Изобретение относится к области автоматизированных рабочих мест (АРМ) операторов (О) мобильных пунктов управления (МПУ) автоматизированных систем управления (АСУ) подвижными объектами и может быть использовано при создании новых и модернизации существующих МПУ АСУ.
Известно АРМ [1], содержащее системный блок (СБ) с модулем центрального процессора (МЦП), модулем контроллеров ввода/вывода (МКВВ), дополнительными функциональными модулями (ДФМ) для включения АРМ и вычислительные сети, источником электропитания (ИЭП), модулем вентиляторов, накопителем на жестком магнитном диске (НЖМД) и накопителем на гибких магнитных дисках (НГМД), клавиатуру (К), манипулятор графической информации (МГИ) типа "мышь" или "трекболл", принтер (П) и видеомонитор (В) с цветным экраном, выполненный на электроннолучевой трубке, причем СБ, К, МГИ, П и В выполнены в виде отдельных блоков, механически не связанных между собой, МЦП, МКВВ и ДФМ связаны между собой системной шиной, а К, П, МГИ и В связаны с СБ электрически. Недостатком этого АРМ являются сравнительно большие габаритные размеры и масса, не позволяющие использовать его в носимом варианте.
Известно также носимое АРМ [2], которое содержит вычислительный блок (ВБ), состоящий из процессора (П), устройства оперативной памяти (УОП), устройства дисковой памяти в виде накопителя на жестком магнитном диске (НЖМД), одного жидкокристаллического дисплея (ЖКД), сенсорного экрана (СЭ), установленного перед ЖКД, пера для активизации СЭ и автономного источника электропитания (АИЭ), факультативные средства (ФС), состоящие из устройства расширения памяти (УРП), внешнего накопителя на гибком магнитном диске (НГМД) и клавиатуры (К), прикладные средства сопряжения (ПСС), состоящие из факс/модема, адаптера Ethernet, адаптера беспроводной локальной сети, модуля К-МОП памяти, флэш-памяти, платы PC дисковой памяти, адаптера платы PC GPS (Системы Глобального Позиционирования), адаптера звуковой платы PC и камеры с адаптером платы PC, а также порты и гнезда PCMCIA для подключения ФС и ПСС, причем П, УОП, НЖМД и АИЭ установлены внутри корпуса ВБ, ЖКД, СЭ, гнезда PCMCIA и порты установлены на наружной поверхности корпуса ВБ, ФС, перо и ПСС расположены вне корпуса ВБ, СЭ установлен перед ЖКД, УОП, НЖМД, АИЭ, ЖКД, СЭ, гнезда PCMCIA и порты связаны электрически с П, а ФС и ПСС связаны электрически с соответствующими портами и гнездами PCMCIA. Недостатками этого АРМ является, во-первых, то, что на одном дисплее невозможно одновременно и с высоким качеством отображать оператору АРМ большой объем разнообразной информации, которой он должен пользоваться в процессе работы АСУ. Во-вторых, с течением времени существенно снижается надежность работы АРМ из-за возможного нарушения многочисленных контактов в гнездах PCMCIA и портах, которые необходимо каждый раз при подготовке АРМ к работе соединять и по окончании работы АРМ разъединять, а также из-за того, что при транспортировке АРМ возможно механическое повреждение СЭ и ЖКД, установленных на наружной поверхности ВБ АРМ.
Прототипом заявляемого изобретения следует считать носимое АРМ [2], общими признаками которого с заявляемым изобретением является то, что он содержит ВБ, состоящий из П, УОП, НЖМД, СЭ, ЖКД, АИЭ и пера, ФС, состоящие из УРП, К и НГМД, а также ПСС, состоящие из факс/модема, флэш-памяти, адаптера Ethernet, адаптера беспроводной локальной сети, модуля К-МОП памяти, платы PC дисковой памяти, адаптера платы PC GPS, адаптера звуковой платы PC и камеры с адаптером платы PC, а также гнезда PCMCIA и порты для подключения ФС и ПСС, причем П, УОП, НЖМД и АИЭ установлены внутри корпуса ВБ, гнезда PCMCIA и порты установлены на наружной поверхности корпуса ВБ, перо расположено вне корпуса ВБ, СЭ установлен перед ЖКД, гнезда PCMCIA, порты, УОП, НЖМД, АИЭ, ЖКД и СЭ связаны электрически с П, а ФС и ПСС связаны электрически с соответствующими портами и гнездами PCMCIA.
Кроме того, ВБ прототипа содержит один ЖКД, СЭ с ЖКД установлены на наружной поверхности корпуса ВБ, а все ПСС и ФС расположены вне корпуса ВБ.
Недостатками прототипа является, во-первых, то, что на одном дисплее невозможно одновременно и с высоким качеством отображать оператору АРМ большой объем разнообразной информации, которой он должен пользоваться в процессе работы АСУ. Во-вторых, со временем существенно снижается надежность работы АРМ из-за возможного нарушения контактов в гнездах PCMCIA и многочисленных портах, которые необходимо каждый раз при подготовке АРМ к работе соединять и по окончании работы АРМ разъединять. В существовании первого из этих недостатков убеждает рассмотрение, например, процесса функционирования АРМ мобильного пункта управления АСУ движением автомобильного транспорта в некотором регионе при возникновении дорожно-транспортного происшествия (ДТП) на некотором участке этого региона. Для принятия правильного решения по ликвидации последствий ДТП оператор должно постоянно иметь в своем распоряжении следующую информацию: а) телевизионную информацию с места ДТП; б) общую обстановку дорожного движения в регионе на фоне карты автомобильных дорог региона; в) метеорологическую обстановку в регионе и в районе ДТП; г) местоположение мобильных патрульных постов ГАИ и спасательных отрядов в регионе; д) справочную информацию о характеристиках сил и средств спасательных отрядов; е) рекомендации по действиям оператора в условиях ДТП. При наличии в составе АРМ одного ЖКД одновременное отображение оператору этой информации возможно при многооконном и многослойном режимах работы ЖКД. При многооконном режиме площадь экрана ЖКД разбивается на несколько окон и в каждое окно помещается соответствующая информация из указанных выше групп а)...е). Площадь каждого окна существенно меньше площади всего экрана ЖКД. Поэтому разрешающая способность, а следовательно, и качество отображения информации в каждом из окон существенно ниже по сравнению с отображением информации каждой из рассмотренных групп на площади всего экрана ЖКД. При многослойном режиме информация каждой из групп а)...е) последовательно отображается на всей площади экрана ЖКД, однако в этом случае не обеспечивается одновременный вывод информации всех групп оператору АРТМ. Таким образом, в прототипе невозможно одновременно с высоким качеством отображать оператору АРМ большой объем разнообразной информации, которой он должен пользоваться в процессе работы АСУ.
Второй из указанных недостатков прототипа объясняется тем, что за время эксплуатации АСУ приходится многократно производить соединение многочисленных гнезд PCMCIA и портов ВБ для подключения к нему ФС и ПСС при подготовке АРМ к работе, а также производить отсоединение этих гнезд и портов для отключения ФС и ПСС от ВБ по окончанию работы АРМ. С увеличением количества этих многократных соединений и отсоединений возрастает вероятность механического повреждения штырьков гнезд PCMCIA и портов, причем эта вероятность увеличивается с ростом числа этих штырьков, которое, в свою очередь, возрастает с увеличением количества подключаемых ФС и ПСС, расположенных вне корпуса ВБ. При механическом повреждении штырьков портов и гнезд PCMCIA возможно нарушение электрического контакта в соединяемых ими электрических цепях, что снижает надежность работы АРМ. Кроме того, снижение надежности АРМ происходит из-за возможного механического повреждения СЭ и ЖКД при транспортировке АРМ, поскольку они установлены на наружной поверхности ВБ так, что составляют часть этой поверхности и в рабочем состоянии АРМ и при его транспортировке.
Целью изобретения является устранение указанных недостатков прототипа, а именно обеспечение одновременного и с высоким качеством отображения оператору носимого АРМ большого объема разнообразной информации, которой он должен пользоваться в процессе работы АСУ, и повышение надежности АРМ.
Поставленная цель достигается следующим. Во-первых, системный блок (СБ) носимого АРМ дополнительно содержит не менее одного дополнительного жидкокристаллического дисплея (ДЖКД), каждый из которых электрически связан с процессором СБ. В результате по сравнению с прототипом существенно увеличивается площадь экранов, на которых одновременно и с высоким качеством можно отображать информацию оператору АРМ. Нижний ДЖКД установлен на внутренней поверхности передней крышки СБ, которая установлена с возможностью вращения относительно корпуса СБ вокруг горизонтальной оси и при транспортировке закрывает нижний ДЖКД и основной ЖКД, установленный на переднем торце корпуса СБ. Остальные ДЖКД установлены на верхней и боковых наружных поверхностях корпуса СБ так, что в рабочем состоянии СБ их можно установить в положение, обеспечивающее удобство работы оператора с ними, а при транспортировке АРМ их перемещают внутрь корпуса СБ. Такая установка ДЖКД обеспечивает защиту СЭ и всех ЖКД от механических повреждений при транспортировке АРМ, что повышает его надежность по сравнению с прототипом. Во-вторых, клавиатуру, приемник GPS, позволяющий с высокой точностью определять координаты местоположения АРМ, радиостанцию, позволяющую включить АРМ в беспроводную локальную сеть, и НГМД устанавливают в корпусе СБ. В результате этого они постоянно электрически связаны с процессором СБ, что повышает надежность АРМ по сравнению с прототипом.
Таким образом, предлагается автоматизированное рабочее место оператора автоматизированной системы управления, которое содержит процессор, устройство оперативной памяти, накопитель на жестком магнитном диске, накопитель на гибком магнитном диске, жидкокристаллический дисплей, сенсорный экран, блок питания, автономный источник питания, клавиатуру, перо, факультативные средства, состоящие из устройств расширения памяти, прикладные средства расширения, состоящие из факс/модема, флеш-памяти, адаптера Ethernet, модуля К-МОП памяти, платы PC дисковой памяти, адаптера звуковой платы PC и камеры с адаптером платы PC, а также электроразъем для подключения внешнего источника электропитания, гнезда PCMCIA и порты для подключения факультативных средств и прикладных средств сопряжения, причем процессор, устройство оперативной памяти, накопитель на жестком магнитном диске, накопитель на гибком магнитном диске, жидкокристаллический дисплей, сенсорный экран, блок питания, автономный источник питания, электроразъем, гнезда PCMCIA и порты объединены в системный блок, процессор, устройство оперативной памяти, накопитель на жестком магнитном диске, накопитель на гибком магнитном диске, блок питания и автономный источник питания установлены внутри системного блока, жидкокристаллический дисплей, электроразъем, гнезда PCMCIA и порты установлены на поверхностности системного блока, сенсорный экран установлен перед жидкокристаллическим дисплеем, а перо, факультативные средства и прикладные средства сопряжения расположены вне пределов системного блока, соответствующие выходы процессора связаны электрически с входами устройства оперативной памяти, накопителя на жестком магнитном диске, накопителя на гибком магнитном диске, жидкокристаллического дисплея и с соответствующими контактами гнезд PCMCIA и портов, соответствующие входы процессора электрически связаны с выходами устройства оперативной памяти, накопителя на жестком магнитном диске, накопителя на гибком магнитном диске, сенсорного экрана, блока питания и с соответствующими контактами гнезд PCMCIA и портов, один вход блока питания электрически связан с выходом автономного источника питания, другой вход блока питания электрически связан с электроразъемом, а соответствующие контакты гнезд PCMCIA и портов электрически связаны с соответствующими факультативными средствами и прикладными средствами сопряжения. При этом системный блок дополнительно содержит клавиатуру, навигационный приемник системы спутниковой навигации с антенной, радиостанцию с антенной и не менее одного дополнительного жидкокристаллического дисплея, причем навигационный приемник и радиостанция установлены внутри системного блока, антенна навигационного приемника и антенна радиостанции установлены на поверхности системного блока, клавиатура установлена внутри передней крышки системного блока с возможностью поступательного перемещения относительно передней крышки вдоль наружной поверхности этой крышки, которая установлена с возможностью вращения относительно корпуса системного блока, один дополнительный жидкокристаллический дисплей установлен на внутренней поверхности передней крышки системного блока, остальные дополнительные жидкокристаллические дисплеи установлены на боковых и верхней поверхностях системного блока с возможность вращения этих дисплеев относительно этих поверхностей и с возможностью поступательного перемещения осей вращения этих дисплеев относительно этих поверхностей, а также с возможностью фиксации рабочего и транспортировочного положения этих дисплеев, выход клавиатуры электрически связан с соответствующим входом процессора, выход навигационного приемника электрически связан с соответствующим входом процессора, выход радиостанции электрически связан с соответствующим входом процессора, а соответствующие выходы процессора электрически связаны с входом радиостанции и соответствующими входами дополнительных жидкокристаллических дисплеев.
Сущность изобретения поясняется общим видом СБ АРМ в рабочем состоянии, который показан на фиг. 1, где обозначено: 1 - фиксатор положения передней крышки; 2 - передняя крышка; 3 - механизм поворота передней крышки; 4 - панель; 5 - нижний дополнительный ЖКД; 6 - корпус АРМ; 7 - фиксатор положения панели 8; 8 - панель клавиатуры; 9 - клавиатура; 10 - панель правого дополнительного ЖКД; 11 - задние фиксаторы транспортировочного положения панели 10; 12 - передние фиксаторы транспортировочного положения панели 10; 13 - правый дополнительный ЖКД; 14 - фиксаторы рабочего положения панели 10; 15 - панель левого дополнительного ЖКД; 16 - левый дополнительный ЖКД; 17 - передние фиксаторы транспортировочного положения панели 19; 18 - задние фиксаторы транспортирвоочного положения панели 19; 19 - панель верхнего дополнительного ЖКД; 20 - верхний дополнительный ЖКД; 21 - фиксаторы рабочего положения панели 19; 22 - электроразъем для подключения внешнего источника электропитания; 23 - блок электропитания; 24 - фиксаторы закрытого положения крышки 25; 25 - крышка; 26 - гнезда PCMCIA и порты для подключения ФС и ПСС; 27 - зажим; 28 - перо; 29 - панель основного ЖКД; 30 - основной ЖКД; 31 - сенсорный экран; 32, 33 - переключатели для подключения электропитания к составным частям АРМ; 34 - автономный источник электропитания; 35 - фиксатор транспортировочного положения крышки 36; 37 - НГМД; 38 - антенна навигационного приемника; 39 - навигационный приемник системы спутниковой навигации; 40 - процессор; 41 - антенна радиостанции; 42 - радиостанция; 43- функциональные клавиши на периферии основного ЖКД; 44 - НЖМД; 45 - УОП; 46 - гибкая линия проводной связи от процессора к правому дополнительному ЖКД; 47 - гибкая линия проводной связи от процессора к верхнему дополнительному ЖКД; 48 - ручка для переноски СБ АРМ.
Устроен СБ АРМ следующим образом. Он содержит корпус 6, накопитель на гибком магнитном диске (НГМД) 37, процессор (П) 40, накопитель на жестком магнитном диске (НЖМД) 44, устройство оперативной памяти (УОП) 45, навигационный приемник (НП) 39 с антенной 38, радиостанцию (P/C) 42 с антенной 41, основной жидкокристаллический дисплей (ОЖКД) 30, сенсорный экран (СЭ) 31, нижний дополнительный ЖКД (НДЖКТ) 5, правый дополнительный ЖКД 13 (ПДЖКД), левый дополнительный ЖКД (ЛДЖКД) 16, верхний дополнительный ЖКД (ВДЖКД) 20, механизм 3 поворота передней крышки корпуса, клавиатуру (К) 9, блок электропитания (БЭП) 23, автономный источник электропитания (АИЭ) 34, электроразъем (ЭР) 22 для подключения внешнего источника электропитания, перо 28, порты и гнезда PCMCIA 26 для подключения факультативных средств (ФС) и прикладных средств сопряжения (ПСС). П 40, НГМД 37, НЖМД 44, УОП 45, НП 39, P/C 42, БЭП 34 и АИЭ 23 установлены внутри корпуса 6 СБ. ЭР 22, гнезда и порты 26, антенны 38 и 41, установлены на наружной поверхности корпуса 6, причем гнезда и поты 26 при транспортировке АРМ закрыты крышкой 25, положение которой фиксируется фиксаторами 24. ОЖКД 30 установлен на панели 29, которая установлена на переднем торце корпуса 6, закрытом при транспортировке АРМ передней крышкой 2. НДЖКД 5 установлен на панели 4, которая установлена на внутренней поверхности передней крышки 2 под углом 15...20 градусов к наружной поверхности передней крышки 2. ПДКЖД 13 установлен на внутренней поверхности панели 10, которая установлена на поверхности правого борта корпуса 6 с возможностью вращения вокруг вертикальной оси, имеющей возможность перемещения в горизонтальном направлении вдоль поверхности правого борта корпуса 6. При транспортировке АРМ панель 10 укладывается так, что ее внутренняя поверхность обращена внутрь корпуса 6, а наружная поверхность панели 40 становится частью наружной поверхности правого борта корпуса 6 и фиксируется в этом положении фиксаторами 11 и 12. Рабочее положение панели 10, показанное на фиг. 1, фиксируется фиксаторами 14. ЛДЖКД 16 установлен на внутренней поверхности панели 15, которая установлена на поверхности левого борта корпуса 6 так же, как панель 10 установлен на правом борту корпуса 6. ВДЖКД 20 установлен на внутренней поверхности панели 19, которая установлена на верхней поверхности корпуса 6 с возможностью вращения вокруг горизонтальной оси, которая имеет возможность перемещения в горизонтальном направлении вдоль верхней поверхности корпуса 6. При транспортировке АРМ панель 19 укладывается так, что ее внутренняя поверхность обращена внутрь корпуса 6, а наружная поверхность панели 19 становится частью верхней поверхности корпуса 6, и фиксируется в этом положении фиксаторами 17 и 18. Рабочее положение панели 19, показанное на фиг. 1, фиксируется фиксаторами 21. Клавиатура 9 установлена на панели 8, которая установлена в зазоре между передней крышкой 2 и панелью 4 с возможностью поступательного перемещения вдоль поверхности передней крышки 2, причем выдвинутое и вдвинутое положения панели 8 фиксируются фиксатором 7. Передняя крышка 2 установлена на корпусе 6 с возможностью вращения ее относительно корпуса вокруг горизонтальной оси на 90 градусов. При транспортировке АРМ передняя крышка 2 закрывает передний торец корпуса 6, а в рабочем положении передней крышки 2, показанном на фиг. 1, она отклонена на 90 градусов вниз с помощью механизма поворота 3. Оба указанные крайние положения передней крышки 2 фиксируются фиксатором 1. СЭ 31 установлен перед ОЖКД 30. Перо 28 установлено в углублении панели 29 в зажиме 27 с возможностью извлечения его из зажима 27. переключатели 32 установлены на панели 29, а переключатели 33 установлены на панели 4. Ручка 48 установлена на верхней поверхности корпуса 6. При транспортировке АРМ НГМД 44 закрыт крышкой 36, положение которой фиксируется фиксатором 35. Соответствующие входы процессора 40 электрически связаны с выходом НГМД 37, выходом НЖМД 44, выходом УОП 45, выходом НП 39, выходом P/C 42, выходом БЭП 23, выходом СЭ 31, выходом К 9, гнездами PCMCIA и портами 26. Соответствующие выходы П 40 электрически связаны с входом ОЖКД 30, входом НДЖКД 5, входом ПДЖКД 13, входом ЛДЖКД 16, входом ВДЖКД 20, входом УОП 45, входом НЖМД 44 и входом P/C 42. Соответствующие входы БЭП 23 электрически связаны с выходом АИЭ 34, ЭР 22, переключателями 32 и 33. Вход НП 39 электрически связан с антенной 38. Антенна 41 электрически связана с P/C 42.
Работает АРМ в нескольких режимах. Первым является режим "Подготовка", при котором АРМ переводится из транспортировочного состояния в рабочее состояние. При этом:
- открывают фиксатор 1 передней крышки 2 и с помощью механизма поворота 3 поворачивают переднюю крышку 2 с установленной на ней панелью 4 нижнего ЖКД 5 относительно корпуса 6 СБ на 90 градусов вниз, закрепляя ее в этом положении закрытием фиксатора 1;
- открывают фиксатор 7 панели с установленной на ней клавиатурой 9, выдвигают панель 8 из передней крышки 2 и закрепляют панель 8 в этом положении закрытием фиксатора 7;
- открывают передние 10 и задние 11 фиксаторы транспортировочного положения панели 12 с установленным на ней правым ЖКД 13, переводят ее в рабочее положение, поворачивая панель 12 вправо вокруг вертикальной оси и передвигая ее вперед относительно корпуса 6, и закрепляют панель 12 с ЖКД 13 в рабочем положении с помощью фиксаторов 14;
- подобным образом переводят в рабочее положение панель 15 с установленным на ней левым ЖКД 16;
- открывают передние 17 и задние 18 фиксаторы транспортировочного положения панели 19 с установленным на ней верхним ЖКД 20, переводят эту панель с ЖКД 20 в рабочее положение, поворачивая панель 19 вокруг горизонтальной оси вверх и передвигая ее вперед относительно корпуса 6, и закрепляя панель 19 с ЖКД 20 в рабочем положении с помощью фиксаторов 21;
- при наличии источника электропитания, внешнего по отношению к АРМ, подключают этот источник электропитания к ЭР 22;
- при необходимости подключения ФС и ПСС открывают фиксаторы 24 крышки 25, откидывают эту крышку и подключают потребные ФС и ПСС к соответствующим гнездам PCMCIA и портам 26;
- разжимают разъем 27 и вынимают перо 28 из углубления в панели 29;
- включают подвод электропитания к составным частям АРМ с помощью переключателей 32, расположенных на панели 29, и переключателей 33, расположенных на панели 4, причем если к ЭР 22 подключен внешний источник электропитания, то БЭП 23 получает электроэнергию от этого внешнего источника, а АИЭ 34 работает в режиме подзарядки. Если ЭР 22 отключен, то БЭП 23 получает электроэнергию от АИЭ 34;
- открывают фиксатор 35, откидывают крышку 36 и вводят информацию в НГМД 37, которая с выхода НГМД 37 поступает на соответствующий вход П 40.
Вторым режимом работы АРМ является режим "Работа". На этом режиме:
- радиосигналы от навигационных спутников Земли принимаются антенной 38, обрабатываются навигационным приемником 39, с выхода которого содержащаяся в них информация о координатах местоположения АРМ поступает на соответствующий вход П 40;
- радиосигналы от других абонентов, находящихся в беспроводной локальной сети, принимаются антенной 41, обрабатываются радиостанцией 42, с выхода которой содержащаяся в них информация поступает на соответствующий вход П 40;
- электрические сигналы, которые оператор формирует с помощью К 9, с выхода К 9 поступают на соответствующий вход П 40;
- электрические сигналы, которые оператор формирует с помощью пера 28, дотрагиваясь им до соответствующих точек поверхности СЭ 31, в частности тех, под которыми на периферии ЖКД 30 изображены соответствующие функциональные клавиши 43, с выхода СЭ поступают на соответствующий вход П 40;
- П 40 обрабатывает информацию, поступающую к нему от НГМД 36, радиостанции 41, НП 39, К 9 и СЭ 31, используя при этом информацию, хранящуюся в НЖМД 44 и УОП 45;
- с выхода П 40 электрические сигналы, несущие информацию, которую необходимо отображать оператору, поступают на основной ЖКД 30 и дополнительные ЖКД 5, 13, 16, 20, используя гибкие проводные линии связи, как например, линия 46 для ЖКД 13 и линия 47 для ЖКД 20;
- с выхода П 40 электрические сигналы, несущие информацию, которую необходимо передавать другим абонентам беспроводной локальной сети, поступают на вход радиостанции 42;
- в процессе работы П 40 обменивается информацией с НЖМД 44 и УОП 45 по внутренним проводным линиям связи.
Третьим режимом является "Свертывание", в процессе которого АРМ переводится из рабочего состояния в транспортировочное состояние. При этом:
- отключают электропитание от составных частей АРМ с помощью переключателей 32 и 33;
- закрывают крышку 36 и фиксируют ее закрытое положение фиксатором 35;
- вставляют перо 28 в углубление панели 29 и фиксируют перо 28 зажимом 27;
- отключают использовавшиеся ФС и ПСС от соответствующих гнезд и портов 26, закрывают крышку 25 и фиксируют ее закрытое положение фиксаторами 24;
- отключают внешний источник электропитания от ЭР 22; - отсоединяют фиксаторы 21 от панели 19, устанавливают панель 19 с верхним ЖКД 20 в транспортировочное положение, сдвигая ее назад и поворачивая вокруг горизонтальной оси относительно корпуса 6, и закрепляют панель 19 в транспортировочном положении фиксаторами 17 и 18;
- отсоединяют фиксаторы 14 от панели 10, устанавливают панель 10 с правым ЖКД 13 в транспортировочное положение, сдвигая ее назад и поворачивая вокруг вертикальной оси относительно корпуса 6, и закрепляют панель 10 в транспортировочном положении фиксаторами 11 и 12;
- подобным образом переводят в транспортировочное положение панель 15 с левым ЖКД 16 и закрепляют ее в этом положении;
- открывают фиксатор 7, вдвигают панель 8 в переднюю крышку 2 и фиксируют ее в этом положении закрытием фиксатора 7;
- открывают фиксатор 1, с помощью механизма поворота 3 поворачивают переднюю крышку 2 относительно корпуса 6 вверх на 90 градусов и фиксируют переднюю крышку 2 в этом положении закрытием фиксатора 1.
В транспортировочном положении СБ можно переносить с помощью ручки 48.
Увеличение объема информации, которая одновременно отображается оператору на предлагаемом АРМ, по сравнению с прототипом при том же качестве отображения этой информации, которое обеспечивает прототип можно оценить следующим образом. Допустим, что при заданном качестве отображения объем Qип информации, которая отображается оператору АРМ - прототипа, пропорционален значению Sдп площади ЖКД, установленного в АРМ - прототипе,
Qип = Kи • Sдп, (1)
где Kи - коэффициент пропорциональности.
Пусть в предлагаемом АРМ значения Sо площади основного ЖКД и Sнд площади нижнего дополнительного ЖКД одинаковы и равны значению Sдп
Sо = Sнд = Sдп. (2)
Допустим также, что значение Sпд площади правого, Sлд площади левого и Sвд площади верхнего дополнительных ЖКД одинаковы и пропорциональны Sдп
Sпо = Sлд = Sвд = Ks • Sдп, (3)
где Ks - коэффициент пропорциональности.
С учетом принятого выше допущения (1), объем Qи информации, которая отображается оператору на предлагаемом АРМ с тем же качеством, которое обеспечивается в прототипе при однооконном режиме работы его ЖКД, определяется выражением
Qи = Kи(Sо+Sнд+Sпд+Sлд+Sвд). (4)
Подставив в (4) выражения (2) и (3), получим
Qи = Kи(2+3 Ks) Sдп. (5)
Разделив (5) на (1), найдем коэффициент Куи увеличения объема информации, отображаемой оператору на предлагаемом АРМ, по сравнению с АРМ - прототипом
Kуи = Qи/Qип= 2 + 3 • Ks. (6)
Таким образом, при одинаково высоком качестве отображения информации предлагаемый АРМ позволяет отобразить оператору объем информации, который более чем в 2 раза превышает объем информации, отображаемый в АРМ - прототипе. В частности, при
Ks = 0,5
на основании (6) получим
Kуи = 3,5.
Повышение надежности предлагаемого АРМ по сравнению с прототипом можно оценить следующим образом. В качестве показателя надежности используем вероятность Pот отказа в работе АРМ в результате нарушения электрического контакта в контактных парах гнезд PCMCIA и портов, с помощью которых в АРМ подсоединяются ПСС и ФС к СБ, вызванного механическими повреждениями в этих контактных парах, которое может появиться при их многократном соединении и разъединении. Очевидно, что чем меньше значение Pот, тем выше надежность.
Допустим, что значение вероятности P1 нарушения электрического контакта в одной контактной паре пропорционально количеству Ncp ее соединений и разъединений
P1 = KcpNcp, (7)
где Kcp - коэффициент пропорциональности.
Тогда значение вероятности P1, безотказной работы этой контактной пары определяется выражением
P1б = 1 = P1. (8)
Обозначим n - общее количество контактных пар в портах и гнездах PCMIA, с помощью которых в АРМ подсоединяются ФС и ПСС к СБ. Вероятность Pб безотказной работы всех этих контактных пар при условии взаимной независимости их отказов определяется выражением
Pб = (1 - P1), (9)
а вероятность Pо хотя бы одного отказа в рассматриваемых контактных парах равна
Pо = 1 - Pб. (10)
Подставив выражения (1) и (9) в выражение (10), разложим полученное выражение в ряд Тейлора, ограничившись первыми двумя членами этого разложения. В результате получим
Pо = Kcp•Ncp•N. (11)
Обозначим Nп - количество контактных пар в гнездах PCMCIA и портах прототипа, посредством которых в нем к ВБ подсоединяются:
- УРП, К и НГМД, составляющие ФС;
- факс/модем, флэш-память, адаптер Ethеrnet, модуль К-МОП памяти, адаптер беспроводной локальной сети (радиостанции), плата PC дисковой памяти, адаптер платы PC GPS, адаптер звуковой платы PC и камера с адаптером платы PC, составляющие ПСС.
Тогда вероятность Pоп хотя бы одного отказа в рассматриваемых контактных парах прототипа равна
Pоп = Kcp•Ncp•Nп. (12)
Обозначим Na - количество контактных пар в гнездах PCMCIA и портах предлагаемого АРМ. Тогда при том же числе Ncp их соединений и разъединений значение вероятности Pa хотя бы одного отказа в рассматриваемых контактных парах в предлагаемом АРМ равна
Pa = Kcp•Ncp•Na. (13)
Разделив (13) на (12), получим
Pa = Na/Nп Pоп. (14)
Таким образом, соотношение между Pa и Pоп определяется соотношением между Na и Nоп. Очевидно, что
Na < Nоп,
так как в предлагаемом АРМ клавиатура (К), НГМД, навигационный приемник (GPS) и радиостанция установлены внутри корпуса АРМ и постоянно электрически соединены с процессором АРМ. Поэтому
Na/Nоп < 1
и, согласно (14)
Pa < Pоп,
что и определяет повышение надежности предлагаемого АРМ по сравнению с прототипом.
Кроме того, надежность предлагаемого АРМ по сравнению с прототипом повышается за счет уменьшения вероятности механического повреждения жидкокристаллических дисплеев и сенсорного экрана при транспортировке предлагаемого АРМ, так как при этом его СЭ и все ЖКД расположены внутри корпуса системного блока АРМ, а в прототипе СЭ и расположенный под ним ЖКД являются частью наружной поверхности вычислительного блока АРМ.
Источники информации
"Багет" семейство ЭВМ для специализированных применений, каталог изделий Конструкторского бюро "КОРУНД-М", г. Москва, 109117, а/я 10, 1995 г., стр. 3.
2. "HARBODY", рекламный проспект фирмы Texas Mikrosystems, Inc., 1995 г. , P.O.Box 42963, Houston, TX 77242-2963.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ ПУСКЕ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2243481C1 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
Изобретение относится к области автоматизированных рабочих мест операторов мобильных пунктов управления автоматизированных систем управления подвижными объектами. Технический результат заключается в обеспечении оператору одновременного и с высоким качеством отображения большого объема информации, которым он должен пользоваться в процессе работы, и в повышении надежности работы системы. Этот технический результат достигается тем, что в системный блок дополнительно установлены клавиатуры, антенна и навигационный приемник системы спутниковой навигации, радиостанция и не менее одного дополнительного жидкокристаллического дисплея. 1 ил.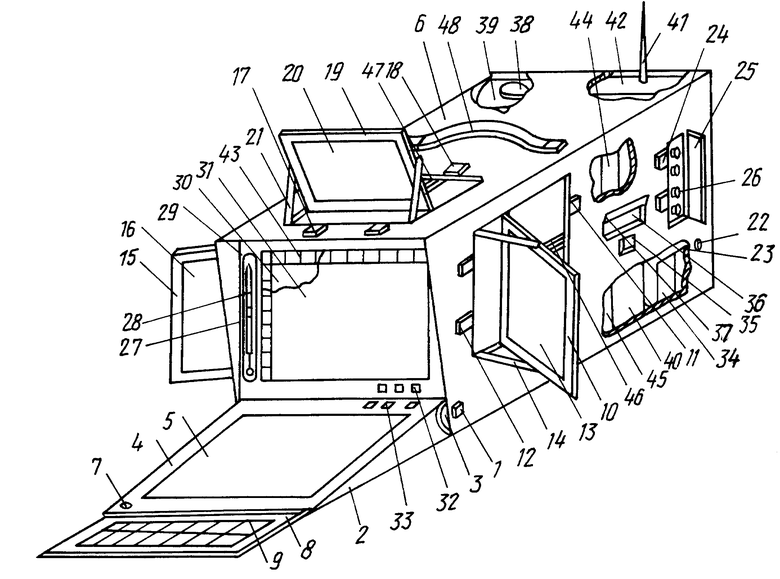
Автоматизированное рабочее место оператора автоматизированной системы управления, которое содержит процессор, устройство оперативной памяти, накопитель на жестком магнитном диске, накопитель на гибком магнитном диске, жидкокристаллический дисплей, сенсорный экран, блок питания, автономный источник питания, клавиатуру, перо, факультативные средства, состоящие из устройств расширения памяти, прикладные средства сопряжения, состоящие из факс/модема, флэш-памяти, адаптера Ethernet, модуля К-МОП памяти, платы РС дисковой памяти, адаптера звуковой платы РС и камеры с адаптером платы РС, а также электроразъем для подключения внешнего источника электропитания, гнезда PCMCIA и порты для подключения факультативных средств и прикладных средств сопряжения, причем процессор, устройство оперативной памяти, накопитель на жестком магнитном диске, накопитель на гибком магнитном диске, жидкокристаллический дисплей, сенсорный экран, блок питания, автономный источник питания, электроразъем, гнезда PCMCIA и порты объединены в системный блок, процессор, устройство оперативной памяти, накопитель на жестком магнитном диске, накопитель на гибком магнитном диске, блок питания и автономный источник питания установлены внутри системного блока, жидкокристаллический дисплей, электроразъем, гнезда PCMCIA и порты установлены на поверхности системного блока, сенсорный экран установлен перед жидкокристаллическим дисплеем, а перо, факультативные средства и прикладные средства сопряжения расположены вне пределов системного блока, соответствующие выходы процессора связаны электрически с входами устройства оперативной памяти, накопителя на жестком магнитном диске, накопителя на гибком магнитном диске, жидкокристаллического дисплея и с соответствующими контактами гнезд PCMCIA и портов, соответствующие входы процессора электрически связаны с выходами устройства оперативной памяти, накопителя на жестком магнитном диске, накопителя на гибком магнитном диске, сенсорного экрана, блока питания и с соответствующими контактами гнезд PCMCIA и портов, один вход блока питания электрически связан с выходом автономного источника питания, другой вход блока питания электрически связан с электроразъемом, а соответствующие контакты гнезд PCMCIA и портов электрически связаны с соответствующими факультативными средствами и прикладными средствами сопряжения, отличающееся тем, что системный блок дополнительно содержит клавиатуру, навигационный приемник системы спутниковой навигации с антенной, радиостанцию с антенной и не менее одного дополнительного жидкокристаллического дисплея, причем навигационный приемник и радиостанция установлены внутри системного блока, антенна навигационного приемника и антенна радиостанции установлены на поверхности системного блока, клавиатура установлена внутри передней крышки системного блока с возможностью поступательного перемещения относительно передней крышки вдоль наружной поверхности этой крышки, которая установлена с возможностью вращения относительно корпуса системного блока, один дополнительный жидкокристаллический дисплей установлен на внутренней поверхности передней крышки системного блока, остальные дополнительные жидкокристаллические дисплеи установлены на боковых и верхней поверхностях системного блока с возможностью вращения этих дисплеев относительно этих поверхностей и с возможностью поступательного перемещения осей вращения этих дисплеев относительно этих поверхностей, а также с возможностью фиксации рабочего и транспортировочного положений этих дисплеев, выход клавиатуры электрически связан с соответствующим входом процессора, выход навигационного приемника электрически связан с соответствующим входом процессора, выход радиостанции электрически связан с соответствующим входом процессора, а соответствующие выходы процессора электрически связаны с входом радиостанции и соответствующими входами дополнительных жидкокристаллических дисплеев.
| "HARDBODY", Рекламный проспект фирмы Texas Mikrosystems, Inc., Houston, 1995 | |||
| "Багет"-семейство ЭВМ для специализированных применений | |||
| Каталог изделий Конструкторского бюро "КОРУНД-М".-М., 1995, с.3 | |||
| Поляков К.П., Конструирование приборов и устройств радиоэлектронной аппаратуры.-М.: Радио и связь, 1982, с.109-132, рис.5.3 и 6.1.в. |

