Изобретение относится к способу выполнения процесса аварийного торможения транспортного средства согласно ограничительной части пункта 1 формулы изобретения.
Системы аварийного торможения в транспортных средствах являются общеизвестными, причем в общем случае проводится различие между системами предотвращения аварий и системами уменьшения последствий аварий. Системы предотвращения аварий своевременно распознают ситуации опасности и предотвращают при идеальных условиях дорожно-транспортное происшествие, сопровождающееся наездом. Системы уменьшения последствий аварий также распознают ситуации опасности, вводят экстренное (аварийное) торможение, но лишь позже. Таким способом только часть энергии столкновения удаляется от транспортного средства.
Обычным образом в начале процесса аварийного торможения при определении условия предупреждения выдается предупреждение водителю, чтобы привлечь внимание водителя к грозящей опасности. Условие предупреждения может определяться, например, из скорости и замедления тормозящего транспортного средства, а также расстояния до впереди движущегося транспортного средства, его скорости и ускорения. И после предупреждения водителя системой аварийного торможения самостоятельно определяются или запрашиваются определенные замедления.
В DE 10258617 B4 описан такой способ для инициирования самостоятельного процесса аварийного торможения, чтобы избегать наезда транспортного средства на впереди движущееся транспортное средство или уменьшать последствия наезда. В этом способе выдается предупреждение водителю, если выполняется по меньшей мере одно заданное условие предупреждения. С учетом определенного ускорения транспортного средства и/или определенного относительного ускорения между транспортным средством и впереди движущимся транспортным средством, при выполненном условии предупреждения самостоятельно инициируется процесс аварийного торможения для предотвращения аварии или для уменьшения последствий аварии.
Из DE 10237714 A1 известен способ для автоматического ввода процесса аварийного торможения с предшествующим предупредительным торможением в транспортных средствах, причем при предупредительном торможении определяют достигаемое замедление транспортного средства и момент ввода аварийного торможения варьируют в зависимости от этого определенного замедления транспортного средства.
Из DE 102005054754 A1 известен способ для определения момента времени для ввода необходимого тормозного вмешательства для транспортного средства. Ожидаемое тормозное замедление определяют таким образом, что при наличии фактически определенного коэффициента трения задают уменьшенное в зависимости от этого коэффициента трения по сравнению с определенным максимальным замедлением тормозное замедление, в то время как в случае отсутствия фактически определенного коэффициента трения задают тормозное замедление, увеличенное относительно вначале заданного уменьшенного тормозного замедления.
Из EP 2036791 A1 известно замедляющее/контролирующее устройство для транспортного средства, в котором устройство предупредительного торможения при регистрации определенного значения замедления остается деактивированным даже тогда, когда само по себе должно инициироваться предупредительное торможение.
Задача изобретения состоит в том, чтобы дополнительно усовершенствовать способ выполнения процесса аварийного торможения транспортного средства, в особенности, в отношении того, что процесс аварийного торможения технически просто согласуется с текущей ситуацией движения или ситуацией окружения транспортного средства.
Эта задача решается признаками пункта 1 формулы изобретения. Предпочтительные варианты осуществления являются предметом зависимых пунктов формулы изобретения.
Согласно пункту 1 формулы изобретения, предусмотрен способ выполнения процесса аварийного торможения транспортного средства, в частности, транспортного средства промышленного назначения для предотвращения аварии и/или уменьшения последствий аварии, причем при определении и/или наличии по меньшей мере одного заданного условия предупреждения инициируется процесс аварийного торможения. При инициировании процесса аварийного торможения выдается предупреждение водителю и одновременно или с задержкой по времени относительно этого задается и/или управляется заданное замедление аварийного торможения транспортного средства на основе определенного перед и/или во время процесса аварийного торможения и относящегося к процессу аварийного торможения параметра влияния.
В соответствии с изобретением при достижении или выполнении заданного каскадного условия, то есть при превышении заданного порогового значения относящегося к процессу аварийного торможения параметра влияния, задаются по меньшей мере две фазы замедления аварийного торможения с различным замедлением аварийного торможения. Предпочтительным образом можно тем самым достичь так называемого каскада торможения или предупреждения, причем замедление аварийного торможения, или замедление, или значение замедления аварийного торможения, или значение замедления фаз замедления аварийного торможения, или фаз замедления, или длительность фаз замедления определяется, соответственно, определяются посредством относящегося к процессу аварийного торможения параметра влияния. Таким образом, процесс аварийного торможения, в аспекте технического управления, может просто согласовываться с параметром влияния или изменением этого параметра влияния, например, таким образом, что значение замедления первой во времени фазы замедления меньше, чем значение замедления по меньшей мере одной следующей по времени фазы замедления, в частности, значение замедления последней по времени фазы замедления соответствует максимальному значению замедления. Таким образом, оптимально согласованный с текущей ситуацией транспортного средства или окружения процесс аварийного торможения может задаваться простым способом, а также, при необходимости, адаптироваться. Тем самым, при соответствующем изобретению процессе аварийного торможения как водитель транспортного средства, так и само транспортное средство оптимальным образом подготавливается к соответственно преобладающей в текущий момент или, при определенных условиях, наступающей аварийной ситуации.
Так, например, согласно одному конкретному выполнению способа, при достаточно высоком и, тем самым, выполняющем каскадное условие или достигающем высокое значение коэффициенте сцепления (шины с дорогой) в качестве примерного параметра влияния сначала вводится незначительное замедление, прежде чем потом, при примерно остающемся равным коэффициенте сцепления, к заданному моменту времени задается более высокое по сравнению с этим замедление, что осуществляется, например, скачком. С другой стороны, возможно также, если, например, во время процесса аварийного торможения определяется измененный в такой степени коэффициент сцепления, что возникает острое усиление ситуации опасности, то замедление сразу же, например, скачком повышается. Таким образом, возможно ступенчатое притормаживание транспортного средства. Водитель транспортного средства может, таким образом, оптимально подготавливаться к грозящей аварийной ситуации и соответственно реагировать.
Кроме того, при выполнении или достижении заданного условия максимального значения, например, при спадании ниже заданного порогового значения, относящегося к процессу аварийного торможения параметра влияния, задается максимально имеющееся (т.е. находящееся в распоряжении) замедление торможения. Тем самым достигается то, что при особенно острой опасности аварии немедленно задается максимально имеющееся замедление аварийного торможения. Конкретно, выполнение способа может осуществляться таким образом, что при превышении заданного порогового значения параметра влияния задается ступенчатое замедление аварийного торможения, в то время как при спадании ниже этого порогового значения задается максимально имеющееся замедление аварийного торможения. Понятия «превышение» или «спадание ниже» в связи с пороговыми значениями здесь должны толковаться в широком смысле и должны служить только отграничению различных ситуаций замедления аварийного торможения. Так эти понятия могут, в зависимости от типа порогового значения, также находить применение и в обратном смысле.
Особенно предпочтительно параметры влияния, имеющие отношение к процессу аварийного торможения, могут определяться повторно во время процесса аварийного торможения, и замедление аварийного торможения согласуется с изменениями параметра влияния и, тем самым, адаптируется. Тем самым обеспечивается возможность динамического согласования процесса аварийного торможения с изменением ситуации транспортного средства и окружения.
В одном конкретном выполнении предупреждение водителя может восприниматься водителем оптически и/или акустически и/или гаптически. В случае гаптически воспринимаемого предупреждения водителя предупреждение водителя можно осуществлять в форме процесса частичного торможения как рывок при торможении. Как раз процесс частичного торможения как рывок при торможении представляет собой быстро воспринимаемое, а также технически просто реализуемое предупреждение водителя. Особенно предпочтительным в смысле полезной интеграции функций в этой связи является выполнение, при котором параметр влияния, связанный с процессом аварийного торможения, выдается или выводится компонентом, который выполняет процесс частичного торможения.
В одной конкретной форме выполнения процесс частичного торможения может быть реализован путем приведения в действие рабочей тормозной системы (также называемой ЕСЕ), в частности, таким образом, что рабочая тормозная система кратковременно замедляется. В качестве альтернативы или дополнительно, процесс частичного торможения может быть реализован аналогично также путем приведения в действие тормозной системы для длительного торможения в качестве неизнашиваемой тормозной установки, в частности, таким образом, что тормозная система для длительного торможения кратковременно замедляется.
Параметр влияния, относящийся к процессу аварийного торможения, может в принципе быть образован любым подходящим значением или параметром, который может определяться на транспортном средстве и/или измеряться. Особенно предпочтительным образом параметр влияния, относящийся к процессу аварийного торможения, образуется коэффициентом сцепления (шины с дорогой). Коэффициент сцепления, в числе прочего, зависит от погодных условий, качества поверхности дорожного полотна, а также состояния шин. Тем самым, путем учета коэффициента сцепления при управлении или задании замедления аварийного торможения процесс аварийного торможения может оптимизироваться и согласовываться с условиями движения или условиями окружения. При меньшем значении коэффициента сцепления максимальное возможное замедление является меньшим. Путем определения коэффициента сцепления во время продолжительности предупреждения водителя процесс аварийного торможения может, таким образом, оптимально согласовываться с имеющимся максимальным возможным замедлением.
В конкретном выполнении коэффициент сцепления определяется вычислениями на основе определенных сенсорами параметров, в частности, посредством и без того уже встроенных в транспортное средство систем. Предпочтительным образом коэффициент сцепления может определяться посредством электронной системы торможения. Таким образом, выполненный как рывок при торможении процесс частичного торможения может служить, с одной стороны, в качестве предупреждения водителя, а с другой стороны, использоваться для определения коэффициента сцепления. Посредством этой предпочтительной двойной функции выполненного как рывок при торможении процесса частичного торможения процесс аварийного торможения может технически просто согласовываться с актуальным окружением транспортного средства, таким как, например, погодные условия, качество поверхности дорожного полотна или шины.
В качестве альтернативы этому параметр влияния может, в принципе, также быть значением, определенным на основе характеристики сила-проскальзывание, например, значением, определенным посредством противобуксовочного регулирования, в качестве лишь одного возможного примера.
Далее описан пример выполнения со ссылками на чертежи, на которых показано следующее:
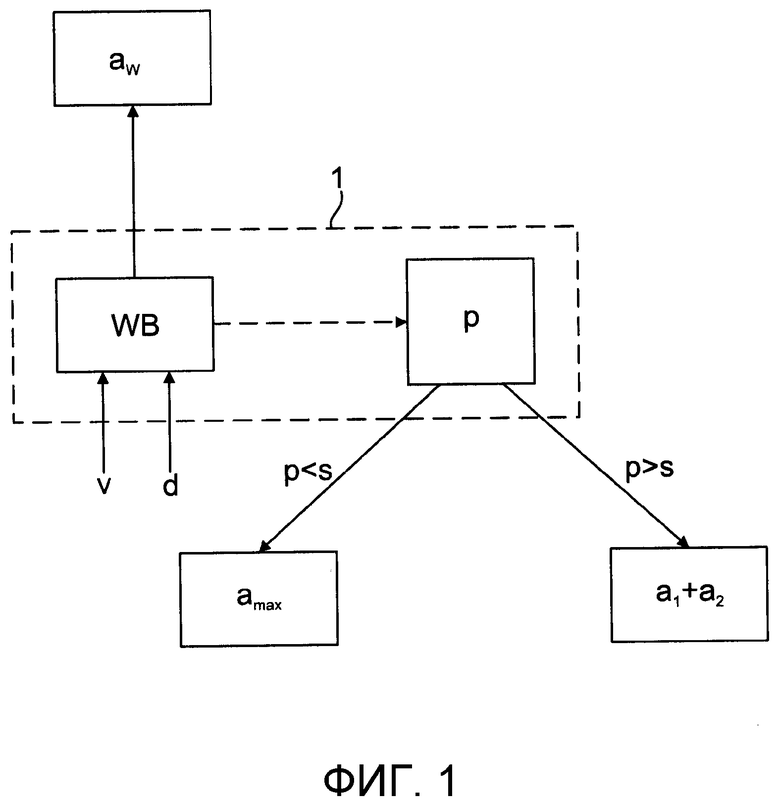
фиг.1 - блок-схема процесса выполнения соответствующего изобретению способа осуществления процесса аварийного торможения, и
фиг.2 - диаграмма зависимости замедления от времени процесса замедления аварийного торможения как функции времени.
На фиг.1 показано принципиальное осуществление способа выполнения процесса аварийного торможения. Как показано на фиг.1, при наличии условия WB предупреждения, показанное здесь штриховой линией устройство 1 управления и/или регулирования транспортного средства выдает предупреждение a w водителя. Наличие условия WB предупреждения может определяться устройством 1 управления и/или регулирования, например, из скорости v и ускорения транспортного средства, выполняющего аварийное торможение, а также расстояния d до впереди движущегося транспортного средства, скорость и ускорение которого определяются (для примера показано стрелками). Предупреждение a w водителя осуществляется через осязательно (гаптически) воспринимаемый процесс частичного торможения, также называемый рывком при торможении. Рывок a w при торможении может, например, быть реализован посредством кратковременного замедления рабочей, соответственно, фрикционной тормозной системы и/или тормозной системы для длительного торможения.
Как далее следует из фиг.1, например, в течение длительности рывка a w при торможении (показано штриховой стрелкой) устройство 1 управления и/или регулирования определяет относящийся к процессу аварийного торможения параметр p влияния, или, например, в случае определенного перед вводом процесса аварийного торможения параметра влияния адаптирует его, при необходимости. В случае параметра p влияния речь идет предпочтительно о коэффициенте сцепления (шины с дорогой), который определяется электронной системой торможения на основе проскальзывания колеса. Если коэффициент p сцепления меньше, чем предварительно определенное пороговое значение s, то система аварийного торможения немедленно выдает максимально возможное замедление a max. Если коэффициент p сцепления, напротив, больше, чем предварительно определенное пороговое значение s, то системой аварийного торможения выдается первое замедление a 1 аварийного торможения, за которым следует второе, предпочтительно максимальное замедление a 2 аварийного торможения.
На фиг.2 показан процесс замедления в течение процесса аварийного торможения как функция времени. Как видно из фиг.2, сначала осуществляется кратковременное незначительное замедление, в случае которого речь идет о предупреждении водителя в виде рывка a w при торможении. Как уже описано выше, во время рывка a w при торможении определяется коэффициент p сцепления. Для случая, когда он был определен по времени перед вводом процесса аварийного торможения, коэффициент сцепления может, при необходимости, адаптироваться. Если коэффициент p сцепления меньше, чем пороговое значение s, то непосредственно после рывка a w при торможении выдается максимально возможное замедление a max аварийного торможения (см. штриховую линию). Если, однако, определенное значение p коэффициента сцепления больше, чем пороговое значение s, то на первой фазе замедления аварийного торможения задается замедление a 1 аварийного торможения, за которым следует вторая фаза аварийного торможения с замедлением a 2 аварийного торможения.
Согласно фиг.2, замедление a 1 аварийного торможения первой фазы замедления аварийного торможения меньше, чем замедление a 2 аварийного торможения второй фазы замедления аварийного торможения. Тем самым получается ступенчатый процесс замедления а аварийного торможения (см. сплошную линию). Первая фаза замедления аварийного торможения может, например,. служить в качестве дополнительного предупреждения для водителя транспортного средства, выполняющего аварийное торможение, или для водителей последующих транспортных средств.
Изобретения относятся к области автомобилестроения, в частности к тормозным системам. Способ выполнения процесса аварийного торможения, заключающийся в инициации процесса аварийного торможения. При инициировании процесса аварийного торможения выдают предупреждение водителя и одновременно или с задержкой по времени относительно этого задают и/или управляют заданным замедлением аварийного торможения транспортного средства на основе определенного по времени перед и/или во время процесса аварийного торможения и относящегося к процессу аварийного торможения параметра влияния. Затем при превышении заданного порогового значения относящегося к процессу аварийного торможения параметра влияния задают две фазы замедления аварийного торможения с различными значениями замедления аварийного торможения, причем значение замедления фаз замедления и/или длительность фаз замедления определяют посредством относящегося к процессу аварийного торможения параметра влияния. Достигается усовершенствование процесса аварийного торможения транспортного средства. 14 з.п. ф-лы, 2 ил.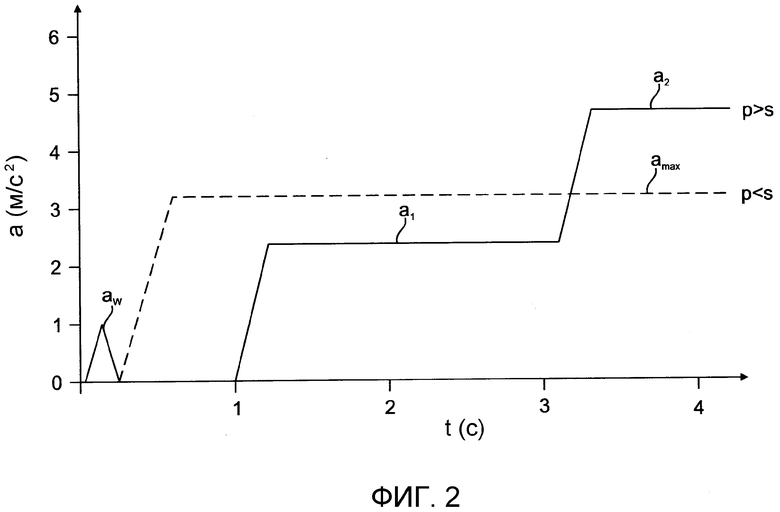
1. Способ выполнения процесса аварийного торможения транспортного средства, в частности транспортного средства промышленного назначения для предотвращения аварии и/или уменьшения последствий аварии, причем при определении и/или наличии по меньшей мере одного заданного условия (WB) предупреждения инициируют процесс аварийного торможения, причем при инициировании процесса аварийного торможения выдают предупреждение (aw) водителя и одновременно или с задержкой по времени относительно этого задают и/или управляют заданным замедлением аварийного торможения транспортного средства на основе определенного по времени перед и/или во время процесса аварийного торможения и относящегося к процессу аварийного торможения параметра (p) влияния, отличающийся тем, что при превышении заданного порогового значения (s), относящегося к процессу аварийного торможения параметра (p) влияния, задают по меньшей мере две фазы замедления аварийного торможения с различными значениями (a1, a2) замедления аварийного торможения, причем значение (а1, а2) замедления фаз замедления и/или длительность фаз замедления определяют посредством относящегося к процессу аварийного торможения параметра (p) влияния.
2. Способ по п.1, отличающийся тем, что значение замедления первой во времени фазы (а1) замедления меньше, чем значение замедления по меньшей мере одной следующей по времени фазы (а2) замедления, в частности, значение замедления последней по времени фазы (а2) замедления соответствует максимальному значению замедления.
3. Способ по п.1, отличающийся тем, что при достижении заданного условия максимального значения, в частности, при спадании ниже заданного порогового значения (s), относящегося к процессу аварийного торможения параметра (p) влияния, задается максимально реализуемое замедление (amax) аварийного торможения.
4. Способ по п.2, отличающийся тем, что при достижении заданного условия максимального значения, в частности, при спадании ниже заданного порогового значения (s), относящегося к процессу аварийного торможения параметра (p) влияния, задается максимально реализуемое замедление (amax) аварийного торможения.
5. Способ по п.1, отличающийся тем, что параметр (p) влияния, имеющий отношение к процессу аварийного торможения, определяется повторно во время процесса аварийного торможения, и замедление (а) аварийного торможения согласуется с изменениями параметра (p) влияния.
6. Способ по п.2, отличающийся тем, что параметр (p) влияния, имеющий отношение к процессу аварийного торможения, определяется повторно во время процесса аварийного торможения, и замедление (а) аварийного торможения согласуется с изменениями параметра (p) влияния.
7. Способ по п.3, отличающийся тем, что параметр (p) влияния, имеющий отношение к процессу аварийного торможения, определяется повторно во время процесса аварийного торможения, и замедление (а) аварийного торможения согласуется с изменениями параметра (p) влияния.
8. Способ по п.4, отличающийся тем, что параметр (p) влияния, имеющий отношение к процессу аварийного торможения, определяется повторно во время процесса аварийного торможения, и замедление (а) аварийного торможения согласуется с изменениями параметра (p) влияния.
9. Способ по п.1, отличающийся тем, что предупреждение (aw) водителя может восприниматься водителем оптически, и/или акустически, и/или гаптически.
10. Способ по п.9, отличающийся тем, что гаптически воспринимаемое предупреждение (aw) водителя осуществляется в форме процесса частичного торможения как рывок при торможении.
11. Способ по п.10, отличающийся тем, что процесс (aw) частичного торможения реализуется путем приведения в действие рабочей, соответственно фрикционной тормозной системы или путем приведения в действие тормозной системы для длительного торможения.
12. Способ по п.10, отличающийся тем, что параметр (p) влияния, относящийся к процессу аварийного торможения, выдается или выводится компонентом, выполняющим процесс частичного торможения.
13. Способ по любому из пп.1-12, отличающийся тем, что параметр (p) влияния, относящийся к процессу аварийного торможения, включает в себя коэффициент сцепления или является значением, определяемым на основе характеристики сила-проскальзывание.
14. Способ по п.13, отличающийся тем, что коэффициент (p) сцепления определяется вычислениями на основе определенных сенсорами параметров.
15. Способ по п.14, отличающийся тем, что коэффициент (p) сцепления определяется посредством электронной системы торможения или что коэффициент (p) сцепления определяется на основе проскальзывания колеса, в частности, посредством противобуксовочного регулирования.
| DE 10237714 A1, 26.02.2004 | |||
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ С ПУСТОТАМИ | 1992 |
|
RU2036791C1 |
| DE 19926744 A1, 23.12.1999 | |||
| DE 102005054754 A1, 24.05.2007 | |||
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |

