, что яркость предупредительного сигнала замедления устанавливают зависящей от окружающей освещенности.
| DE 3033546 A1, 27.08.81 | |||
| АЗА-КОЛЬЦЕВОЕ СОЕДИНЕНИЕ С ВНУТРЕННИМ МОСТИКОМ | 2008 |
|
RU2441868C2 |
| SU 3711828 A1, 16.01.73. | |||
