Изобретение относится к области радиолокации и радионавигации и может быть использовано в радиолокационных системах для обнаружения и сопровождения подвижных целей.
Известен пеленгатор для измерения углового положения цели, содержащий две одинаковые антенны с коммутируемыми диаграммами направленности, два одноканальных приемных устройства, два угловых дискриминатора, общее для двух каналов устройство формирования команд, выходы которого подключены к входам управления коммутации диаграмм направленности антенн и к входам синхронизации угловых дискриминаторов и блоки коррекции данных, введенные в оба канала пеленгатора (см. патент РФ №2134430 C1, G 01 S 3/16, 5/00, 1999).
Известный пеленгатор обеспечивает уменьшение влияния флюктуации амплитуды принимаемого сигнала на точность определения углового положения.
Однако как все известные пеленгаторы с многоканальными приемными устройствами оно чувствительно к неидентичностям приемных каналов по амплитудно-фазовым характеристикам, что снижает точность измерения угловой координаты.
Наиболее близким аналогом к предлагаемому пеленгатору является пеленгатор в одной плоскости, содержащий две антенны с идентичными диаграммами направленности и ориентированные в пространстве параллельно друг Другу, суммарно-разностный преобразователь, первый вход которого подключен к выходу первой антенны, два приемных устройства с общим гетеродином, входы которых соединены с выходами суммарно-разностного преобразователя, и угловой дискриминатор (см. А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. М.: Радио и связь, 1984, с.71).
Однако и этот пеленгатор, как и другие известные пеленгаторы с многоканальными приемными устройствами, чувствителен к неидентичностям приемных каналов по амплитудно-фазовым характеристикам, что снижает точность измерения угловой координаты. Причем основной вклад в ошибку измерения координаты вносят погрешности устройства после суммарно-разностного преобразователя, поскольку известно, что пассивная часть пеленгатора, в которую входят антенны, например волноводные тракты и суммарно-разностный преобразователь, по существу мало чувствительны к амплитудным ошибкам, а в правильно рассчитанном устройстве фазовые ошибки в этой части пеленгатора могут поддерживаться на достаточно низком уровне.
Задача изобретения состояла в снижении чувствительности пеленгатора к неидентичностям приемных каналов по амплитудно-фазовым характеристикам.
Указанная задача решается тем, что предложен пеленгатор в одной плоскости, содержащий две антенны с идентичными диаграммами направленности и ориентированными в пространстве параллельно друг другу, суммарно-разностный преобразователь, первый вход которого подключен к выходу первой антенны, два приемных устройства с общим гетеродином, входы которых соединены с выходами суммарно-разностного преобразователя, и угловой дискриминатор, в который согласно изобретению введены блок отключения сигнала и блок коррекции данных, причем один из входов блока отключения сигнала соединен с выходом второй антенны, второй вход - к первому выходу блока коррекции данных, выход блока отключения сигнала соединен со вторым входом суммарно-разностного преобразователя, входы блока коррекции данных подключены к выходам приемных устройств, а два других выхода блока коррекции данных, не связанных с блоком отключения сигнала, подключены к входам углового дискриминатора.
В предпочтительном варианте осуществления пеленгатора блок отключения сигнала выполнен в виде регулируемого аттенюатора с электрическим управлением, включающим трехдецибельный мост и два пин-диода, подключенных к мосту, причем вход трех децибельного моста соединен с выходом второй антенны, выход моста соединен со вторым входом суммарно-разностного преобразователя, а входы пин-диодов соединены с первым выходом блока коррекции данных.
Еще одним отличием пеленгатора является то, что блок коррекции данных выполнен в виде микроконтроллера, включающего центральный процессор, и подключенные к внутрисистемной магистрали постоянное запоминающее устройство, последовательные интерфейсы, параллельные интерфейсы, системный таймер и систему прерывания, причем выходы последовательных интерфейсов соединены с входами углового дискриминатора, входы параллельных интерфейсов соединены с выходами приемных устройств, а выход одного из параллельных интерфейсов соединен со вторым входом блока отключения сигнала.
В предлагаемом пеленгаторе для повышения точности измерения угловых координат предложено использовать свойство пассивного суммарно-разностного преобразователя образовывать на своих выходах одинаковые по амплитуде и известные по фазе сигналы при подаче сигнала только на один из его входов, и использовать эти сигналы как контрольные сигналы для выравнивания электрических длин приемных устройств после суммарно-разностного преобразователя. Этот прием приводит к снижению чувствительности пеленгатора к неидентичностям приемных устройств по амплитудно-фазовым характеристикам и, как следствие, повышает точность измерения угловой координаты.
Сущность изобретения поясняется чертежами.
На фиг.1 изображена функциональная схема пеленгатора.
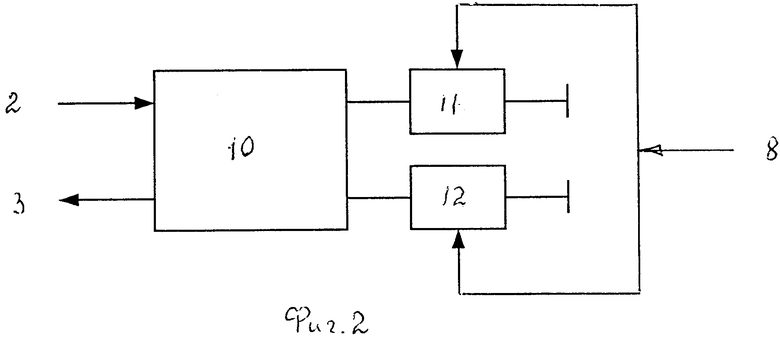
На фиг.2 представлена функциональная схема блока отключения сигнала.
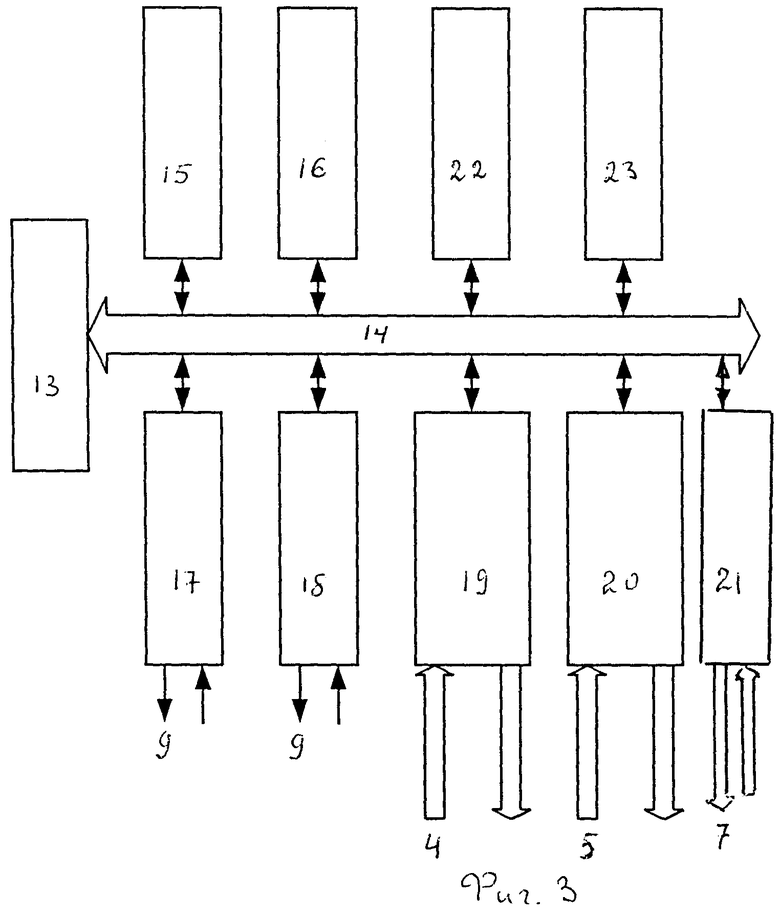
На фиг.3 изображена функциональная схема блока коррекции данных.
Предлагаемый пеленгатор (фиг.1) содержит две антенны 1 и 2 с идентичными диаграммами направленности, суммарно-разностный преобразователь 3, первый вход которого подключен к выходу первой антенны 1, два приемных устройства 4 и 5 с общим гетеродином 6, входы которых соединены с выходами суммарно-разностного преобразователя 3, блок 7 отключения сигнала, первый вход которого соединен с выходом второй антенны 2, а выход подсоединен ко второму входу суммарно-разностного преобразователя 3, блок 8 коррекции данных, входы которого соединены с выходами приемных устройств 4 и 5, а один из выходов соединен со вторым входом блока 7 отключения сигнала, и угловой дискриминатор 9, входы которого соединены с выходами блока 8 коррекции данных, не связанными с блоком 7 отключения сигнала. Антенны 1 и 2 могут быть выполнены в виде двух одинаковых рупорных антенн, ориентированных в пространстве параллельно друг другу. Суммарно-разностный преобразователь 3 может быть выполнен в виде двойного Т-образного моста (см. справочник по радиолокации, том 3, Радиолокационные устройства и системы. М.: Советское радио, 1979, с.137).
Блок 7 отключения сигнала в предпочтительном варианте осуществления изобретения выполнен в виде регулируемого аттенюатора с электрическим управлением (см. фиг.2), в который входят трехдецибельный мост 10 и два пин-диода 11 и 12, подключенных к мосту 10. Вход моста 10 соединен с выходом второй антенны 2, а выход моста соединен со вторым входом суммарно-разностного преобразователя 8. Входы пин-диодов 11 и 12 соединены с первым выходом блока 8 коррекции данных. Мощность, поступающая на вход блока 7 отключения сигнала, делится поровну между плечами моста 10, к которым подключены пин-диоды 11 и 12. При этом падающая мощность либо поглощается диодами при подаче на них напряжения от блока 8 коррекции данных, либо отражается от них при отсутствии напряжения. В первом случае на выходе блока 7, соединенном с суммарно-разностным преобразователем 3, присутствует сигнал, а во втором - отсутствует.
Блок 8 коррекции данных может быть выполнен в виде микроконтроллера (см. фиг.3), в который входят центральный процессор 13 и подключенные к внутрисистемной магистрали 14 постоянное запоминающее устройство 15, оперативное запоминающее устройство 16, последовательные интерфейсы 17 и 18 и параллельные интерфейсы 19, 20 и 21, а также системный таймер 22 и система 23 прерывания. Системный таймер 22 совместно с системой 23 прерывания обеспечивают поддержку режима реального времени. Внутрисистемная магистраль 14 организует многоплатные расширения микроконтроллера с помощью специальных и системных модулей, таких как модуль ввода-вывода или системная память (не показаны).
Два параллельных интерфейса 19 и 20 обеспечивают прием цифровой информации от двух приемных устройств 4 и 5 (см. фиг.1) с цифровым выходом, а третий параллельный интерфейс 21 обеспечивает управление блоком 7 отключения сигнала. Два последовательных интерфейса 17 и 18 обеспечивают передачу обработанных данных в угловой дискриминатор 9. Постоянное запоминающее устройство (ПЗУ) 15 предназначено для хранения рабочих программ. В нем записаны программы приема данных с выходов приемных устройств 4 и 5, обработки этих данных согласно математическим выражениям, приведенным ниже при описании работы устройства, передачи данных в угловой дискриминатор 9 и управления блоком 7 отключения сигнала. Центральный процессор 13 совместно со всеми составляющими микроконтроллера обеспечивает исполнение записанных данных в постоянном запоминающем устройстве 15.
Угловой дискриминатор 9 выполняет функцию определения угловой координаты цели путем сравнения поступающих данных из блока 8 коррекции данных и может быть также реализован на основе микроконтроллера, как и блок 8, с двумя входами и общим выходом. На входы углового дискриминатора 9 поступают данные с выходов блока 8 коррекции данных. В постоянном запоминающем устройстве (не показано) углового дискриминатора 9 (микроконтроллера) записаны программы приема данных, обработки данных согласно математическим выражениям, приведенным ниже при описании работы устройства, и передачи данных потребителю угловых координат.
Пеленгатор работает следующим образом.
Пусть согласно программе, записанной в ПЗУ блока 8 коррекции данных, блок 7 отключения сигнала отключает сигнал с выхода второй антенны 2. Тогда на выходах приемных устройств 4 и 5 формируются сигналы с комплексными амплитудами
X1=A·K1
Х2=А·К2
где А - комплексная амплитуда сигнала на выходе первой антенны 1 в момент измерения;
K1, K2 - комплексные коэффициенты передачи приемных устройств 4 и 5.
Эти комплексные амплитуды запоминаются в блоке 8 коррекции данных. При отключенном от второй антенны 2 сигнале в соответствии с программой работ, записанной в ПЗУ блока 8, данные с выхода блока 8 коррекции данных не передаются на входы углового дискриминатора 9 и соответственно дискриминатор 9 не производит измерение координат.
Когда согласно программе работ, записанной в ПЗУ блока 8 коррекции данных, блок 7 подключает выход антенны 2 к входу суммарно-разностного преобразователя 3, на выходах приемных устройств 4 и 5 формируются сигналы с комплексными амплитудами
 , где
, где
u - направляющий косинус, соответствующий положению объекта;
d - расстояние между антеннами;
λ - длина волны;
В - комплексный коэффициент, пропорциональный амплитуде сигнала от объекта в момент измерения.
Эти комплексные амплитуды (Y1 и Y2) делятся на запомненные ранее комплексные амплитуды (X1 и Х2) и образуют новые значения, не зависящие от коэффициентов передачи приемных устройств 4 и 5
Величины Z1 и Z2 передаются в угловой дискриминатор 9, в котором производится определение направляющего косинуса (U) по формуле

После проведения всех математических действий оказывается, что 
Значение  не зависит как от амплитуды сигнала от объекта в момент измерения, так и от неидентичности коэффициентов передачи приемных устройств 4 и 5.
не зависит как от амплитуды сигнала от объекта в момент измерения, так и от неидентичности коэффициентов передачи приемных устройств 4 и 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЛЕНГАТОР В ДВУХ ПЛОСКОСТЯХ | 1998 |
|
RU2134430C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СУММАРНО-РАЗНОСТНЫЙ УГЛОВОЙ ДИСКРИМИНАТОР | 1991 |
|
RU2012015C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2015 |
|
RU2606707C1 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ ДЛЯ МОНОИМПУЛЬСНЫХ РАДИОЛОКАТОРОВ | 1994 |
|
RU2087005C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
Изобретение относится к области радиолокации и радионавигации и может быть использовано в радиолокационных системах для обнаружения и сопровождения подвижных целей. Предложен пеленгатор в одной плоскости, содержащий две антенны с идентичными диаграммами направленности, суммарно-разностный преобразователь, первый вход которого соединен с выходом первой антенны, два приемных устройства с общим гетеродином, входы которых соединены с выходами суммарно-разностного преобразователя, и угловой дискриминатор, в который согласно изобретению введены блок отключения сигнала и блок коррекции данных, причем один из входов блока отключения сигнала соединен с выходом второй антенны, второй вход - к первому выходу блока коррекции данных, выход блока отключения сигнала соединен со вторым входом суммарно-разностного преобразователя, входы блока коррекции данных подключены к выходам приемных устройств, а два других выхода блока коррекции данных, не связанных с блоком отключения сигнала, подключены к входам углового дискриминатора. Технический результат изобретения состоит в исключении влияния неидентичности характеристик приемных устройств на точность измерения угловой координаты. 3 ил.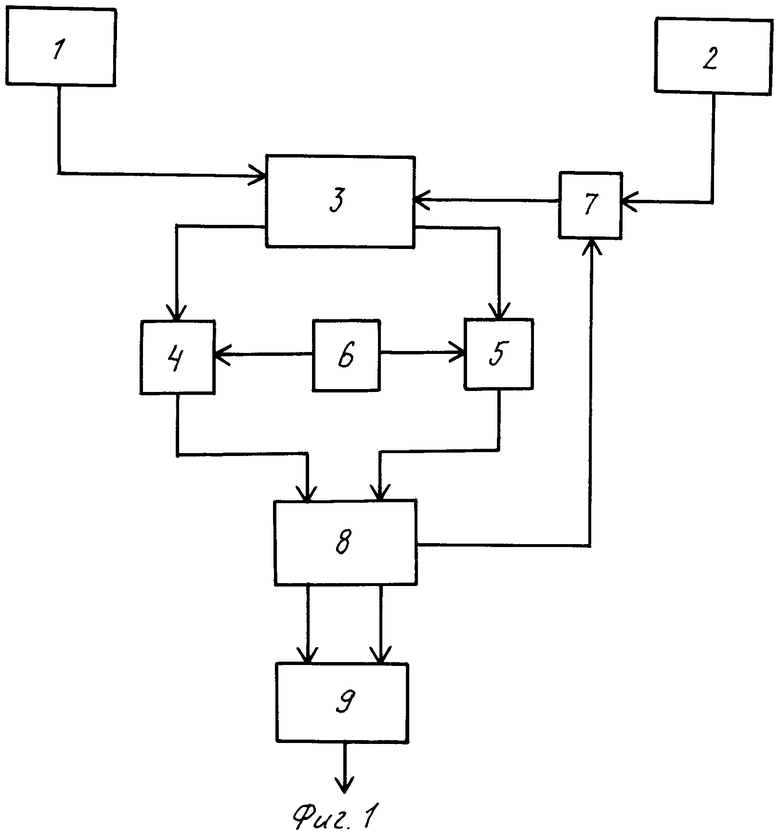
Пеленгатор в одной плоскости, содержащий две антенны с идентичными диаграммами направленности и ориентированными в пространстве параллельно друг другу, суммарно-разностный преобразователь, первый вход которого подключен к выходу первой антенны, два приемных устройства с общим гетеродином, входы которых соединены с выходами суммарно-разностного преобразователя, и угловой дискриминатор, отличающийся тем, что в него введены блок отключения сигнала и блок коррекции данных, причем один из входов блока отключения сигналов соединен с выходом второй антенны, второй вход - к первому выходу блока коррекции данных, выход блока отключения сигнала соединен со вторым входом суммарно-разностного преобразователя, входы блока коррекции данных подключены к выходам приемных устройств, а два других выхода блока коррекции данных подключены ко входам углового дискриминатора.
| ПЕЛЕНГАТОР В ДВУХ ПЛОСКОСТЯХ | 1998 |
|
RU2134430C1 |
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| М.: Радио и связь, 1984, с.71 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| МНОГОКАНАЛЬНЫЙ РАДИОПЕЛЕНГАТОР | 1995 |
|
RU2110809C1 |
| US 4646095, 24.02.1987 | |||
| Объемный насос | 1986 |
|
SU1402711A2 |

