Изобретение относится к средствам обеспечения летных испытаний систем и комплексов бортового оборудования летательных аппаратов (ЛА) и предназначается для исследования характеристик ЛА и их бортового оборудования на всех этапах полета.
Известно устройство «Система формирования сигналов управления полетом летательного аппарата» (патент РФ №2015940 на изобретение от 15.07.1994 г.). Система содержит блоки анализа функциональной и аппаратурной достоверности физических параметров полета, блоки анализа суммарной достоверности параметров полета, дешифраторы, блоки оптимальных оценок состояния датчиков, блоки синхронизации, блоки формирования сигналов управления и задания программы полета, оперативные и долговременные запоминающие устройства, блоки индикации.
Однако указанное устройство не обеспечивает получения высокоточных значений траекторных параметров ЛА и не обеспечивает регистрацию параметров БО ЛА для проведения их послеполетного анализа.
Известно устройство «Комплекс бортовых траекторных измерений» (патент РФ №2116666, 27.07.98 г.), которое на основе измерений приемника спутниковой навигационной системы (СНС) формирует траекторные параметры ЛА в процессе проведения ЛИ. Комплекс содержит приемник СНС, устройство сопряжения, пульт управления и индикации, блок приведения данных к единому времени, вычислитель действительных параметров траектории ЛА. Для повышения точности определения параметров пространственного положения ЛА комплекс во время полета производит комплексную обработку информации приемника СНС и бортовой инерциальной навигационной системы (ИНС). Обработка основана на калмановской фильтрации. Недостатком названного устройства является использование только кодовых измерений СНС и только от навигационных спутников GPS, проведение комплексной обработки информации на основе фильтра Калмана требует больших вычислительных ресурсов, ее результат зависит от принятой априорной модели инструментальных погрешностей ИНС.
Известно «Устройство обеспечения летных испытаний перспективных комплексов бортового оборудования, построенных на принципах интегрированной модульной авионики» (патент РФ на полезную модель №112565 от 27.09.2011 г.), взятое за прототип, которое производит регистрацию информации бортового оборудования в различных цифровых форматах и в процессе проведения ЛИ формирует траекторные параметры ЛА на основе кодовых и фазовых измерений навигационных спутников GPS и ГЛОНАСС.
Недостатком данного устройства является относительно низкая частота получения траекторных параметров от приемника СНС, равная 1 Гц, что затрудняет исследования особенностей полета ЛА на маневренных участках полета, когда происходят затенение антенны СНС фюзеляжем самолета и сокращение количества видимых навигационных спутников. Кроме того, не производится экспресс-анализ параметров БО и выполнения полетного задания во время летного эксперимента на борту ЛА.
Технический результат, на достижение которого направлено данное изобретение, состоит в сокращении сроков проведения летных испытаний, материальных затрат на проведение летных испытаний за счет автоматизации процессов сбора информации, формирования траекторных параметров ЛА, послеполетной обработки материалов летных испытаний.
Существенные признаки
Для достижения этого технического результата в многофункциональный комплекс бортовых траекторных измерений, включающий наземную и бортовую части комплекса, содержащий в бортовой части - бортовой блок комплекса бортовых траекторных измерений (ББ КБТИ), связанный через встроенные в него адаптеры ввода информации с выходами бортового оборудования летательного аппарата (БО ЛА), в состав которого входят инерциальная навигационная система (ИНС); приемник спутниковой навигационной системы (СНС) с антенной, установленной на фюзеляже ЛА; встроенный кварцевый генератор; дисплей блока контроля и управления (БКУ); формируемую во время полета базу данных КБТИ с параметрами бортовых систем (БД КБТИ); а в наземной части - наземную базовую контрольно-корректирующую станцию (ККС) с известными геодезическими координатами, в которой последовательно связаны антенна и приемник СНС из состава ККС, персональную электронную вычислительную машину (ПЭВМ) из состава ККС, накапливающую базу данных с информацией приемника СНС (БД ККС), в систему послеполетной обработки материалов летных испытаний для исследования характеристик бортового оборудования включены экспертная система автоматизированного анализа погрешностей и определение характеристик бортового оборудования, выполненная в составе машины логического вывода со связанными с ней базами данных программ полетов, электронных карт местности, базы данных по траекторным и погодным ограничениям, базы знаний рабочей памяти процессора, блоком объяснений, блоком приобретения знаний, выходы последних двух блоков связаны с системой отображения информации (СОИ), в состав бортового блока КБТИ введены: многочастотный приемник СНС, выполненный с возможностью обновления своей выходной информации с частотой 10 Гц; блок синхронизации параметров бортовых систем между собой и с параметрами траекторного движения ЛА по сигналам кварцевого генератора и приемника СНС, формирования шкалы и текущих значений Гринвичского времени; блок экспресс-анализа текущей информации систем бортового оборудования. При этом выход приемника СНС соединен с входами блока синхронизации, с входами БД КБТИ и блока экспресс-анализа, выход кварцевого генератора также связан с входом блока синхронизации, адаптеры цифровой информации ввода информации БО ЛА соединены с входами БД КБТИ и через блок экспресс-анализа с входом БКУ. Выходы блока синхронизации соединены с входом БД КБТИ. В систему послеполетной обработки и вычисления погрешностей навигационных параметров бортовых систем ЛА включен блок комплексной обработки информации (КОИ), основанной на методе наименьших квадратов и предназначенной для формирования значений траекторных параметров ЛА на протяжении всего полета от взлета до посадки, включая участки динамического маневрирования ЛА. Данные из БД КБТИ и БД ККС подаются на вход блока обработки данных СНС, выход которого вместе с выходом БД КБТИ соединен с входом блока КОИ, выходы КОИ и БД КБТИ подключены к блоку формирования погрешностей, а его выход и выход БД КБТИ подключены к входам блока базы знаний экспертной системы автоматизированного анализа погрешностей и определения характеристик бортового оборудования.
На наземной базовой ККС персональная электронная вычислительная машина (ПЭВМ) выполнена с возможностью накапливать базу данных (БД ККС) с информацией приемника СНС с частотой обновления, равной 10 Гц.
Таким образом, комплекс позволяет определять высокоточные параметры траекторного движения ЛА на основе фазовых измерений аппаратуры СНС и комплексной обработки информации СНС и инерциальной навигационной системы; регистрацию выходных параметров бортовых систем в цифровых форматах, используемых бортовым оборудованием; проведение экспресс-анализа во время полета с отображением его результатов на дисплее блока контроля и управления (БКУ); синхронизировать параметры бортовых систем между собой и с параметрами траекторного движения ЛА, а также производить обработку материалов ЛИ.
Изобретение иллюстрируется чертежами, представленными на фиг.1-4
На фиг.1 показано размещение предлагаемого устройства для регистрации информации во время полета.
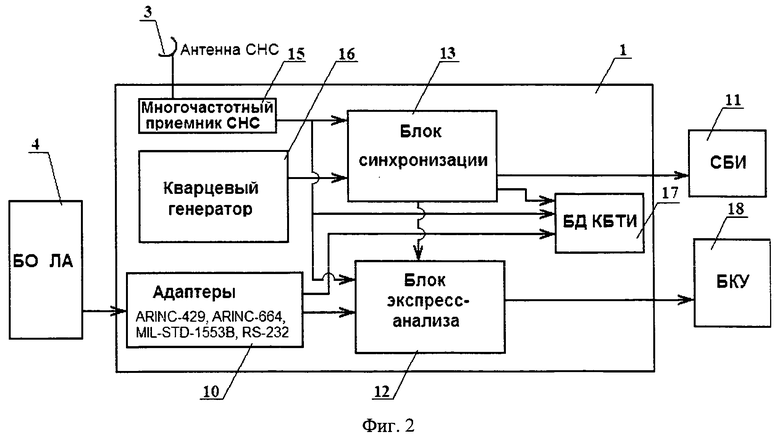
На фиг.2 показано сопряжение вычислителя КБТИ с системами бортового оборудования.
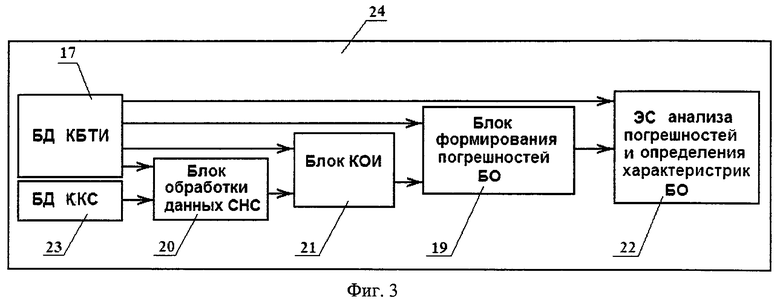
На фиг.3 показана система послеполетной наземной обработки материалов летных испытаний.
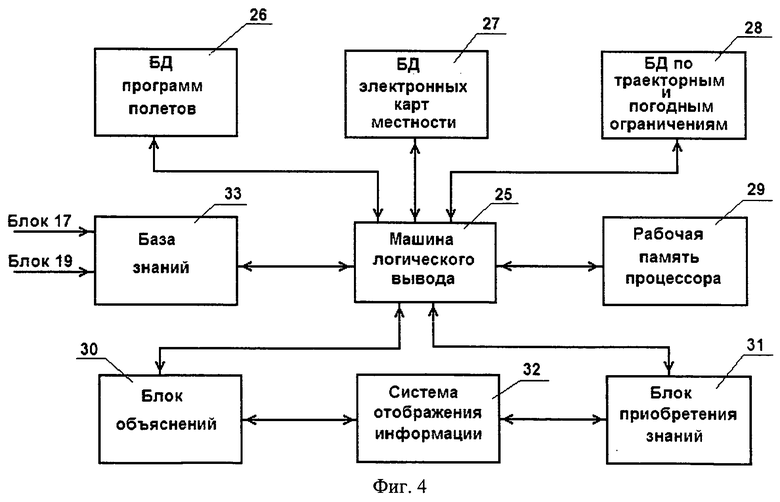
На фиг.4 показано строение блока экспертной системы автоматизированного анализа погрешностей и определения характеристик бортового оборудования.
Комплекс бортовых траекторных измерений предназначен для обеспечения летных испытаний. Многофункциональный КБТИ решает следующие задачи при проведении ЛИ: формирование высокоточных значений траекторных параметров с требуемой частотой; регистрация параметров бортового оборудования; синхронизация параметров траекторного движения ЛА и параметров бортового оборудования, проведение экспресс-анализа во время полета, обработка материалов летных испытаний после окончания летных испытаний. По данным, накопленным в процессе летных испытаний, с помощью КБТИ определяются характеристики систем и комплексов бортового оборудования.
Цифрами на фиг.1÷4 обозначены:
1 - бортовой блок комплекса бортовых траекторных измерений (ББ КБТИ)
2 - летательный аппарат (ЛА)
3 - антенна приемника СНС из состава (ББ КБТИ)
4 - бортовое оборудование летательного аппарата (БО ЛА), в состав которого входит инерциальная навигационная система (ИНС)
5 - группировки навигационных спутников ГЛОНАСС/GPS
6 - наземная базовая контрольно-корректирующая станция (ККС)
7 - многочастотный приемник СНС
8 - антенна приемника СНС из состава ККС
9 - ПЭВМ из состава ККС
10 - адаптеры цифровой информации
11 - система бортовых измерений СБИ
12 - блок экспресс-анализа
13 - блок синхронизации, формирования Гринвичского времени
15 - многочастотный приемник СНС, встроенный в ББ КБТИ
16 - кварцевый генератор
17 - база данных КБТИ (БД КБТИ)
18 - блок контроля и управления (БКУ) с дисплеем
19 - блок формирования погрешностей БО
20 - блок обработки данных СНС, формирование данных дифференциального режима СНС
21 - блок комплексной обработки информации (КОИ)
22 - экспертная система (ЭС) анализа погрешностей и определения характеристик БО
23 - база данных ККС
24 - система наземной послеполетной обработки
25 - машина логического вывода
26 - базы данных программ полетов
27 - электронные карты местности
28 - базы данных по траекторным и погодным ограничениям
29 - рабочая память процессора
30 - блок объяснений
31 - блок приобретения знаний
32 - система отображения информации (СОИ)
33 - база знаний
Комплекс обеспечения летных испытаний систем и комплексов бортового оборудования (фиг.1÷4) включает в себя наземную и бортовую части. В бортовой части комплекс содержит (см. фиг.1 и 2): бортовой блок КБТИ 1 (ББ КБТИ), установленный на ЛА 2, связанный через встроенные в него адаптеры ввода информации 10 с выходами бортового оборудования летательного аппарата 4 (БО ЛА), в состав которого входит инерциальная навигационная (ИНС) система; приемник спутниковой навигационной системы (СНС) 15 с антенной 3, установленной на фюзеляже ЛА 2, принимающего кодовые и фазовые сигналы навигационных спутников 5 ГЛОНАСС и GPS (см. фиг.1, 2). Приемник 15 СНС выполнен многочастотным, с возможностью обновления своей выходной информации с частотой 10 Гц. В комплекс встроены: кварцевый генератор 16; дисплей блока контроля и управления 18 (БКУ); формируемая во время полета база данных КБТИ с параметрами бортовых систем 17 (БД КБТИ); блок синхронизации 13 параметров бортовых систем между собой и с параметрами траекторного движения ЛА, обрабатывающий сигналы кварцевого генератора 16 и приемника 15 СНС, формирования шкалы и текущих значений Гринвичского времени; блок экспресс-анализа 12 текущей информации систем бортового оборудования. При этом выход приемника 15 СНС соединен с входами блока синхронизации 13, с входами БД КБТИ 17 и блока экспресс-анализа 12, выход кварцевого генератора 16 также связан с входом блока синхронизации 13, адаптеры 10 цифровой информации ввода информации БО ЛА 4 соединены с входами БД КБТИ 17 и через блок экспресс-анализа 12 с входом БКУ 18. Выходы блока синхронизации 13 соединены с входом БД КБТИ 17 (см. фиг.2).
Наземная часть содержит: базовую контрольно-корректирующую станцию 6 (ККС) с известными геодезическими координатами, в которой последовательно связаны антенна 8 и приемник 7 СНС из состава ККС; персональную электронную вычислительную машину 9 (ПЭВМ) из состава ККС; накапливающую базу данных 23 с информацией приемника СНС (БД ККС) и систему послеполетной обработки материалов летных испытаний 24 для исследования характеристик бортового оборудования (см. фиг.1).
В систему послеполетной обработки и вычисления погрешностей навигационных параметров бортовых систем ЛА 24 включен блок комплексной обработки информации 21, основанной на методе наименьших квадратов и предназначенной для формирования значений траекторных параметров ЛА на протяжении всего полета от взлета до посадки, включая участки динамического маневрирования ЛА. Данные из БД КБТИ 17, БД ККС 23 поступают на вход блока обработки данных СНС 20, выход которого вместе с выходом БД КБТИ 17 соединены с блоком комплексной обработки информации 21 (КОИ), выходы КОИ и БД КБТИ подключены к блоку формирования погрешностей 19, а его выход и выход БД КБТИ - к блоку базы знаний 33 экспертной системы автоматизированного анализа погрешностей и определения характеристик бортового оборудования 22 (см. фиг.3, 4). Экспертная система автоматизированного анализа погрешностей и определения характеристик бортового оборудования 22 выполнена в составе машины логического вывода 25, со связанными с ней базами данных программ полетов 26, электронных карт местности 27, базы данных по траекторным и погодным ограничениям 28, рабочей памяти процессора 29, блоком объяснений 30 по поводу выполнения заданного режима полета, блоком приобретения знаний 31, выходы последних двух блоков связаны с системой отображения информации 32 (СОИ).
Многофункциональный комплекс бортовых траекторных измерений работает следующим образом.
В наземной базовой станция ККС 6 персональная электронная вычислительная машина 9 (ПЭВМ) выполнена с возможностью накапливать базу данных (БД ККС) с информацией приемника 7 СНС с частотой обновления, равной 10 Гц.
В ББ КБТИ 1 от бортового оборудования 4 ЛА поступает информация на адаптеры 10 цифровой информации в форматах ARINC-429, MIL-STD-1553В, ARINC-664, RS-232. После адаптеров информация БО поступает в блок экспресс-анализа 12 и регистрируется в базе данных (БД) КБТИ 17. Получая сигналы навигационных спутников с помощью антенны 3, приемник СНС, встроенный в ББ КБТИ, производит измерения траекторных параметров с частотой 10 Гц и передает информацию в блок экспресс-анализа 12, базу данных КБТИ 17, блок синхронизации 13. На основе сигналов приемника СНС 15 и встроенного кварцевого генератора 16 в блоке синхронизации 13 формируются текущие значения Гринвичского времени, которые вместе с информацией БО ЛА 4 и встроенного приемника СНС 15 регистрируются в БД КБТИ 17. Значения Гринвичского времени передаются в систему бортовых измерений (СБИ) 11, где используются для синхронизации информации различных бортовых систем. Результаты экспресс-анализа передаются в блок контроля и управления (БКУ) 18, выполненном на основе ноутбука, отображаются на дисплее БКУ как в табличном, так и в графическом видах.
БД 17, накопленная в ББ КБТИ 1, вместе с базой данных 23, накопленной в ПЭВМ 9 ККС 6, поступает в систему наземной послеполетной обработки 24 материалов летных испытаний. В блоке обработки данных СНС 20 вычисляются данные дифференциального режима СНС, по информации БД КБТИ 17 и дифференциального режима СНС на выходе из блока обработки данных СНС 20 в блоке комплексной обработки информации (КОИ) 21 вычисляются высокоточные значения траекторных параметров ЛА от взлета до посадки с требуемой частотой, результаты блока КОИ используются в блоке 19 при формировании погрешностей навигационных параметров систем бортового оборудования 4, полученные погрешности анализируются и служат основой при определении характеристик бортового оборудования в экспертной системе 22. Экспертная система автоматизированного анализа погрешностей и определения характеристик бортового оборудования 22 выполнена в составе машины логического вывода 25, со связанными с ней базами данных программ полетов 26, электронных карт местности 27, базы данных по траекторным и погодным ограничениям 28, базы знаний 33, рабочей памяти процессора 29, блоком объяснений 30 по поводу выполнения заданного режима полета, блоком приобретения знаний 31 по траекторным и погодным ограничениям и программе полета для выполнения заданного режима полета, выходы последних двух блоков связаны с системой отображения информации 32 (СОИ) для оптимального планирования эксперимента (фиг.4).
На время летных испытаний (фиг.1) на борту ЛА 2 с испытываемым комплексом бортового оборудования 4 устанавливается блок КБТИ 1. На аэродроме, где проводятся летные испытания, размещается базовая контрольная станция (ККС КБТИ) 6. Антенна 8 приемника СНС 7 ККС закрепляется в точке с известными геодезическими координатами. Во время испытательных полетов ЛА многочастотный приемник СНС, встроенный в бортовой блок КБТИ, с помощью связанной с ним антенной СНС 3 принимает кодовые и фазовые сигналы навигационных спутников ГЛОНАСС и GPS 5, которые накапливаются в базе данных 17 бортового блока КБТИ 1. Частота регистрации измерений СНС равна 10 Гц. Одновременно производится прием кодовых и фазовых сигналов навигационных спутников ГЛОНАСС и GPS 5 многочастотным приемником СНС 7 на ККС 6, регистрация сигналов СНС осуществляется в ПЭВМ 9 с частотой 10 Гц.
На борту ЛА 2 (фиг.2) информация бортовых систем поступает в ББ КБТИ 1. Адаптеры 10 бортового блока КБТИ 1 в полном объеме принимают информацию в числовых форматах ARINC-429, MIL-STD-1553В, ARINC-664, RS-232. В блоке 12 производится экспресс-анализ текущей информации бортовых систем, вычисляются физические значения всех входящих параметров, производится распаковка служебных слов и слов состояния. Масштабные коэффициенты выбираются из служебного текстового файла с таблицей паспортов параметров.
В блоке экспресс-анализа 12 вычисляются погрешности навигационных параметров бортовых систем. В качестве действительных значений траекторных параметров ЛА выбираются параметры приемника СНС 15, встроенного в ББ КБТИ 1. При вычислении погрешностей в вычислителе производится приведение параметров систем и траекторных параметров ЛА к единому временному фронту. Синхронизация параметров, используемых в экспресс-анализе 12, осуществляется с помощью линейной интерполяции по формуле:

здесь Т - момент Гринвичского времени, к которому приводится значение параметра X; Т1, Т2 - моменты времени, на которые имеются значения параметра X; Т1≤Т<Т2. Результаты экспресс-анализа выдаются по сети Ethernet в БКУ 18. Оператор, находящийся на борту ЛА во время полета, имеет возможность наблюдать на дисплее БКУ за поведением параметров бортовых систем в табличном и графическом видах, их погрешностей, осуществлять контроль за величинами погрешностей, а также контролировать выполнение полетного задания.
Вычисление значений Гринвичского времени в блоке синхронизации 13 осуществляется на основе синхроимпульса приемника СНС 15, который поступает при обновлении каждой секунды, в блоке 13 по информационной пачке приемника СНС производится оцифровка синхроимпульса, значения времени между двумя соседними синхроимпульсами вычисляются по сигналам кварцевого генератора, частота собственных колебаний которого известна и относительно стабильна. Синхронизация параметров, их приведение к единому временному фронту достигаются с помощью линейной интерполяции. Сформированное значение текущего Гринвичского времени ББ КБТИ 1 имеет возможность передать в формате ARINC-429 потребителям, в качестве которых может выступать система бортовых измерений СБИ 11, производящая регистрацию параметров бортовых систем в полном объеме.
Регистрация параметров в базе данных КБТИ производится наборами. Составы наборов определены заранее и заносятся в служебный текстовый файл.
Частота регистрации каждого набора определяется с помощью КБТИ. Она может выбираться либо по появлению определенного события, например приход заданного адреса по определенному каналу, либо с выдерживанием заданного интервала времени между двумя соседними регистрациями набора, т.е. регистрация с фиксированной частотой, либо задаваться оператором с помощью специальной команды, набранной с клавиатуры БКУ 18. Частота регистрации отдельных наборов параметров может увеличиваться при наступлении определенных фаз полета. Например, при выполнении режимов взлета и посадки частота регистрации может автоматически устанавливаться 10 Гц, в то время как на протяжении других участков полета частота регистрации наборов может оставаться равной 1 Гц. Частота регистрации каждого набора определяется пользователем и зависит от конкретной задачи, стоящей перед летными испытаниями. ББ КБТИ представляет собой гибкое средство регистрации параметров бортовых систем, настраиваемое программным путем. Как правило, данных, накопленных в полете в ББ КБТИ 1, 17, достаточно для определения требуемых характеристик систем и комплексов бортового оборудования.
После полета накопленные данные поступают на наземную систему обработки материалов летных испытаний (фиг.3). БД 17 извлекается из ББ КБТИ 1 с помощью БКУ 18 и вместе с БД 23, накопленной на ККС 6, поступает в систему послеполетной обработки 24. В блоке 20 по данным БД КБТИ 17 и БД ККС 23 формируются параметры дифференциального режима СНС по фазовым измерениям с частотой 10 Гц. На динамических участках полета может происходить затенение антенны СНС 3 фюзеляжем ЛА 2, что влечет за собой уменьшение количества видимых навигационных спутников, снижение точности параметров дифференциального режима СНС или их временное отсутствие. Для получения высокоточных значений траекторных параметров на протяжении всего полета, включая участки динамического маневрирования, а также для формирования траекторных параметров с частотой выше 10 Гц применяется комплексная обработка информации (КОИ). С помощью специального программно-математического обеспечения обрабатываются данные дифференциального режима СНС и данные бортовой инерциальной навигационной системы, зарегистрированные с высокой частотой в БД КБТИ17.
Параметры дифференциального режима СНС обладают достаточно высокой точностью на протяжении всего полета. Точностные характеристики параметров ИНС зависят от времени ее непрерывной работы. Со временем погрешности ИНС могут увеличиваться. Изменение погрешности ИНС происходит относительно медленно. В алгоритме КОИ используется метод наименьших квадратов. На достаточно коротком интервале времени длительностью не более 4 минут по имеющейся информации приемника СНС определяются параметры линейной модели погрешности ИНС для каждой из трех составляющей вектора скорости и каждой из трех координат. Построенная модель используется для получения из сигналов ИНС с требуемой частотой навигационных параметров, по точности сравнимых с параметрами приемника СНС. Инерциальная навигационная система имеет в своем составе датчики первичной информации, измеряющие три составляющих линейного ускорения и три составляющих угловой скорости. В ИНС по первичной информации формируются проекции вектора скорости на северное, восточное и вертикальное направления и углы ориентации самолета. В потоке выходных параметров ИНС присутствуют и первичная информация, и параметры, полученные в ИНС расчетным путем по первичной информации. Шум в измерениях и ограниченность разрядной сетки выдаваемых параметров приводят к появлению случайной составляющей погрешности относительно малой интенсивности в значениях скорости ИНС. Наиболее значимый вклад в погрешность скоростных параметров ИНС вносит медленно меняющаяся составляющая с характерным интервалом времени 84,4 минуты (периодом Шулера). На интервале порядка 3-4 минут погрешность скорости ИНС близка к линейной функции времени.
Работа алгоритма КОИ разбита на два этапа. Сначала определяются составляющие вектора скорости на протяжении всего полета, а затем вычисляются значения координат. По каждой из трех составляющих - северной, восточной и вертикальной - работа алгоритма происходит независимо от двух других. Обработка производится последовательно для каждого интервала времени между двумя соседними по времени tk и tk+1 данными приемника СНС. Выбирается интервал ΔТ, содержащий внутри себя интервал (tk, tk+1), и на котором имеется не менее 100 значений параметров приемника СНС. Модель погрешности инерциальной скорости на интервале времени ΔT принимается в виде суммы линейного тренда и «белого» шума
ΔV(t)=C(t-tk)+D+ξ(t).
Параметры линейного тренда С и D находятся с помощью метода наименьших квадратов. Чтобы получить систему линейных уравнений для С и D, рассматривается вспомогательная функция

В сумме учитываются слагаемые, относящиеся ко всем моментам времени ti, попавшим в интервал от ΔT. Весовые коэффициенты αi зависят от удаленности точки ti от середины интервала ΔT:

Система линейных уравнений для С и D образуется путем приравнивания к нулю частных производных функции G по параметрам С и D


После нахождения из полученной системы линейных уравнений параметров С и D линейный тренд вычитается из значений скорости ИНС на интервале (tk, tk+1). Для произвольного момента времени из интервала (tk, tk+1) значение скорости вычисляется с помощью линейной интерполяции скорректированных данных ИНС.
Получение каждой из трех координат производится независимо от других координат последовательно для каждого интервала времени (tk, tk+1). Далее приводится алгоритм получения координаты X, две другие координаты вычисляются аналогично. Считается, что значение X(tk) координаты на левом конце интервала в точке tk уже найдено при работе с предыдущим интервалом (tk-1, tk). Координата вычисляется интегрированием значений соответствующей скорости, полученных на предыдущем этапе, с шагом Δt, величина которого выбирается равной 0,1. В результате интегрирования получаются 10 приближенных значений координаты Х на интервале (tk, tk+1): X∗(tk+Δt), X∗(tk+2Δt), …, X∗(tk+9Δt), X∗(tk+1). Полученные координаты могут отличаться от их точных значений на рассматриваемом интервале из-за ряда причин:
- неточного задания начального значения X(tk);
- ошибок, содержащихся в значениях скорости;
- ошибок численного интегрирования скорости.
На правом конце интервала (tk, tk+1) известно значение XCHC(tk+1) координаты Х по данным приемника СНС на момент времени tk+1. Невязка ΔХ=XCHC(tk+1)-X∗(tk+1) используется при получении окончательных значений координаты Х на интервале (tk, tk+1): Х(tk+iΔt)=(1-β)X∗(tk+iΔt)+βΔXi/10, i=1, 2, …, 10.
Здесь значение параметра β выбирается в пределах от 0,1 до 0,3 и характеризует степень доверия координатам СНС.
В результате применения КОИ формируются траекторные параметры ЛА на протяжении всего полета от взлета до посадки с требуемой частотой. Оценивание характеристик БО производится в блоке 22, в котором используется экспертная система послеполетного анализа материалов летных испытаний. С помощью специализированных комплексов программно-математического обеспечения, разработанных методик, полученных значений параметров траекторного движения ЛА 2 и накопленной базы знаний 33 определяются характеристики бортового оборудования 4 и оценивается их соответствие заданным требованиям.
Если требования формулируются на вероятностном уровне, например погрешность параметра по абсолютной величине с вероятностью 0,95 не должна превышать заданной величины Δ, то оценивание соответствующей погрешности производится статистическими методами. По материалам летных испытаний накапливаются наборы независимых между собой значений соответствующей погрешности. С помощью эффективных статистических методов по полученному набору значений погрешностей оценивается соответствие погрешностей заданным требованиям: определяется вероятность нахождения погрешности в интервале от - Δ до Δ. Если вероятность не менее 0,95, то принимается решение о соответствии погрешности заданным требованиям. Если вероятность нахождения погрешности в заданном интервале оказывается менее 0,95, то из экспертной системы извлекаются возможные причины несоответствия и пути улучшения работы бортового оборудования. Экспертная система (ЭС) 22 обладает возможностями имитировать поведение опытного эксперта в определенной предметной области: она обладает как его знаниями, так и логикой рассуждений. Экспертные знания поступают в процессор, перерабатываются и составляют в своей совокупности базу знаний 33 ЭС. ЭС содержит такую базу данных, включающую в себя данные о предметной области, структуру проблемы, причинно-следственные связи «если …, то …» и др. Механизм логического вывода 25 дает возможность использовать знания эксперта о предметной области. Пользователь вводит в ЭС описание конкретной ситуации, а МЛВ 25 обеспечивает поиск знаний эксперта, относящихся к заданной ситуации, которые позволяют отнести ее к определенному классу решений. Блок объяснений 30 позволяет пользователю понять логику рассуждений эксперта. База знаний 33 является одним из центральных элементов ЭС, который позволяет ведущему инженеру, принимающему решения, использовать модели и знания для поиска наилучшего варианта решения, например выбор ограничений полета в горной местности в неблагоприятных метеоусловиях, сложные подходы к аэропортам из блоков 27, 28.
База знаний 33 в начале работы содержит программу формирования поставленной задачи, а затем появляются факты, которые программа смогла установить к текущему моменту времени. База знаний 33 состоит из операторов преобразования, выраженных в формате правил. Правила содержат переменные, которые уточняются и приводятся в соответствие с известными фактами с помощью процедур унификации или фильтрации в процессе работы машины логического вывода 25 (МЛВ). Унификация является механизмом, который отвечает на вопрос, существуют ли такие комбинации переменных, которые позволяют получить логически идентичные формулы и являются элементом алгоритма резолюций. При выполнении унификации в МЛВ 25 происходит разрешение конфликтов, управление приоритетами, распространение ограничений в блоках 26 -:- 28, выполняется доступ к рабочей памяти 29. Интерпретатор МЛВ 25 управляет порядком выводов, выполнение которых представляется в виде последовательности циклов. Управление ЭС 22 состоит в разрешении конфликтов между правилами, готовыми к выполнению, при оптимальном планировании эксперимента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
Изобретение относится к средствам обеспечения летных испытаний систем и комплексов бортового оборудования летательных аппаратов (ЛА), в частности применимо в системах обеспечения летных испытаний пилотажно-навигационного оборудования ЛА. Техническим результатом является повышение эффективности летных испытаний. В многофункциональном комплексе бортовых траекторных измерений (КБТИ) в состав бортового блока КБТИ введены: многочастотный приемник СНС; блок синхронизации параметров бортовых систем с параметрами траекторного движения ЛА и формирования текущих значений по Гринвичскому времени; блок экспресс-анализа текущей информации систем бортового оборудования; экспертная система автоматизированного анализа погрешностей и определения характеристик бортового оборудования, выполненная в составе машины логического вывода, со связанными с ней базами данных программ полетов, электронных карт местности, базы данных по траекторным и погодным ограничениям, базы знаний рабочей памяти процессора, блоком объяснений, блоком приобретения знаний, выходы последних двух блоков связаны с системой отображения информации (СОИ), в систему послеполетной обработки включен блок комплексной обработки информации (КОИ). 4 ил.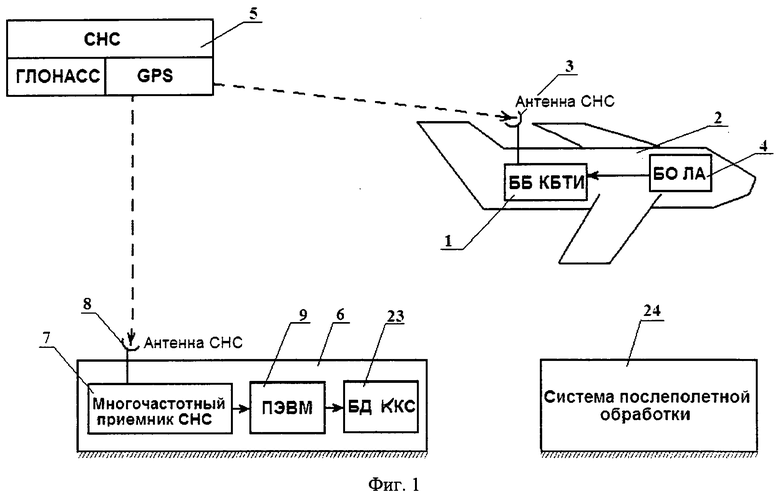
Многофункциональный комплекс бортовых траекторных измерений, включающий наземную и бортовую части комплекса, содержащий в бортовой части - бортовой блок комплекса бортовых траекторных измерений (ББ КБТИ), связанный через встроенные в него адаптеры ввода цифровой информации с выходами бортового оборудования летательного аппарата (БО ЛА), в состав которого входит инерциальная навигационная (ИНС) система; приемник спутниковой навигационной системы (СНС) с антенной, установленной на фюзеляже ЛА; встроенный кварцевый генератор; дисплей блока контроля и управления (БКУ); формируемую во время полета базу данных КБТИ с параметрами бортовых систем (БД КБТИ); а в наземной части - наземную базовую контрольно-корректирующую станцию (ККС) с известными геодезическими координатами, в которой последовательно связаны антенна и приемник СНС из состава ККС, персональную электронную вычислительную машину (ПЭВМ), накапливающую базу данных с информацией приемника СНС (БД ККС), систему послеполетной обработки материалов летных испытаний для исследования характеристик бортового оборудования, отличающийся тем, что в состав бортового блока КБТИ введены многочастотный приемник СНС; блок синхронизации параметров бортовых систем с параметрами траекторного движения ЛА и формирования текущих значений по Гринвичскому времени; блок экспресс-анализа текущей информации систем бортового оборудования, экспертная система автоматизированного анализа погрешностей и определение характеристик бортового оборудования, выполненная в составе машины логического вывода, со связанными с ней базами данных программ полетов, электронных карт местности, базы данных по траекторным и погодным ограничениям, базы знаний рабочей памяти процессора, блоком объяснений, блоком приобретения знаний, выходы последних двух блоков связаны с системой отображения информации (СОИ), при этом выход приемника СНС из состава ББ КБТИ соединен с входами блока синхронизации, БД КБТИ и блока экспресс-анализа, выход кварцевого генератора связан с входом блока синхронизации, адаптеры цифровой информации ввода информации БО ЛА соединены с входами БД КБТИ и через блок экспресс-анализа с входом БКУ, выходы блока синхронизации соединены с входом БД КБТИ и блоком экспресс-анализа; в систему послеполетной обработки включен блок комплексной обработки информации (КОИ), выходы БД КБТИ, БД ККС соединены с входами блока обработки данных СНС, выход которого вместе с выходом БД КБТИ соединены с блоком КОИ, выходы КОИ и БД КБТИ подключены к блоку формирования погрешностей, а его выход и выход БД КБТИ подключены к входам блока базы знаний экспертной системы автоматизированного анализа погрешностей и определения характеристик бортового оборудования.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

