Изобретение относится к области изготовления оребренных труб путем крепления к ним ребер из полос методом высокочастотной сварки.
Известен способ изготовления оребренных труб воздухоохладителей (авт.св. , SU, 151182, кл. B 21 C 37/22, 1962), использующий наматывание и приварку ленты с помощью индуктора тока высокой частоты.
Недостатком известного способа является отсутствие контроля качества сварного шва.
Наиболее близким к изобретению является способ диагностирования (авт.св. SU, 837675, кл. B 23 K 13/08, 1981), в котором оптически формируют суммарный поток инфракрасного излучения (ИИ) определенной зоны визирования теплового следа нагрева свариваемых деталей, трубы и оребряющей ленты, преобразуют излучение в электрический сигнал, сравнивают его с заданным пороговым уровнем.
Ограничения в применении известного способа состоят в отсутствии диагностики: сварного соединения, состояния оборудования, геометрии и структуры дефектов.
В основу изобретения поставлена задача усовершенствования способа диагностики контактного оребрения, в котором благодаря изменению приемов, операций, условий контроля и анализа характеристик формообразования сварного соединения и дефектов обеспечивается получение следующего технического результата.
Для различных условий применения при высоких требованиях к чувствительности и надежности реализуют более полный набор функций контроля и диагностики процесса сварки. Обеспечивают расширенные возможности автоматических настройки и самодиагностики; компенсационного амплитудного слежения с управлением рефлекторной оптической и электронной составляющими чувствительности; спектрального фильтрационного контроля структуры поверхности деталей; пространственно-амплитудных, градиентно-экстремальных оценок нагрева, осадки, состояния поверхности, вибрации, скорости, уровня проплавления, дефектов геометрии соответственно деталей, сварного соединения и шва, оценок состояния функционирования сварочного оборудования, а также обнаружения недопустимых дефектов несплошности, перегрева, нормы, непровара; корреляционного термограммного контроля твердости. При этом представляют пространственно- амплитудные (экстремумы, градиенты), пространственно-геометрические (центральные области; площади, объемы; расстояния; связность; разветвленность) и статистические (математическое ожидание, дисперсия, среднеквадратическое отклонение или центр, площадь, средний радиус совокупности условно-точечных объектов) информативные данные обнаружения и распознавания характеристик формообразования сварочного процесса и функционирования обеспечивающего сварку оборудования.
Поставленная задача решается тем, что в способе диагностики контактного оребрения, включающем оптическое формирование суммарного потока инфракрасного излучения определенной зоны визирования теплового следа нагрева свариваемых деталей, трубы и оребряющей ленты, преобразование излучения в электрический сигнал, сравнение его с заданным пороговым уровнем, согласно изобретению формируют термовоздействия инфракрасным излучением на объекты диагностирования, частотно фильтруют инфракрасное излучение и по нему определяют состояние поверхности, загрязнение деталей и сварного соединения, электрические преобразования осуществляют термодатчиком с точечной термочувствительной поверхностью восприятия тепловых сигналов, с формированием из них электрического сигнала Ui, где i-номер точечного элемента, накапливают временные, пространственные изменения амплитуд исходных сигналов, плоскостно их размывают и преобразуют в градиентно-экстремальные сигналы путем моделирования дифференциального уравнения теплопроводности, учитывают влияние колебаний напряжения электрической питающей сети на диагностируемые градиентно-экстремальные сигналы, по суммарному градиентно-экстремальному электрическому сигналу UΣ областей с термочувствительных элементов датчика при включении тока определяют наличие сварочного процесса, контролируют подходы к завариваемым стыкам, к окончанию одной из свариваемых деталей, обнаруживают износ, неисправность узлов оборудования и токоподводов, экстраполяционно прогнозируют их, определяют амплитуду, частоту вибраций свариваемых деталей и соединения, узлов сварочного оборудования, оценивают возможность и контролируют достижение перегрева, нормы, непровара сварного соединения, интегрированием по заданному, полученному экспериментально для данной технологии, времени остывания сварного соединения определяют непровар, норму, перегрев, по динамике движения градиентно-экстремального сигнала Ui реперных областей свариваемых деталей и оборудования диагностируют аномальные характеристики, преимущественно скорость движения, по плоскостному распределению градиентно-экстремальных сигналов Ui при наличии локальных пороговых аномалий визируемых областей контроля определяют места износа, неисправности сварочного оборудования, по градиентным уровням перпендикулярно стыку свариваемых деталей вдоль трубы контролируют требуемую симметрию нагрева, определяют осадку, геометрические дефекты, в том числе тарельчатость, гофр, прогнозируют уровень проплавления, определяют уровни адаптивного управления им, по градиентным пороговым превышениям вдоль стыка контролируют возможность появления дефектов структуры, совпадением термоградиентных кривых остывания одного из эталонных по твердости, и контролируемого участка детали или сварного соединения оценивают твердость, квантуют и бинарно преобразуют с получением позитивного Ui (1,0) или негативного Ui (0,1) контрастов градиентно-экстремальные сигналы диагностируемых объектов, преимущественно визируемых областей дефектов несплошности, локальным перегревом в процессе охлаждения или изменением типа контраста в процессах нагрева и охлаждения или охлаждения с переходом от негативного Ui (0,1) к позитивному Ui (1,0) контрасту распределения градиентно-экстремальных сигналов обнаруживают поверхностные, внутренние дефекты несплошности деталей и сварного соединения, по распределению позитивного контраста Ui (1,0) определяют геометрические центры, траектории скелетов, местоположение, разветвленность узлов протяженных траекторий, изменение направления траектории, площадь, объем, протяженность, конфигурацию, ориентацию, скорость, направление движения, статистические оценки распределения объектов, по распределению негативного контраста Ui (0,1) определяют замкнутость траекторий, конфигураций объектов, расстояния между ними.
На фиг. 1 представлена блок- схема устройства термосенсорной диагностики (ТД), реализующего заявляемый способ для примера контактной сварки спирального оребрения труб (СОТ), поясняющего одну из возможных реализаций способа в контуре проведения технологического процесса с расположением зон визирования тепловых следов формообразования.
В таблице показаны характеристики диагностирования и визирования ТД СОТ.
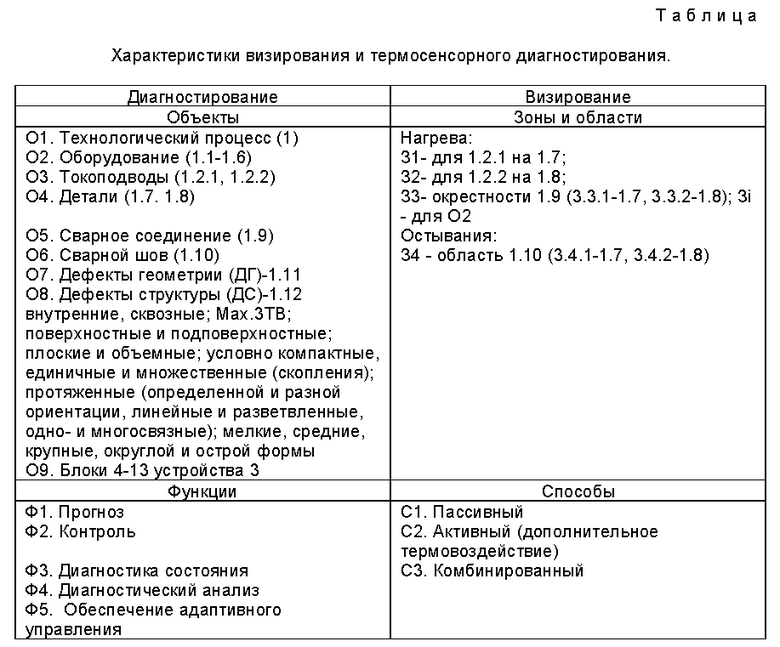
На фиг. 2 - иллюстрация функциональной структуры ТД в техпроцессе СОТ.
На фиг. 3 - пример структурно-временных процессов ТД СОТ.
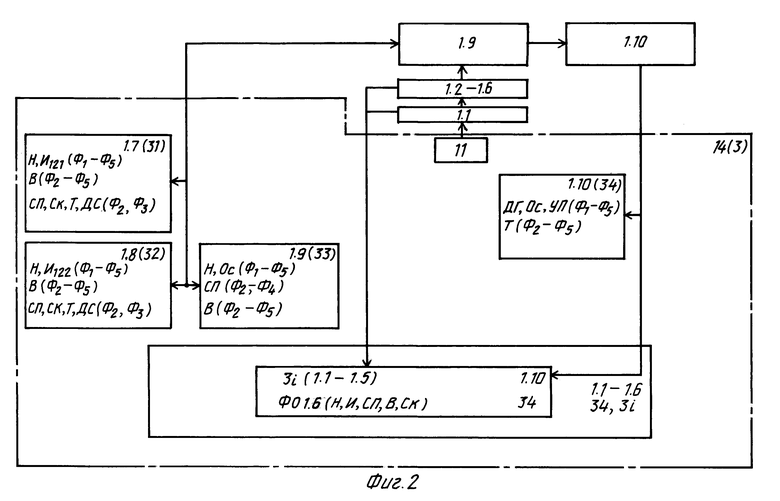
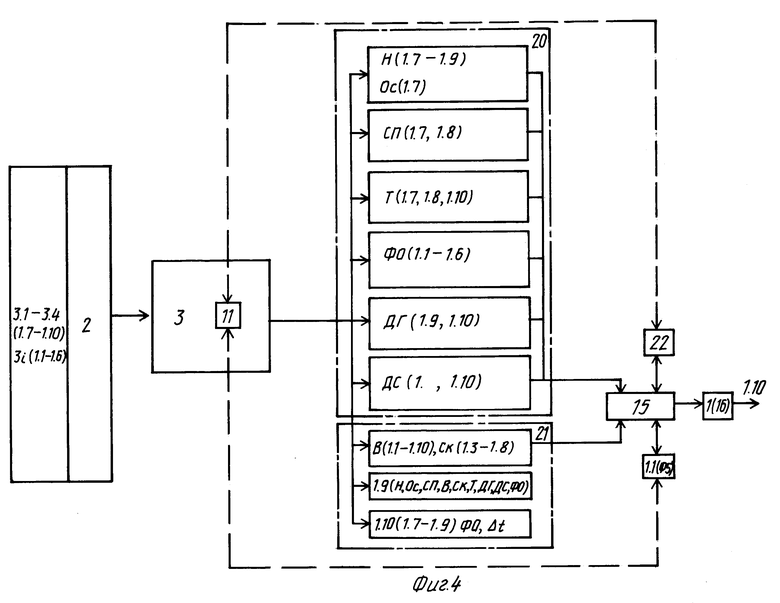
На фиг. 4 - пример информационной структуры ТД СОТ.
На фиг. 5 - блок-схема основных взаимосвязей операционных преобразований ТД СОТ.
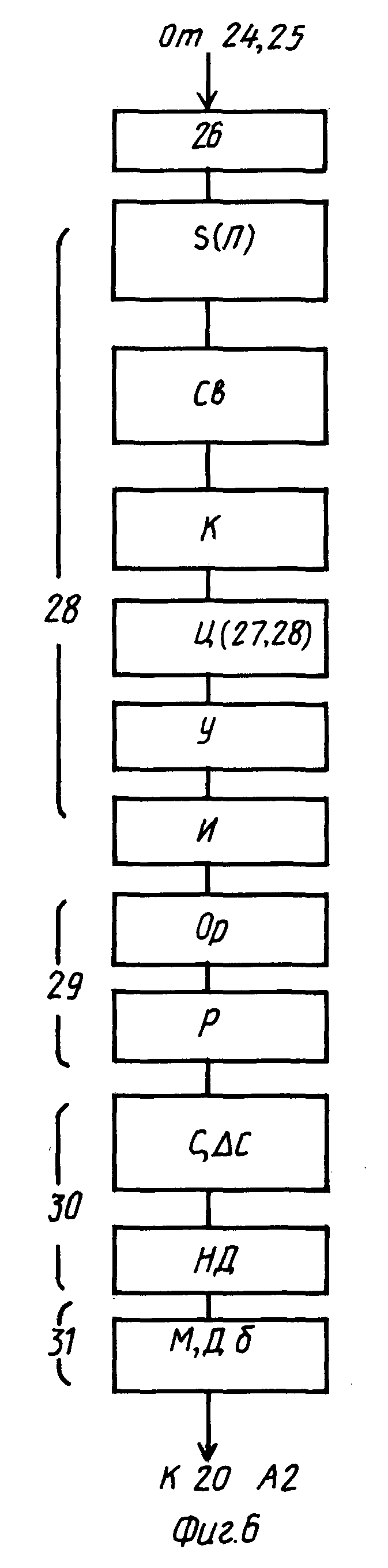
На фиг. 6 - алгоритм А1 термосенсорных диагностических оценок амплитудных изменений ТД СОТ.
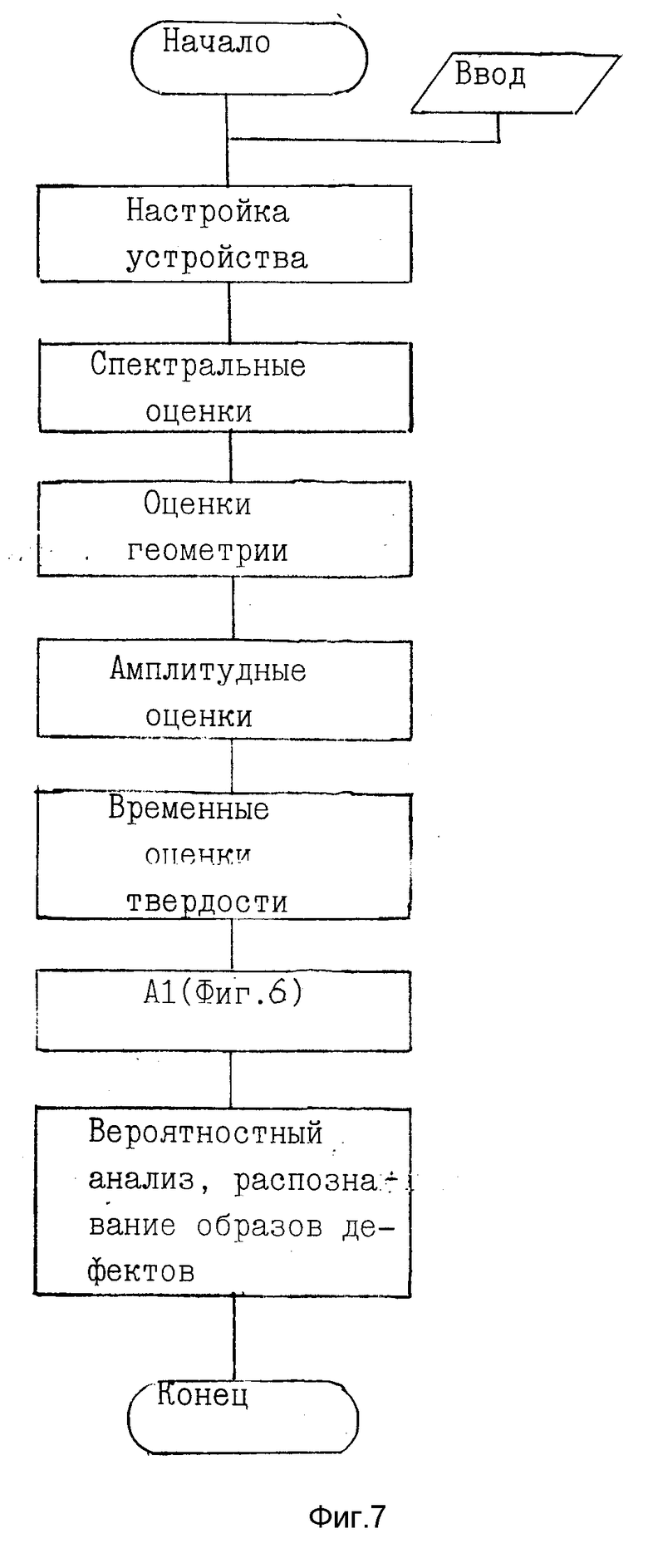
На фиг. 7 - алгоритм A2 диагностирования тепловых образов по тепловым следам ТД СОТ.
Предусматривается учет дистанционной передачи ИИ посредством световодов, в частности зеркальных отражателей или световолоконных эндоскопов (для упрощения на фиг. 1 не показано).
В контуре блок 1 (фиг. 1) технологического процесса включает систему управления сваркой 1.1, в качестве которой могут использоваться такие объекты, как различные автоматизированные системы, наладчик при их настройке или рабочий-сварщик. Кроме того, в состав блока 1 входят: источник тока высокой частоты 1.2 с кондукторами 1.2.1, 1.2.2 контактного токоподвода свариваемой детали; привод 1.3 ленты; привод 1.4 сварочного давления осадки (в том числе прижимной ролик); привод 1.5 трубы; система охлаждения 1.6; оребряющая лента 1.7; оребряемая труба 1.8; сварное соединение 1.9; сварной шов 1.10; возможные дефекты геометрии (ДГ) 1.11 и дефектные структуры 1.12. Соответственно визируются зоны контроля: на 1.7-ZI, на 1.8-Z2, на 1.9-Z3, на 1.10-Z4.
Объекты пассивного визирования 1.1-1.12 (фиг. 1, таблица) в процессе СОТ или внешнего дополнительного нагрева (активное визирование) обладают тепловыми следами 2 теплового образа процесса плавления, диагностирование состояния которого является целью ТД.
Термосенсорное диагностическое устройство 3 включает рефлекторный оптический блок 4, вспомогательный излучатель 5, пространственно-временной фильтр 6, спектральный фильтр 7, термодатчик излучения 8, с точечными поверхностными термочувствительными элементами i, основной излучатель 9, датчик температуры среды 10 (составляющие оптико-электронный канал, визируемый на зоны тепловых следов 2 непосредственно или через световод, причем таких каналов в устройстве 3 может быть несколько), а также операционный блок 11, регистратор 12. Кроме того, в устройство 3 может входить привод 13.
Для надежной защиты от искр, выплесков при настройке и выборе режимов перед оптико-электронным(и) каналом(и) может быть поставлен(ы) пропускающий(е) ИИ, например сеточный(е) экран(ы) из высокотеплопроводного металла (на фиг. 1 для упрощения не показаны).
Рефлекторный оптический блок 4 представляет собой зеркальный объектив с основной площадью восприятия теплового следа 2 и с областью, открытой для пропуска вспомогательного излучения излучателя 5. Оптическая ось этой области совместима с оптическими осями аналогичных пропускающих областей фильтров 6 и 7 и воспринимающей области термодатчика 8, геометрия которых подобна геометрии блока 4. Основная функция блока 4 состоит в формировании на фильтрах 6, 7 и термодатчике 8 излучения от теплового следа 2 или излучения от основного излучателя 9 одновременно с пропусканием вспомогательного ИИ от излучателя 5. В состав блока 4 может входить привод 13, электрически управляемый блоком 11 для фокусировки и ориентации. Вспомогательный излучатель 5 электрически подключен к блоку 11 и оптически ориентирован на вспомогательную область термодатчика 8 через соответствующие области блока 4 и фильтров 6, 7.
Инфракрасный излучатель 5 для различных задач в разное время по программе блока 11 обеспечивает функции начальной и текущей калибровки, тестирования и гетеродинирования.
Пространственно-временной фильтр 6 электрически управляющим входом соединен с блоком 11 и оптически соосно расположен между излучателем 5, блоком 4 и фильтром 7. Он реализуется многоэлементной, в частности, жидкокристаллической структурой с оптической прозрачностью в зависимости от величины и геометрии подачи на электроды соответствующих элементов потенциалов с блока 11. В набор управляющих функций фильтра 6 входят: обтюрация, расфокусировка с использованием корреляционной оптической фильтрации; электронное вращение полосового фильтра относительно оптического центра изображения входного излучения с шириной полос пропускания и перекрытия, информативной для определенных условно статических (на время операционного преобразования) или движущихся объектов контроля; формирование вращаемого относительно совмещенных центров изображения конфигурации одного из эталонных объектов по отношению к распознаваемому.
Спектральный фильтр 7 электрически соединен входом с выходом блока 11 и оптически соосно расположен между фильтром 6 и термодатчиком 8. Функцией фильтра 7 является спектральная фильтрация входного излучения с возможным управлением от блока 11.
Термодатчик излучения 8 электрически соединен с блоком 11 с возможностью управления чувствительностью, контрастом и оптически расположен между фильтром 7 и излучателем 9. На пути проходящих через фильтр 7 основного визируемого от блока 4 и вспомогательного от блока 5 ИИ. Назначение датчика 8 - пространственно-временное преобразование в электрические сигналы основного и вспомогательного ИИ.
В зависимости от конкретных задач сварки и исполнения оптико-электронных каналов термодатчик 8 может быть выполнен в следующих видах.
Как отдельные термоприемники, в том числе пироэлектрические, обычные или позиционно-чувствительные модули ИИ, ориентированные по объектам визирования (см. табл. 1 и фиг. 1): окрестности Z1, токоподвода 1.2.1 на 1.7; окрестности Z2 1.2.2 на 1.8: зона Z3 сварного соединения 1.9: зона Z4 сварного шва 1.10: зоны Zi соответственно оборудования 1.1-1.6.
Отдельные каналы визируются на контролируемые поверхности 1.1-1.5 и могут быть упрощенными (например, содержат только термодатчик 8, с пироприемником или пироэлектрической линейкой). При узкой специализации в термодатчике 8 используются двухплощадочные пироэлектрические модули с ориентацией вторых площадок на визируемый излучатель 5, с условным центром, располагаемым по оси траектории шва в свободной области (не обязательно в центре) визирования.
Как многоэлементные структуры полупроводниковых чувствительных элементов обнаружения и распознавания объектов ИИ с электронным сканированием перечисленных областей и зон визирования. Как комбинация позиционно-чувствительных модулей обнаружения и многоэлементных структур распознавания объектов ИИ.
Как совмещение фиксированных по визированию модулей и структур с дополнительным исполнением многоэлементных структур поискового визирования (блок 4 с приводом 13) дефектов в зонах 31- 34.
В ряде случаев для поискового визирования целесообразна подобная зрительной структура с более частым расположением элементов к кольцевой области, внутри пропускающей ИИ излучателя 5.
Возможно объединение фильтров 6, 7 и термодатчика 8 в единую полупроводниковую структуру, что хотя и сложно технологической проработкой на начальном этапе, но имеет преимущества в обеспечении надежности, весе, габаритах, технологичности и в конечном счете снижении цены при серийном изготовлении.
Инфракрасный излучатель 9 электрически соединен с блоком 11 и оптически ориентирован, как показано на фиг. 1, на блок 4. Функции излучателя 9 в разное время составляют: начальную и текущую калибровку, тестирование, гетеродинирование, активное визирование направления на объект, обеспечение спектральных оценок и основное - импульсную или непрерывную генерацию ИИ при сканировании контролируемого объекта.
Датчик температуры среды 10 подключен выходом к операционному блоку 11 и реализуется на базе контактного полупроводникового термоприемника, формирующего абсолютные значения температуры.
Операционный блок 11 представляет собой компьютер с интерфейсными узлами сопряжения на аналоговых входах и выходах. В конкретных специализированных применениях возможна микропроцессорная или аналоговая реализация блока 11. Обеспечиваемые программно и связями с блоком 1, с излучателями 5, 9, с фильтрами 6, 7, с термодатчиками 8, 10 с регистратором 12 функции блока 11 состоят в преобразованиях: исходной настройки с учетом визирования и фокусировки на информативные области и зоны; амплитудного слежения по калибровке чувствительности, по оценке излучательной способности объекта и потерь поглощения пропускающей средой; корреляционно- термограммной оценки твердости, обработки сигналов КС, распознавания информативных условно точечных и протяженных объектов по их оценкам преимущественно на основе далее рассматриваемых базовых моделей.
При формировании оценок обнаружения исходных объектов формирования (точечных, одно-, двух- и трехмерных, сводящихся к двухмерным сечениям; на время преобразования условно статическим и движущимся; различных характеристик площади и геометрии; преимущественно инвариантных к масштабу и положению в поле изображения; контрастного позитивного или негативного фона) базовая модель имеет вид
при условно статической на время быстродействующей реализации (1) области задания с коэффициентом преобразования К сигналов исходного изображения E (x,y) в сигналы преобразованного изображения И (x,y) с координатами X, Y.
Коэффициентами а, b соответственно моделируют накопление, размытие сигналов. Таким образом с учетом коэффициентов a, b, k могут сглаживаться малоразмерные, импульсные помехи на исходном E(x,y) во времени t. Базовая динамическая модель имеет вид
с движущейся областью задания и проекциями векторов скоростей Vx на горизонтальную ось X, Vy на вертикальную ось Y.
Однозначность базовых моделей (1) и (2) определяется начальными условиями И0 = E(x,y) и граничными условиями
Исходные E(X,Y), представляющие обычно сигналы тепловых изменений с выходов пироприемников термодатчика 8, динамически преобразуются в градиенты И(X, Y) с информативным дублирующим представлением информации об амплитуде и соответствующей ей площади растекания исходного воздействия.
Рассмотренные мощные фильтрационные преобразования (1), (2) позволяют существенно отстроиться от изменяющейся излучающей способности, теплофизических характеристик материалов и теплоотдачи, значительно искажающих результаты термоконтроля ИИ.
Показанные в различных формах уравнения теплопроводности модели (1) и (2) линейны при непрерывной, изотропной области задания, с независимостью физических свойств модельной среды от коэффициентов а и b в границах Xо-Xг, Yо-Yг кадра изображения. Тем самым они корректны и имеют доказательства существования, единственности, устойчивости решения. Такое решение с высоким быстродействием и несложной программно-технической реализацией может быть получено с помощью интеграла свертки, т.е. с использованием известных методов и средств оптической и электронной расфокусировки. Возможна также реализация методами цифрового, аналогового, квазианалогового (эквивалентного по результатам) моделирования с помощью конечно-разностной аппроксимации, с использованием фундаментального решения Кельвина и др.
Для сложных зашумленных информационных массивов универсальная программная компьютерная или специализированная программно-микропроцессорная реализация в блоке 11 базовых моделей (1) или (2) позволяет с повышенной точностью и эффективностью формировать закономерности накопления и размытия накопленных сигналов.
Регистратор 12 электрически подключен к выходу операционного блока 11 и определяется, в частности, средствами компьютерной реализации отображаемых от блока 11 характеристик объекта и сигналов управления. Регистратор 12 призван обеспечить настройку, регулировку, наглядность результатов выполняемых основных функций устройства.
В отдельных случаях конкретных применений устройство 3 может быть существенно упрощено за счет соответствующих конструкций термодатчика 8, блока 4 и привода 13 (вплоть до отсутствия, при этом электронное сканирование с достаточной эффективностью блока 4 и чувствительностью датчика 8 имеет преимущества в обеспечении надежности), отсутствия фильтра 6 с перенесением его функций на программную обработку в блок 11.
Реализация базовых преобразований (1) и (2) различными способами также увеличит гибкость обеспечения универсальных возможностей устройства. Так, оптическая расфокусировка может реализоваться блоками 4, 11 посредством привода 13. Однако она связана с введением только Гауссова расфокусирующего преобразования и энергоемкими операциями.
Эквивалентное расфокусировочное преобразование исходного излучения можно получить периодической подачей на условно центральные чувствительные элементы двухплощадочных (многоплощадочных) пироэлектрических элементов термодатчика 8 вспомогательного гетеродинного излучения с излучателя 5.
Оптическая корреляция, использующая расфокусирущие маски в фильтре 6, управляемом блоком 11, может быть более универсальной и быстродействующей, но связана с относительной сложностью изготовления фильтров.
Вместе с тем, в наиболее полных объемах аппаратурно-программное использование блоков 4, 11, излучателей 5, 9, фильтров 6, 7, термодатчиков 8, 10, регистратора 12 и привода 13 как для начальных преобразований и базового моделирования, так и для обеспечивающих операционных преобразований существенно увеличит возможности устройства и упростит программную обработку.
Визирование согласно примеру на фиг. 1 может осуществляться на стадии настройки, отработки технологических режимов. При этом на образцах при отработке режимов в различных ракурсах могут использоваться все зоны Z1-Z4.
Для наблюдения и геометрической оценки в зонах Z1-Z3 может применяться как пассивный прием излучения, так и активная подсветка (с помощью излучателя 9), а также и прием в различных частях фильтра 7 и чувствительных элементов термодатчика 8.
Может быть использована автоматическая регулировка оптико-электронного канала и режима активного визирования с помощью управляемого приводом 13 объектива 4. Это целесообразно в ряде случаев при уточняющем сканировании места предварительно обнаруженного градиента экстремума дефекта несплошности.
С учетом выполняемых функций и преобразований визируемые сигналы подлежат сканированию по термочувствительным элементам i или суммированию по ним с визированием областей свариваемой конструкции для плоскостей разных сочетаний координат X, Y, Z.
Зона Zj с маркерным чернением (ξ ≈ 1, нанесенным, например, краской) на локальной области системы 1.4 используется для визирования движения при осадке.
Площадь визируемой области, расстояние до нее и угол визирования (с учетом закона Ламберта) выбираются из условий достаточной чувствительности и помехозащищенности (в первую очередь от перегрева, брызг расплавленного металла и других вредных для оптоэлектроники термохимических воздействий) по конкретным технологии, динамике движения или временного режима сварки.
При автоматической регулировке оптикоэлектронных каналов устройства, имеющей преимущества при поиске дефектов несплошости на протяженных участках контроля, используют фокусирующее обострение от преобразования (1) для определения фокусного расстояния до объекта. В этом случае целесообразна и автоматическая поисковая оптическая ориентация на обнаруженный объект по его центру.
В соответствии с ориентированной на ТД классификацией дефектов (07) и конкретизаций таблицы по отдельным технологиям ТДСОТ определяется следующим.
Информативными признаками трещин (08 таблица) являются их форма (наличие острых краев), размеры, опасная ориентация, разветвленность, расстояния между ними. Особо информативные признаки скоплений, пор, раковин - математическое ожидание, дисперсия, среднеквадратическое отклонение или расположение, площадь и средний радиус совокупности дефектов на плоскости.
Рассмотренные согласно табл. 1 и фиг. 1 зоны областей и способы визирования соответствуют в различных сочетаниях функциям Ф1-Ф5 диагностирования в широком смысле и ФЗ - в узком по объектам 01-09.
Представленный пример функциональной схемы ТД технологического процесса контактного СОТ на фиг. 2 позволяет совместно с табл. 1. выделить совокупность функциональных элементов и блоков ТД 14, обеспечиваемой устройством 3 с операционным блоком 11.
Ими являются для ленты 1.7 (Z1), определяемые нагревом Н: износ И 1.2.1 по функциям Ф1-Ф5; оценки вибрации В (Ф2-Ф5); состояния поверхности СП, скорость Ск, твердость Т, дефекты структуры ДС (Ф2-ФЗ).
Подобно 1.7 для трубы 1.8 (Z2): Н, И 1.2.2 (Ф1-Ф5); В (Ф2-Ф5); СП, Ск, Т, ДС (Ф2,ФЗ).
Для сварного соединения 1.9 Z3: нагрев Н, осадка Ос (Ф1-Ф5); состояния поверхности СП (Ф2-Ф4); вибрации В (Ф2-Ф5).
При диагностировании оборудования по Zi оценивается его функционирование Ф0 по Ф1-Ф5 для блоков 1.1-1.6. Причем определяющим надежность технологической системы и соответственно качество сварного шва 1.10 (Z4) является функционирование системы охлаждения 1.6 (нагрев Н, износ И. состояния поверхности (загрязнения) СП, вибрации В).
Для сварного шва 1.10 (Z4) определяются: дефекты геометрии ДГ и структуры ДС, уровень проплавления УП (Ф1-Ф5); твердость Т (Ф2-Ф5).
Выявленные согласно фиг. 2 функциональные блоки и диагностируемые состояния технологического процесса позволяют выделить структурно-временные процессы этапов ТД СОТ (фиг. 3).
Определяющими ТД результатами разработанной технологии (блок 15) являются оценки: интенсивности подводимой энергии Э нагрева Н (1.7-1.9) и осадки Ос (1.7); износа и функционирования оборудования Ф0 (1.1-1.6); состояния поверхности СП (1.7-1.10); вибрации В (1.1-1.10); скорости Ск (1.3-1.8); твердости Т (1.7, 1.8, 1.10); дефектов геометрии ДГ (1.9, 1.10); дефектов структуры 1.7 (1.10); уровня проплавления УП (1.10). Полученные в блоке 15 результаты должны учитывать производственные изменения (блок 16), условно разделяемые по скорости изменений.
Возможные наиболее быстрые изменения питающей сети в блоках 1.1 -1.6 согласно блоку 17 определяют Н, В, Ск, ДГ, ДС, УП, ФО в 1.7- 1.10.
Предполагаемые отклонения геометрии и структуры деталей 1.7, 1.8, сварного соединения 1.9 и шва 1.10 согласно блоку 18 характеризуют обычно более медленные производственные изменения, происходящие со скоростью сварки.
Они определяются: загрязнениями, характеризующими состояние поверхности СП и влияющими на Т, ДГ, ДС, УП, ФО; вибрацией В, влияющей на Н, Ос, Т, ДГ, ДС, УП, ФО; твердостью Т, связанной с Н, Ос, И, В, ДГ, ДС, УП, ФО; дефектами геометрии ДГ, характеризующими Н, Ос, И, В, Сг, УП, ФО; дефектами структуры, связанными с Н, Ос, И, СП, В, Ск, Т, УП, ФО.
Существенно более медленными являются производственные изменения износа (блок 19). Это, во-первых, износ И токоподводов 1.2.1, 1.2.2, связанный с Н, Ос, И, СП, В, Ск, Т, ФО. Во-вторых, износ И, функционирования оборудования ФО, связанные с Н, Ос, СП, В, Ск, Т, ДГ, ДС, УП, ФО.
Пример использования ТД в разработке технологии (блок 15) с учетом производственных изменений (блок 16) СОТ может позволить посредством термосенсорного устройства 3 (блок 14) адаптивно управлять через систему управления 1.1 сварочным процессом. При этом могут быть достигнуты максимальная технологичность, необходимое качество сварного шва 1.10 по рациональному уровню проправления УП и допустимому уровню дефектов геометрии ДГ и структуры ДС.
Реализация рассмотренных функций ТД согласно условного (хотя бы по разделению плоскостных и временных состояний) примера информационной структуры ТД СОТ на фиг. 4 состоит в следующем.
На входе термосенсорного устройства 3 подлежат визированию: зоны Zi оборудования 1.1-1.6; зоны Z1-Z4 свариваемых деталей 1.7, 1.8 и сварного соединения 1.9 ; сварного шва 1.10.
В результате ТД должны формироваться информативные данные о плоскостных состояниях (блок 20): деталей 1.7, 1.8 с оценкой нагрева Н, осадки Ос, состояния поверхности СП, твердости Т, дефектов структуры ДС; износа И токоподвода 1.2.1, 1.2.2 и функционирования оборудования 1.1-1.6; сварных соединений и шва 1.10 с оценкой нагрева Н, дефектов геометрии ДГ и структуры ДС. А также о временных состояниях (блок 21): вибрации В (1.1-1.10); скорости Ск (1.3-1.8); твердости Т (1.2, 1.8, 1.10); сварного соединения 1.9 с оценками Н, Ос, СП, В, Ск, Т, ДГ, ДС, ФО; сварного шва 1.10 в сопоставлении с диагностическими характеристиками деталей 1.7, 1.8 сварного соединения 1.9, оборудования 1.1-1.6 и циклами работы персонала, выполняемой программы и т.д.
Данные о плоскостных (блок 20) и временных (блок 21) состояниях на этапе разработки технологии (блок 15) определяют статистическую обработку (блок 22), оперативное управление (адаптивное для автоматизированных процессов) Ф в системе 1.1 и само производство (блок 16) сварной конструкции 1.10.
Получение информации о плоскостных и временных состояниях определяется взаимосвязью операционных преобразований ТД СОТ, показанных на условном по классификации примере фиг. 5.
Вспомогательный блок 23 спектрально-амплитудных преобразований характеризует посредством спектрального оператора градиентного сигнала Г(Hλк) состояние (загрязнение) поверхностей СП (Ф2-Ф4, 1.7-1.10) деталей, определяющее излучающую способность ε (x, y, z, t; Ф2; 1.1-1.10) и причины дефектов (Ф4) для возможного их устранения (Ф5). Уровень излучающей способности уточняет амплитудную и амплитудно-временную информацию (блоки 24,25).
Функцией базового блока 24 являются амплитудные термооценки (Ф1-Ф5): нагрева Н, функционирования оборудования ФО (1.1-1.6), осадки Ос (1.7), (1.2.1,1.2.2), полученных посредством реализации по (1) из E(x,y) оценок приращений градиента Г или площади П(S) визируемой области Zi; нагрева Н (1.7-1.9), дефектов геометрии ДГ (1.9, 1.10) - посредством реализации по (1) оценок симметрии приращений относительно стыка по sign Г(x,y), sign П(x,y); дефектов структуры ДС (1.7-1.10) - посредством реализуемых по (1) оценок приращений Г(x,y), П(x,y).
Амплитудно-временные термооценки в блоке 25 могут разделяться по нагреву и по охлаждению.
Термооценки нагрева: быстрые изменения вибрации В и определяемого ими функционирования оборудования ФО посредством оценок реализуемых по (1) градиентов Гн(t) и (или) соответствующих им площадей Пн(t).
Причем если непосредственно определяющие термооценки колебания напряжения питающей сети просто измерить электрически, то сложные колебания режимов в 1.1-1.9 определяются посредством реагирующих на термоизменения в пространстве и во времени пироэлектрических преобразований. При этом для оценок охлаждения рационально термоизмерение контактным или бесконтактным датчиками, а для скорости - пироэлектрически, посредством оптико-электронного канала устройства 3. Тем самым контролируется температура, скорость, расход охлаждающей жидкости.
Термооценки охлаждения определяют корреляционную оценку твердости по максимальному совпадению кривых охлаждения контролируемой Г(t) и эталонной Гэ(t) твердостей, визируемых реперных точек или сводящихся к ним интегральных оценок зон Z1(1.7), Z2(1.8), Z4 (1.10). Термооценки охлаждения позволяют оценить также уровень проплавления УП (1.10), определяемый по временному накоплению в пределах зоны Z4 суммы полученных по (1) точечных градиентов Г.
Блок 26 преобразует исходные амплитудные сигналы к нормированному уровню E(x, y), далее везде, если не оговорено обратное, позитивного контраста Ui(1,0) (высокий уровень 1 - объект, низкий 0 - фон), достаточного по амплитуде для последующих преобразований на базе (1) и (2), которые пространственно используются в блоках 27-31.
Блок 28 представляет собой геометрические оценки: нагрева Н 1.7-1.9(31-33); осадки Oc1. 7(33); износа И 1.2-1.6(3i); состояния поверхности 1.7-1.10(31-34): твердости T1. 7,1.8,1.10(31,32,34); дефектов геометрии ДГ1.9(33), 1.10(34); дефектов структуры ДС 1.7(31), 1.8(32), 1.10(34); уровня проплавления УП1.10(34); функционирования оборудования ФО 1.3-1.6(3i). А также операторы геометрических оценок: площади П; связности (замкнутости) Св; конфигурации К; центрального (скелетного) преобразования Ц, которое может определить блок 27 нормирования площади; узлов У; изменения направления траектории ИТ.
Блок 29 оценок взаимного положения на основе нормирования от блоков 26 и 27 амплитуды и площади (в ряде случаев нормирование по площади необязательно) представляет оценки Н, Ос, И, ДГ, ДС, СП, Т, УП, ФО, определяемые оператором расстояния Р, например, между траекториями Ц скелетов трещин, скоплений дефектов или между реализациями случайного процесса, распознаваемыми на принадлежность к определенному из диагностируемых состояний. А также оценки, определяемые оператором ориентации Ор, например, распознавания опасного направления траекторий трещин, скопления дефектов.
Блок 30 на основе нормирования от блоков 26 и 27 амплитуды и площади (в ряде случаев нормирование по площади необязательно) представляет в виде использования операторов оценок скорости Ск и направления движения НД для 1.3-1.10 основные динамические оценки; осадки Ос; износа И; функционирования оборудования ФО; дефектов геометрии ДГ и структуры ДС; реализации случайного процесса для распознавания диагностируемых состояний.
Блок 31 на основе нормирования от блоков 26 и 27 амплитуды и площади представляет в виде операторов М, Д, δ вероятностные оценки: например, скоплений пор, раковин; реализации случайного процесса формирования распознаваемых состояний по всем или отдельным функциям Н, Ос, И, СП, В, Ск, Т, ДГ, ДС, УП, ТО.
В дополнении к фиг. 5 в таблице даны классификация и взаимосвязи рассматриваемых функций и преобразований ТД СОТ.
Представленный фиг. 6 алгоритм A1 термосенсорных диагностических оценок амплитудных изменений содержит кроме амплитудных градиентно-экстремальных оценок все рассмотренные на фиг. 5 операционные преобразования. Сущность показанных на фиг. 6 и на фиг. 5, в блоках 24, 25, 28-31, операторов, реализующих преобразования (1), (2) из нормированного E(x,y), состоит в следующем.
Исходные нормированные блоком 26 по амплитуде сигналы ТД СОТ преобразуются оператором площади П (что, например, у подповерхностного дефекта соответствует объему). Он частично дублирует на плоскости амплитудные сигналы Г, фиксируя в заданный момент времени амплитуду центральной области объекта, пропорциональную площади растекания входного E(x,y).
Оператор связности Св характеризуется пороговым пропусканием от замкнутого внутреннего выреза сигналов, меньших фона после преобразования (1) исходного негативного контраста объекта E(x,y), где фон представляется высоким уровнем, а объект - нулевым. Наличие такого сигнала определяет замкнутость, количество таких сигналов для объекта определяет его связность, а амплитуда внутри его выреза - его площадь.
Оператор конфигурации К реализуется сопоставлением представленной E(x, y), контролируемой и накладываемой на нее соосно вращением относительно ее центра эталонной конфигурации Кэ с фиксированием их совпадения при наименьшем рассогласовании. Оператор предварительно нормированной по амплитуде центральной (скелетной) области Ц реализуется пороговой селекцией вершины рельефа растекания по преобразованию (1). В сплошных объектах он в итоге представляет компактную центральную область, а для протяженных участков (трещин, раковин, скоплений пор и т.д.) скелетные траектории.
Оператор узлов (разветвлений) У перед преобразованием (1) нормируемого по амплитуде и площади изображения E(x,y) исходной траектории определяется пороговой фиксацией увеличения амплитуд в месте энергетического скопления, в узлах У.
Для определения оператора изменения направления траектории И нормированного перед преобразованием (1) по амплитуде и площади изображения E(x,y) исходную траекторию рассматривают на участке фиксированной области с наибольшей стороной, перпендикулярной направлению траектории. При отклонении на этом участке траектории фиксируется увеличение ее площади, пропорциональное изменению траектории. Рассматриваемые операторы П, СВ, К, Ц, У, И соответствуют предварительно нормированным по амплитуде (блок 26) и выборочно по площади (блок 27) характеристикам геометрии объектов (1.1-1.10) согласно блоку 28 (фиг. 5 и 6).
Оператор ориентации Ор определяется наложением на исходное для преобразования (1) изображение E(x, y) полосового фона, вращаемого на заданный угол ориентации. Вместо вращения фона может быть использована и вращаемая на угол ориентации анизотропная фильтрация E(x,y). Промодулированные таким образом объекты, совпадающие с информативной ориентацией, дадут сигналы достаточной амплитуды, проходящие пороговое преобразование.
Оператор расстояния Р определяется наложением на исходное для преобразования (1) из E(x,y) вращаемого полосового фона. В промодулированном таким образом сигнале исходного E(x,y) негативного контраста Ui(0,1) с попавшими в полосу пропускания условно точечными объектами, отрезок расстояния между ними в отличие от участка расстояния объекта до границы изображения имеет размытые фронты начала и окончания. По амплитудам центральной части этого отрезка оценивают расстояние.
Рассматриваемые операторы Ор и Р соответствуют предварительно нормированным по амплитуде (блок 26) и выборочно по площади (блок 27) характеристикам геометрии объектов (1.1-1.10) согласно блоку 29 (фиг. 5 и 6).
Операторы скорости Ск и ее изменения выделяются при преобразовании (2): по искажениям переднего и заднего фронта в направлении движения пропорциональным Ск; по растягиванию площади следа; по снижению амплитуды.
Оператор направления движения НД определяется наложением на исходное при преобразовании (2) изображения E(x,y) полосового фона, вращаемого на информативный угол направления. Здесь так же, как для оператора Ор, может быть использовано анизотропное преобразование E(x,y). Промодулированные таким образом объекты, совпадающие с информативным направлением, дадут сигналы достаточной амплитуды, проходящие пороговое преобразование. Селекция приближения или удаления производится по крутизне фронта в направлении движения.
Рассматриваемые операторы Ск и НД соответствуют предварительно нормированным по амплитуде (блок 26) и выборочно по площади (блок 27) характеристикам геометрии объектов (1.1-1.10) согласно блоку 30 (фиг. 5 и 6).
Вероятностные операторы математического ожидания М, дисперсии Д, среднеквадратического отклонения характеризуются пороговой селекцией вершин обобщенного рельефа растекания преобразованной по (1) совокупности. Причем пороговые преобразования вершины определяют: центральное положение области - М, ее амплитуда - Д, а квадратично преобразованное значение амплитуды - δ .
Оценки М, Д, δ могут быть эквивалентны распределению термоотклика от дефектов скопления пор, раковин, при этом: М - соответствует центру скопления, Д - площади, δ - среднему радиусу. Рассматриваемые операторы М, Д, δ соответствуют предварительно нормированным по амплитуде (блок 26) и выборочно по площади (блок 27) характеристикам геометрии объектов (1.1-1.10) согласно блоку 31 (фиг. 5 и 6).
Работа устройства согласно фиг. 6 и 7 осуществляется следующим образом.
После включения устройства по алгоритму А2 (фиг. 7) производится ввод исходной информации в блок 11, заключающийся в следующем.
Через значения электрических потенциалов И, Ив задают значения потоков исходных Ф и вспомогательных Фв излучений и эталонные для конкретного вида сварки (полученные ранее экспериментально) характеристики. В память блока 11 вводят входные и эталонные кадры изображений электрических потенциалов тестирования ИТ, Иэ. Формируют согласно рассмотренному по фиг. 2-5 соответствующие конкретному технологическому процессу параметры, пороговые значения и характеристики, прежде всего определяющие выявленные согласно фиг. 5 операционные преобразования различных зон и областей визирования. Их аргументами являются координаты x,y, длина волны λ время t. Введенные исходные данные используют на начальном этапе в настройке, обучении и далее в периодической программной самодиагностике и самонастройке.
Настройка устройства 3 по программе блока 11 состоит из следующих операций.
Управляемый блоком 11 излучатель 5 формирует тепловой поток Фв, величина которого определяется разностью потенциалов ΔИ электрических сигналов температуры среды Ис (формируется в блоке 11 от термодатчика 10) и температуры И исходного ИИ (фиксируется блоком 11 от термодатчика 8). Изменяющаяся температура среды посредством связей датчика 10 и блока 11, изменений в основном функционировании посредством связей блок 11- излучатель 5 - термодатчик 8 - блок 11 отслеживается разностным сигналом, корректирующим первичное значение И. Таким образом стабилизируется разностный поток теплового излучения с излучателя 5 для настройки и последующих самодиагностики и преобразований. Подобно рассмотренному обеспечивается стабилизация разностного уровня ΔИ внешнего теплового потока с излучателя 9 посредством связей датчик 10 -блок 11 и блок 11- излучатель 9 - датчик 8 - блок 11. В обоих случаях при стабильном формировании излучения формирователей 5 или 9 даже при небольших значениях тепловых разностных сигналов, но при малом времени t легко получить значительные изменения Ф(U) во времени t.
Например, не сложно воспроизводимым изменениям в тысячи градусов в секунду соответствует имитация высокотемпературных тепловых процессов в нормальных и экстремальных условиях формообразования (технологического и зарождений дефектов в зонах сварного соединения, термического влияния, а также в различных металлургических процессах, в шлифовке и т.д.).
Достигаются высокие точность, стабильность и большие диапазоны имитации широкого круга различных технологических и технических объектов близко к динамике реального функционирования. Посредством электронного преобразования ИИ можно не только обеспечить высокую точность настройки и самодиагностики, но даже один оптико-электронный канал многоканального устройства 3 позволяет тарировать остальные каналы. При этом регулируют усиление и выбирают положение рабочей точки в ответ на имитацию стандартных термовоздействий.
Согласно рассмотренному в режиме тестирования на излучатели 5 и 9 подаются соответствующие сигналы ИТВ ИТ управления с блока 11. Так, физически моделируются возможные реальные ситуации в нормальных и экстремальных условиях и проверяется работа всех оптико-электронных блоков и элементов устройства.
В результате нуль-компенсации тестовые сигналы излучателей 5 или 9, задаваемые блоком 11, исходные сигналы Ф из блока 2 разными путями проходят блок 4, фильтры 6, 7, термодатчик 8 и формируются блоком 11. Исходящий с блока 11 на излучатели 5 или 9 калибровочный поток Фок практически одновременно с основным потоком Ф преобразуется датчиком 8 и, соответственно, определяет нуль-компенсационный сигнал Иок (Ф-Фок), характеризующий уточненный контроль Ф с учетом электрических и оптических помех и погрешностей. Используя априорную информацию для конкретной технологии сварки посредством пространственно-управляемой блоком 11 частоты обтюрации в фильтре 6 исключают искажения входных сигналов.
Результаты проводимых одновременно оптико-электронных преобразований в пространственно-управляемых от блока 11, блоке 4, излучателях 5,9, фильтрах 6 и 7, в термодатчике 8 фиксируются и сравниваются с известными эталонными результатами тестирования, записанными в блоке 11. Оцениваются погрешности σi этих преобразований, которые соотносят с источниками их возникновения в компонентах устройства. Посредством блока 11 и регистратора 12 уменьшение погрешностей осуществляют путем регулировок оптического и электронного каналов, масштабирования в блоках и элементах устройства, и табличных корректировок в блоке 11. При необходимости узлы с нерегулируемыми σi и отказами ремонтируют или заменяют в процессе эксплуатации устройства.
Таким образом, в соответствии с заданными в блоке 11 значениями И, И(Ив), Иэ исходное Ф(Ив) и вспомогательное Ф(Ив) излучения оптически одновременно формируют в блоке 4, излучателях 5 или 9, управляют пропусканием фильтра 6, спектрально преобразуют фильтром 7 в электрические сигналы термодатчиком 8. После чего в блоке 11 производят сравнение преобразуемых сигналов с учетом заданных, в том числе пороговых и эталонных характеристик Иэ, тем самым осуществляют настройку и обучение, которые подготовят устройство к надежной работе. Подобно рассмотренному проводят самодиагностику и обработку сигналов в процессе функционирования устройства.
Настроенное моделированием и формированием термовоздействий устройство готово к реализации заявляемого способа при отработке технологии с визированием зон Z1-Z4, Zi (с обеспечением оптимизации технологии вплоть до всестороннего осмотра сварного соединения).
Согласно вспомогательному блоку спектральный оценок 23 по пассивному термоотклику от сварочного процесса или дополнительно нагретым от излучателя 9 зонам Z1-Z3 оценивается оператором i(Г) спектральный состав излучения поверхностей деталей 1.7, 1.8 с возможными на них загрязнениями. Обнаружение загрязнения деталей помогает устранить: подрезы, трещины, раковины и другие дефекты структуры материалов.
ИИ от контролируемого объекта, проходя блок 4 и фильтр 6, в спектральном фильтре 7 преобразуется по-разному в зависимости от спектрального состава. Для исключения ложного срабатывания от общего перекрытия различных спектральных элементов используют в составе фильтра 7 вспомогательный опорный фильтр для последующего разностного суммирования в блоке 11 всех, в том числе и опорного, электрических сигналов датчика 8 от зон различной фильтрации. При прохождении в контролируемой среде какого-либо объекта (детали, схвата робота и т.д.) разностного суммарного сигнала не возникает и не происходит формирования ложных сигналов. Если же в контролируемом объекте, например в сосуде или в трубопроводе, есть недопустимые дефекты, приводящие к термоградиентным утечкам, или в процессе сварки тепловые потоки проходят через спектральные составляющие фильтра 7, соответствующие появлению определенных спектральных компонент, тогда возникает разностный сигнал И(λ) обнаружения и интенсивности обнаруживаемого спектра вещества, больший порога И'.
Таким образом контролируют присутствие загрязнений свариваемых поверхностей и электродов. При этом тепловой поток, содержащий сигнал определенного спектрального максимума, разделяют путем фильтрации в разных спектральных диапазонах, а электрические сигналы отфильтрованных потоков разностно усиливают.
Далее рассмотрение существа изобретения на конкретных сугубо иллюстративных примерах его использования для различных процессов контактной, рельефной сварки не означает, что такие решения единственно возможны и исчерпывают весь объем притязаний технического решения.
Все основные преобразования, определяющие реализацию базового градиентно-экстремального оператора Г и частично дублирующего их оператора П производятся по цепи: визируемая зона теплового следа 2, блок 4, фильтры 6, 7, термодатчик 8, блок 11. Рассмотрим их.
Фиксируемые блоком 11 первичные преобразования ИИ нагрева непосредственно характеризуются функциями Ф1-Ф5 соответственно порогового обнаружения состояний: нагрева Н деталей 1.7, 1.8 и сварного соединения 1.9 (Г); уровня проплавления УП 1.10 Г(t); износ оборудования, в том числе токоподводов 1.2.1, 1.2.2 (Гi,Г); при функционировании оборудования 1.1-1.6 (Г, Гi). Косвенно ИИ нагрева Н определяет: характеризующее выделение дефектов несплошности и циклическую прочность давление осадки Ос (Гi); состояние поверхности СП (Г, Гi); вибрацию В (Г); скорость Ск (Гi); твердость Т (Г, Гi); дефекты геометрии ДГ и структуры ДС (Гi). Амплитудные, амплитудно-временные преобразования ИИ с использованием (1) позволяют получать приращение градиентов нагрева Гн.
Контролируя колебания напряжения питания электрической сети, диагностируют состояния процесса сварки, определяя причину изменений Г(t).
При включении тока сварки по превышении порогового уровня суммарного градиентно-экстремального сигнала UΣ визируемой области 1.9 определяют наличие сварочного процесса.
По UΣ, например, для ИИ окрестности 1.2.2 на трубе 1.8 может быть еще на подходе к 1.9 определен заваренный стык или окончание одной из свариваемых деталей. Это обеспечивает дополнительные возможности адаптивного управления Ф5 режимом в зоне сварки.
По градиентно-экстремальным сигналам UΣ(Ui) информативно визируемых областей узлов оборудования, в том числе токоподводов, существенными отклонениями при пороговом сравнении диагностируют неисправности, износ. Имея накапливаемую статистику по градиентам UΣ проводят экстраполяционный прогноз.
По функциям Ф2-Ф5 контроль вибрации В определяется фиксацией блоком 11 амплитудный колебаний UΣ Ui по Г(t) и их частотой. Таким образом обнаруживают аномальные вибрации деталей, сварного соединения и узлов сварочного оборудования.
По функциям Ф1-Ф5 текущий уровень провара УП определяется фиксацией блоком 11 интегральной амплитуды UΣ за t = t(Z4.1) - t(Z4.к) сканируемого пересечения зоны Z4. При этом определяются состояния: непровар, норма и перегрев, ведущие к увеличению ЗТВ и уменьшению прочности. Тем самым интегрированием UΣ по заданному, полученному экспериментально для данной технологии, времени остывания сварного соединения определяют достигнутый диагностируемый уровень УП.
По функциям Ф2-Ф5 динамические характеристики движения, преимущественно скорости Ск, функционирования оборудования ФО 1.1-1.6, свариваемых деталей 1.7-1.9, а также сигналов вероятностного распределения границ диагностируемых состояний определяются фиксацией блоком 11 градиентов Гi (Пi) и их преобразованием оператором Ск. Таким образом по динамике движения градиентно-экстремального сигнала Ui реперных областей свариваемых деталей и оборудования диагностируют аномальные характеристики, преимущественно скорость движения.
По обнаруженным вначале по U износу неисправностям узлов оборудования и токоподводов, а также экстраполяционному прогнозу их по плоскостному распределению градиенно-экстремальных сигналов Ui при наличии локальных пороговых аномалий визируемых областей контроля определяют места износа, неисправности сварочного оборудования. Кроме того, по градиентным уровням Ui перпендикулярно стыку свариваемых деталей вдоль трубы контролируют требуемую симметрию нагрева, определяют осадку, геометрические дефекты, в том числе тарельчатость, гофр, прогнозируют уровень проплавления, определяют уровни адаптивного управления им.
По функциям Ф2-Ф5 обнаружения дефектов геометрии ДГ в зонах Z3, Z4 по детали 1.7 определяется фиксируемым блоком 11 сигналом Гi (Пi) операторов К, ИТ, Р, Ор, НД. Преимущество в обнаружении дефектов ДГ у использования контроля Ui величины и симметрии тепловых распределений Г(П). А также у пироэлектрического позиционно- чувствительного преобразования с учетом знака sign Г(x,y), sign П(x,y).
По функциям Ф2-Ф5 область дефектов несплошности структуры ДС в зонах Z1-Z4 свариваемых деталей 1.7-1.9 и шва 1.10 определяется фиксируемым блоком 11 сигналом Гi (Пi) и соответствующим конкретным дефектам оператором Св, К, Ц, У, ИТ, Р, Ор, Ск, НД, Be. При этом по градиентным пороговым превышениям Ui вдоль стыка контролируют возможность появления дефектов структуры.
В обнаружении дефектов ДС используются локальные приращения Г(x,y), П(x, y). При этом в отличии на плоскости менее изменчивых по термоотклику вариаций твердости рассмотренный градиентно-экстремальный термоотклик дефектов ДС более изменчив и обычно требует для распознавания различные оценки геометрии, взаимного положения, движения и вероятности, блоки 28-31, представленные операторами на фиг. 5 и алгоритмом А1 фиг. 6.
В ТД СОТ для оценки твердости контролируемая кривая остывания Г(t) сравнивается с записанными в память блока 11 кривыми Гэ(t) эталонных твердостей. По совпадению с одной из них оценивается контролируемая твердость, с наименьшей погрешностью для низкотермоэлектропроводных сплавов. Приближенная оценка твердости деталей 1.7(31), 1.8(32) при визировании зон Z1, Z2 в градиентной области остывания (с помощью излучателя 9 или после прогрева током сварки) позволяет при оперативно контролируемых изменениях твердости в 1,5-2 раза существенно влиять на качество соединения. Контролируемая после сварки твердость характеризует достигнутое качество и может быть использована для обеспечения качественной сварки следующего сварного соединения. 9.
Оператор K(x, z, t) с визированием Z1-Z4 помогает определить форму краев, а по моменту совпадения с эталонной формой края - угол ориентации, что дает возможность, например, адаптивно управлять движением механизмов при сварке конструкции. Главное, с помощью оператора К можно оценить форму дефекта, остроту трещины, форму, износ относительно базового уровня. При этом основные преобразования производятся через блок 4 с управлением от блока 11 фильтра 6, где формируется вращаемая эталонная конфигурация, а затем через фильтры 7 и термодатчик 8 в блоке 11, формирующем результат сравнения.
Операторы Р(x, y, t), O(x, y, z, t) обеспечивают распознавание края и контроль трещин и скелетов скоплений дефектов. При визировании зон 31-34 оператор О подобно рассмотренному определяется преобразованиями по основной цепи 4, 11, 6, 7, 8, 11. Таким образом реализуемые геометрические оценки позволяют диагностировать износ, аномальные состояния, совершенствовать управление движением.
Диагностируемые режимы состояния оборудования, электродов и сварочного процесса, определение полей дефектов и оценки твердости для амплитудных оценок с помощью градиентов Г осуществляется посредством пассивного визирования (Z1-Z4, Zi). Основное преобразование сигналов осуществляется по цепи 4, 6-8, 11. Оператор Г (с дублирующим действием оператора П) при визировании для реперных точек (или сводящихся к ним площадей) с известной исправностью позволяет, например, с помощью дифференциальной пирочувствительности в течение цикла определять отклонение режимов давления, электрического питания.
После визирования Z1 оператор Г позволяет в процессе нагрева оценивать по +Г(t) износ электродов (по перегреву для соответствующих видов свариваемых материалов). При этом эффективность обнаружения износа определяет экономию электроэнергии, увеличение производительности с уменьшением перегрева, трещин, раковин, улучшением качества с меньшей вероятностью непровара.
Вероятностный анализ дефектов и границ диагностических состояний предназначен для оптимизации управления качеством. Статистическая обработка информации о дефектах для увеличения циклической прочности важна еще и тем, что даже допустимые дефекты являются концентраторами напряжения, т.е. уменьшают усталостную прочность.
Таким образом, достигнутый технический результат состоит в том, что существенно повышается надежность и расширяются функциональные возможности диагностирования в реальном времени ведения контактной сварки при СОТ за счет следующего.
При настройке, самодиагностике и работе формируют термовоздействия, основное и вспомогательное (через отверстие зеркального объектива), излучением на объекты 01-08, что позволяет: существенно снизить оптико-электронные статические, динамические погрешности; обеспечить необходимые функции Ф1-Ф5 и большой спектр преобразований ТД СОТ на основе термосенсорных оценок.
Спектральным контролем на базе частотной селекции ИИ оценивают уровень и возможность дефектов по распознаваемым загрязнениям поверхностей деталей.
Градиентно-экстремальным преобразованием временных и пространственных изменений амплитуд исходных сигналов с высокой помехоустойчивостью обеспечивают все термосенсорные преобразования с минимальным влиянием изменений теплоотдачи и теплофизических характеристик.
Световодная, точечная организации пассивного и активного получения исходной информации из различный зон впереди, по центру и позади сварного соединения, а также областей визирования контролируемых поверхностей оборудования обеспечивает расширенный спектр преобразований ТД качества сварки.
Совместное использование формируемых термовоздействий спектральных градиентно-экстремальных преобразований и рационального оптоэлектронного визирования ИИ выбранных информативных зон обеспечивает следующие основные термосенсорные сценки диагностирования (в свою очередь определяемые и определяющие прогноз, контроль и адаптивное управление).
По суммарным оценкам: текущий нагрев информативных зон оборудования, деталей, сварного соединения и осадку ребра в процессе сварки, динамический износ контактов токоподвода к деталям и информативных зон оборудования, появление аномальных вибраций деталей, сварного соединения и оборудования. Причем по нагреву деталей прогнозируют, а сварного соединения контролируют, диагностируют состояния непровара, нормы, перегрева.
По точечным оценкам нагрева контролируют: скорость движения узлов оборудования, изменение направления траектории движения ленты.
С помощью интегрирующей оценки времени в пределах выбранной в зависимости от технологии (материалы, толщины, скорость сварки) зоны остывания диагностируют уровень достигнутых размеров.
По точечным оценкам остывания: путем контроля совпадения текущей термоградиентной кривой с одной из кривых эталонных твердостей оценивают твердость деталей или сварного соединения; снижением экстремума - острые кромки пояска на детали от вдавливания электрода; дефекты поверхностей в глубине деталей и сварного соединения.
Для распознавания объекта, в том числе дефектов, по проквантованым и бинарно преобразованным Иi(1,0), Иi(0,1), формируются геометрические оценки: центра, скелетов, траекторий, конфигураций, расстояния между ними, местоположения, разветвленности узлов и замкнутости протяженных траекторий, изменения их направлений, ориентации, объема, площади, протяженности, скорости, направления движения объектов, статистической оценки их совокупности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ИНДУКЦИОННОЙ ПАЙКИ | 1998 |
|
RU2132262C1 |
| СПОСОБ ДИАГНОСТИКИ КОНТАКТНОЙ СВАРКИ | 1998 |
|
RU2133179C1 |
| СПОСОБ ДИАГНОСТИКИ ФОРМООБРАЗОВАНИЯ ПРИ СВАРКЕ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127177C1 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2144217C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА КАЧЕСТВОМ СВАРКИ ПЛАВЛЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2113327C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ И УПРАВЛЕНИЯ КАЧЕСТВОМ ЛАЗЕРНОЙ СВАРКИ | 2004 |
|
RU2258589C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ЭЛЕКТРОННЫХ ПЛАТ | 1991 |
|
RU2033599C1 |
| СПОСОБ КОНТРОЛЯ ОБЪЕКТОВ ПО ТЕПЛОВОМУ ИЗЛУЧЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044287C1 |
| Устройство для регистрации подвижных объектов в зависимости от скорости движения | 1975 |
|
SU550669A1 |
| Устройство для моделирования и оценки статистических параметров | 1983 |
|
SU1173425A1 |


Изобретение относится к области изготовления оребренных труб путем крепления к ним ребер из полос методом высокочастотной сварки. В основу изобретения поставлена задача усовершенствования способа диагностики контактного оребрения, в котором для различных условий применения при высоких требованиях к чувствительности и надежности реализуют более полный набор функций контроля и диагностики. Изобретение обеспечивает расширенные возможности автоматических настройки и самодиагностики, компенсационного амплитудного слежения с управлением рефлекторной оптической и электронной составляющими чувствительности, спектрального фильтрационного контроля структуры поверхности деталей, пространственно-амплитудных, градиентно-экстремальных оценок нагрева, осадки, состояния поверхности, вибрации, скорости, уровня проплавления, дефектов геометрии соответственно деталей, сварного соединения и шва, оценок состояния функционирования сварочного оборудования, а также обнаружения недопустимых дефектов несплошности, перегрева, нормы, непровара, корреляционного термограммного контроля твердости. При этом представляют пространственно-амплитудные (экстремумы, градиенты), пространственно-геометрические (центральные области, площади, объемы, расстояния, связность, разветвленность) и статистические (математическое ожидание, дисперсия, среднеквадратическое отклонение или центр, площадь, средний радиус совокупности условно-точечных объектов) информативные данные обнаружения и распознавания характеристик формообразования сварочного процесса и функционирования обеспечивающего сварку оборудования. 7 ил., 1 табл.
Способ диагностики контактного оребрения, включающий оптическое формирование суммарного потока инфракрасного излучения определенной зоны визирования теплового следа нагрева свариваемых деталей, трубы и оребряющей ленты, преобразование излучения в электрический сигнал, сравнение его с заданным пороговым уровнем, отличающийся тем, что формируют термовоздействия инфракрасным излучением на объекты диагностирования, частотно фильтруют инфракрасное излучение и по нему определяют состояние поверхности, загрязнение деталей и сварного соединения, электрические преобразования осуществляют термодатчиком с точечной термочувствительной поверхностью восприятия тепловых сигналов с формированием из них электрического сигнала Ui, где i - номер точечного элемента, накапливают временные, пространственные изменения амплитуд исходных сигналов и плоскостно их размывают, преобразуют в градиентно-экстремальные сигналы путем моделирования дифференциального уравнения теплопроводности, учитывают влияние колебаний напряжения электрической питающей сети на диагностируемые градиентно-экстремальные сигналы, по суммарному градиентно-экстремальному электрическому сигналу UΣ областей с термочувствительных элементов датчика при включении тока определяют наличие сварочного процесса, контролируют подходы к завариваемым стыкам, к окончанию одной из свариваемых деталей, обнаруживают износ, неисправность узлов оборудования и токоподводов, экстраполяционно прогнозируют их, определяют амплитуду и частоту вибраций свариваемых деталей и соединения, узлов сварочного оборудования, оценивают возможность и контролируют достижение перегрева, нормы, непровара сварного соединения, интегрированием по заданному, полученному экспериментально для данной технологии времени остывания сварного соединения определяют непровар, норму, перегрев, по динамике движения градиентно-экстремального сигнала Ui реперных областей свариваемых деталей и оборудования диагностируют аномальные характеристики, преимущественно скорость движения, по плоскостному распределению градиентно-экстремальных сигналов Ui при наличии локальных пороговых аномалий визируемых областей контроля определяют места износа, неисправности сварочного оборудования, по градиентным уровням перпендикулярно стыку свариваемых деталей вдоль трубы контролируют требуемую симметрию нагрева, определяют осадку, геометрические дефекты, в том числе тарельчатость, гофр, прогнозируют уровень проплавления, определяют уровни адаптивного управления им, по градиентным пороговым превышениям вдоль стыка контролируют возможность появления дефектов структуры, совпадением термоградиентных кривых остывания одного из эталонных по твердости и контролируемого участка детали или сварного соединения оценивают твердость, квантуют и бинарно преобразуют с получением позитивного Ui (1,0) или негативного Ui (0,1) контрастов градиентно-экстремальные сигналы диагностируемых объектов, преимущественно визируемых областей дефектов несплошности, локальным перегревом в процессе охлаждения или изменением типа контраста в процессах нагрева и охлаждения или охлаждения с переходом от негативного Ui (0,1) к позитивному Ui (1,0) контрасту распределения градиентно-экстремальных сигналов обнаруживают поверхностные, внутренние дефекты несплошности деталей и сварного соединения, по распределению позитивного контраста Ui (1,0) определяют геометрические центры, траектории скелетов, местоположение, разветвленность узлов протяженных траекторий, изменение направления траектории, площадь, объем, протяженность, конфигурацию, ориентацию, скорость, направление движения, статистические оценки распределения объектов, по распределению негативного контраста Ui (0,1) определяют замкнутость траекторий, конфигураций объектов, расстояния между ними.
| SU, 837675, 15.06.81 | |||
| FR, 2399299, 16.04.79 | |||
| DE, 4039292, 11.06.92 | |||
| GB, 2095590, 06.10.82. |
