(56)Авторское свидетельство СССР № 782114, кл. Н 02 Р 7/42, 1978.
Ковач К.II. и др. Переходные процессы в машинах переменного тока. - М.- Л.: Государственное электротехническое изд-во, 1963, с. 744.
Авторское свидетельство СССР № 1185526, 1.1.11 .84.
(54) СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУ11ЕСТВЛЕНИЯ
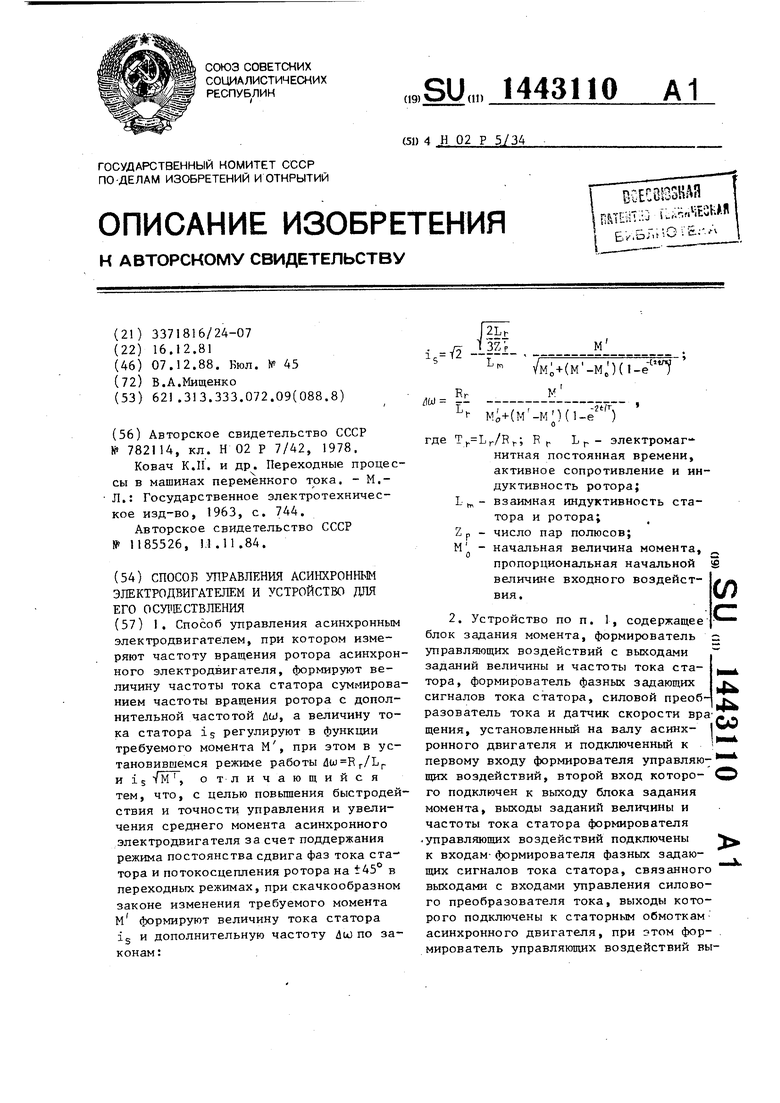
(57)1. Способ управления асинхронным электродвигателем, при котором измеряют частоту вращения ротора асинхронного электродвигателя, формируют величину частоты тока статора суммированием частоты вращения ротора с дополнительной частотой dw, а величину тока статора is регулируют в функции требуемого момента М , при этом в установившемся режиме работы Ли Rr/L
к i s VM , отличающийся тем, что, с целью повыщения быстродействия и точности управления и увеличения среднего момента асинхронного электродвигателя за счет поддержания режима постоянства сдвига фаз тока статора и потокосцепления ротора на t45 в переходных режимах, при скачкообразном законе изменения требуемого момента М формируют величину тока статора ig и дополнительную частоту Лиз по законам:
где ./R(-; R (- I г электромаг- нитная постоянная времени, активное сопротивление и индуктивность ротора;
взаимная индуктивность статора и ротора;
ZP - число пар полюсов;
М - начальная величина момента, „ пропорциональная начальной S величине входного воздействия.
(Л
4;;
2. Устройство по п. 1, содержащее блок задания момента, формирователь с управляющих воздействий с выходами заданий величины и частоты тока статора, формирователь фазных задающих сигналов тока статора, силовой преобразователь тока и датчик скорости вра -
iCO
щения, установленньш на валу асинх- j
ройного двигателя и подключенный к первому входу формирователя управляю- щих воздействий, второй вход которо- го подключен к выходу блока задания момента, выходы заданий величины и частоты тока статора формирователя -управляющих воздействий подключены к входам- формирователя фазных задающих сигналов тока статора, связанного выходами с входами управления силового преобразователя тока, выходы которого подключены к статорным обмоткам асинхронного двигателя, при этом фор- , мирователь управляющих воздействий выполней в виде апериодического звена, двух элементов деления и сумматора, первый вход и выход которого образзг- ют соответственно первый вход и выход задания частоты формирователя управляющих воздействий, второй вход сумматора подключен к выходу первого элемента деления, причем вход делимого второго элемента деления образует второй вход формирователя управляющих воздействий, выход второго элемента деления связан с выходом задания величины тока статора формирователя управляющих воздействий и подключен к входу делимого первого элемента деления, входы делителей обоих элементо
деления объединены между собой и подключены к выходу апериодического звена, о тличающееся тем, что, с целью улучшения энергетических показателей за счет уменьшения потерь в ас.инхронном двигателе, в формирователь управл5пощих воздействий введен элемент пропорционального преобразования с коэффициентом /, вход которого подключен к выходу второго элемента деления, а выход образует в ыход задания величины тока статора формирователя управляющих воздействий, при это вход апериодического звена подключен к выходу второго элемента деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
1
Изобретение относится к электротехнике, в частности к регулируемому электроприводу переменного тока, и может быть использовано для управления моментом, регулирования скорости и отработки перемещения рабочих органов промышленных роботов, станков и других машин и механизмов, оснащенных асинхронными двигателями с короткозам- кнутым ротором.
Цель изобретения - повьш1ение быстродействия и точности управления, увеличение среднего момента асинхронного электродвигателя за счет поддержания режима постоянства сдвига фаз тока статора и потокосцепления ротора на ±45° в переходных режимах, а также улучшение энергетических показателей.
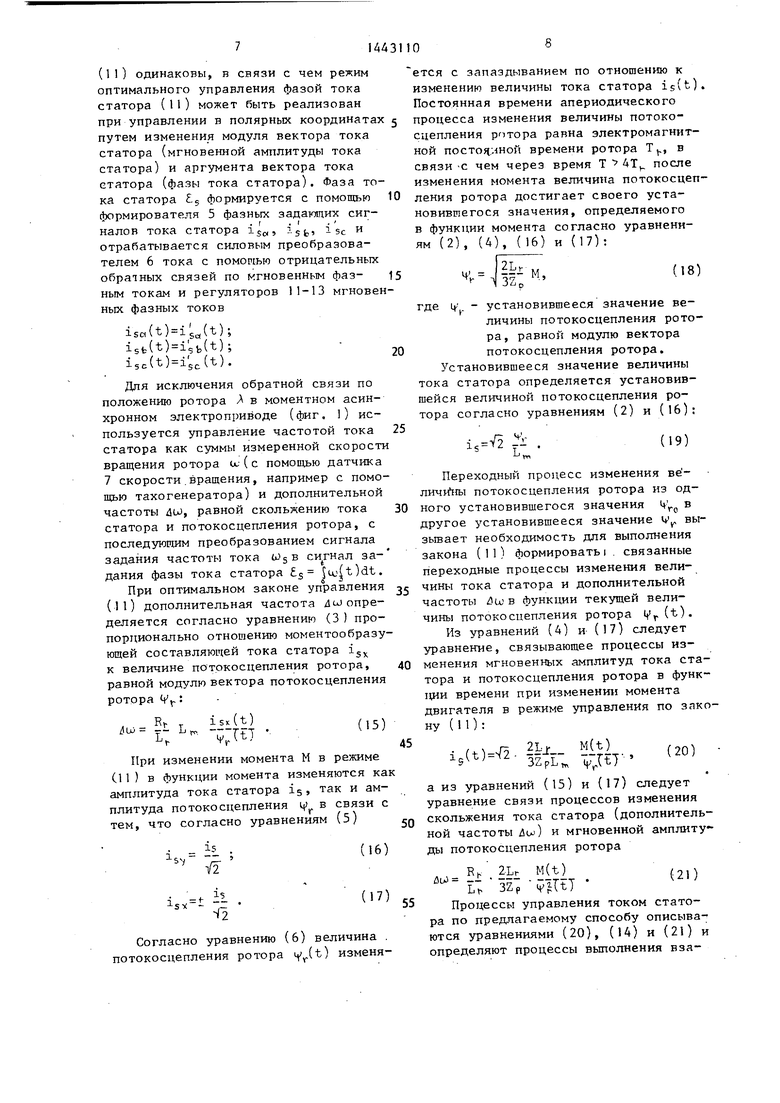
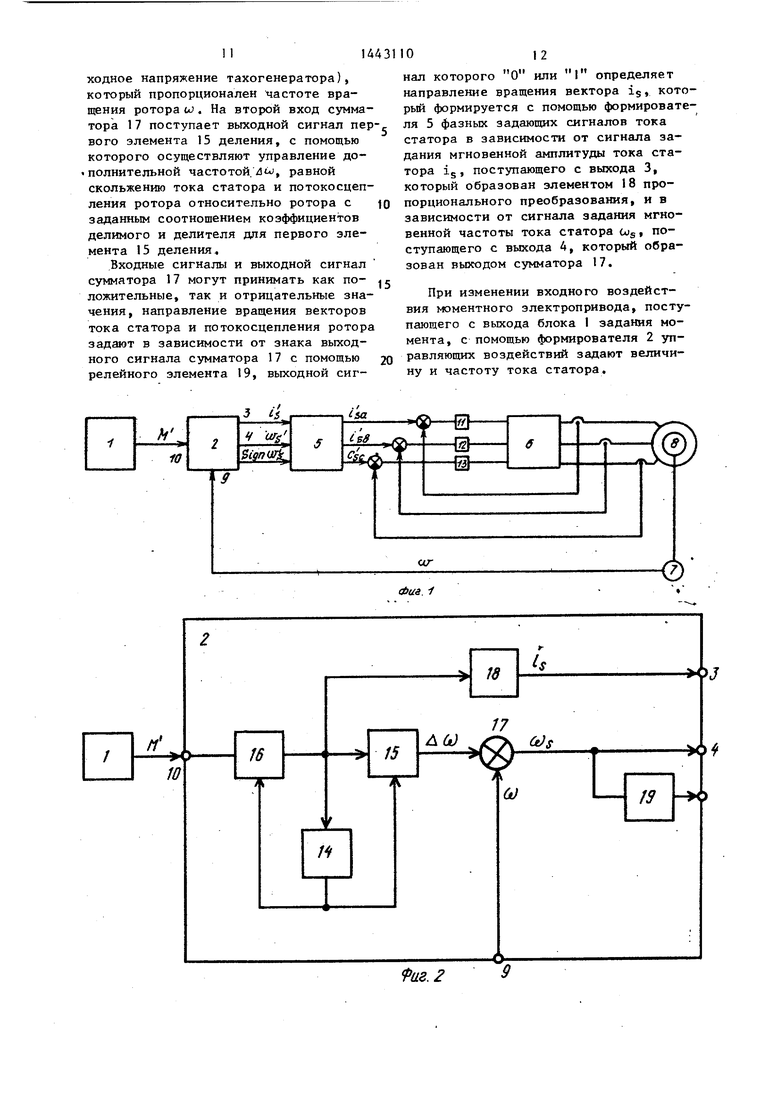
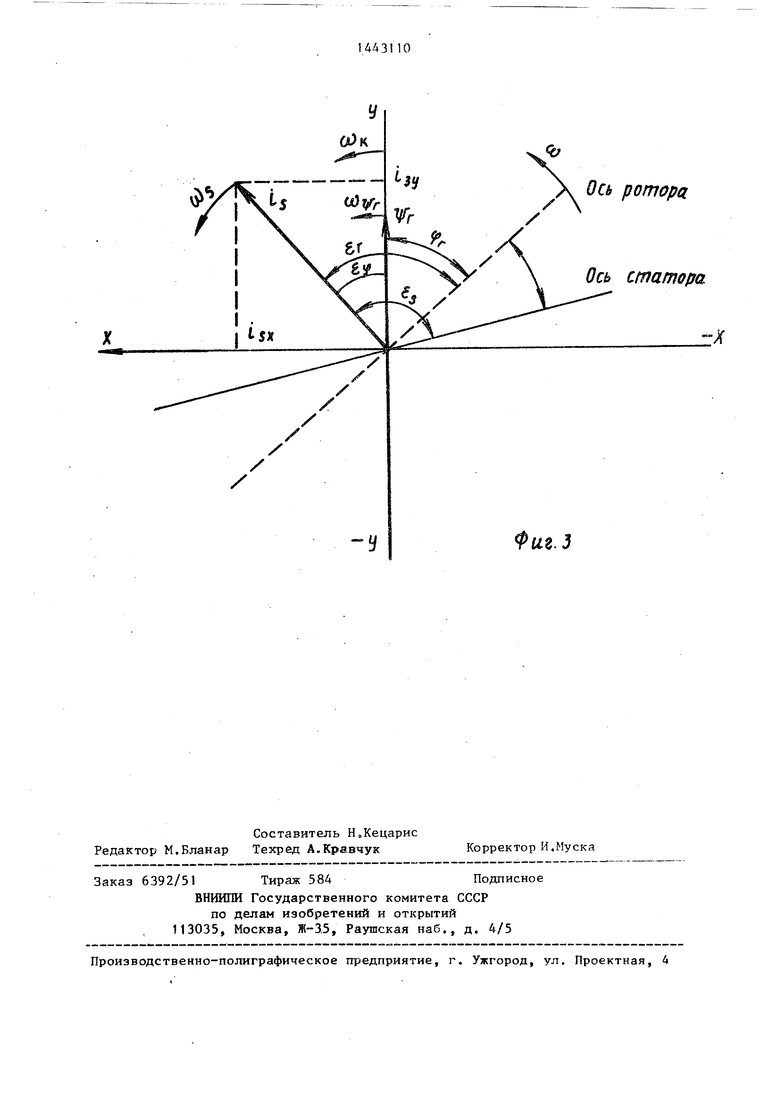
На фиг, 1 представлена структурная схема моментного асинхронного электропривода; на фиг, 2 - структзфная схема формирователя з равляющих воздействий; на фиг, 3 - векторная диаграмма, поясняющая способ управления.
Устройство для управления асинх- ронньм электродвигателем содержит блок I задания момента (фиг. 1), формирователь 2 управляющих воздействий с выходом 3 задания величины тока статорами с выходом 4 задания, частоты тока статора, формирователь 5 фазных задающих сигналов то,ка статора, силовой преобразователь 6 тока и датчик 7 скорости вращения, установленный на валу асинхронного электродвигателя 8 с короткоеамкнутым ротором и подключенный к входу 9 формирователя 2 управляющих воздействий, вход 10 которого подключен к выходу блока 1 задания момента. Выходы 3 и 4 заданий величины и частоты тока статора соот0 ветственно формирователя 2 управляющих воздействий подключены к входам формирователя 5 фазных задающих сигналов тока статора, связанного выходами через регуляторы 11-13 мгновенных
5 фазных токов с входами управления силового преобразователя 6 тока, выходы которого подключены к статорным обмоткам асинхронного электродвигателя 8,
Формирователь 2 управляющих воздействий содержит апериодическое звено 14 (фиг, 2), первый 15 и второй 16 элементы деления и сумматор 17, пер5 вый вход которого образует вход 9 формирователя 2 управляющих воздействий. Выход сумматора 17 образует выход 4 задания частоты формирователя 2 управляющих воздействий. Второй
Q вход су ®1атора 17 подключен к выходу первого элемента I5 деления. Вход делимого второго элемента 16 деления образует вход 10 формирователя 2 уп- равляющ1гх воздействий. Выход второго
314
элемента 16 деленнр подключен к элементу 18 пропорционального преобра- . зования, выход которого образует выход 3 задания величины тока статора формирователя 2 управляющих воздей- ствий. Выход второго элемента 1-6 де- ления подключен также к входу апериодического звена 14, выход которого подключен к объединенным между собой входам делителей элементов 15 и 16 деления. К вьтоду сумматора 17 подключен релейньй элемент 19.
Устройство работает следующим образом. „ „ Входное воздействие электропривода с выхода блока 1 задания момента поступает на вход 10 формирователя 2 управляющих воздействий. Величина
входного воздействия электропривода пропорциональна величине требуемого момента М .
В формирователе 2 управляющих воздействий формируются задающие сигналы величины тока статора is и частоты тока статора w,-5, которые поступают с выходов 3 и 4 соответственно на соответствующие входы формирователя 5 фазных задающих сигналов тока статора i soo isfc -sc которые подаются на входы регуляторов 11-13 мгновенных фазных токов и практически безынерционно отрабатываются силовым преобразователем 6 тока, например транзисторНЫМ импульсным инвертором, с помощью
отрицательных обратных связей по мгновенным фазным токам, подаваемым с выходов силового преобразователя 6 тока на входы регуляторов П-13 мгновенных фазных токов. В результате переключе- ния ключевых элементов силового преобразователя 6 тока в статорньтх обмотках асинхронного электродвигателя 8 фазные токи изменяются в соответствии с заданными величинами мгновенной ам- плитуды и мгновенной частоты в зависимости от входного воздействия М и измеренной частоты вращения ротора и, величина которой измеряется с помощью датчика 7. скорюсти вращения,
Для обеспечения безынерционного управления моментом двигателя М в соответствии с требуемым моментом М , пропорциональным величине входного воздействия, т.е. для обеспечения ра- венства , необходимо обеспечить управление мгновенной амплитудой фазных токов статора ij и мгновенной частотой фазных токов статора Ug при
104
котором фаза тока статора (пространственный угол вектора тока статора is) и фаза потокосцепления ротора (пространственный угол вектора потокосцепления ротора должны быть сдвинуты на угол, который либо поддерживается постоянным в направлении, определяемом направлением требуемого момента, либо связанно изменяется при изменении требуемого момента М по закону, определяемому критериями качества асинхронного электропривода.
Закон управления при безыкнерци- онном управлении моментом в динамике определяеуся из дифференциальных уравнений роторной цепи, выраженных через ортогональные составляющие вектора тока статора в системе координат х, у, ориентированной относительно вектора потокосцепления ротора «у.
Условия ориентирования имеют вид:
(1)
где ( угловая скорость вращения координат, равная угловой частоте потокЪсцепления рото- ра; U) - угловая скорость (частота)
вращения ротора;
До)- дополнительная частота, равная скольжению потокосцепления ротора относительно ротора.
Скольжение потокосцепления ротора йиКфиг. 3) равно скорости изменения угла между вектором потокосцепления
ротора Ц ., и осью ротора (ли ;5г-)
О-Ъ
При. соблюдении условия (1) известные дифференциальные уравнения, определяющие связь между модулем вектора потокосцепления ротора «f, ортогоиаль нь1ми составляющими вектора is is , igv) и моментом двигателя, имеют вид
Lr dVr . ,, т ч . р- зг-
R dt
I-
М- - rj I , - о Zp --
(2) (3) (A)
Z 2 P L,
гласно векторной диаграмме (фиг. З) is is-sin i/; I J- 51443.1
Угол f-if в уравнениях (5) и на век- торной диаграмме (фиг. 3) составлен между пространственным вектором тока статора ip и пространственным вектором потокосцепления ротора V и ха- рактеризует сдвиг фаз тока статора и потокосцеплекия ротора для каждой из фаз а, Ъ, с асинхронного двигателя.
Из дифференциального уравнения (2) с учетом (5) получают передаточную функцию для модуля вектора потокосцепления ротора
VP
где Т -- - электромагнитная посто- янная времени ротора; L - индуктивность ротора; Rf, - активное сопротивление
ротора. Из уравнений (З) и (5) следует
М 2 ZP i.sini. (7)
Статический коэффициент передачи
по, моменту для заданной квадратичной
л величины тока статора ij с учетом
(6) и (7) зависит от угла ,фазово- го сдвига тока статора относительно потокосцепления ротора
3 L 2 Р bf os i sinfc. .
Из (8.) следует, что для обеспече- ния максимума момента при заданной величине тока статора необходимо управлять фазой тока статора с фазовым
(8)
сдвигом относительно фазы потокосцепления ротора, удовлетворяющим условию
L-.. 0 (9)
5Т. ц.
Из уравнения (9) с учетом условий ориентирования (1), согласно которым справедливо условие:
COSilf-70,(10)
следует оптимальный закон управления асинхронным двигателем по максимуму момента
II
F - + Л L Lf - -Т
(11)
55
Знак + в выражении (11) соответствует йоложительному направлению момента двигателя.
.1
.106
Следствием оптимального закона управления (11) является равенство величин ортогональных составляюищх проекций вектора тока статора 1 при ориентации по вектору потокосцепления ротора ,:
i5, ±is, .(12)
Проекция вектора тока статора i не изменяет своего знака при изменении направления момента и характеризует потокообразуюЕО ю составляющую тока статора, равную проекции вектора тока статора на ось, направление которой совпадает с вектором потокосцепления ротора.
Ортогональная к этой оси составляющая тока статора i характеризует моментообразующую составляющую тока статора, знак которой определяется направлением момента.
Согласно векторной диаграмме (фиг. 3) угловая частота вращения вектора тока статора относительно оси статора
(О i + Ellf S dt dt dt at
(13)
0
0
5
0
5
где д - фаза тока статора;
А - угловое положение ротора; Ч., - фазовый сдвиг потокосцепления ротора относительно оси ротора.
Так как угол сдвига между фазами ic и (постоянен по величине соглас л с
НО закону управления (11) и г- 0,
о. и
то при оптимальном управлении по закону и 1J частота тока статора равна частоте потокосцепления ротора, в том числе и в динамических режимах изменения момента:
(14)
мгновенная частоШд ам-лы,
где 0.5 gта тока статора и потокосцепления ротора;
(л) угловая частота вращения ротора;
йы - дополнительная частота или скольжение потокосцепления ротора, характеризующее скорость относительного вращения вектора потокосцепления ротора относительно ротора. Скольжение тока статора и потоко- сцепление ротора в режиме управления
(ll) одинаковы, н связи с чем режим оптимального управления фазой тока статора (11) может быть реализован при управлении в полярных координатах путем изменения модуля вектора тока статора (мгновенной амплитуды тока статора) и аргумента вектора тока статора (фазы тока статора). Фаза тока статора 5 формируется с помощью формирователя 5 фазных задающих сигналов тока статора -sfc sc и отрабатывается силовым преобразователем 6 тока с помощью отрицательных обратных связей по мгновенным фаз- ным токам и регуляторов 11-13 мгновенных фазных токов
isc((t) is,,(t); isfc(t)i sb(t); i5c(t)i sc(t).
Для исключения обратной связи по положению ротора А в моментном асинхронном электроприводе (фиг, 1) используется управление частотой тока статора как суммы измеренной скорости вращения ротора u; (с помощью датчика 7 скорости.вращения, например с помощью тахогенератора) и дополнительной частоты Ли), равной скольжению тока статора и потокосцепления ротора, с последующим преобразованием сигнала задания частоты тока WSB заДания фазы тока статора 5 Su.(|t)dt.
При оптимальном законе управления (и) дополнительная частота определяется согласно уравнению (3 ) пропорционально отношению моментообразу- ющей составляющей тока статора i к величине потокосцепления ротора, равной модулю вектора потокосцепления ротора is.(t)
.,, Rf т
/ILu - -- Ь
L (t)
(15)
При изменении момента М в режиме (11) в функции момента изменяются как амплитуда тока статора ig так и амплитуда потокосцепления ц) в связи с тем, что согласно уравнениям (5) JQ
i - 1
v /Т/Т
-ST
S2
Согласно уравнению (б) величина . потокосцепления ротора v,,(t) изменя
ется с запаздыванием по отношению к изменению величины тока статора is(t). Постоянная времени апериодического процесса изменения величины потокосцепления ротора равна электромагнитной ПОСТОЧ.-1НОЙ времени ротора Т,,, в связи С чем через время Т ДТ,, после изменения момента величина потокосцепления ротора достигает своего установившегося значения, определяемого в функции момента согласно уравнениям (2), (4), (16) и (17):
(18)
где Lf - установившееся значение величины потокосцепления ротора , равной модулю вектора потокосцепления ротора. Установившееся значение величины тока статора определяется установившейся величиной потокосцепления ротора согласно уравнениям (2) и (16);
i,
(19)
2530
ос 40
Переходный процесс изменения ве - потокосцепления ротора из одного установившегося значения в другое установившееся значение v вы- зьшает необходимость для выполнения закона (11) формировать . связанные переходные процессы изменения величины тока статора и дополнительной частоты 3ц; в функции текущей величины потокосцепления ротора Vr( t).
Из уравнений (4) и- (17) следует уравнение, связывающее процессы изменения мгновенных амплитуд тока статора и потокосцепления ротора в функции времени при изменении момента двигателя в режиме управления по Зепко- ну (11):
,- (tb-/2 . 3ZpL -цГДП
(20)
Q
a из уравнений (15) и (17) следует уравнение связи процессов изменения скольжения тока статора (дополнительной частоты Ли)) и мгновенной амплитуды потокосцепления ротора
55
R 2L M(t)
Г/зг vFtT
(21)
Процессы управления током статора по предлагаемому способу описываются уравнениями (20), (14) и (21) и определяют процессы выполнения взаимосвязанных действий над двигателем путем изменения величины и частоты тока статора при изменении входного воздействия момеитного электропривода М (t)M(t).
Для исключения информации о величине сложно измеряемого потокосцепления ротора используют решение дифференциального уравнения (2) при ус- ловии выполнения закона оптимального управления (11) и его следствия - равенства моментообразующей и пото- кообразующих составляющих тока статора 15,, lij Nis/T.
Из уравнений (16) и (20) следует, что при управлении по закону (11) по- токообразующая составляклцая тока статора ijy, равная проекции вектора то- ка статора i j на ось вектора потоко- сцепления ротора V., определяется отношением величины момента двигателя к текущей величине потокосцепления ротора 4 p(t) :
, 2Lr M(t)
Требуемая связь величины потоков сцепления ротора 4 f и величины момен- та двигателя М, пропорциональной входному воздействию, определяется подстановкой выражения для потокооб- разующей составляющей тока статора в правую часть дифференциально- го уравнения (2):
br.l.(j).,,(...),.,23, откуда с учетом равенства
%Ш .v.(t)
(22)
Ч dt
(24)
получают дифференциальное уравнение для квадратичной величины потокосцеп-45 ления ротора при изменении момента в режиме управления по закону (11)
1 (l + i(t) bM(.t). (25) R atf J/jp
При скачке момента двигателя от начального значения Мд до конечного значения М квадратичная величина потокосцепления ротора изменяется по закону, определяемому решением диф-
ференциального уравнения (25):
2t
V ,(t) (M,-M), (26)
где M(j; - начальное значение момента при установившейся начальной величине потокосцепления poTofa, определяемой условием установившегося режима (18).
Как следует из уравнения (26), в режиме управления по закону (11) переходный процесс изменения величины потокосцепления ротора происходит в два раза быстрее, чем следует непосредственно из уравнения (2), что обеспечивается резкой форсировкой величины тока статора и потокообразующей составляющей тока статора в начальный период времени после скачка момента согласно уравнениям (20) и (22) с последующим быстрым ослаблением форсиро ки по мере нарастания потокосцепления ротора до нового установившегося значения. Это обеспечивает инвариантное управление моментом независимо от текущих Величин потокосцепления ротора и тока статора в переходном процессе формирования оптимального уровня величины потокосцепления ротора.
Подставляя закон изменения величины потокосцепления ротора из уравнения (26) в уравнения (20) и (2), получают законы инвариантного управления моментом при оптимальном по максимуму моменте управления потокосцеп- лением ротора для систем с фазо-ча- стотно-токовым управлением, исходя из условия инвариантности момента M(t)M (t):
(27)
(28)
Способ управления величиной тока статора is(t) в зависимости от входного воздействия реализуется для случая одной полярности зада1шя по моменту с помощью второго элемента 16 деления, апериодического звена 14, элемента пропорционального преобразования 18 и описанных связей между ними.
Управление мгновенной частотой тока статора осуществляется с помощью сумматора 17, на первый вход 9 которого поступает сигнал с выхода датчика 7 скорости вращения (например, выходное напряжение тахогенератора), который пропорционален частоте вращения ротора и). На второй вход сумматора 17 поступает выходной сигнал пер вого элемента 15 деления, с помощью которого осуществляют управление до- « полнительной частотой.3w, равной скольжению тока статора и потокосцеп- ления ротора относительно ротора с заданным соотношением коэффициентов делимого и делителя для первого элемента 15 деления.
Входные сигналы и выходной сигнал сумматора 17 могут принимать как по- ложительные, так и отрицательные значения, направление вращения векторов тока статора и потокосцепления ротора задают в зависимости от знака выходного сигнала сумматора 17 с помощью релейного элемента 19, выходной сиг/У
10
нал которого О или I определяет направление вращения вектора ig, который формируется с помощью формирователя 5 фазных задающих сигналов тока статора в зависимости от сигнала задания мгновенной амплитуды тока статора ig, поступающего с выхода 3, который образован элементом 18 пропорционального преобразования, и в зависимости от сигнала задания мгновенной частоты тока статора Ujg, поступающего с выхода 4, который образован выходом сумматора 17.
При изменении входного воздействия моментного электропривода, поступающего с выхода блока I задания момента, с помощью формирователя 2 управляющих воздействий задают величину и частоту тока статора.
-Ш
W
15
17 (О s
Х)
си
/у
-к
Piie.2
Ось ротора
Ось статора
X
uz.3
