Изобретение относится к горной промышленности и предназначено для подземной разработки угольных месторождений.
Известен способ контроля и управления движения угледобывающих комбайнов по гипсометрии пласта, включающий контрольный цикл прохода комбайна по всей длине очистного забоя с ручным управлением механизмами подъема шнека при визуальном контроле движения по гипсометрии пласта с автоматической записью в электронном блоке фактических команд и повторение этих команд при отработке второго и третьего цикла уже без присутствия человека в очистном забое, т.е. в программном режиме /1/.
Недостатком способа является его неточность и трудоемкость, связанная с тем, что базой отсчета для подъема или опускания шнека является не стационарная система, а став, который уже на втором цикле занимает случайное положение по высоте, т.к. после передвижке на новую дорогу став подштыбовывается с ошибкой того же порядка, что и величина вертикального управления, а на третьем цикле величина подштыбовки может измениться еще больше, причем в положительном или в отрицательном направлениях. Именно поэтому на практике контрольный проход человека необходим не менее одного на три прохода по программе. Это, естественно, приводит к повышению трудоемкости.
Известен способ управления и контроля исполнительным органом горного комбайна в вертикальной плоскости, включающий определение положения границы уголь-порода путем замера физических свойств и условий резания с помощью датчика уголь-порода и передачу полученной информации в электронный блок для выработки управления подъемом или опусканием исполнительного органа /2/.
Недостатком этого способа, являющегося прототипом способа, является низкая надежность и достоверность определения точной границы уголь-порода из-за вероятной нечеткости и размытости границы перехода по данному физическому свойству или по данному параметру резания, которые при визуальном и ручном управлении компенсируются тем, что человек, имея пять органов чувств, пользуется либо оценкой по цвету, либо по крепости, либо по звуку при резании, либо по плотности, а порой ориентируется по имеющимся прослойкам, параллельным почве пласта и друг другу, т.е. пользуется машинально комплексной оценкой.
Известно устройство для контроля движения угледобывающих комбайнов по гипсометрии пласта, включающее шнек комбайна, поворотную рукоять шнека, шарнирно закрепленную на корпусе комбайна, приводной домкрат, поршневая и штоковая полость которого снабжена аналоговыми датчиками давления, электрически связанными с электронным блоком, который регистрирует суммарную реакцию всех работающих резцов шнека при работе по углю или при работе части резцов по углю, а некоторых - по породе - и на этой основе дает сигнал на управление поворотом рукояти шнека (2, 3).
Недостатком этого устройства, являющегося прототипом, является то обстоятельство, что уровнем полезного сигнала является разница реакции забоя породного и угольного на одном-двух резцах, в то время как уровень шума составляет реакцию от нескольких десятков резцов, работающих по углю в различных фазах, что существенно снижает степень распознавания границы уголь-порода.
Целью изобретения является повышение надежности и достоверности определения положения исполнительного органа относительно границы уголь-порода.
Указанная цель достигается тем, что в способе, включающем определение положения границы уголь-порода с помощью датчика уголь-порода и выработку управляющего сигнала, на исполнительный орган положение границы угол-порода определяют путем одновременного замера нескольких различных физических и технологических свойств процесса резания с помощью дополнительных разнотипных датчиков, а управляющий сигнал на исполнительный орган формируют по алгоритму
U = γ1U1+γ2U2+γ3U3+...+γnUn,
где Ui - величина перемещения исполнительного органа, формируемая на выходе датчика i;
γi - коэффициент, учитывающий "вес" датчика i, причем веса датчиков i задаются оператором из условия или Σγi= 1, или автоматически по принципу самообучения ("поощряя увеличением веса для более "удачных" датчиков).
Устройство для осуществления способа, включающее приводной домкрат рукояти шнека, поршневая полость которого служит для опускания шнека в сторону почвы, а штоковая полость - для подъема шнека, датчик уголь-порода, состоящий из измерителя давления в обоих полостях приводного домкрата рукояти и электронный блок обработки, снабжено одной малозубой шарошкой, расположенной на цилиндрической поверхности шнека, с вылетом в сторону забоя, обеспечивающим ударные реакции и импульсы давления в течение части одного оборота шнека, когда шарошка обкатывает очистной забой, с частотой ω, а электронный блок обработки сигнала выполнен с возможностью выделения только этой частоты, расшифровки модуляции по этой частоте, связанной с началом и концом фазы входа и выхода шнека из активной зоны и точки выхода шарошки на породу в почве или на пропластках, с привязкой к фазе шнека и определения положения центра шнека от границ пласта или пропластков.
Малозубая шарошка выполнена в виде свободно посаженного на оси вращения, соосной оси шнека, тела вращения, на цилиндрической поверхности которого выполнены штыри с цилиндрическими хвостовиками и измерительными конусами с твердосплавной вставкой на конце с возможностью свободного вращения вокруг своей оси при работе и свободного демонтажа и замены при затуплении измерительного конуса.
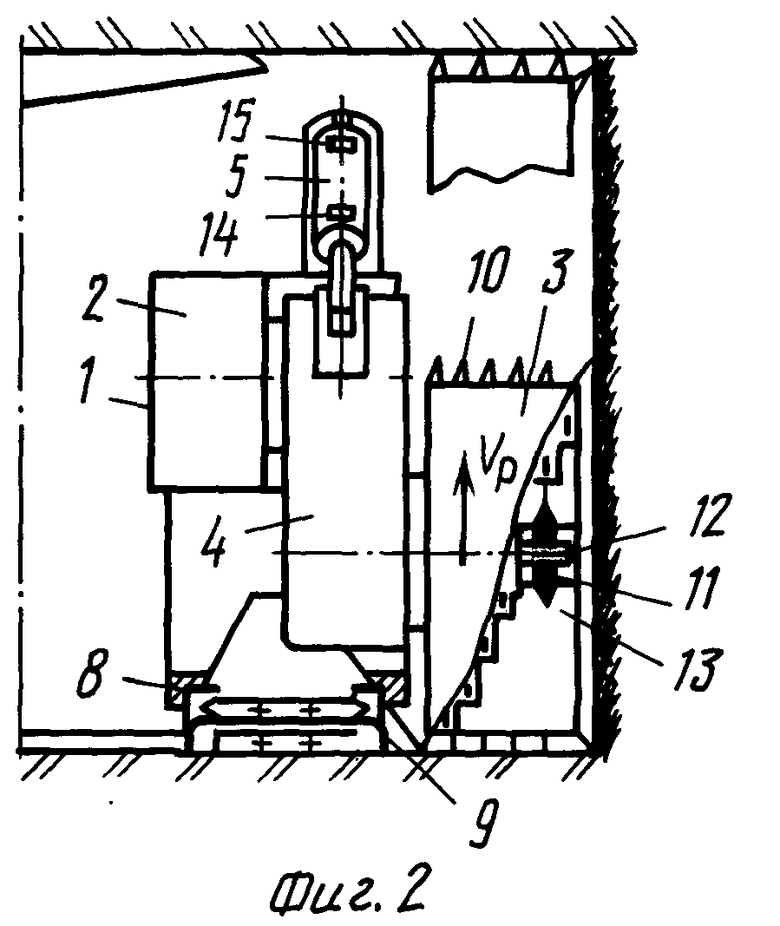
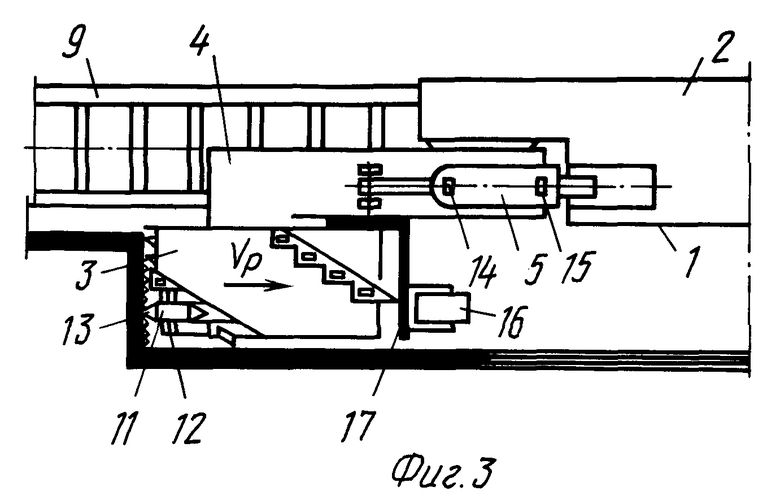
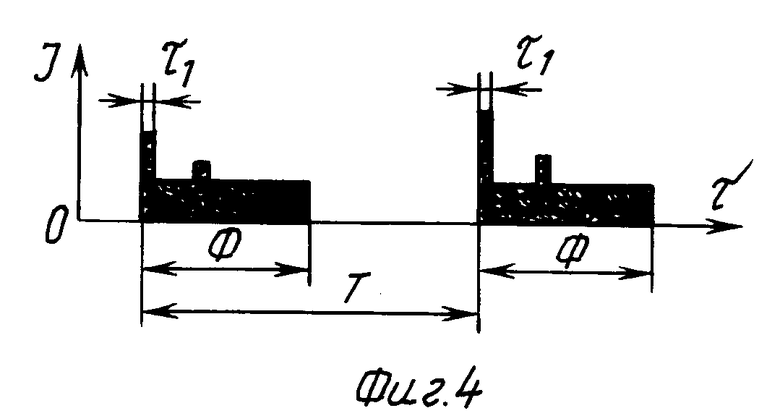
На фиг. 1 представлен общий вид комбайна, вид со стороны забоя, на фиг. 2 - поперечное сечение лавы с комбайном, на фиг. 3 - план, на фиг. 4 - сигнал электронного блока после фильтра.
Автоматизированный комбайн 1 состоит из корпуса 2 с исполнительным органом в виде шнека 3, закрепленного на качалке 4, приводимой в движение приводным домкратом 5, имеющим поршневую полость 6 (например, для опускания шнека) и штоковую полость 7 (например, для подъема шнека). Корпус комбайна с помощью опорных лыж 8 движется по ставу конвейера 9, копируя его положение относительно фактической границы угольного пласта. Шнек 3 комбайна армирован резцами 10, движущимися в направлении по стрелке с окружной скоростью резания V0 = ω0R, где R - радиус обрабатываемой цилиндрической поверхности, а ω0 ,1/сек - угловая скорость. На цилиндрической поверхности шнека закреплен один малозубый инструмент 11, условно называемый далее шарошкой, выполненный в виде свободно посаженного на оси вращения 12, соосной оси шнека 3, тела вращения, на цилиндрической поверхности которого выполнены штыри 13 с цилиндрическими хвостовиками и опорными поверхностями. Шарошка расположена на 10 - 15 мм за габаритами цилиндрической поверхности радиуса R таким образом, что его штыри 13, обкатывая поверхность R, вдавливаются в нее на эту величину Δ мм, осуществляя замер ее крепости наподобие пресса Бринеля вдавливанием в забой мерного конуса, выполненного на конце штыря с заданной конической формы твердосплавной вставкой. Усилие вдавливания воспринимается датчиками 14 и 15, выполненными в виде аналоговых датчиков давления в полостях домкрата 5, электрический сигнал с этих датчиков поступает в электронный блок, расположенный на комбайне или на штреке (на чертеже не показан), где обрабатывается путем выделения информации от датчиков 14 и 15 от ненужной информации, образующейся при работе всех остальных резцов шнека. Для этой цели в электронном блоке предусмотрен частотный фильтр, выделяющий из суммарного электрического сигнала только частоту  1/сек, где t, мм - шаг штырей шарошки.
1/сек, где t, мм - шаг штырей шарошки.
Работает такое устройство таким образом, что сигнал, выделенный на частоте ω, отражает изменение реакции забоя на шарошку, который (сигнал) модулирует эту частоту в функции крепости забоя, причем при движении шарошки по забою сигнал имеется, а при движении шарошки по воздуху (на 50% окружности) - сигнал пропадает. Таким образом отражается во времени фаза Ф поворота шнека внутри цикла T, с (см. фиг. 4), и положение точек с увеличенной крепостью, в почве или на пропластках, с привязкой к положению шнека по фазе и по высоте его центра в вертикальном направлении. По величине τ угла поворота шнека и его отношения к фазе Ф определяется вертикальное смещение центра шнека по отношению к границе уголь-порода U, мм.
Согласно способу, полученная величина команды, равная Ui, сравнивается с данными Ui всех других датчиков, монтируемых на автоматизированном комбайне. Необходимость применения нескольких разнотипных датчиков и их систем, формирующих линейный сигнал управления, определяется возможностью и вероятностью распознавания положения границы уголь-порода даже тогда, когда по данному физическому свойству имеется размытость этой границы и необходимо, как в живой природе, использовать несколько органов чувств.
На фиг. 1 показан один из смонтированных на комбайне 1 датчиков, а именно изотопный датчик 16, смонтированный за погрузочным щитком 17 на почве свежеобработанной полосы за шнеком 3. Этот датчик состоит из корпуса, в котором смонтирован источник излучения, направленный на почву, и датчик рассеянного излучения, отраженного от породы и прошедшего через пачку угля с поглощением сигнала, пропорциональным толщине пачки Ui. Величина Ui является величиной управления для комбайна, соизмеримой с величиной управления Ui всех других типов датчиков, и может быть суммирована по формуле "комплексного" датчика, приведенной выше.
При эксплуатации комплексного датчика периодически проводятся эксплуатационные проверки результатов движения комбайна по гипсометрии пласта. При выявлении отклонений производится сравнение парциальных сигналов Ui с действительной пачкой угля. Наиболее отклоняющиеся парциальные датчики "наказываются" снижением их весов за счет более "удачливых", веса которых в этих случаях соответственно возрастают. Эта система обучения и самообучения в начале выемочного столба создает условия для надежного автоматического управления без присутствия людей в очистном забое при добыче угля.
Соответственно, данная система снимает ограничение в скорости движения комбайна, ограниченная обычно из-за возможности его сопровождения человеком. Все это существенно повышает нагрузку на забой и производительность очистного комплекса.
Источники информации, принятые во внимание:
1. Автоматизированный угледобывающий комплекс КМ138ТП, М., Гипроуглемаш, 1994.
2. Авторское свидетельство СССР N 310044, кл. E 21 C 27/00, 1971.
3. Способ определения положения комбайна по давлению в домкрате подъема шнека, Сб. ИГД им. А.А.Скочинского, М., 1976, с. 15 - 18.
Изобретение относится к горной промышленности и предназначено для подземной разработки угольных месторождений. Задачей изобретения является повышение надежности и достоверности определения положения исполнительного органа относительно границы уголь-порода. Для этого осуществляют замер физических или технологических свойств резания с помощью датчика порода-уголь. Замер производится одновременно по нескольким различным физическим и технологическим свойствам с помощью разнотипных датчиков. Управление исполнительным органом в виде линейной величины подъема (опускания) определяется по алгоритму "комплексного" датчика, включающему "веса" каждого типа датчика, которые задаются машинистом или автоматически по принципу самообучения. Устройство для контроля и управления включает шнек комбайна, поворотную рукоять шнека и приводной домкрат с датчиками давления и электронным блоком, обрабатывающим электрический сигнал датчика давления. Шнек снабжен одной малозубой шарошкой, расположенной на цилиндрической поверхности резцов с некоторым вылетом в сторону забоя. Электронный блок содержит частотный фильтр, выделяющий частоту ударной работы шарошки, и расшифровывает модуляцию по этой частоте, связанную с началом и концом фазы входа и выхода шарошки из активной зоны и точки выхода шарошки на породу в почве или на пропластках, с привязкой к фазе шнека, определяя положение центра от границ пласта или пластков, вырабатывая сигнал для "комплексного" датчика. 2 с. и 1 з.п.ф-лы, 4 ил.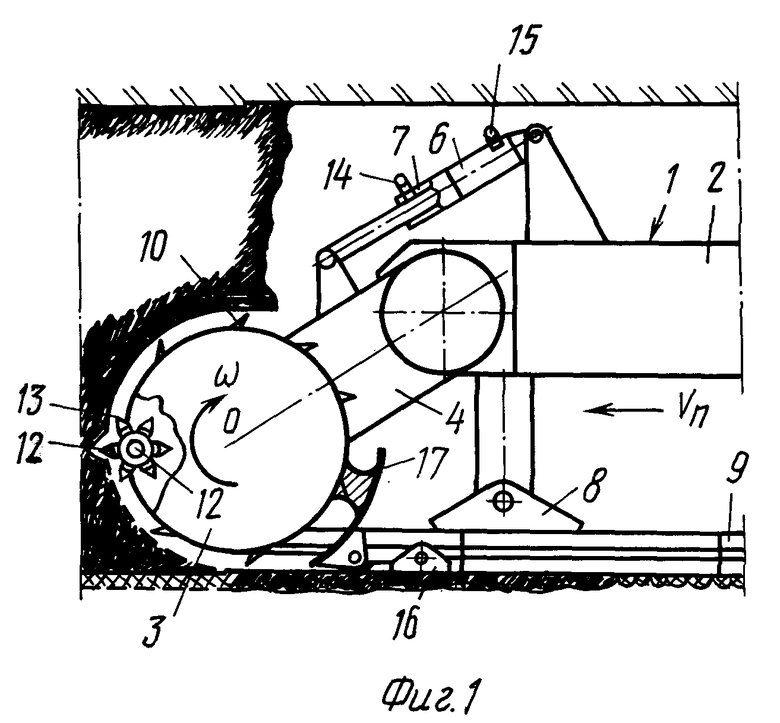
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ | 0 |
|
SU310044A1 |
| РЕГУЛЯТОР-КОПИР ДЛЯ ВЫЕМОЧНЫХ МАШИН | 0 |
|
SU252987A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1982 |
|
SU1063998A1 |
| Устройство автоматического управления исполнительным органом очистного комбайна по гипсометрии пласта | 1984 |
|
SU1245701A1 |
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| Способ определения положения комбайна по давлению в домкрате подъема шнека сб | |||
| ИГД им.Скочинского А.А | |||
| - М., 1976 | |||
| Датчик контроля открытой границы уголь-порода, ж | |||
| "Уголь", N 11, 1994, с.17. | |||
