токе, содержащее передний и задний локационные датчики, датчик собственной скорости автомобиля, блоки определения скорости впереди движущегося и сзади следующего автомобилей, блок расчета безопасной дистанции до впереди движущегося автомобиля, блок сравнения безопасной и действительной дистанций, исполнительные механизмы разгона и замедления автомобиля и сигнализатор опасности для сзади следующего автомобиля, отличающееся тем, что, с целью повышения безопасности движения, оно снабжено контроллером экстренного режима, вход которого связан с выходом блока определения скорости впереди движущегося автомобиля, блоком расчета оптимального запаздывания исполнительного механизма замедления, имеющим четыре входа, первый из которых соединен с выходом сигнала дистанции заднего локационного датчика, второй - с выходом блока определения скорости впереди движущегося автомобиля, третий - с выходом датчика собственной скорости автомобиля, четвертый - с выходом блока определения скорости сзади следующего автомобиля, а выход подключен к входу блока сравнения оптимального времени запаздывания с действительным, выход которого связан с входом сигнализатора и с первым входом блока задержки экстренного режима, второй вход которого соединен с выходом контроллера экстренного режима, а выход - с исполнительным механизмом замедления и сигнализатором.
2. Устройство по п. I, отличающееся тем, что блок расчета оптимального запаздыва
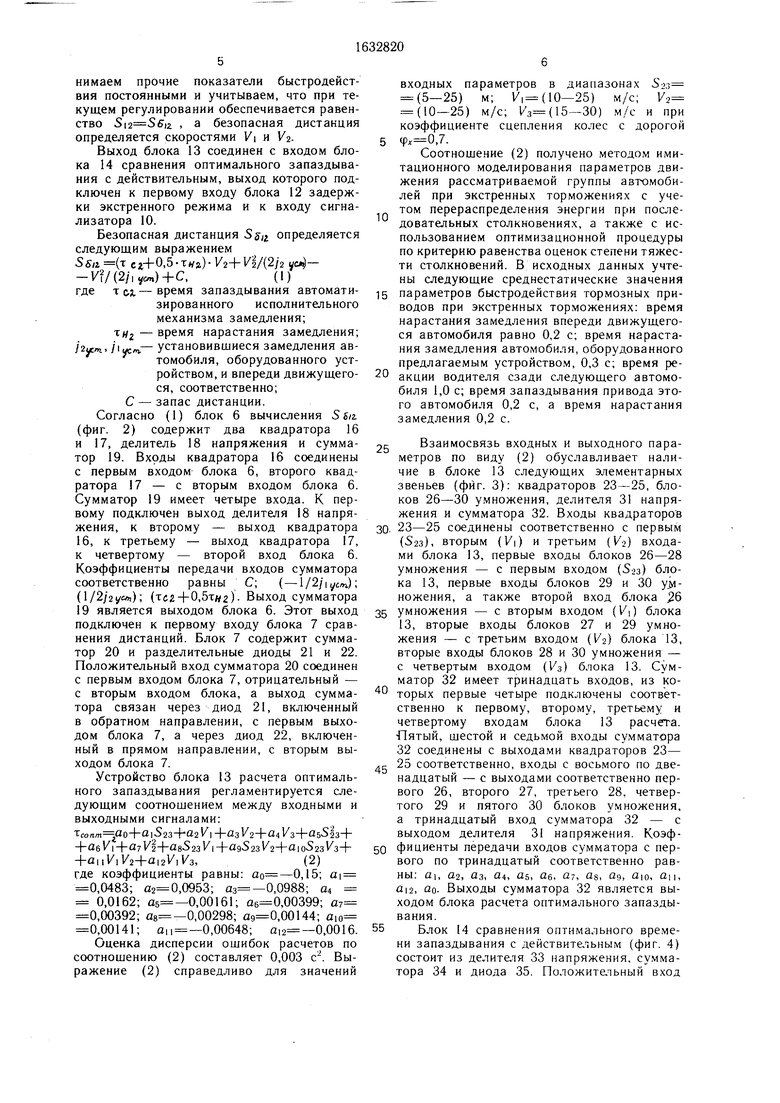
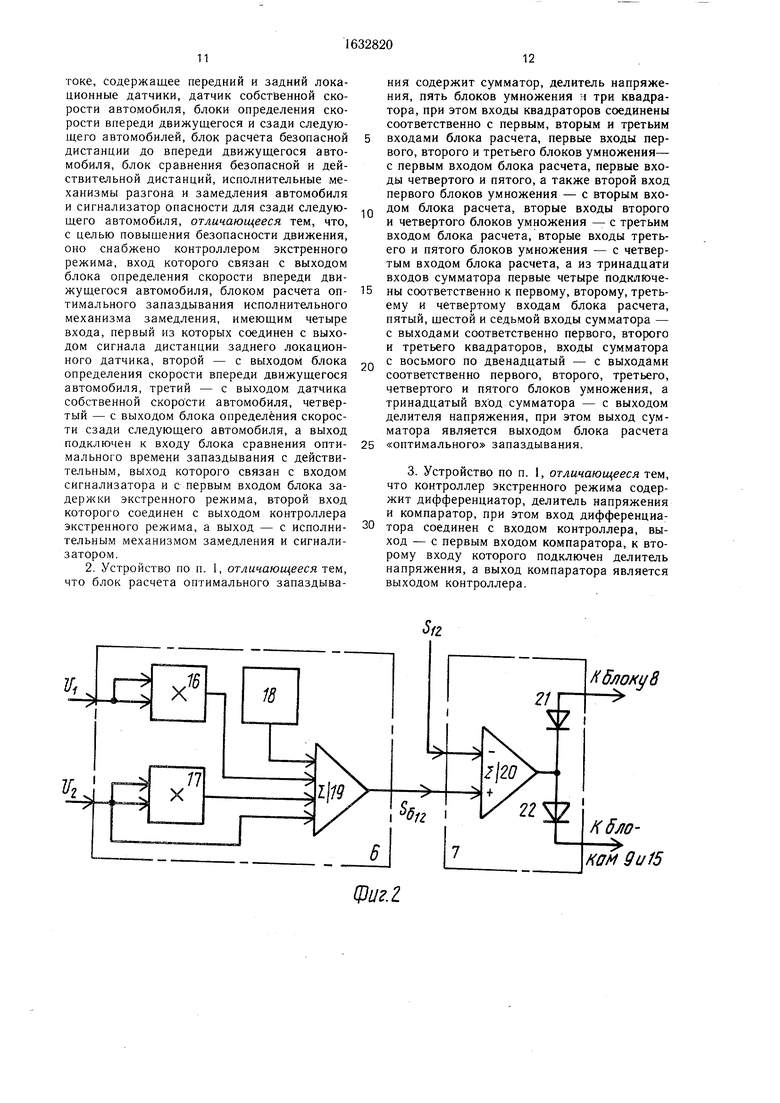
ния содержит сумматор, делитель напряжения, пять блоков умножения ч три квадратора, при этом входы квадраторов соединены соответственно с первым, вторым и третьим
входами блока расчета, первые входы первого, второго и третьего блоков умножения- с первым входом блока расчета, первые входы четвертого и пятого, а также второй вход первого блоков умножения - с вторым входом блока расчета, вторые входы второго и четвертого блоков умножения - с третьим входом блока расчета, вторые входы третьего и пятого блоков умножения - с четвертым входом блока расчета, а из тринадцати входов сумматора первые четыре подключены соответственно к первому, второму, третьему и четвертому входам блока расчета, пятый, шестой и седьмой входы сумматора - с выходами соответственно первого, второго и третьего квадраторов, входы сумматора с восьмого по двенадцатый - с выходами соответственно первого, второго, третьего, четвертого и пятого блоков умножения, а тринадцатый вход сумматора - с выходом делителя напряжения, при этом выход сумматора является выходом блока расчета
5 «оптимального запаздывания.
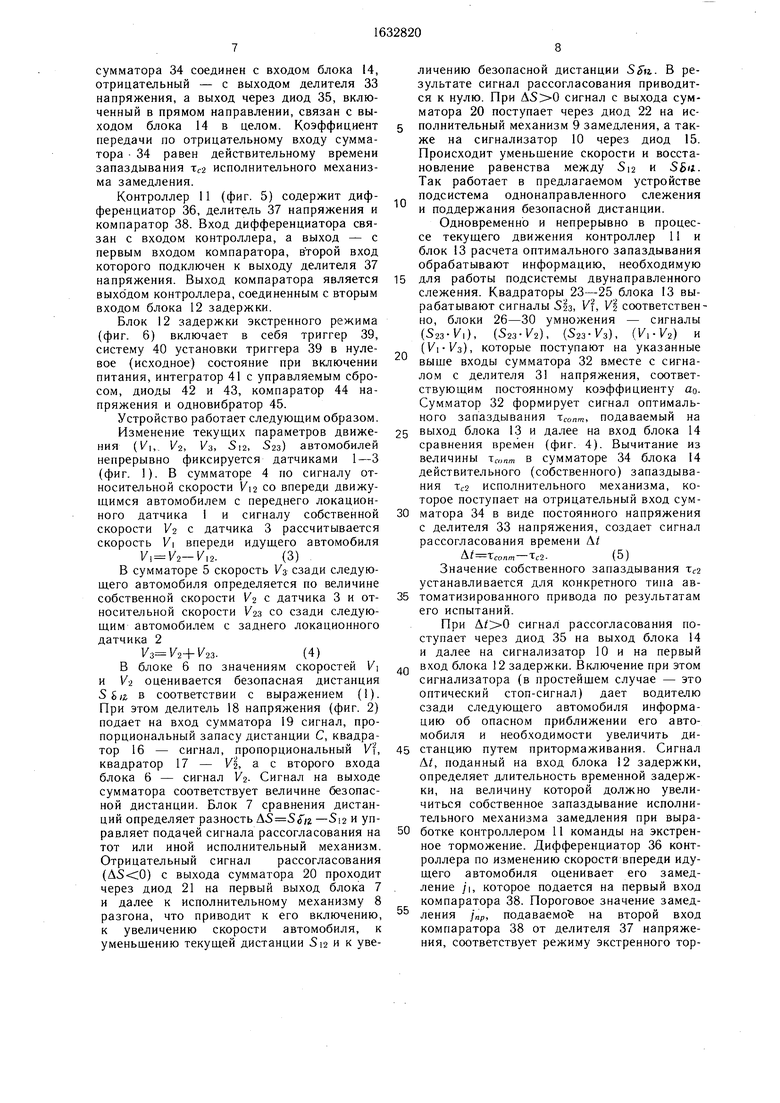
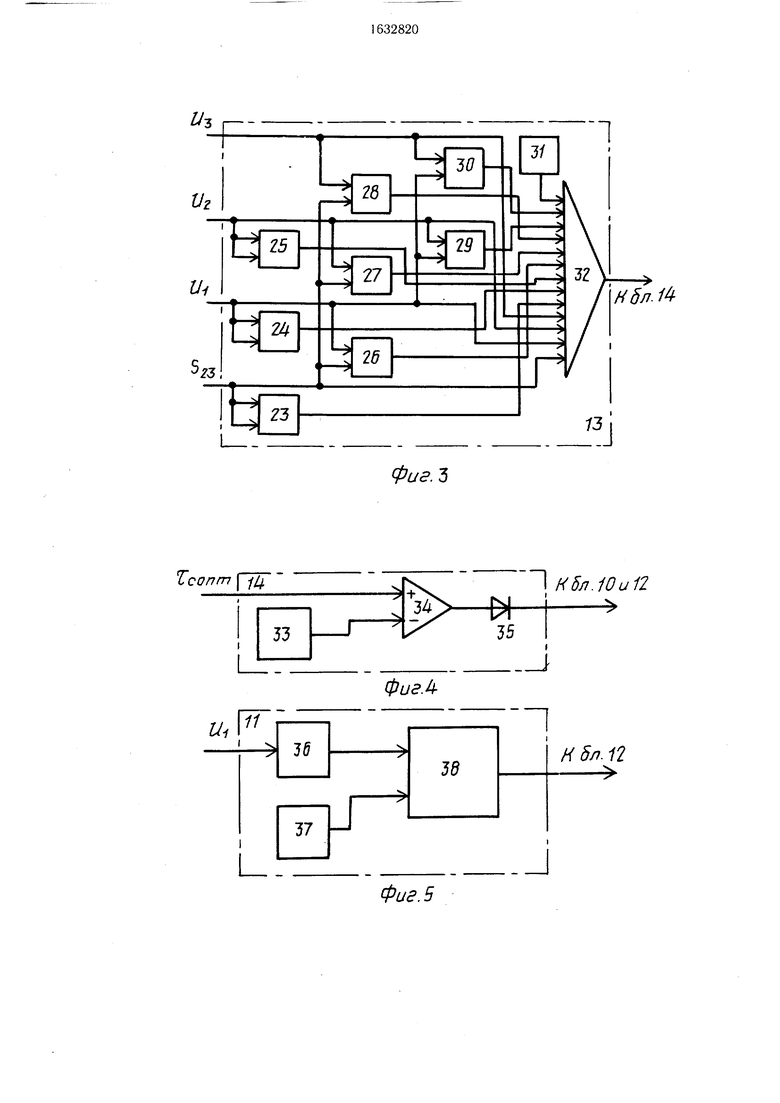
3. Устройство по п. 1, отличающееся тем, что контроллер экстренного режима содержит дифференциатор, делитель напряжения и компаратор, при этом вход дифференциа- 0 тора соединен с входом контроллера, выход - с первым входом компаратора, к второму входу которого подключен делитель напряжения, а выход компаратора является выходом контроллера.
0
Иъ
Л
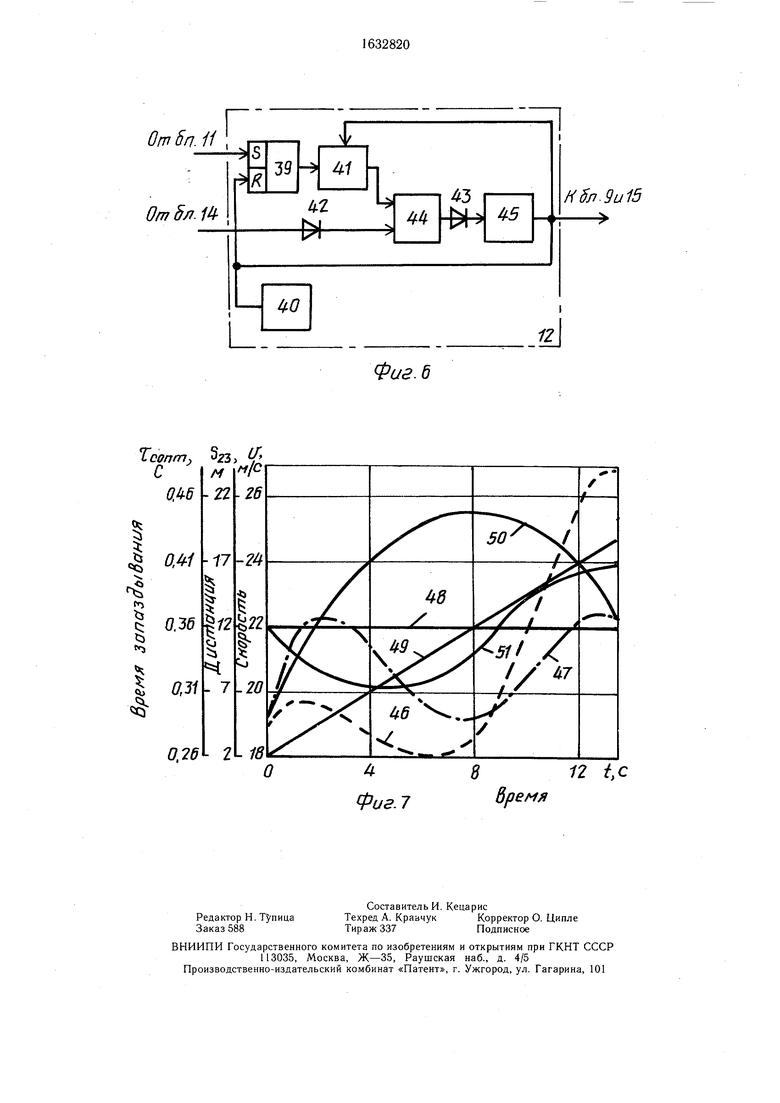
Изобретение относится к системам автоматизированного управления автомобилем, использующим локационные датчики, особенно эффективно оно для автомобилей, перевозящих людей, опасные грузы или специальное оборудование Цель изобретения - повышение безопасности движения - достигается путем снижения неравномерности движения за счет уменьшения количества управляющих воздействий на автоматизированные исполнительные механизмы разгона и замедления Для этого устройство содержит передний и задний локационные датчики 1 и 2, фиксирующие расстояния и относительные скорости движения по отношению к переднему и заднему автомобилям, блоки 4 и 5 определения абсолютных скоростей этих автомобилей и датчик 3 собственной скорости Поддержание безопасной дистанции в неэкстренной ситуации осуществляется подсистемой с однонаправленным слежением путем расчета в блоке 6 безопасной дистанции, сравнения ее с действительной в блоке 7 и подачи сигнала рассогласования на исполнительный механизм разгона 8 или замедления 9 и сигнализатор 10 К подсистеме двунаправленного слежения, кроме датчиков, относятся блок 13 расчета оптимального запаздывания механизма 9 замедления, блок 14 сравнения оптимального запаздывания с действительным, контроллер 11 экстренного режима и блок 12 задержки экстренного режима При движении непрерывно в блоке 13 по величинам скоростей всех трех автомобилей и дистанции до и сзади следующего автомобиля рассчитывается оптимальное запаздывание, при котором обеспечивается минимальная тяжесть последствий столкновений автомобилей в экстренной ситуации 2 з п ф-лы, 7 ил SЈ (Л
Тсопт
Нбл-М
фиа.Ъ
П К 5л. 10 и 12
35
.-I
фигЛ
.J
Фиг. 5
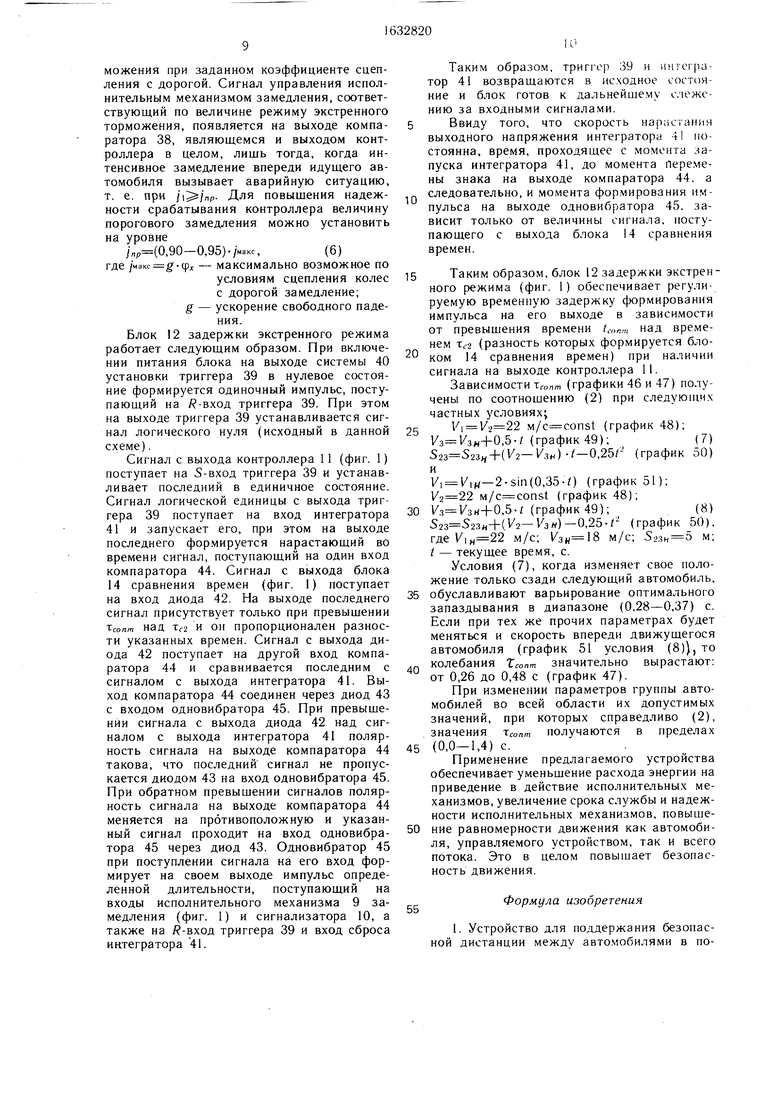
Тоопт , lf
м
0,41
0.36
0,31
17
§12
. 7
.20
0,26
L г
H8
Фиг. 6
A Фиг.7
812 t,c
Время
| Устройство для автоматического обеспечения оптимальной дистанции между автомобилями в потоке | 1986 |
|
SU1373594A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
