Изобретение относится к области обработки металлов давлением и может быть использовано в радиально-обжимных машинах (РОМ).
Традиционный метод работы ковочного механизма заключается в устройстве и наладке его, когда бойки производят удары по заготовке синхронно (4х1) т.е. все четыре бойка одновременно приходят в точку удара. (см. "Технология ротационной ковки и вальцовки" Н.А. Шестаков, А.А. Шевченко, Москва "Высшая школа" 1988 г. Учебное пособие, с. 104).
Вместе с тем, появляется необходимость в технологии ковки на четырехбойковых РОМ (для осуществления способов ковки с безотходной технологией получения поковок толстостенных труб (например по патентам России N 2000161, 2010655), где работа бойков должна вестись попеременно: то согласовано (синхронно) в режиме 4х1 - одновременный удар, то попарно - в режиме 2х2, т. е. два диаметрально расположенных бойка ударяют по поковке, два других от поковки удалены.
Т.е. появляется необходимость изменять попарный порядок нанесения ударов в процессе ковки - изменять технологию (режим) ковки.
Настоящий уровень проектирования РОМ позволяет обеспечить такую технологию одним из методов описанных ниже:
- настройкой ковочного механизма РОМ при сборке
- сдвоенными ковочными механизмами одной РОМ, с бойками одного механизма работающими рассогласовано относительно бойков другого ковочного механизма, т.е.
где x - знак одновременности (патент Австрии N 276009, B 21 J 7/14, 1969 г.)
Каждый описанный метод имеет существенные недостатки:
для изменения режима ковки, в первом случае, требуется остановка и переналадка ковочного механизма с разборкой и последующей сборкой;
второй метод характерен работой бойков в разнесенных вертикальных плоскостях, что не обеспечивает безотходную технологию по осуществлению патентов 2000161, 2010655.
В качестве прототипа принят ковочный механизм и способ управления его работой, известные из а.с. SU 716697, B 21 J 7/16, 1980 г.
Традиционное управление четырехбойковой РОМ сводится к включению ковочного механизма, т.е. к двум командам: "Пуск", "Стоп".
В этом случае, как правило, работа бойков происходит синхронно только в режиме 4х1 - все 4 бойка одновременно ударяют по поковке. Либо, при соответствующей сборке, осуществляется работа ковочного механизма только рассогласованно, т.е. два бойка одной линии одновременно ударяют по поковке, два - от поковки удалены (2х2).
Изменение режима работы ковочного механизма связано с остановкой, разборкой, перенастройкой, последующей сборкой и отладкой.
Предлагаемое устройство и способ управления позволяют в процессе работы ковочного механизма изменять режимы ковки, переходя с режима 4х1 на режим 2х2 и обратно с кратковременной остановкой привода, но без переналадки и последующей настройки.
В основе управления работой ковочного механизма заложена возможность осуществлять реверс электропривода (фиг. 4), а отсюда, изменение режима работы, который осуществляется по следующей схеме управления: включение (кнП) - режим 1 - 4х1 ---> "Стоп"---> включение (кнЛ) режим П 2х2; или, что то же самое: вращение привода в одну сторону по часовой стрелке ---> "Стоп" ---> вращение привода в другую сторону - против часовой стрелки фиг. 1, 4.
Таким образом, переход с режима на режим осуществляется изменением направлений вращения электропривода и соответствующим перестроением элементов устройства управления, которые, в свою очередь, изменяют положение эксцентриковых валов управляемой пары бойков относительно эксцентриковых валов другой пары.
При смене режима работы первоначально воздействуют на электропривод, которым осуществляют останов ковочного механизма, а затем реверс.
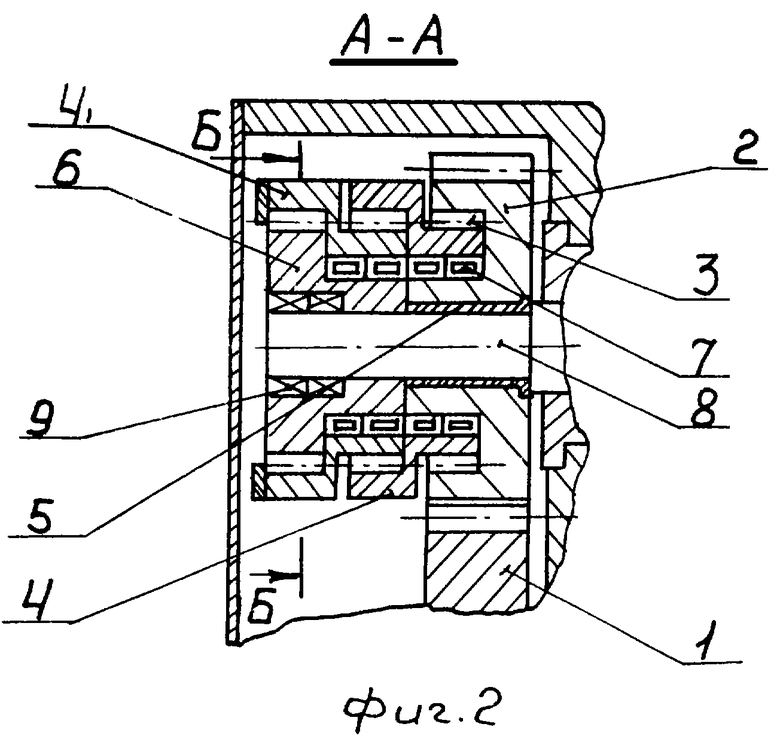
Далее в работу включается устройство управления размещенное на концах эксцентриковых валов с диаметральным расположением бойков, как изображено на фиг.1 - два места А-А.
Таким образом, в сравнении с традиционной структурой ковочного механизма четырехбойковой РОМ, в предлагаемом изобретении, добавляется устройство управления парой бойков.
Устройство управления представляет собой секционную конструкцию сопряженных пар элементов, функциональное назначение которых аналогично назначению элементов обгонной муфты свободного хода двухстороннего действия. (Справочник по муфтам под редакцией Поляков В.С. издательство "Машиностроение" издание II, Ленинград, 1979 г., с. 215.
В предлагаемой конструкции устройство управления можно рассматривать и как преобразователь угла поворота сопряженных пар управляющих элементов в угол смещения эксцентриковых валов управляемой пары бойков на 180o по отношению к положению эксцентриковых валов неуправляемой пары.
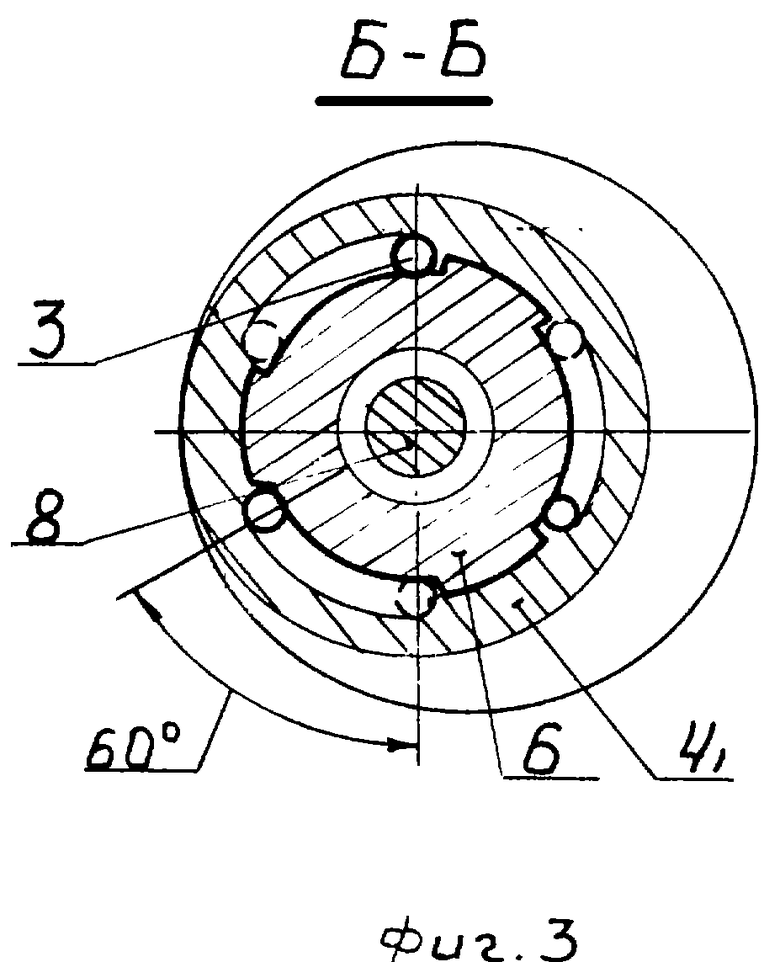
Причем, каждая сопряженная пара устройства управления "Звезда" и "Обойма" осуществляет фрагментарное действие, а именно - обеспечивает свободный пробег в пределах заданного угла α (60o) при фиксированном положении эксцентрикового вала и лишь разворот последнего звена устройства приводит к реализации способа.
Таким образом, смена режима работы осуществляется путем изменения положения эксцентриковых валов управляемой пары бойков относительно положения эксцентриковых валов неуправляемой пары.
Первоначально управление осуществляется реверсом электропривода, а далее устройством управления, размещенном на концах двух эксцентриковых валов диаметрально расположенных бойков.
Устройство состоит из реверсивного электропривода (фиг. 1, 4) колес 1, "шестерен-обойм" 2 (фиг. 2, 3), сидящих свободно на втулках 5, роликов 3, "звезды-обоймы" 4 и 41, (два элемента в устройстве, "звезды" 6, подшипников 7, эксцентрикового вала 8, бесшпоночного неподвижного соединения 9, элементов исполнительного механизма (кулисного камня, кулисы, бойков) 10. На фиг. 1 выделен боек, на фиг. 3 - условно изображен эксцентрик.
Сопряженные пары устройства управления 4-2, 4-41, 41-6 (фиг. 2) снабжены роликами 3, которые в крайних положениях заклинивают эти пары между собой. Сопряженная пара "звезда-обойма" 4-41, посажена на подшипники 7. "Звезда" 6 и эксцентриковый вал 8 жестко связаны между собой бесшпоночным соединением 9. "Шестерня-обойма" 2 свободно сидит на втулке 5, на эксцентриковом валу 8.
Работает устройство следующим образом. Первоначально необходимо принять условие: механизм собран так, что его запуск от кнопки кн. II (слева-направо) обеспечивает синхронную работу бойков (4х1). Тогда все четыре эксцентриковых вала ковочного механизма вращаются в одной фазе, обеспечивая синхронную работу бойков.
Переход на режим работы 2х2 происходит следующим образом. Нажатием кнопки "Стоп" останавливаем ковочный механизм. При запуске ковочного механизма от кнопки "Л" (справа-налево) электропривод начнет вращаться в другую сторону. Через паразитное колесо 1' начнет вращаться в другую сторону колесо 1, увлекая "шестерню-обойму" 2.
"Шестерня-обойма" 2 выбрав зазор α = 60o в пазу "звезды-обоймы" 4 (фиг. 3) заклинит ее. Та, в свою очередь, выбрав зазор заклинит "звезду-обойму" 41.
"Звезда" 6 будет заклинена, соответственно, "звездой-обоймой" 41. Выбрав зазор в пазах последней пары 41-6, начнет проворачиваться, воздействуя на бесшпоночное соединение 9, эксцентриковый вал 8.
Таким образом, будет выбран суммарный зазор в пазах сопряженных пар α × п = 180o общий случай; из расчета на прочность в конкретном случае 60х3 = 180o.
За время выбора зазора во всех сопряженных парах, эксцентриковые валы управляемой пары бойков остаются фиксированными в результате инерционности узлов и деталей ковочного механизма.
За то же время, пока выбирался суммарный зазор в пазах сопряженных пар, эксцентриковкие валы неуправляемой пары бойков развернуться на те же 180o.
Таким образом, эксцентриковые валы управляемой и неуправляемой пары бойков войдут в разные фазы вращения, сместившись на 180o своими эксцентриками. В результате чего состоится переход на режим ковки 2х2, а бойки управляемой пары включаться в работку.
Заложенные в основу устройства управления элементы обгонной муфты свободного хода двойного действия не претерпевают существенного изменения, а конфигурация сопряженных элементов подчинена функциональной необходимости и сведена к рабочим профилям "звезда", "обойма".
Конструкция обгонной муфты свободного хода двойного действия широко известна из литературы и практического использования.
Таким образом, подтверждается возможность осуществления предлагаемого устройства.
Признаки устройства и способа перечисленные выше и характеризующие изобретение являются существенными, т.к каждый из них связан причинно-следственной связью с техническим результатом, по патентам 2010655 и 2000161, т.е. обеспечение технологии безотходного производства получения толстостенных труб и кольцевых поковок из круга.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХБОЙКОВОЕ КОВОЧНОЕ УСТРОЙСТВО | 2003 |
|
RU2242321C1 |
| РАДИАЛЬНО-ОБЖИМНАЯ МАШИНА | 2003 |
|
RU2268104C2 |
| КРИВОШИПНО-КУЛИСНЫЙ КЛИНОВОЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2001 |
|
RU2228266C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОКОВОК КВАДРАТНОГО ИЛИ ПРЯМОУГОЛЬНОГО ПОПЕРЕЧНОГО СЕЧЕНИЯ | 2005 |
|
RU2283715C1 |
| СПОСОБ УСТАНОВКИ И ФИКСИРОВАНИЯ РАБОЧИХ ОРГАНОВ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2000 |
|
RU2191696C2 |
| ИНСТРУМЕНТ ДЛЯ РАДИАЛЬНОЙ КОВКИ | 2003 |
|
RU2240199C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛЫХ ПОКОВОК | 2009 |
|
RU2421295C1 |
| СПОСОБ ПОЛУЧЕНИЯ КАЛИБРОВАННЫХ ПОКОВОК В ЧЕТЫРЕХБОЙКОВОМ КОВОЧНОМ УСТРОЙСТВЕ | 2004 |
|
RU2283716C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛЫХ ПОКОВОК И КОВОЧНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486985C2 |
| ЧЕТЫРЕХБОЙКОВОЕ КОВОЧНОЕ УСТРОЙСТВО | 2005 |
|
RU2314175C2 |
Изобретение относится к области обработки металлов давлением и может быть использовано в радиально-обжимных ковочных машинах. В четырехбойковой машине в ковочный механизм вводится устройство, позволяющее изменять режимы ковки, размещенное на эксцентриковых валах управляемой пары бойков. Способ управления работой ковочного механизма заключается в смещении эксцентриковых валов одной пары бойков относительно эксцентриковых валов другой пары на 180o. Смена режимов ковки осуществляется в процессе ковки без переналадки радиально-обжимной машины. Изобретение позволяет расширить технологические возможности и повысить производительность радиально-обжимной машины. 2 с. и 4 з.п.ф-лы, 4 ил.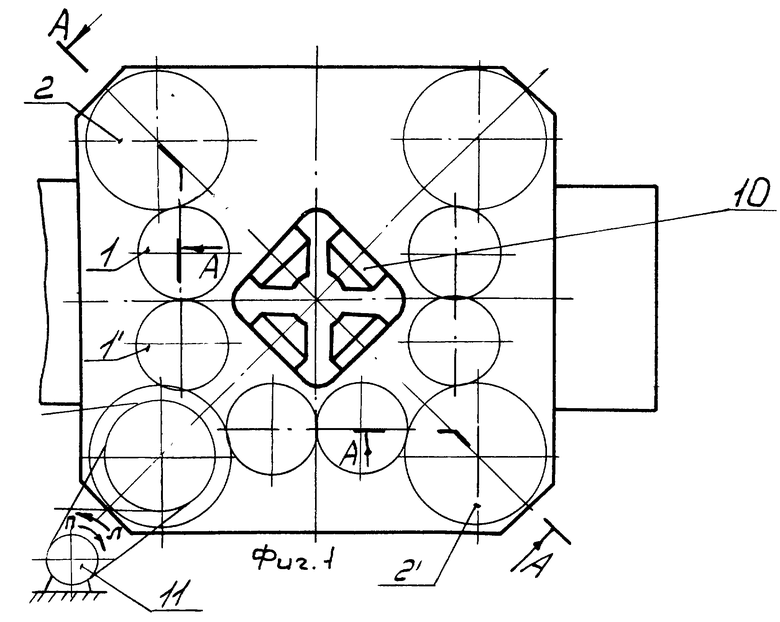
| Радиально-ковочная машина | 1976 |
|
SU716697A1 |
| Радиально-ковочная машина | 1976 |
|
SU708589A1 |
| Радиально-ковочная машина | 1976 |
|
SU671104A1 |
| КОВОЧНЫЙ АГРЕГАТ ДЛЯ ПРОТЯЖКИ ШТАНГ | 1991 |
|
RU2010656C1 |
| US 4461163 A, 24.07.84 | |||
| DE 3803632 A1, 17.08.89. | |||

