Предлагаемое изобретение относится к области космической радионавигации и может быть использовано для определения углового положения объектов в пространстве.
Известен способ угловой ориентации объектов в пространстве, основанный на приеме сигналов космических аппаратов (КА) глобальных навигационных спутниковых систем каждым из четырех антенно-приемных устройств, расположенных на осях объектов, выделении сигнала с частотой Доплера, определении набега фаз колебаний с частотой Доплера путем интегрирования их на мерном интервале и определении углового положения объектов (Патент РФ N 20222294, кл. G 01 S 5/00).
Недостатком способа является длительное время, необходимое для проведения измерения углового положения. Это связано с тем, что для решения задачи угловой ориентации необходимо, чтобы космические аппараты, излучаемые сигналы, за время измерения существенно переместились в пространстве. Для космических аппаратов глобальных навигационных спутниковых систем (в настоящее время существует две системы: Российская система ГЛОНАСС и американская - GPS), период обращения которых вокруг Земли составляет около 12 часов, необходимое время измерения соответствует десяткам минут - часам. Это существенно ограничивает возможность применения способа.
Известен способ угловой ориентации объектов в пространстве, основанный на приеме сигналов космических аппаратов (КА) глобальных навигационных спутниковых систем на разнесенные две или более антенн, расположенные параллельно одной или двух осей измеряемого объекта, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата и определении углового положения осей измеряемого объекта путем решения системы уравнений (Зарубежная радиоэлектроника, 1989, стр. 45 -53).
Недостатком способа является низкая точность измерения углов, связанная с тем, что антенны нужно располагать на малом расстоянии - расстоянии, меньшем длины волны. При увеличении расстояния между антеннами погрешность измерения углов уменьшается, но появляется неоднозначность фазовых измерений, что приводит к неоднозначному определению углового положения объекта.
Известен также способ угловой ориентации объектов в пространстве, взятый в качестве прототипа, основанный на приеме сигналов космических аппаратов глобальных навигационных спутниковых систем двумя или более разнесенными в пространстве антеннами, измерении фазовых сдвигов сигналов, принятых на разные антенны, нахождении параметров X, Y, Z, где X, Y, Z - произведение направляющих косинусов вектора-база, на концах которого установлены антенны, cosBx, cosBy, cosBz на длину вектора-базы B, и систематических погрешностей по минимуму модуля логарифма функции правдоподобия, определении направляющих косинусов и баз, для всех неоднозначностей измеряемого фазового сдвига, вычислении по направляющим косинусам угла азимута и места при одной базе и дополнительно угла крена и угла между базами при двух и более базах, а также значений модулей логарифма функции правдоподобия, отбраковке неоднозначностей с учетом априорных сведений об угле места, азимута, крена, угле между базами, длин баз, систематической погрешности и допускаемых значений модулей функции правдоподобия (Патент США N 5296861).
Недостатком способа является недостаточная достоверность разрешения имеющихся неоднозначностей измеряемого фазового сдвига. При нахождении углового положения объекта (его направляющих косинусов) возникает несколько решений и в связи с этим определение углового положения объектов в ряде случаев оказывается невозможным.
Задачей изобретения является обеспечение более высокой достоверности разрешения неоднозначности измеряемого фазового сдвига путем проведения дополнительных измерений фазового сдвига и более сложной обработки результатов измерений.
Поставленная задача достигается тем, что в известном способе угловой ориентации объектов в пространстве, основанном на приеме сигналов космических аппаратов глобальных навигационных спутниковых систем двумя или более разнесенными в пространстве антеннами, измерении фазовых сдвигов сигналов, принятых на разные антенны, нахождении параметров X, Y, Z и систематических погрешностей Δϕc по минимуму модуля логарифма функции правдоподобия W(X,Y,Z,Δϕc), равного
где X, Y, Z - произведение направляющих косинусов вектора-база, на концах которого установлены антенны, cosBx, cosBy, cosBz, на длину вектора-базы B;
kxi, kyi, kzi - коэффициенты, равные направляющим косинусам направления "объект - i-й космической аппарат";
λi - длина волны сигнала i-го космического аппарата;
n - число космических аппаратов, сигналы которых применяются;
ki - значение неоднозначности фазового сдвига сигнала, принимаемого от i-го космического аппарата, равное целому числу;
Δϕc - систематическая погрешность;
ϕi - измеренное значение фазового сдвига;
определении направляющих косинусов и баз по формуле

для всех неоднозначностей измеряемого фазового сдвига, вычислении по направляющим косинусам угла азимута и места при одной базе и дополнительно угла крена и угла между базами при двух и более базах, а также значений модулей логарифма функции правдоподобия, отбраковке неоднозначностей с учетом априорных сведений об угле места, азимута, крена, угле между базами, длин баз, систематической погрешности и допускаемых значений модулей функции правдоподобия, согласно изобретению проводят m дополнительных измерений фазовых сдвигов, по результатам каждого из измерений фазовых сдвигов находят параметры X, Y, Z и систематическую погрешность по минимуму логарифма функции правдоподобия только для неоднозначностей, отобранных по результатам первого измерения, определяют для этих неоднозначностей направляющие косинусы, базы и значения модулей логарифма функции правдоподобия, отбраковывают неоднозначности с учетом априорных сведений, определяют сумму модулей логарифма функции правдоподобия и окончательное решение принимают соответствующим неоднозначности, сумма модулей функции правдоподобия которой окажется ниже заданного порога, причем для отбракованных неоднозначностей значение логарифма функции правдоподобия устанавливают равным штрафной величине.
Сущность предлагаемого способа заключается в следующем.
Направляющие косинусы вектора-базы вычисляют на основе измеренных фазовых сдвигов между разнесенными антеннами с помощью системы уравнений: (1)
(1)

- направляющие косинусы вектора "объект - i-й космический аппарат",
Xci, Yci, Zci - координаты i-го космического аппарата в геоцентрической системе координат;
X0, Y0, Z0 - координаты объекта в геоцентрической системе координат;
X, Y, Z- произведение направляющих косинусов вектора-базы, на концах которого установлены антенны, cosBx, cosBy, cosBz на длину вектора-базы B;
λi - длина волны сигналов i-го космического аппарата;
ki - целочисленная неоднозначность измерения фазового сдвига сигналов i-го космического аппарата:
n - число космических аппаратов;
ϕi - измеренное значение фазового сдвига между разнесенными антеннами сигналов i-го космического аппарата;
Δϕci - систематическая погрешность измерения фазового сдвига.
Если рассматривать систематическую погрешность измерения фазового сдвига как разность задержек сигналов в каналах приемоиндикатора, то величины  во всех уравнениях совпадают, и система уравнений (1) содержит 4 неизвестных - X, Y, Z и величину систематической погрешности. Кроме этих четырех неизвестных имеется неизвестная целочисленная неоднозначность измерения фазового сдвига ki для каждого спутника. Разрешение неоднозначности производится путем их перебора, т.е. решается система уравнений (1) для всех возможных значений ki. В результате получается множество решений, часть которых отбраковывается с учетом априорных данных, а окончательное решение выбирается по критерию максимального правдоподобия.
во всех уравнениях совпадают, и система уравнений (1) содержит 4 неизвестных - X, Y, Z и величину систематической погрешности. Кроме этих четырех неизвестных имеется неизвестная целочисленная неоднозначность измерения фазового сдвига ki для каждого спутника. Разрешение неоднозначности производится путем их перебора, т.е. решается система уравнений (1) для всех возможных значений ki. В результате получается множество решений, часть которых отбраковывается с учетом априорных данных, а окончательное решение выбирается по критерию максимального правдоподобия.
При решении задачи возникают следующие проблемы.
При переборе неоднозначности имеется большое количество комбинаций ki, равное  , где n - количество космических аппаратов в расчете, kmax = B/λ - максимальное значение неоднозначности, B - длина базы, λ - длина волны; для каждой комбинации необходимо решить систему уравнений (1), что требует больших вычислительных затрат. Например, при базе В = 1 м, длине волны λ = 18 см и числе принимаемых космических аппаратов n = 4 количество комбинаций неоднозначности составляет более 4 миллионов, а при n = 8 - около 8.6•109. При увеличении длины базы количество комбинаций неоднозначности возрастает по экспоненциальному закону.
, где n - количество космических аппаратов в расчете, kmax = B/λ - максимальное значение неоднозначности, B - длина базы, λ - длина волны; для каждой комбинации необходимо решить систему уравнений (1), что требует больших вычислительных затрат. Например, при базе В = 1 м, длине волны λ = 18 см и числе принимаемых космических аппаратов n = 4 количество комбинаций неоднозначности составляет более 4 миллионов, а при n = 8 - около 8.6•109. При увеличении длины базы количество комбинаций неоднозначности возрастает по экспоненциальному закону.
При выборе окончательного решения из большого числа возможных решений по критерию максимума функции правдоподобия возможны ошибки, вызванные тем, что некоторым ложным решениям соответствуют значения функции правдоподобия, мало отличающиеся от значения функции правдоподобия, соответствующего истинному решению. В результате влияния шумов функция правдоподобия может иметь максимум при ложном решении. Исследования показали, что при длине базы В = 1 м и при числе принимаемых космических аппаратов от 5 до 9 и среднеквадратической шумовой погрешности измерения фазового сдвига σϕ/ = 10o вероятность принятия верного решения составляет 0.5...0.8.
Проблема уменьшения объемов вычислений решается тем, что перебор значений неоднозначности производится в два этапа. На первом этапе для каждой базы задача решается для минимального созвездия, состоящего из четырех космических аппаратов (т.е. для неизбыточной системы уравнений) для всех возможных значений неоднозначности ki. При этом количество комбинаций неоднозначности для заданной длины базы минимально. Полученные решения отбраковываются с учетом априорных данных о длине баз, угле между ними и значении систематической погрешности. Решения, удовлетворяющие априорным данным, составляют начальный набор возможных решений и соответствующие этим решениям комбинации неоднозначности. В результате отбраковки заведомо ложных решений существенно снижается количество комбинаций неоднозначности измерения фазовых сдвигов при решении задачи на втором этапе.
На втором этапе в расчет вводится один из оставшихся космических аппаратов; задача решается только для начального набора возможных решений, полученного на первом этапе при всех возможных значениях неоднозначности ki вновь вводимого космического аппарата. Составляется новый набор возможных решений путем отбраковки полученных решений по значению систематической погрешности, допустимому отклонению полученной длины базы и угла между базами, а также по допустимому значению логарифма функции правдоподобия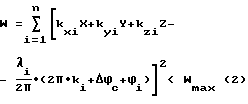
Далее в расчет вводится очередной космический аппарат и аналогичным образом составляется новый набор возможных решений. Обработка результатов измерения завершается после введения в расчет сигналов всех космических аппаратов.
Как показывают результаты исследований, при введении в расчет очередного космического аппарата количество возможных решений в начальном наборе заметно сокращается. Например, при длине базы В = 0.7 м при решении задачи по 4-м космическим аппаратам число возможных решений в начальном наборе по каждой базе может доходить до 70, а при введении в расчет 9 спутников их количество сокращается до 4...8 по каждой базе. После последующей отбраковки по углу между базами совместный начальный набор сокращается до 1. 5. Окончательное решение выбирается по критерию минимума модуля логарифма функции правдоподобия (2). Производилась оценка быстродействия данного алгоритма. Основное время вычисления занимает первый этап решения задачи. На процессоре Pentium-120 при базе В = 0.7 м временные затраты при решении задачи составляют 0.15. . . 0.2 с. При увеличении базы до 1.5 м время вычисления возрастает до 3...5 с.
Проблема достоверности полученного решения решается тем, что при дополнительных измерениях анализируется не только окончательное решение, но и весь набор возможных решений, полученных на предыдущем этапе. При втором и дальнейших измерениях фазовых сдвигов задача угловой ориентации решается только при значениях неоднозначности фазового сдвига ki из полученного ранее набора возможных решений. При этом вычисляются текущие значения направляющих косинусов векторов-баз, их длина и угол между базами, а также значения логарифма функции правдоподобия (2) для каждой базы и производится отбраковка возможных решений с учетом априорных сведений. Далее, для каждого возможного решения вычисляется среднее значение логарифма функции правдоподобия, причем для отбракованных решений в данном измерении начисляется штрафное значение. В случае, если среднее значение логарифма функции правдоподобия превышает максимально допустимое значение, данное решение удаляется из набора возможных решений. Штрафное значение выбирается исходя из допустимого значения вероятности отбраковки верного решения. От величины штрафа зависит число измерений, при которых отбраковывается данное решение, для того, чтобы это решение было удалено из набора возможных решений.
В случае если набор возможных решений содержит более одного решения, то окончательным решением считается решение с минимальным средним значением логарифма функции правдоподобия W; о достоверности полученного решения можно судить по значению логарифма функции правдоподобия, а также по количеству возможных решений в наборе. Следует заметить, что наибольших вычислительных затрат требует первое измерение, при котором составляется начальный набор возможных решений. При последующих измерениях время вычислений резко сокращается, например, при длине базы 0,7 м для обработки первого измерения на процессоре PENTIUM-120 требуется 0,15...0,2 с, а при последующих - 0,01... 0,02 с.
Изoбpeтeниe позволяет определять ориентацию объектов при помощи глобальных навигационных спутниковых систем путем измерения фазовых сдвигов сигналов, принимаемых на разнесенные антенны. Измерение углового положения объекта основано на использовании функции правдоподобия. Устранение неоднозначности фазовых измерений производится использованием априорных сведений, а также проведением дополнительных измерений, что и является достигаемым техническим результатом. Окончательное решение соответствует неоднозначности с минимальным значением среднего значения логарифма функции правдоподобия, причем для отбракованных решений начисляется штрафное значение, которое выбирается исходя из допустимого значения вероятности отбраковки верного решения.
Способ угловой ориентации объектов в пространстве, основанный на приеме сигналов космических аппаратов глобальных навигационных спутниковых систем двумя или более разнесенными в пространстве антеннами, измерении фазовых сдвигов сигналов, принятых на разные антенны, нахождении параметров X, Y, Z и систематических погрешностей по минимуму модуля логарифма функции правдоподобия, равного
где X, Y, Z - произведение направляющих косинусов вектора-база, на концах которого установлены антенны, cos Bx, cos By, cos Bz, на длину вектора - базы B;
Kxi, Kyi, Kzi - коэффициенты, равные направляющим косинусам направления "объект - i-й космический аппарат";
λi - длина волны сигнала i-го космического аппарата;
n - число космических аппаратов, сигналы которых принимаются;
ki - значение неоднозначности фазового сдвига сигнала, принимаемого от i-го космического аппарата, равное целому числу;
Δϕc - систематическая погрешность;
Δϕi - измеренное значение фазового сдвига;
определении направляющих косинусов баз по формуле

для всех неоднозначностей измеряемого фазового сдвига, вычислении по направляющим косинусам угла азимута и места при одной базе и дополнительно угла крена и угла между базами при двух и более баз, а также значений модулей логарифма функции правдоподобия, отбраковке неоднозначностей с учетом априорных сведений об угле места, азимута, крена, угле между базами, длин баз, систематической погрешности и допускаемых значений модулей функции правдоподобия, отличающийся тем, что проводят дополнительные измерения фазовых сдвигов, по результатам каждого из которых находят параметры X, Y, Z и систематическую погрешность по минимуму логарифма функции правдоподобия только для неоднозначностей, отобранных по результатам первого измерения, определяют для этих неоднозначностей направляющие косинусы, базы и значения модулей логарифма функции правдоподобия, отбраковывают неоднозначности с учетом априорных сведений, определяют сумму модулей логарифма функции правдоподобия, и окончательное решение принимают соответствующим неоднозначности, сумма модулей функции правдоподобия которой окажется ниже заданного порога, причем для отбракованных неоднозначностей значение логарифма функции правдоподобия устанавливают, исходя из допустимой вероятности отбраковки верного решения.
| US 5296861 A, 22.03.94 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА И КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 1992 |
|
RU2022294C1 |
| RU 94014803 A1, 27.05.96 | |||
| RU 94031143 A1, 27.08.96 | |||
| RU 94001458 A1, 10.10.95 | |||
| US 4894662 A, 16.01.90 | |||
| US 4963889 A, 10.12.91 | |||
| US 5198822 A, 30.03.93 | |||
| Приемное устройство вибрационного магнитометра | 1977 |
|
SU679901A1 |
