1
Изобретение отн(х;ится к подъемнотранспортному оборудованию.
Наиболее близким техническим решением к изобретению является устрсЛст во для управления приводами механизмов стрелового крана, содеркашее задатчик скорости привода механизма изменения угла наклона стрелы, первый выход которого связан с первым входом основной схемы прморитета, выход которой подклк - .j чен к входу привода механизма изменения угла наклона стрелы, датчик опрокидывающего момента крана, выход которого подсоединен к входу схемы зона «нечувствительности, первый выход кото- 5 рой соединен со вторым входом основной схемы приоритета, и датчик угла наклона стрелы .
Недостатком известного устройств является, низкая надежность, обусловлен- го рая большими хинамическими нагрузками.
Цель изобретения - повышение надежности крана за счет снижения его динамических нагрузок.
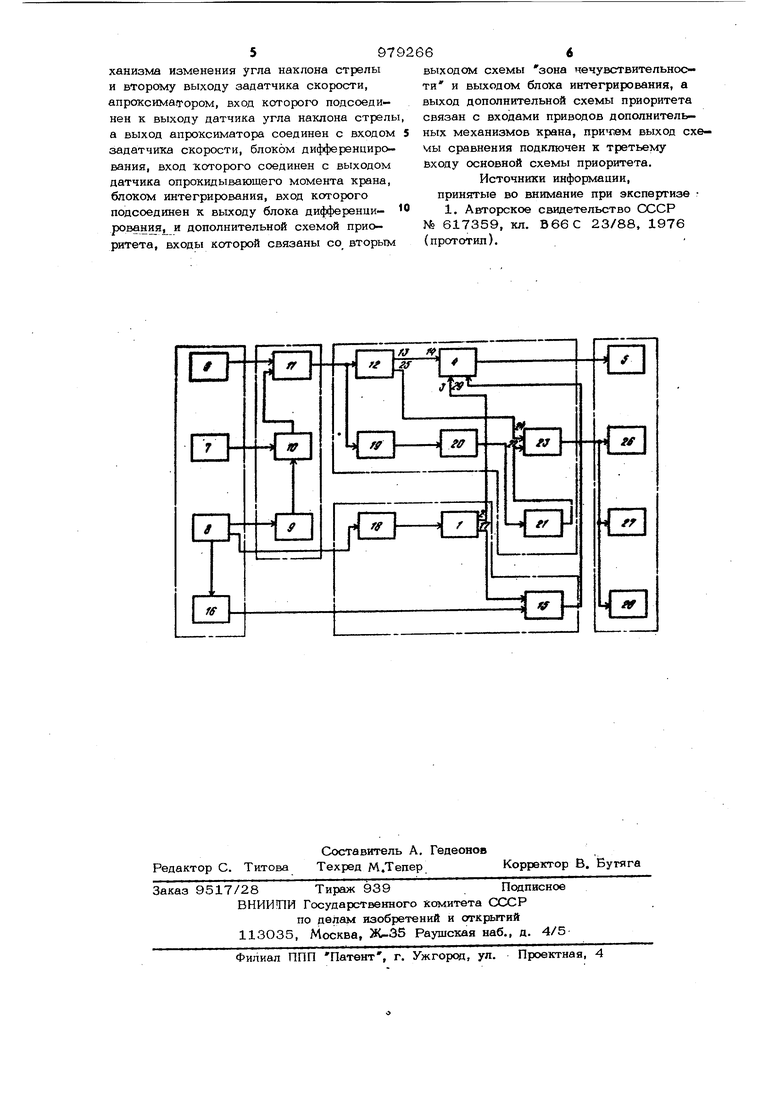
Цель достигается тем, что устройство снабжено датчиком скорости механизма изменения угла наклона стрелы, схемой сравнения, входы которой подключены к выходу датчика скорости механизма изменения угла наклона стрелы и второму выходу задатчика скорости, апроксимато- ром, вход которого подсоединен к выходу датчика угла наклона-стрелы, а выход апроксиматора соединен с входом задат- чика скорости, блоком диф(|)еренцирова- ния, вход которого соединен с выходом датчика опрюкидывающего момента крана, блоком интегрирования, вход которого подсоединен к выходу блока ди(})ференцирования, и дополнительной схемой приоритета, входы которой связаны со вторьп выходом схемы зона нечувствительнсюти и выходом блока интегрирования, а выход дополнительной схемы приоритета связан с входами. приводов дополнительных механизмов крана, причем выход схемы сравнения подключен к третьему входу основной схемы приоритета. На чертеже изображена схема устройства для управления приводами механизмов стрелового крана. Устройство для управления приводами механизмов стрелового крана содержит задатчик 1 скорости привода механизма изменения угла наклона стрелы, первый выход 2 которого связан с первым входом 3 основной схемы 4 приоритета, выход которой подключен к входу привода 5 механизма изменения угла наклона стрелы. Датчигк опрокидывающего момен та крана содержит силоизмеритель 6 веса груза, силоизмеритель 7 усилия в толкателе стрелы и датчик 8 угла наклонастрелы. Датчик 8 через апроксиматор 9подключен к одному входу умножителя Ю, к другому входу которого подключен силоизмеритель 7, а выход умножителя 10вместе с выходом силоизмерителя 6 подключен к cyiviMaTopy 11, сигнал на выходе которого пропорционален опрокидывающему моменту крана. Выход сумма тора 11 подсоединен к входу схемы 12 зона нечувствительности, первый выход 13 которой соединен со вторым входом 14 схемы 4. Входы схемы 15 сравнени подключены к выходу датчика 16 скорости механизма изменения угла наклона стрелы и второму выходу 17 задатчика 1. Выход датчика 8 через ашрокс1пу1атор 18 подключен к входу задатчика 1. Выход суммаЕОра 11 через блок 19 дифференцирования, блок 20 интегрирования и корректор 21 подсоединен к одному входу 22 дополнительной схемы 23 Приоритета, другой вход 24 которой подключен к выходу 25 схемы 12. Выход схемы 23 связан с входами приводов , дополнительных механизмов крана: приводом 26 Грузовой лебедки, приводом 27маневрирования гуська и приводом 28телескопирования стрелы. Выход схемы 15 подключен к третьему входу 29 схемы 4. Устройство для управления приводами механизмов стрелового крана работает следующим образом. По команде оператора сигнал задатчика 1 скорости привода 5 механизма изменения утла наклона стрелы поступает на вход 3 схемы 4 приоритета и воздействует на привод 5. Датчик 8 угла чере апроксиматор 18 воздейсгвует на аадагчик 1, поэтому CHrHaji на выходе задат- чйка 1 зависит также от сигнала датчика 8. Скорость привода 5 поддерживается на заданном уровне с помощью схемы 15 сравнения, воздействующей на вход 29 схемы 4 приоритета и связанной с задатчиком 1 и датчиком 16 скорости. В случае, например, чрезмерного повышения опроквдывающего момента, появляется сигнал на выходе 13 схемы 12 зона нечувствительности, при этом сигнал на входе 14 схемы 4 приоритета воздействует на привод 5 так, что скорость механизма уменьщается вплоть до полной остановки, что препятствует перегрузке крана. При работе приводов 26, 27 и 28 схема 23 приоритета может также изменить их скорость, что происходит в случае появления сигнала на выходе 25 схемы 12 при перегрузке крана или в случае колебаний стрелы с грузом, когда сигнал на выходе сумматора имеет переменную составляющую, выделяемую и преобразуемую блоками 19, 20 и корректором 21 и поступающую на схемы 23, в последнем случае происхо- дит демпфирование колебаний стрелы с грузом. Таким образом, устройство для управления приводами механизмов стрелового крана при перегрузке крана при работе хотя бы одного его привода позволяет уменьшить скорость привода вплоть до его полной остановки, а при колебаниях стрелы с грузом позволяет осуществить демпфирование колебаний, что повыщает надежность работы крана, снижает динамические нагрузки и позволяет повысить производительность крана. Формула изобретения Устройство для управления приводами механизмов стрелового крана, содержащее задатчик скорости привода механизма изменения угла наклона стрелы, первый выход которого связан с первым входом основной схемы приоритета, выход кото рой подключен к входу привода механизма изменения угла наклона стрелы, датчик опрокидывающего момента крана, выход которюго подсоединен к входу схемы зона нечувствительности, первый выход которой соединен со вторым входом основной схемы приоритета, и датчик угла наклона стрелы, отличающееся тем, что, с целью повыщения надежности крана за счет снижения его динамических нагрузок, оно снабжено датчиком скорости механизма изменения угла наклона стрелы, схемой сравнения, входы которой подключены к выходу датчика скорости ме597ханизма изменения угла наклона стрелы и второму выходу задатчика скорости, апроксимаггором, вход которого подсоединен к выходу датчика угла наклона стрелы а выход апроксиматора соединен с входом задатчика скорости, блоком дифференцирования, вход тсоторого соединен с выходом датчика опрокидывающего момента крана, блоком интегрирования, вход которого подсоединен к выходу блока дифференциpOBaHHHjL и дополнительной схемой приоритета, входы которой связаны со вторым 6 выходом схемы зона нечувствительности и выходом блока интегрирования, а выход дополнительной схемы приоритета связан с входами приводов дополнительных механизмов крана, причгжм выход схе- Vlы сравнения подключен к третьему входу основной схемы приоритета. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 617359, кл. В66С 23/88, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительное устройство стрелового крана | 1982 |
|
SU1101402A1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| Устройство для перевода стрелы крана в транспортное положение | 1990 |
|
SU1791344A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ АВТОКРАНА ОТ ОПРОКИДЫВАНИЯ И ПЕРЕГРУЗОК С УПРАВЛЕНИЕМ СКОРОСТЯМИ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500608C2 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| СТРЕЛОВОЙ КРАН С ПОВОРОТНОЙ ПЛАТФОРМОЙ | 1993 |
|
RU2034773C1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737353A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| Указатель высоты подъема гуська стрелового крана | 1982 |
|
SU1085928A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1975 |
|
SU565007A1 |
